Getting Started
Thank you for your interest in contributing to Rust! There are many ways to contribute, and we appreciate all of them.
If this is your first time contributing, the walkthrough chapter can give you a good example of how a typical contribution would go.
This documentation is not intended to be comprehensive; it is meant to be a quick guide for the most useful things. For more information, see this chapter on how to build and run the compiler.
Asking Questions
If you have questions, please make a post on the Rust Zulip server or
internals.rust-lang.org. If you are contributing to Rustup, be aware they are not on
Zulip - you can ask questions in #wg-rustup on Discord.
See the list of teams and working groups and the Community page on the
official website for more resources.
As a reminder, all contributors are expected to follow our Code of Conduct.
The compiler team (or t-compiler) usually hangs out in Zulip in this
"stream"; it will be easiest to get questions answered there.
Please ask questions! A lot of people report feeling that they are "wasting
expert time", but nobody on t-compiler feels this way. Contributors are
important to us.
Also, if you feel comfortable, prefer public topics, as this means others can see the questions and answers, and perhaps even integrate them back into this guide :)
Experts
Not all t-compiler members are experts on all parts of rustc; it's a
pretty large project. To find out who could have some expertise on
different parts of the compiler, consult triagebot assign groups.
The sections that start with [assign* in triagebot.toml file.
But also, feel free to ask questions even if you can't figure out who to ping.
Another way to find experts for a given part of the compiler is to see who has made recent commits.
For example, to find people who have recently worked on name resolution since the 1.68.2 release,
you could run git shortlog -n 1.68.2.. compiler/rustc_resolve/. Ignore any commits starting with
"Rollup merge" or commits by @bors (see CI contribution procedures for
more information about these commits).
Etiquette
We do ask that you be mindful to include as much useful information as you can in your question, but we recognize this can be hard if you are unfamiliar with contributing to Rust.
Just pinging someone without providing any context can be a bit annoying and
just create noise, so we ask that you be mindful of the fact that the
t-compiler folks get a lot of pings in a day.
What should I work on?
The Rust project is quite large and it can be difficult to know which parts of the project need help, or are a good starting place for beginners. Here are some suggested starting places.
Easy or mentored issues
If you're looking for somewhere to start, check out the following issue search. See the Triage for an explanation of these labels. You can also try filtering the search to areas you're interested in. For example:
repo:rust-lang/rust-clippywill only show clippy issueslabel:T-compilerwill only show issues related to the compilerlabel:A-diagnosticswill only show diagnostic issues
Not all important or beginner work has issue labels. See below for how to find work that isn't labelled.
Recurring work
Some work is too large to be done by a single person. In this case, it's common to have "Tracking issues" to co-ordinate the work between contributors. Here are some example tracking issues where it's easy to pick up work without a large time commitment:
- Rustdoc Askama Migration
- Diagnostic Translation
- Move UI tests to subdirectories
- Port run-make tests from Make to Rust
If you find more recurring work, please feel free to add it here!
Clippy issues
The Clippy project has spent a long time making its contribution process as friendly to newcomers as possible. Consider working on it first to get familiar with the process and the compiler internals.
See the Clippy contribution guide for instructions on getting started.
Diagnostic issues
Many diagnostic issues are self-contained and don't need detailed background knowledge of the compiler. You can see a list of diagnostic issues here.
Picking up abandoned pull requests
Sometimes, contributors send a pull request, but later find out that they don't have enough
time to work on it, or they simply are not interested in it anymore. Such PRs are often
eventually closed and they receive the S-inactive label. You could try to examine some of
these PRs and pick up the work. You can find the list of such PRs here.
If the PR has been implemented in some other way in the meantime, the S-inactive label
should be removed from it. If not, and it seems that there is still interest in the change,
you can try to rebase the pull request on top of the latest master branch and send a new
pull request, continuing the work on the feature.
Contributing to std (standard library)
See std-dev-guide.
Contributing code to other Rust projects
There are a bunch of other projects that you can contribute to outside of the
rust-lang/rust repo, including cargo, miri, rustup, and many others.
These repos might have their own contributing guidelines and procedures. Many of them are owned by working groups. For more info, see the documentation in those repos' READMEs.
Other ways to contribute
There are a bunch of other ways you can contribute, especially if you don't
feel comfortable jumping straight into the large rust-lang/rust codebase.
The following tasks are doable without much background knowledge but are incredibly helpful:
- Cleanup crew: find minimal reproductions of ICEs, bisect regressions, etc. This is a way of helping that saves a ton of time for others to fix an error later.
- Writing documentation: if you are feeling a bit more intrepid, you could try to read a part of the code and write doc comments for it. This will help you to learn some part of the compiler while also producing a useful artifact!
- Triaging issues: categorizing, replicating, and minimizing issues is very helpful to the Rust maintainers.
- Working groups: there are a bunch of working groups on a wide variety of rust-related things.
- Answer questions in the Get Help! channels on the Rust Discord server, on users.rust-lang.org, or on StackOverflow.
- Participate in the RFC process.
- Find a requested community library, build it, and publish it to Crates.io. Easier said than done, but very, very valuable!
Cloning and Building
See "How to build and run the compiler".
Contributor Procedures
This section has moved to the "Contribution Procedures" chapter.
Other Resources
This section has moved to the "About this guide" chapter.
About this guide
This guide is meant to help document how rustc – the Rust compiler – works, as well as to help new contributors get involved in rustc development.
There are seven parts to this guide:
- Building
rustc: Contains information that should be useful no matter how you are contributing, about building, debugging, profiling, etc. - Contributing to
rustc: Contains information that should be useful no matter how you are contributing, about procedures for contribution, using git and Github, stabilizing features, etc. - High-Level Compiler Architecture: Discusses the high-level architecture of the compiler and stages of the compile process.
- Source Code Representation: Describes the process of taking raw source code from the user and transforming it into various forms that the compiler can work with easily.
- Analysis: discusses the analyses that the compiler uses to check various properties of the code and inform later stages of the compile process (e.g., type checking).
- From MIR to Binaries: How linked executable machine code is generated.
- Appendices at the end with useful reference information. There are a few of these with different information, including a glossary.
Constant change
Keep in mind that rustc is a real production-quality product,
being worked upon continuously by a sizeable set of contributors.
As such, it has its fair share of codebase churn and technical debt.
In addition, many of the ideas discussed throughout this guide are idealized designs
that are not fully realized yet.
All this makes keeping this guide completely up to date on everything very hard!
The Guide itself is of course open-source as well, and the sources can be found at the GitHub repository. If you find any mistakes in the guide, please file an issue about it. Even better, open a PR with a correction!
If you do contribute to the guide, please see the corresponding subsection on writing documentation in this guide.
“‘All conditioned things are impermanent’ — when one sees this with wisdom, one turns away from suffering.” The Dhammapada, verse 277
Other places to find information
You might also find the following sites useful:
- This guide contains information about how various parts of the compiler work and how to contribute to the compiler.
- rustc API docs -- rustdoc documentation for the compiler, devtools, and internal tools
- Forge -- contains documentation about Rust infrastructure, team procedures, and more
- compiler-team -- the home-base for the Rust compiler team, with description of the team procedures, active working groups, and the team calendar.
- std-dev-guide -- a similar guide for developing the standard library.
- The t-compiler zulip
#contributeand#wg-rustupon Discord.- The Rust Internals forum, a place to ask questions and discuss Rust's internals
- The Rust reference, even though it doesn't specifically talk about Rust's internals, is a great resource nonetheless
- Although out of date, Tom Lee's great blog article is very helpful
- rustaceans.org is helpful, but mostly dedicated to IRC
- The Rust Compiler Testing Docs
- For @bors, this cheat sheet is helpful
- Google is always helpful when programming. You can search all Rust documentation (the standard library, the compiler, the books, the references, and the guides) to quickly find information about the language and compiler.
- You can also use Rustdoc's built-in search feature to find documentation on
types and functions within the crates you're looking at. You can also search
by type signature! For example, searching for
* -> vecshould find all functions that return aVec<T>. Hint: Find more tips and keyboard shortcuts by typing?on any Rustdoc page!
How to build and run the compiler
- Quick Start
- Get the source code
- What is
x.py? - Create a
config.toml - Common
xcommands - Creating a rustup toolchain
- Building targets for cross-compilation
- Other
xcommands - Remarks on disk space
The compiler is built using a tool called x.py. You will need to
have Python installed to run it.
Quick Start
For a less in-depth quick-start of getting the compiler running, see quickstart.
Get the source code
The main repository is rust-lang/rust. This contains the compiler,
the standard library (including core, alloc, test, proc_macro, etc),
and a bunch of tools (e.g. rustdoc, the bootstrapping infrastructure, etc).
The very first step to work on rustc is to clone the repository:
git clone https://github.com/rust-lang/rust.git
cd rust
Partial clone the repository
Due to the size of the repository, cloning on a slower internet connection can take a long time, and requires disk space to store the full history of every file and directory. Instead, it is possible to tell git to perform a partial clone, which will only fully retrieve the current file contents, but will automatically retrieve further file contents when you, e.g., jump back in the history. All git commands will continue to work as usual, at the price of requiring an internet connection to visit not-yet-loaded points in history.
git clone --filter='blob:none' https://github.com/rust-lang/rust.git
cd rust
NOTE: This link describes this type of checkout in more detail, and also compares it to other modes, such as shallow cloning.
Shallow clone the repository
An older alternative to partial clones is to use shallow clone the repository instead.
To do so, you can use the --depth N option with the git clone command.
This instructs git to perform a "shallow clone", cloning the repository but truncating it to
the last N commits.
Passing --depth 1 tells git to clone the repository but truncate the history to the latest
commit that is on the master branch, which is usually fine for browsing the source code or
building the compiler.
git clone --depth 1 https://github.com/rust-lang/rust.git
cd rust
NOTE: A shallow clone limits which
gitcommands can be run. If you intend to work on and contribute to the compiler, it is generally recommended to fully clone the repository as shown above, or to perform a partial clone instead.For example,
git bisectandgit blamerequire access to the commit history, so they don't work if the repository was cloned with--depth 1.
What is x.py?
x.py is the build tool for the rust repository. It can build docs, run tests, and compile the
compiler and standard library.
This chapter focuses on the basics to be productive, but
if you want to learn more about x.py, read this chapter.
Also, using x rather than x.py is recommended as:
./xis the most likely to work on every system (on Unix it runs the shell script that does python version detection, on Windows it will probably run the powershell script - certainly less likely to break than./x.pywhich often just opens the file in an editor).1
(You can find the platform related scripts around the x.py, like x.ps1)
Notice that this is not absolute. For instance, using Nushell in VSCode on Win10,
typing x or ./x still opens x.py in an editor rather than invoking the program. :)
In the rest of this guide, we use x rather than x.py directly. The following
command:
./x check
could be replaced by:
./x.py check
Running x.py
The x.py command can be run directly on most Unix systems in the following format:
./x <subcommand> [flags]
This is how the documentation and examples assume you are running x.py.
Some alternative ways are:
# On a Unix shell if you don't have the necessary `python3` command
./x <subcommand> [flags]
# In Windows Powershell (if powershell is configured to run scripts)
./x <subcommand> [flags]
./x.ps1 <subcommand> [flags]
# On the Windows Command Prompt (if .py files are configured to run Python)
x.py <subcommand> [flags]
# You can also run Python yourself, e.g.:
python x.py <subcommand> [flags]
On Windows, the Powershell commands may give you an error that looks like this:
PS C:\Users\vboxuser\rust> ./x
./x : File C:\Users\vboxuser\rust\x.ps1 cannot be loaded because running scripts is disabled on this system. For more
information, see about_Execution_Policies at https:/go.microsoft.com/fwlink/?LinkID=135170.
At line:1 char:1
+ ./x
+ ~~~
+ CategoryInfo : SecurityError: (:) [], PSSecurityException
+ FullyQualifiedErrorId : UnauthorizedAccess
You can avoid this error by allowing powershell to run local scripts:
Set-ExecutionPolicy -ExecutionPolicy RemoteSigned -Scope CurrentUser
Running x.py slightly more conveniently
There is a binary that wraps x.py called x in src/tools/x. All it does is
run x.py, but it can be installed system-wide and run from any subdirectory
of a checkout. It also looks up the appropriate version of python to use.
You can install it with cargo install --path src/tools/x.
To clarify that this is another global installed binary util, which is
similar to the one declared in section What is x.py, but
it works as an independent process to execute the x.py rather than calling the
shell to run the platform related scripts.
Create a config.toml
To start, run ./x setup and select the compiler defaults. This will do some initialization
and create a config.toml for you with reasonable defaults. If you use a different default (which
you'll likely want to do if you want to contribute to an area of rust other than the compiler, such
as rustdoc), make sure to read information about that default (located in src/bootstrap/defaults)
as the build process may be different for other defaults.
Alternatively, you can write config.toml by hand. See config.example.toml for all the available
settings and explanations of them. See src/bootstrap/defaults for common settings to change.
If you have already built rustc and you change settings related to LLVM, then you may have to
execute rm -rf build for subsequent configuration changes to take effect. Note that ./x clean will not cause a rebuild of LLVM.
Common x commands
Here are the basic invocations of the x commands most commonly used when
working on rustc, std, rustdoc, and other tools.
| Command | When to use it |
|---|---|
./x check | Quick check to see if most things compile; rust-analyzer can run this automatically for you |
./x build | Builds rustc, std, and rustdoc |
./x test | Runs all tests |
./x fmt | Formats all code |
As written, these commands are reasonable starting points. However, there are
additional options and arguments for each of them that are worth learning for
serious development work. In particular, ./x build and ./x test
provide many ways to compile or test a subset of the code, which can save a lot
of time.
Also, note that x supports all kinds of path suffixes for compiler, library,
and src/tools directories. So, you can simply run x test tidy instead of
x test src/tools/tidy. Or, x build std instead of x build library/std.
See the chapters on testing and rustdoc for more details.
Building the compiler
Note that building will require a relatively large amount of storage space. You may want to have upwards of 10 or 15 gigabytes available to build the compiler.
Once you've created a config.toml, you are now ready to run
x. There are a lot of options here, but let's start with what is
probably the best "go to" command for building a local compiler:
./x build library
This may look like it only builds the standard library, but that is not the case. What this command does is the following:
- Build
stdusing the stage0 compiler - Build
rustcusing the stage0 compiler- This produces the stage1 compiler
- Build
stdusing the stage1 compiler
This final product (stage1 compiler + libs built using that compiler)
is what you need to build other Rust programs (unless you use #![no_std] or
#![no_core]).
You will probably find that building the stage1 std is a bottleneck for you,
but fear not, there is a (hacky) workaround...
see the section on avoiding rebuilds for std.
Sometimes you don't need a full build. When doing some kind of
"type-based refactoring", like renaming a method, or changing the
signature of some function, you can use ./x check instead for a much faster build.
Note that this whole command just gives you a subset of the full rustc
build. The full rustc build (what you get with ./x build --stage 2 compiler/rustc) has quite a few more steps:
- Build
rustcwith the stage1 compiler.- The resulting compiler here is called the "stage2" compiler.
- Build
stdwith stage2 compiler. - Build
librustdocand a bunch of other things with the stage2 compiler.
You almost never need to do this.
Build specific components
If you are working on the standard library, you probably don't need to build the compiler unless you are planning to use a recently added nightly feature. Instead, you can just build using the bootstrap compiler.
./x build --stage 0 library
If you choose the library profile when running x setup, you can omit --stage 0 (it's the
default).
Creating a rustup toolchain
Once you have successfully built rustc, you will have created a bunch
of files in your build directory. In order to actually run the
resulting rustc, we recommend creating rustup toolchains. The first
one will run the stage1 compiler (which we built above). The second
will execute the stage2 compiler (which we did not build, but which
you will likely need to build at some point; for example, if you want
to run the entire test suite).
rustup toolchain link stage0 build/host/stage0-sysroot # beta compiler + stage0 std
rustup toolchain link stage1 build/host/stage1
rustup toolchain link stage2 build/host/stage2
Now you can run the rustc you built with. If you run with -vV, you
should see a version number ending in -dev, indicating a build from
your local environment:
$ rustc +stage1 -vV
rustc 1.48.0-dev
binary: rustc
commit-hash: unknown
commit-date: unknown
host: x86_64-unknown-linux-gnu
release: 1.48.0-dev
LLVM version: 11.0
The rustup toolchain points to the specified toolchain compiled in your build directory,
so the rustup toolchain will be updated whenever x build or x test are run for
that toolchain/stage.
Note: the toolchain we've built does not include cargo. In this case, rustup will
fall back to using cargo from the installed nightly, beta, or stable toolchain
(in that order). If you need to use unstable cargo flags, be sure to run
rustup install nightly if you haven't already. See the
rustup documentation on custom toolchains.
Note: rust-analyzer and IntelliJ Rust plugin use a component called
rust-analyzer-proc-macro-srv to work with proc macros. If you intend to use a
custom toolchain for a project (e.g. via rustup override set stage1) you may
want to build this component:
./x build proc-macro-srv-cli
Building targets for cross-compilation
To produce a compiler that can cross-compile for other targets,
pass any number of target flags to x build.
For example, if your host platform is x86_64-unknown-linux-gnu
and your cross-compilation target is wasm32-wasip1, you can build with:
./x build --target x86_64-unknown-linux-gnu,wasm32-wasip1
Note that if you want the resulting compiler to be able to build crates that
involve proc macros or build scripts, you must be sure to explicitly build target support for the
host platform (in this case, x86_64-unknown-linux-gnu).
If you want to always build for other targets without needing to pass flags to x build,
you can configure this in the [build] section of your config.toml like so:
[build]
target = ["x86_64-unknown-linux-gnu", "wasm32-wasip1"]
Note that building for some targets requires having external dependencies installed
(e.g. building musl targets requires a local copy of musl).
Any target-specific configuration (e.g. the path to a local copy of musl)
will need to be provided by your config.toml.
Please see config.example.toml for information on target-specific configuration keys.
For examples of the complete configuration necessary to build a target, please visit the rustc book, select any target under the "Platform Support" heading on the left, and see the section related to building a compiler for that target. For targets without a corresponding page in the rustc book, it may be useful to inspect the Dockerfiles that the Rust infrastructure itself uses to set up and configure cross-compilation.
If you have followed the directions from the prior section on creating a rustup toolchain, then once you have built your compiler you will be able to use it to cross-compile like so:
cargo +stage1 build --target wasm32-wasip1
Other x commands
Here are a few other useful x commands. We'll cover some of them in detail
in other sections:
- Building things:
./x build– builds everything using the stage 1 compiler, not just up tostd./x build --stage 2– builds everything with the stage 2 compiler includingrustdoc
- Running tests (see the section on running tests for
more details):
./x test library/std– runs the unit tests and integration tests fromstd./x test tests/ui– runs theuitest suite./x test tests/ui/const-generics- runs all the tests in theconst-generics/subdirectory of theuitest suite./x test tests/ui/const-generics/const-types.rs- runs the single testconst-types.rsfrom theuitest suite
Cleaning out build directories
Sometimes you need to start fresh, but this is normally not the case. If you need to run this then bootstrap is most likely not acting right and you should file a bug as to what is going wrong. If you do need to clean everything up then you only need to run one command!
./x clean
rm -rf build works too, but then you have to rebuild LLVM, which can take
a long time even on fast computers.
Remarks on disk space
Building the compiler (especially if beyond stage 1) can require significant amounts of free disk
space, possibly around 100GB. This is compounded if you have a separate build directory for
rust-analyzer (e.g. build-rust-analyzer). This is easy to hit with dev-desktops which have a set
disk
quota
for each user, but this also applies to local development as well. Occassionally, you may need to:
- Remove
build/directory. - Remove
build-rust-analyzer/directory (if you have a separate rust-analyzer build directory). - Uninstall unnecessary toolchains if you use
cargo-bisect-rustc. You can check which toolchains are installed withrustup toolchain list.
issue#1707
Quickstart
This is a quickstart guide about getting the compiler running. For more information on the individual steps, see the other pages in this chapter.
First, clone the repository:
git clone https://github.com/rust-lang/rust.git
cd rust
When building the compiler, we don't use cargo directly, instead we use a
wrapper called "x". It is invoked with ./x.
We need to create a configuration for the build. Use ./x setup to create a
good default.
./x setup
Then, we can build the compiler. Use ./x build to build the compiler, standard
library and a few tools. You can also ./x check to just check it. All these
commands can take specific components/paths as arguments, for example ./x check compiler to just check the compiler.
./x build
When doing a change to the compiler that does not affect the way it compiles the standard library (so for example, a change to an error message), use
--keep-stage-std 1to avoid recompiling it.
After building the compiler and standard library, you now have a working compiler toolchain. You can use it with rustup by linking it.
rustup toolchain link stage1 build/host/stage1
Now you have a toolchain called stage1 linked to your build. You can use it to
test the compiler.
rustc +stage1 testfile.rs
After doing a change, you can run the compiler test suite with ./x test.
./x test runs the full test suite, which is slow and rarely what you want.
Usually, ./x test tests/ui is what you want after a compiler change, testing
all UI tests that invoke the compiler on a specific test file
and check the output.
./x test tests/ui
Use --bless if you've made a change and want to update the .stderr files
with the new output.
./x suggestcan also be helpful for suggesting which tests to run after a change.
Congrats, you are now ready to make a change to the compiler! If you have more questions, the full chapter might contain the answers, and if it doesn't, feel free to ask for help on Zulip.
If you use VSCode, Vim, Emacs or Helix, ./x setup will ask you if you want to
set up the editor config. For more information, check out suggested
workflows.
Prerequisites
Dependencies
See the rust-lang/rust INSTALL.
Hardware
You will need an internet connection to build. The bootstrapping process involves updating git submodules and downloading a beta compiler. It doesn't need to be super fast, but that can help.
There are no strict hardware requirements, but building the compiler is computationally expensive, so a beefier machine will help, and I wouldn't recommend trying to build on a Raspberry Pi! We recommend the following.
- 30GB+ of free disk space. Otherwise, you will have to keep clearing incremental caches. More space is better, the compiler is a bit of a hog; it's a problem we are aware of.
- 8GB+ RAM
- 2+ cores. Having more cores really helps. 10 or 20 or more is not too many!
Beefier machines will lead to much faster builds. If your machine is not very
powerful, a common strategy is to only use ./x check on your local machine
and let the CI build test your changes when you push to a PR branch.
Building the compiler takes more than half an hour on my moderately powerful laptop. We suggest downloading LLVM from CI so you don't have to build it from source (see here).
Like cargo, the build system will use as many cores as possible. Sometimes
this can cause you to run low on memory. You can use -j to adjust the number
of concurrent jobs. If a full build takes more than ~45 minutes to an hour, you
are probably spending most of the time swapping memory in and out; try using
-j1.
If you don't have too much free disk space, you may want to turn off incremental compilation (see here). This will make compilation take longer (especially after a rebase), but will save a ton of space from the incremental caches.
Suggested Workflows
The full bootstrapping process takes quite a while. Here are some suggestions to make your life easier.
- Installing a pre-push hook
- Configuring
rust-analyzerforrustc - Check, check, and check again
x suggest- Configuring
rustupto use nightly - Faster builds with
--keep-stage. - Using incremental compilation
- Fine-tuning optimizations
- Working on multiple branches at the same time
- Using nix-shell
- Shell Completions
Installing a pre-push hook
CI will automatically fail your build if it doesn't pass tidy, our internal
tool for ensuring code quality. If you'd like, you can install a Git
hook that will
automatically run ./x test tidy on each push, to ensure your code is up to
par. If the hook fails then run ./x test tidy --bless and commit the changes.
If you decide later that the pre-push behavior is undesirable, you can delete
the pre-push file in .git/hooks.
A prebuilt git hook lives at src/etc/pre-push.sh. It can be copied into
your .git/hooks folder as pre-push (without the .sh extension!).
You can also install the hook as a step of running ./x setup!
Configuring rust-analyzer for rustc
Project-local rust-analyzer setup
rust-analyzer can help you check and format your code whenever you save a
file. By default, rust-analyzer runs the cargo check and rustfmt commands,
but you can override these commands to use more adapted versions of these tools
when hacking on rustc. With custom setup, rust-analyzer can use ./x check
to check the sources, and the stage 0 rustfmt to format them.
The default rust-analyzer.check.overrideCommand command line will check all
the crates and tools in the repository. If you are working on a specific part,
you can override the command to only check the part you are working on to save
checking time. For example, if you are working on the compiler, you can override
the command to x check compiler --json-output to only check the compiler part.
You can run x check --help --verbose to see the available parts.
Running ./x setup editor will prompt you to create a project-local LSP config
file for one of the supported editors. You can also create the config file as a
step of running ./x setup.
Using a separate build directory for rust-analyzer
By default, when rust-analyzer runs a check or format command, it will share the same build directory as manual command-line builds. This can be inconvenient for two reasons:
- Each build will lock the build directory and force the other to wait, so it becomes impossible to run command-line builds while rust-analyzer is running commands in the background.
- There is an increased risk of one of the builds deleting previously-built artifacts due to conflicting compiler flags or other settings, forcing additional rebuilds in some cases.
To avoid these problems:
- Add
--build-dir=build-rust-analyzerto all of the customxcommands in your editor's rust-analyzer configuration. (Feel free to choose a different directory name if desired.) - Modify the
rust-analyzer.procMacro.serversetting so that it points to the copy ofrust-analyzer-proc-macro-srvin that other build directory.
Using separate build directories for command-line builds and rust-analyzer
requires extra disk space, and also means that running ./x clean on the
command-line will not clean out the separate build directory. To clean the
separate build directory, run ./x clean --build-dir=build-rust-analyzer
instead.
Visual Studio Code
Selecting vscode in ./x setup editor will prompt you to create a
.vscode/settings.json file which will configure Visual Studio code. The
recommended rust-analyzer settings live at
src/etc/rust_analyzer_settings.json.
If running ./x check on save is inconvenient, in VS Code you can use a Build
Task instead:
// .vscode/tasks.json
{
"version": "2.0.0",
"tasks": [
{
"label": "./x check",
"command": "./x check",
"type": "shell",
"problemMatcher": "$rustc",
"presentation": { "clear": true },
"group": { "kind": "build", "isDefault": true }
}
]
}
Neovim
For Neovim users there are several options for configuring for rustc. The easiest way is by using neoconf.nvim, which allows for project-local configuration files with the native LSP. The steps for how to use it are below. Note that they require rust-analyzer to already be configured with Neovim. Steps for this can be found here.
- First install the plugin. This can be done by following the steps in the README.
- Run
./x setup editor, and selectvscodeto create a.vscode/settings.jsonfile.neoconfis able to read and update rust-analyzer settings automatically when the project is opened when this file is detected.
If you're using coc.nvim, you can run ./x setup editor and select vim to
create a .vim/coc-settings.json. The settings can be edited with
:CocLocalConfig. The recommended settings live at
src/etc/rust_analyzer_settings.json.
Another way is without a plugin, and creating your own logic in your
configuration. To do this you must translate the JSON to Lua yourself. The
translation is 1:1 and fairly straight-forward. It must be put in the
["rust-analyzer"] key of the setup table, which is shown
here.
If you would like to use the build task that is described above, you may either
make your own command in your config, or you can install a plugin such as
overseer.nvim that can read
VSCode's task.json
files,
and follow the same instructions as above.
Emacs
Emacs provides support for rust-analyzer with project-local configuration
through Eglot.
Steps for setting up Eglot with rust-analyzer can be found
here.
Having set up Emacs & Eglot for Rust development in general, you can run
./x setup editor and select emacs, which will prompt you to create
.dir-locals.el with the recommended configuration for Eglot.
The recommended settings live at src/etc/rust_analyzer_eglot.el.
For more information on project-specific Eglot configuration, consult the
manual.
Helix
Helix comes with built-in LSP and rust-analyzer support.
It can be configured through languages.toml, as described
here.
You can run ./x setup editor and select helix, which will prompt you to
create languages.toml with the recommended configuration for Helix. The
recommended settings live at src/etc/rust_analyzer_helix.toml.
Check, check, and check again
When doing simple refactoring, it can be useful to run ./x check
continuously. If you set up rust-analyzer as described above, this will be
done for you every time you save a file. Here you are just checking that the
compiler can build, but often that is all you need (e.g., when renaming a
method). You can then run ./x build when you actually need to run tests.
In fact, it is sometimes useful to put off tests even when you are not 100% sure
the code will work. You can then keep building up refactoring commits and only
run the tests at some later time. You can then use git bisect to track down
precisely which commit caused the problem. A nice side-effect of this style
is that you are left with a fairly fine-grained set of commits at the end, all
of which build and pass tests. This often helps reviewing.
x suggest
The x suggest subcommand suggests (and runs) a subset of the extensive
rust-lang/rust tests based on files you have changed. This is especially
useful for new contributors who have not mastered the arcane x flags yet and
more experienced contributors as a shorthand for reducing mental effort. In all
cases it is useful not to run the full tests (which can take on the order of
tens of minutes) and just run a subset which are relevant to your changes. For
example, running tidy and linkchecker is useful when editing Markdown files,
whereas UI tests are much less likely to be helpful. While x suggest is a
useful tool, it does not guarantee perfect coverage (just as PR CI isn't a
substitute for bors). See the dedicated chapter for
more information and contribution instructions.
Please note that x suggest is in a beta state currently and the tests that it
will suggest are limited.
Configuring rustup to use nightly
Some parts of the bootstrap process uses pinned, nightly versions of tools like
rustfmt. To make things like cargo fmt work correctly in your repo, run
cd <path to rustc repo>
rustup override set nightly
after installing a nightly toolchain with rustup. Don't forget to do this
for all directories you have setup a worktree for. You may need to use the
pinned nightly version from src/stage0, but often the normal nightly channel
will work.
Note see the section on vscode for how to configure it with this real
rustfmt x uses, and the section on rustup for how to setup rustup
toolchain for your bootstrapped compiler
Note This does not allow you to build rustc with cargo directly. You
still have to use x to work on the compiler or standard library, this just
lets you use cargo fmt.
Faster builds with --keep-stage.
Sometimes just checking whether the compiler builds is not enough. A common
example is that you need to add a debug! statement to inspect the value of
some state or better understand the problem. In that case, you don't really need
a full build. By bypassing bootstrap's cache invalidation, you can often get
these builds to complete very fast (e.g., around 30 seconds). The only catch is
this requires a bit of fudging and may produce compilers that don't work (but
that is easily detected and fixed).
The sequence of commands you want is as follows:
- Initial build:
./x build library- As documented previously, this will build a functional stage1 compiler as
part of running all stage0 commands (which include building a
stdcompatible with the stage1 compiler) as well as the first few steps of the "stage 1 actions" up to "stage1 (sysroot stage1) builds std".
- As documented previously, this will build a functional stage1 compiler as
part of running all stage0 commands (which include building a
- Subsequent builds:
./x build library --keep-stage 1- Note that we added the
--keep-stage 1flag here
- Note that we added the
As mentioned, the effect of --keep-stage 1 is that we just assume that the
old standard library can be re-used. If you are editing the compiler, this is
almost always true: you haven't changed the standard library, after all. But
sometimes, it's not true: for example, if you are editing the "metadata" part of
the compiler, which controls how the compiler encodes types and other states
into the rlib files, or if you are editing things that wind up in the metadata
(such as the definition of the MIR).
The TL;DR is that you might get weird behavior from a compile when using
--keep-stage 1 -- for example, strange ICEs
or other panics. In that case, you should simply remove the --keep-stage 1
from the command and rebuild. That ought to fix the problem.
You can also use --keep-stage 1 when running tests. Something like this:
- Initial test run:
./x test tests/ui - Subsequent test run:
./x test tests/ui --keep-stage 1
Using incremental compilation
You can further enable the --incremental flag to save additional time in
subsequent rebuilds:
./x test tests/ui --incremental --test-args issue-1234
If you don't want to include the flag with every command, you can enable it in
the config.toml:
[rust]
incremental = true
Note that incremental compilation will use more disk space than usual. If disk
space is a concern for you, you might want to check the size of the build
directory from time to time.
Fine-tuning optimizations
Setting optimize = false makes the compiler too slow for tests. However, to
improve the test cycle, you can disable optimizations selectively only for the
crates you'll have to rebuild
(source).
For example, when working on rustc_mir_build, the rustc_mir_build and
rustc_driver crates take the most time to incrementally rebuild. You could
therefore set the following in the root Cargo.toml:
[profile.release.package.rustc_mir_build]
opt-level = 0
[profile.release.package.rustc_driver]
opt-level = 0
Working on multiple branches at the same time
Working on multiple branches in parallel can be a little annoying, since building the compiler on one branch will cause the old build and the incremental compilation cache to be overwritten. One solution would be to have multiple clones of the repository, but that would mean storing the Git metadata multiple times, and having to update each clone individually.
Fortunately, Git has a better solution called worktrees. This lets you create multiple "working trees", which all share the same Git database. Moreover, because all of the worktrees share the same object database, if you update a branch (e.g. master) in any of them, you can use the new commits from any of the worktrees. One caveat, though, is that submodules do not get shared. They will still be cloned multiple times.
Given you are inside the root directory for your Rust repository, you can create a "linked working tree" in a new "rust2" directory by running the following command:
git worktree add ../rust2
Creating a new worktree for a new branch based on master looks like:
git worktree add -b my-feature ../rust2 master
You can then use that rust2 folder as a separate workspace for modifying and
building rustc!
Using nix-shell
If you're using nix, you can use the following nix-shell to work on Rust:
{ pkgs ? import <nixpkgs> {} }:
pkgs.mkShell {
name = "rustc";
nativeBuildInputs = with pkgs; [
binutils cmake ninja pkg-config python3 git curl cacert patchelf nix
];
buildInputs = with pkgs; [
openssl glibc.out glibc.static
];
# Avoid creating text files for ICEs.
RUSTC_ICE = "0";
# Provide `libstdc++.so.6` for the self-contained lld.
LD_LIBRARY_PATH = "${with pkgs; lib.makeLibraryPath [
stdenv.cc.cc.lib
]}";
}
Note that when using nix on a not-NixOS distribution, it may be necessary to set
patch-binaries-for-nix = true in config.toml. Bootstrap tries to detect
whether it's running in nix and enable patching automatically, but this
detection can have false negatives.
You can also use your nix shell to manage config.toml:
let
config = pkgs.writeText "rustc-config" ''
# Your config.toml content goes here
''
pkgs.mkShell {
/* ... */
# This environment variable tells bootstrap where our config.toml is.
RUST_BOOTSTRAP_CONFIG = config;
}
Shell Completions
If you use Bash, Fish or PowerShell, you can find automatically-generated shell
completion scripts for x.py in
src/etc/completions.
Zsh support will also be included once issues with
clap_complete have been resolved.
You can use source ./src/etc/completions/x.py.<extension> to load completions
for your shell of choice, or & .\src\etc\completions\x.py.ps1 for PowerShell.
Adding this to your shell's startup script (e.g. .bashrc) will automatically
load this completion.
Build distribution artifacts
You might want to build and package up the compiler for distribution. You’ll want to run this command to do it:
./x dist
Install from source
You might want to prefer installing Rust (and tools configured in your configuration) by building from source. If so, you want to run this command:
./x install
Note: If you are testing out a modification to a compiler, you might
want to build the compiler (with ./x build) then create a toolchain as
discussed in here.
For example, if the toolchain you created is called "foo", you would then
invoke it with rustc +foo ... (where ... represents the rest of the arguments).
Instead of installing Rust (and tools in your config file) globally, you can set DESTDIR
environment variable to change the installation path. If you want to set installation paths
more dynamically, you should prefer install options in your config file to achieve that.
Building documentation
This chapter describes how to build documentation of toolchain components, like the standard library (std) or the compiler (rustc).
-
Document everything
This uses
rustdocfrom the beta toolchain, so will produce (slightly) different output to stage 1 rustdoc, as rustdoc is under active development:./x docIf you want to be sure the documentation looks the same as on CI:
./x doc --stage 1This ensures that (current) rustdoc gets built, then that is used to document the components.
-
Much like running individual tests or building specific components, you can build just the documentation you want:
./x doc src/doc/book ./x doc src/doc/nomicon ./x doc compiler librarySee the nightly docs index page for a full list of books.
-
Document internal rustc items
Compiler documentation is not built by default. To create it by default with
x doc, modifyconfig.toml:[build] compiler-docs = trueNote that when enabled, documentation for internal compiler items will also be built.
NOTE: The documentation for the compiler is found at this link.
Rustdoc overview
rustdoc lives in-tree with the
compiler and standard library. This chapter is about how it works.
For information about Rustdoc's features and how to use them, see
the Rustdoc book.
For more details about how rustdoc works, see the
"Rustdoc internals" chapter.
rustdoc uses rustc internals (and, of course, the standard library), so you
will have to build the compiler and std once before you can build rustdoc.
Rustdoc is implemented entirely within the crate librustdoc. It runs
the compiler up to the point where we have an internal representation of a
crate (HIR) and the ability to run some queries about the types of items. HIR
and queries are discussed in the linked chapters.
librustdoc performs two major steps after that to render a set of
documentation:
- "Clean" the AST into a form that's more suited to creating documentation (and slightly more resistant to churn in the compiler).
- Use this cleaned AST to render a crate's documentation, one page at a time.
Naturally, there's more than just this, and those descriptions simplify out lots of details, but that's the high-level overview.
(Side note: librustdoc is a library crate! The rustdoc binary is created
using the project in src/tools/rustdoc. Note that literally all that
does is call the main() that's in this crate's lib.rs, though.)
Cheat sheet
- Run
./x setup toolsbefore getting started. This will configurexwith nice settings for developing rustdoc and other tools, including downloading a copy of rustc rather than building it. - Use
./x check rustdocto quickly check for compile errors. - Use
./x build library rustdocto make a usable rustdoc you can run on other projects.- Add
library/testto be able to userustdoc --test. - Run
rustup toolchain link stage2 build/host/stage2to add a custom toolchain calledstage2to your rustup environment. After running that,cargo +stage2 docin any directory will build with your locally-compiled rustdoc.
- Add
- Use
./x doc libraryto use this rustdoc to generate the standard library docs.- The completed docs will be available in
build/host/doc(undercore,alloc, andstd). - If you want to copy those docs to a webserver, copy all of
build/host/doc, since that's where the CSS, JS, fonts, and landing page are.
- The completed docs will be available in
- Use
./x test tests/rustdoc*to run the tests using a stage1 rustdoc.- See Rustdoc internals for more information about tests.
Code structure
- All paths in this section are relative to
src/librustdocin the rust-lang/rust repository. - Most of the HTML printing code is in
html/format.rsandhtml/render/mod.rs. It's in a bunch offmt::Displayimplementations and supplementary functions. - The types that got
Displayimpls above are defined inclean/mod.rs, right next to the customCleantrait used to process them out of the rustc HIR. - The bits specific to using rustdoc as a test harness are in
doctest.rs. - The Markdown renderer is loaded up in
html/markdown.rs, including functions for extracting doctests from a given block of Markdown. - The tests on the structure of rustdoc HTML output are located in
tests/rustdoc, where they're handled by the test runner of bootstrap and the supplementary scriptsrc/etc/htmldocck.py.
Tests
- All paths in this section are relative to
testsin the rust-lang/rust repository. - Tests on search engine and index are located in
rustdoc-jsandrustdoc-js-std. The format is specified in the search guide. - Tests on the "UI" of rustdoc (the terminal output it produces when run) are in
rustdoc-ui - Tests on the "GUI" of rustdoc (the HTML, JS, and CSS as rendered in a browser)
are in
rustdoc-gui. These use a NodeJS tool called browser-UI-test that uses puppeteer to run tests in a headless browser and check rendering and interactivity.
Constraints
We try to make rustdoc work reasonably well with JavaScript disabled, and when browsing local files. We support these browsers.
Supporting local files (file:/// URLs) brings some surprising restrictions.
Certain browser features that require secure origins, like localStorage and
Service Workers, don't work reliably. We can still use such features but we
should make sure pages are still usable without them.
Multiple runs, same output directory
Rustdoc can be run multiple times for varying inputs, with its output set to the same directory. That's how cargo produces documentation for dependencies of the current crate. It can also be done manually if a user wants a big documentation bundle with all of the docs they care about.
HTML is generated independently for each crate, but there is some cross-crate information that we update as we add crates to the output directory:
crates<SUFFIX>.jsholds a list of all crates in the output directory.search-index<SUFFIX>.jsholds a list of all searchable items.- For each trait, there is a file under
implementors/.../trait.TraitName.jscontaining a list of implementors of that trait. The implementors may be in different crates than the trait, and the JS file is updated as we discover new ones.
Use cases
There are a few major use cases for rustdoc that you should keep in mind when working on it:
Standard library docs
These are published at https://doc.rust-lang.org/std as part of the Rust release process. Stable releases are also uploaded to specific versioned URLs like https://doc.rust-lang.org/1.57.0/std/. Beta and nightly docs are published to https://doc.rust-lang.org/beta/std/ and https://doc.rust-lang.org/nightly/std/. The docs are uploaded with the promote-release tool and served from S3 with CloudFront.
The standard library docs contain five crates: alloc, core, proc_macro, std, and test.
docs.rs
When crates are published to crates.io, docs.rs automatically builds and publishes their documentation, for instance at https://docs.rs/serde/latest/serde/. It always builds with the current nightly rustdoc, so any changes you land in rustdoc are "insta-stable" in that they will have an immediate public effect on docs.rs. Old documentation is not rebuilt, so you will see some variation in UI when browsing old releases in docs.rs. Crate authors can request rebuilds, which will be run with the latest rustdoc.
Docs.rs performs some transformations on rustdoc's output in order to save
storage and display a navigation bar at the top. In particular, certain static
files, like main.js and rustdoc.css, may be shared across multiple invocations
of the same version of rustdoc. Others, like crates.js and sidebar-items.js, are
different for different invocations. Still others, like fonts, will never
change. These categories are distinguished using the SharedResource enum in
src/librustdoc/html/render/write_shared.rs
Documentation on docs.rs is always generated for a single crate at a time, so the search and sidebar functionality don't include dependencies of the current crate.
Locally generated docs
Crate authors can run cargo doc --open in crates they have checked
out locally to see the docs. This is useful to check that the docs they
are writing are useful and display correctly. It can also be useful for
people to view documentation on crates they aren't authors of, but want to
use. In both cases, people may use --document-private-items Cargo flag to
see private methods, fields, and so on, which are normally not displayed.
By default cargo doc will generate documentation for a crate and all of its
dependencies. That can result in a very large documentation bundle, with a large
(and slow) search corpus. The Cargo flag --no-deps inhibits that behavior and
generates docs for just the crate.
Self-hosted project docs
Some projects like to host their own documentation. For example:
https://docs.serde.rs/. This is easy to do by locally generating docs, and
simply copying them to a web server. Rustdoc's HTML output can be extensively
customized by flags. Users can add a theme, set the default theme, and inject
arbitrary HTML. See rustdoc --help for details.
Adding a new target
These are a set of steps to add support for a new target. There are numerous end states and paths to get there, so not all sections may be relevant to your desired goal.
- Specifying a new LLVM
- Creating a target specification
- Patching crates
- Cross-compiling
- Promoting a target from tier 2 (target) to tier 2 (host)
Specifying a new LLVM
For very new targets, you may need to use a different fork of LLVM
than what is currently shipped with Rust. In that case, navigate to
the src/llvm-project git submodule (you might need to run ./x check at least once so the submodule is updated), check out the
appropriate commit for your fork, then commit that new submodule
reference in the main Rust repository.
An example would be:
cd src/llvm-project
git remote add my-target-llvm some-llvm-repository
git checkout my-target-llvm/my-branch
cd ..
git add llvm-project
git commit -m 'Use my custom LLVM'
Using pre-built LLVM
If you have a local LLVM checkout that is already built, you may be able to configure Rust to treat your build as the system LLVM to avoid redundant builds.
You can tell Rust to use a pre-built version of LLVM using the target section
of config.toml:
[target.x86_64-unknown-linux-gnu]
llvm-config = "/path/to/llvm/llvm-7.0.1/bin/llvm-config"
If you are attempting to use a system LLVM, we have observed the following paths before, though they may be different from your system:
/usr/bin/llvm-config-8/usr/lib/llvm-8/bin/llvm-config
Note that you need to have the LLVM FileCheck tool installed, which is used
for codegen tests. This tool is normally built with LLVM, but if you use your
own preinstalled LLVM, you will need to provide FileCheck in some other way.
On Debian-based systems, you can install the llvm-N-tools package (where N
is the LLVM version number, e.g. llvm-8-tools). Alternately, you can specify
the path to FileCheck with the llvm-filecheck config item in config.toml
or you can disable codegen test with the codegen-tests item in config.toml.
Creating a target specification
You should start with a target JSON file. You can see the specification
for an existing target using --print target-spec-json:
rustc -Z unstable-options --target=wasm32-unknown-unknown --print target-spec-json
Save that JSON to a file and modify it as appropriate for your target.
Adding a target specification
Once you have filled out a JSON specification and been able to compile somewhat successfully, you can copy the specification into the compiler itself.
You will need to add a line to the big table inside of the
supported_targets macro in the rustc_target::spec module. You
will then add a corresponding file for your new target containing a
target function.
Look for existing targets to use as examples.
After adding your target to the rustc_target crate you may want to add
core, std, ... with support for your new target. In that case you will
probably need access to some target_* cfg. Unfortunately when building with
stage0 (the beta compiler), you'll get an error that the target cfg is
unexpected because stage0 doesn't know about the new target specification and
we pass --check-cfg in order to tell it to check.
To fix the errors you will need to manually add the unexpected value to the
different Cargo.toml in library/{std,alloc,core}/Cargo.toml. Here is an
example for adding NEW_TARGET_ARCH as target_arch:
library/std/Cargo.toml:
[lints.rust.unexpected_cfgs]
level = "warn"
check-cfg = [
'cfg(bootstrap)',
- 'cfg(target_arch, values("xtensa"))',
+ # #[cfg(bootstrap)] NEW_TARGET_ARCH
+ 'cfg(target_arch, values("xtensa", "NEW_TARGET_ARCH"))',
To use this target in bootstrap, we need to explicitly add the target triple to the STAGE0_MISSING_TARGETS
list in src/bootstrap/src/core/sanity.rs. This is necessary because the default compiler bootstrap uses does
not recognize the new target we just added. Therefore, it should be added to STAGE0_MISSING_TARGETS so that the
bootstrap is aware that this target is not yet supported by the stage0 compiler.
const STAGE0_MISSING_TARGETS: &[&str] = &[
+ "NEW_TARGET_TRIPLE"
];
Patching crates
You may need to make changes to crates that the compiler depends on,
such as libc or cc. If so, you can use Cargo's
[patch] ability. For example, if you want to use an
unreleased version of libc, you can add it to the top-level
Cargo.toml file:
diff --git a/Cargo.toml b/Cargo.toml
index 1e83f05e0ca..4d0172071c1 100644
--- a/Cargo.toml
+++ b/Cargo.toml
@@ -113,6 +113,8 @@ cargo-util = { path = "src/tools/cargo/crates/cargo-util" }
[patch.crates-io]
+libc = { git = "https://github.com/rust-lang/libc", rev = "0bf7ce340699dcbacabdf5f16a242d2219a49ee0" }
# See comments in `src/tools/rustc-workspace-hack/README.md` for what's going on
# here
rustc-workspace-hack = { path = 'src/tools/rustc-workspace-hack' }
After this, run cargo update -p libc to update the lockfiles.
Beware that if you patch to a local path dependency, this will enable
warnings for that dependency. Some dependencies are not warning-free, and due
to the deny-warnings setting in config.toml, the build may suddenly start
to fail.
To work around warnings, you may want to:
- Modify the dependency to remove the warnings
- Or for local development purposes, suppress the warnings by setting deny-warnings = false in config.toml.
# config.toml
[rust]
deny-warnings = false
Cross-compiling
Once you have a target specification in JSON and in the code, you can
cross-compile rustc:
DESTDIR=/path/to/install/in \
./x install -i --stage 1 --host aarch64-apple-darwin.json --target aarch64-apple-darwin \
compiler/rustc library/std
If your target specification is already available in the bootstrap compiler, you can use it instead of the JSON file for both arguments.
Promoting a target from tier 2 (target) to tier 2 (host)
There are two levels of tier 2 targets:
a) Targets that are only cross-compiled (rustup target add)
b) Targets that have a native toolchain (rustup toolchain install)
For an example of promoting a target from cross-compiled to native, see #75914.
Optimized build of the compiler
There are multiple additional build configuration options and techniques that can be used to compile a
build of rustc that is as optimized as possible (for example when building rustc for a Linux
distribution). The status of these configuration options for various Rust targets is tracked here.
This page describes how you can use these approaches when building rustc yourself.
Link-time optimization
Link-time optimization is a powerful compiler technique that can increase program performance. To
enable (Thin-)LTO when building rustc, set the rust.lto config option to "thin"
in config.toml:
[rust]
lto = "thin"
Note that LTO for
rustcis currently supported and tested only for thex86_64-unknown-linux-gnutarget. Other targets may work, but no guarantees are provided. Notably, LTO-optimizedrustccurrently produces miscompilations on Windows.
Enabling LTO on Linux has produced speed-ups by up to 10%.
Memory allocator
Using a different memory allocator for rustc can provide significant performance benefits. If you
want to enable the jemalloc allocator, you can set the rust.jemalloc option to true
in config.toml:
[rust]
jemalloc = true
Note that this option is currently only supported for Linux and macOS targets.
Codegen units
Reducing the amount of codegen units per rustc crate can produce a faster build of the compiler.
You can modify the number of codegen units for rustc and libstd in config.toml with the
following options:
[rust]
codegen-units = 1
codegen-units-std = 1
Instruction set
By default, rustc is compiled for a generic (and conservative) instruction set architecture
(depending on the selected target), to make it support as many CPUs as possible. If you want to
compile rustc for a specific instruction set architecture, you can set the target_cpu compiler
option in RUSTFLAGS:
RUSTFLAGS="-C target_cpu=x86-64-v3" ./x build ...
If you also want to compile LLVM for a specific instruction set, you can set llvm flags
in config.toml:
[llvm]
cxxflags = "-march=x86-64-v3"
cflags = "-march=x86-64-v3"
Profile-guided optimization
Applying profile-guided optimizations (or more generally, feedback-directed optimizations) can
produce a large increase to rustc performance, by up to 15% (1, 2). However, these techniques
are not simply enabled by a configuration option, but rather they require a complex build workflow
that compiles rustc multiple times and profiles it on selected benchmarks.
There is a tool called opt-dist that is used to optimize rustc with PGO (profile-guided
optimizations) and BOLT (a post-link binary optimizer) for builds distributed to end users. You
can examine the tool, which is located in src/tools/opt-dist, and build a custom PGO build
workflow based on it, or try to use it directly. Note that the tool is currently quite hardcoded to
the way we use it in Rust's continuous integration workflows, and it might require some custom
changes to make it work in a different environment.
To use the tool, you will need to provide some external dependencies:
- A Python3 interpreter (for executing
x.py). - Compiled LLVM toolchain, with the
llvm-profdatabinary. Optionally, if you want to use BOLT, thellvm-boltandmerge-fdatabinaries have to be available in the toolchain.
These dependencies are provided to opt-dist by an implementation of the Environment struct.
It specifies directories where will the PGO/BOLT pipeline take place, and also external dependencies
like Python or LLVM.
Here is an example of how can opt-dist be used locally (outside of CI):
- Build the tool with the following command:
./x build tools/opt-dist - Run the tool with the
localmode and provide necessary parameters:
You can run./build/host/stage0-tools-bin/opt-dist local \ --target-triple <target> \ # select target, e.g. "x86_64-unknown-linux-gnu" --checkout-dir <path> \ # path to rust checkout, e.g. "." --llvm-dir <path> \ # path to built LLVM toolchain, e.g. "/foo/bar/llvm/install" -- python3 x.py dist # pass the actual build command--helpto see further parameters that you can modify.
Note: if you want to run the actual CI pipeline, instead of running
opt-distlocally, you can executeDEPLOY=1 src/ci/docker/run.sh dist-x86_64-linux.
Testing the compiler
The Rust project runs a wide variety of different tests, orchestrated by the
build system (./x test). This section gives a brief overview of the different
testing tools. Subsequent chapters dive into running tests and
adding new tests.
Kinds of tests
There are several kinds of tests to exercise things in the Rust distribution.
Almost all of them are driven by ./x test, with some exceptions noted below.
Compiletest
The main test harness for testing the compiler itself is a tool called compiletest.
compiletest supports running different styles of tests, organized into test
suites. A test mode may provide common presets/behavior for a set of test
suites. compiletest-supported tests are located in the tests directory.
The Compiletest chapter goes into detail on how to use this tool.
Example:
./x test tests/ui
Package tests
The standard library and many of the compiler packages include typical Rust
#[test] unit tests, integration tests, and documentation tests. You can pass a
path to ./x test for almost any package in the library/ or compiler/
directory, and x will essentially run cargo test on that package.
Examples:
| Command | Description |
|---|---|
./x test library/std | Runs tests on std only |
./x test library/core | Runs tests on core only |
./x test compiler/rustc_data_structures | Runs tests on rustc_data_structures |
The standard library relies very heavily on documentation tests to cover its functionality. However, unit tests and integration tests can also be used as needed. Almost all of the compiler packages have doctests disabled.
All standard library and compiler unit tests are placed in separate tests file
(which is enforced in tidy). This ensures that when the test
file is changed, the crate does not need to be recompiled. For example:
#[cfg(test)]
mod tests;
If it wasn't done this way, and you were working on something like core, that
would require recompiling the entire standard library, and the entirety of
rustc.
./x test includes some CLI options for controlling the behavior with these
package tests:
--doc— Only runs documentation tests in the package.--no-doc— Run all tests except documentation tests.
Tidy
Tidy is a custom tool used for validating source code style and formatting conventions, such as rejecting long lines. There is more information in the section on coding conventions.
Examples:
./x test tidy
Formatting
Rustfmt is integrated with the build system to enforce uniform style across the compiler. The formatting check is automatically run by the Tidy tool mentioned above.
Examples:
| Command | Description |
|---|---|
./x fmt --check | Checks formatting and exits with an error if formatting is needed. |
./x fmt | Runs rustfmt across the entire codebase. |
./x test tidy --bless | First runs rustfmt to format the codebase, then runs tidy checks. |
Book documentation tests
All of the books that are published have their own tests, primarily for
validating that the Rust code examples pass. Under the hood, these are
essentially using rustdoc --test on the markdown files. The tests can be run
by passing a path to a book to ./x test.
Example:
./x test src/doc/book
Documentation link checker
Links across all documentation is validated with a link checker tool.
Example:
./x test src/tools/linkchecker
Example:
./x test linkchecker
This requires building all of the documentation, which might take a while.
Dist check
distcheck verifies that the source distribution tarball created by the build
system will unpack, build, and run all tests.
Example:
./x test distcheck
Tool tests
Packages that are included with Rust have all of their tests run as well. This includes things such as cargo, clippy, rustfmt, miri, bootstrap (testing the Rust build system itself), etc.
Most of the tools are located in the src/tools directory. To run the tool's
tests, just pass its path to ./x test.
Example:
./x test src/tools/cargo
Usually these tools involve running cargo test within the tool's directory.
If you want to run only a specified set of tests, append --test-args FILTER_NAME to the command.
Example:
./x test src/tools/miri --test-args padding
In CI, some tools are allowed to fail. Failures send notifications to the corresponding teams, and is tracked on the toolstate website. More information can be found in the toolstate documentation.
Ecosystem testing
Rust tests integration with real-world code to catch regressions and make informed decisions about the evolution of the language. There are several kinds of ecosystem tests, including Crater. See the Ecosystem testing chapter for more details.
Performance testing
A separate infrastructure is used for testing and tracking performance of the compiler. See the Performance testing chapter for more details.
Further reading
The following blog posts may also be of interest:
- brson's classic "How Rust is tested"
Running tests
- Running a subset of the test suites
- Run unit tests on the compiler/library
- Running an individual test
- Passing arguments to
rustcwhen running tests - Editing and updating the reference files
- Configuring test running
- Passing
--pass $mode - Running tests with different "compare modes"
- Running tests manually
- Running
run-maketests - Running tests on a remote machine
- Testing on emulators
- Running rustc_codegen_gcc tests
You can run the entire test collection using x. But note that running the
entire test collection is almost never what you want to do during local
development because it takes a really long time. For local development, see the
subsection after on how to run a subset of tests.
You usually only want to run a subset of the test suites (or even a smaller set of tests than that) which you expect will exercise your changes. PR CI exercises a subset of test collections, and merge queue CI will exercise all of the test collection.
./x test
The test results are cached and previously successful tests are ignored during
testing. The stdout/stderr contents as well as a timestamp file for every test
can be found under build/<target-triple>/test/ for the given
<target-triple>. To force-rerun a test (e.g. in case the test runner fails to
notice a change) you can use the --force-rerun CLI option.
Note on requirements of external dependencies
Some test suites may require external dependecies. This is especially true of debuginfo tests. Some debuginfo tests require a Python-enabled gdb. You can test if your gdb install supports Python by using the
pythoncommand from within gdb. Once invoked you can type some Python code (e.g.print("hi")) followed by return and thenCTRL+Dto execute it. If you are building gdb from source, you will need to configure with--with-python=<path-to-python-binary>.
Running a subset of the test suites
When working on a specific PR, you will usually want to run a smaller set of
tests. For example, a good "smoke test" that can be used after modifying rustc
to see if things are generally working correctly would be to exercise the ui
test suite (tests/ui):
./x test tests/ui
This will run the ui test suite. Of course, the choice of test suites is
somewhat arbitrary, and may not suit the task you are doing. For example, if you
are hacking on debuginfo, you may be better off with the debuginfo test suite:
./x test tests/debuginfo
If you only need to test a specific subdirectory of tests for any given test
suite, you can pass that directory as a filter to ./x test:
./x test tests/ui/const-generics
Note for MSYS2
On MSYS2 the paths seem to be strange and
./x testneither recognizestests/ui/const-genericsnortests\ui\const-generics. In that case, you can workaround it by using e.g../x test ui --test-args="tests/ui/const-generics".
Likewise, you can test a single file by passing its path:
./x test tests/ui/const-generics/const-test.rs
x doesn't support running a single tool test by passing its path yet. You'll
have to use the --test-args argument as describled
below.
./x test src/tools/miri --test-args tests/fail/uninit/padding-enum.rs
Run only the tidy script
./x test tidy
Run tests on the standard library
./x test --stage 0 library/std
Note that this only runs tests on std; if you want to test core or other
crates, you have to specify those explicitly.
Run the tidy script and tests on the standard library
./x test --stage 0 tidy library/std
Run tests on the standard library using a stage 1 compiler
./x test --stage 1 library/std
By listing which test suites you want to run you avoid having to run tests for components you did not change at all.
Run all tests using a stage 2 compiler
./x test --stage 2
Run unit tests on the compiler/library
You may want to run unit tests on a specific file with following:
./x test compiler/rustc_data_structures/src/thin_vec/tests.rs
But unfortunately, it's impossible. You should invoke the following instead:
./x test compiler/rustc_data_structures/ --test-args thin_vec
Running an individual test
Another common thing that people want to do is to run an individual test,
often the test they are trying to fix. As mentioned earlier, you may pass the
full file path to achieve this, or alternatively one may invoke x with the
--test-args option:
./x test tests/ui --test-args issue-1234
Under the hood, the test runner invokes the standard Rust test runner (the same
one you get with #[test]), so this command would wind up filtering for tests
that include "issue-1234" in the name. Thus, --test-args is a good way to run
a collection of related tests.
Passing arguments to rustc when running tests
It can sometimes be useful to run some tests with specific compiler arguments,
without using RUSTFLAGS (during development of unstable features, with -Z
flags, for example).
This can be done with ./x test's --compiletest-rustc-args option, to pass
additional arguments to the compiler when building the tests.
Editing and updating the reference files
If you have changed the compiler's output intentionally, or you are making a new
test, you can pass --bless to the test subcommand. E.g. if some tests in
tests/ui are failing, you can run
./x test tests/ui --bless
to automatically adjust the .stderr, .stdout or .fixed files of
all tests. Of course you can also target just specific tests with the
--test-args your_test_name flag, just like when running the tests.
Configuring test running
There are a few options for running tests:
config.tomlhas therust.verbose-testsoption. Iffalse, each test will print a single dot (the default). Iftrue, the name of every test will be printed. This is equivalent to the--quietoption in the Rust test harness- The environment variable
RUST_TEST_THREADScan be set to the number of concurrent threads to use for testing.
Passing --pass $mode
Pass UI tests now have three modes, check-pass, build-pass and run-pass.
When --pass $mode is passed, these tests will be forced to run under the given
$mode unless the directive //@ ignore-pass exists in the test file. For
example, you can run all the tests in tests/ui as check-pass:
./x test tests/ui --pass check
By passing --pass $mode, you can reduce the testing time. For each mode,
please see Controlling pass/fail
expectations.
Running tests with different "compare modes"
UI tests may have different output depending on certain "modes" that the
compiler is in. For example, when using the Polonius mode, a test foo.rs will
first look for expected output in foo.polonius.stderr, falling back to the
usual foo.stderr if not found. The following will run the UI test suite in
Polonius mode:
./x test tests/ui --compare-mode=polonius
See Compare modes for more details.
Running tests manually
Sometimes it's easier and faster to just run the test by hand. Most tests are
just .rs files, so after creating a rustup
toolchain, you
can do something like:
rustc +stage1 tests/ui/issue-1234.rs
This is much faster, but doesn't always work. For example, some tests include directives that specify specific compiler flags, or which rely on other crates, and they may not run the same without those options.
Running run-make tests
Windows
Running the run-make test suite on Windows is a currently bit more involved.
There are numerous prerequisites and environmental requirements:
- Install msys2: https://www.msys2.org/
- Specify
MSYS2_PATH_TYPE=inheritinmsys2.iniin the msys2 installation directory, run the following withMSYS2 MSYS:pacman -Syuupacman -S makepacman -S diffutilspacman -S binutils./x test run-make(./x test tests/run-makedoesn't work)
There is on-going work to not rely on Makefiles in the
run-make test suite. Once this work is completed, you can run the entire
run-make test suite on native Windows inside cmd or PowerShell without
needing to install and use MSYS2. As of Oct 2024, it is
already possible to run the vast majority of the run-make test suite outside
of MSYS2, but there will be failures for the tests that still use Makefiles
due to not finding make.
Running tests on a remote machine
Tests may be run on a remote machine (e.g. to test builds for a different
architecture). This is done using remote-test-client on the build machine to
send test programs to remote-test-server running on the remote machine.
remote-test-server executes the test programs and sends the results back to
the build machine. remote-test-server provides unauthenticated remote code
execution so be careful where it is used.
To do this, first build remote-test-server for the remote machine, e.g. for
RISC-V
./x build src/tools/remote-test-server --target riscv64gc-unknown-linux-gnu
The binary will be created at
./build/host/stage2-tools/$TARGET_ARCH/release/remote-test-server. Copy this
over to the remote machine.
On the remote machine, run the remote-test-server with the --bind 0.0.0.0:12345 flag (and optionally -v for verbose output). Output should look
like this:
$ ./remote-test-server -v --bind 0.0.0.0:12345
starting test server
listening on 0.0.0.0:12345!
Note that binding the server to 0.0.0.0 will allow all hosts able to reach your machine to execute arbitrary code on your machine. We strongly recommend either setting up a firewall to block external access to port 12345, or to use a more restrictive IP address when binding.
You can test if the remote-test-server is working by connecting to it and
sending ping\n. It should reply pong:
$ nc $REMOTE_IP 12345
ping
pong
To run tests using the remote runner, set the TEST_DEVICE_ADDR environment
variable then use x as usual. For example, to run ui tests for a RISC-V
machine with the IP address 1.2.3.4 use
export TEST_DEVICE_ADDR="1.2.3.4:12345"
./x test tests/ui --target riscv64gc-unknown-linux-gnu
If remote-test-server was run with the verbose flag, output on the test
machine may look something like
[...]
run "/tmp/work/test1007/a"
run "/tmp/work/test1008/a"
run "/tmp/work/test1009/a"
run "/tmp/work/test1010/a"
run "/tmp/work/test1011/a"
run "/tmp/work/test1012/a"
run "/tmp/work/test1013/a"
run "/tmp/work/test1014/a"
run "/tmp/work/test1015/a"
run "/tmp/work/test1016/a"
run "/tmp/work/test1017/a"
run "/tmp/work/test1018/a"
[...]
Tests are built on the machine running x not on the remote machine. Tests
which fail to build unexpectedly (or ui tests producing incorrect build
output) may fail without ever running on the remote machine.
Testing on emulators
Some platforms are tested via an emulator for architectures that aren't readily available. For architectures where the standard library is well supported and the host operating system supports TCP/IP networking, see the above instructions for testing on a remote machine (in this case the remote machine is emulated).
There is also a set of tools for orchestrating running the tests within the
emulator. Platforms such as arm-android and arm-unknown-linux-gnueabihf are
set up to automatically run the tests under emulation on GitHub Actions. The
following will take a look at how a target's tests are run under emulation.
The Docker image for armhf-gnu includes QEMU to emulate the ARM CPU
architecture. Included in the Rust tree are the tools remote-test-client and
remote-test-server which are programs for sending test programs and libraries
to the emulator, and running the tests within the emulator, and reading the
results. The Docker image is set up to launch remote-test-server and the
build tools use remote-test-client to communicate with the server to
coordinate running tests (see src/bootstrap/src/core/build_steps/test.rs).
TODO
- Is there any support for using an iOS emulator?
- It's also unclear to me how the wasm or asm.js tests are run.
Running rustc_codegen_gcc tests
First thing to know is that it only supports linux x86_64 at the moment. We will extend its support later on.
You need to update codegen-backends value in your config.toml file in the
[rust] section and add "gcc" in the array:
codegen-backends = ["llvm", "gcc"]
Then you need to install libgccjit 12. For example with apt:
$ apt install libgccjit-12-dev
Now you can run the following command:
$ ./x test compiler/rustc_codegen_gcc/
If it cannot find the .so library (if you installed it with apt for example), you
need to pass the library file path with LIBRARY_PATH:
$ LIBRARY_PATH=/usr/lib/gcc/x86_64-linux-gnu/12/ ./x test compiler/rustc_codegen_gcc/
If you encounter bugs or problems, don't hesitate to open issues on the
rustc_codegen_gcc
repository.
Testing with Docker
The Rust tree includes Docker image definitions for the platforms used on
GitHub Actions in src/ci/docker.
The script src/ci/docker/run.sh is used to build the Docker image, run it,
build Rust within the image, and run the tests.
You can run these images on your local development machine. This can be
helpful to test environments different from your local system. First you will
need to install Docker on a Linux, Windows, or macOS system (typically Linux
will be much faster than Windows or macOS because the latter use virtual
machines to emulate a Linux environment). To enter interactive mode which will
start a bash shell in the container, run src/ci/docker/run.sh --dev <IMAGE>
where <IMAGE> is one of the directory names in src/ci/docker (for example
x86_64-gnu is a fairly standard Ubuntu environment).
The docker script will mount your local Rust source tree in read-only mode,
and an obj directory in read-write mode. All of the compiler artifacts will
be stored in the obj directory. The shell will start out in the obj
directory. From there, you can run ../src/ci/run.sh which will run the build
as defined by the image.
Alternatively, you can run individual commands to do specific tasks. For
example, you can run ../x test tests/ui to just run UI tests.
Note that there is some configuration in the src/ci/run.sh script that you
may need to recreate. Particularly, set submodules = false in your
config.toml so that it doesn't attempt to modify the read-only directory.
Some additional notes about using the Docker images:
- Some of the std tests require IPv6 support. Docker on Linux seems to have it
disabled by default. Run the commands in
enable-docker-ipv6.shto enable IPv6 before creating the container. This only needs to be done once. - The container will be deleted automatically when you exit the shell, however
the build artifacts persist in the
objdirectory. If you are switching between different Docker images, the artifacts from previous environments stored in theobjdirectory may confuse the build system. Sometimes you will need to delete parts or all of theobjdirectory before building inside the container. - The container is bare-bones, with only a minimal set of packages. You may
want to install some things like
apt install less vim. - You can open multiple shells in the container. First you need the container
name (a short hash), which is displayed in the shell prompt, or you can run
docker container lsoutside of the container to list the available containers. With the container name, rundocker exec -it <CONTAINER> /bin/bashwhere<CONTAINER>is the container name like4ba195e95cef.
Testing with CI
The primary goal of our CI system is to ensure that the master branch of
rust-lang/rust is always in a valid state and passes our test suite.
From a high-level point of view, when you open a pull request at
rust-lang/rust, the following will happen:
- A small subset of tests and checks are run after each push to the PR. This should help catching common errors.
- When the PR is approved, the bors bot enqueues the PR into a merge queue.
- Once the PR gets to the front of the queue, bors will create a merge commit and run the full test suite on it. The merge commit either contains only one specific PR or it can be a "rollup" which combines multiple PRs together, to save CI costs.
- Once the whole test suite finishes, two things can happen. Either CI fails
with an error that needs to be addressed by the developer, or CI succeeds and
the merge commit is then pushed to the
masterbranch.
If you want to modify what gets executed on CI, see Modifying CI jobs.
CI workflow
Our CI is primarily executed on GitHub Actions, with a single workflow defined
in .github/workflows/ci.yml, which contains a bunch of steps that are
unified for all CI jobs that we execute. When a commit is pushed to a
corresponding branch or a PR, the workflow executes the
calculate-job-matrix.py script, which dynamically generates the specific CI
jobs that should be executed. This script uses the jobs.yml file as an
input, which contains a declarative configuration of all our CI jobs.
Almost all build steps shell out to separate scripts. This keeps the CI fairly platform independent (i.e., we are not overly reliant on GitHub Actions). GitHub Actions is only relied on for bootstrapping the CI process and for orchestrating the scripts that drive the process.
In essence, all CI jobs run ./x test, ./x dist or some other command with
different configurations, across various operating systems, targets and
platforms. There are two broad categories of jobs that are executed, dist and
non-dist jobs.
- Dist jobs build a full release of the compiler for a specific platform,
including all the tools we ship through rustup; Those builds are then uploaded
to the
rust-lang-ci2S3 bucket and are available to be locally installed with the rustup-toolchain-install-master tool. The same builds are also used for actual releases: our release process basically consists of copying those artifacts fromrust-lang-ci2to the production endpoint and signing them. - Non-dist jobs run our full test suite on the platform, and the test suite of all the tools we ship through rustup; The amount of stuff we test depends on the platform (for example some tests are run only on Tier 1 platforms), and some quicker platforms are grouped together on the same builder to avoid wasting CI resources.
Based on an input event (usually a push to a branch), we execute one of three kinds of builds (sets of jobs).
- PR builds
- Auto builds
- Try builds
Pull Request builds
After each push to a pull request, a set of pr jobs are executed. Currently,
these execute the x86_64-gnu-llvm-X, x86_64-gnu-tools, mingw-check and
mingw-check-tidy jobs, all running on Linux. These execute a relatively short
(~30 minutes) and lightweight test suite that should catch common issues. More
specifically, they run a set of lints, they try to perform a cross-compile check
build to Windows mingw (without producing any artifacts) and they test the
compiler using a system version of LLVM. Unfortunately, it would take too many
resources to run the full test suite for each commit on every PR.
Note on doc comments
Note that PR CI as of Oct 2024 by default does not try to run
./x doc xxx. This means that if you have any broken intradoc links that would lead to./x doc xxxfailing, it will happen very late into the full merge queue CI pipeline.Thus, it is a good idea to run
./x doc xxxlocally for any doc comment changes to help catch these early.
PR jobs are defined in the pr section of jobs.yml. They run under the
rust-lang/rust repository, and their results can be observed directly on the
PR, in the "CI checks" section at the bottom of the PR page.
Auto builds
Before a commit can be merged into the master branch, it needs to pass our
complete test suite. We call this an auto build. This build runs tens of CI
jobs that exercise various tests across operating systems and targets. The full
test suite is quite slow; it can take two hours or more until all the auto CI
jobs finish.
Most platforms only run the build steps, some run a restricted set of tests, only a subset run the full suite of tests (see Rust's platform tiers).
Auto jobs are defined in the auto section of jobs.yml. They are executed
on the auto branch under the rust-lang-ci/rust repository1 and
their results can be seen here,
although usually you will be notified of the result by a comment made by bors on
the corresponding PR.
At any given time, at most a single auto build is being executed. Find out
more here.
The auto and try jobs run under the rust-lang-ci fork for
historical reasons. This may change in the future.
Try builds
Sometimes we want to run a subset of the test suite on CI for a given PR, or
build a set of compiler artifacts from that PR, without attempting to merge it.
We call this a "try build". A try build is started after a user with the proper
permissions posts a PR comment with the @bors try command.
There are several use-cases for try builds:
- Run a set of performance benchmarks using our rustc-perf benchmark suite.
For this, a working compiler build is needed, which can be generated with a
try build that runs the dist-x86_64-linux CI job, which builds an optimized
version of the compiler on Linux (this job is currently executed by default
when you start a try build). To create a try build and schedule it for a
performance benchmark, you can use the
@bors try @rust-timer queuecommand combination. - Check the impact of the PR across the Rust ecosystem, using a crater run. Again, a working compiler build is needed for this, which can be produced by the dist-x86_64-linux CI job.
- Run a specific CI job (e.g. Windows tests) on a PR, to quickly test if it
passes the test suite executed by that job. You can select which CI jobs will
be executed in the try build by adding up to 10 lines containing
try-job: <name of job>to the PR description. All such specified jobs will be executed in the try build once the@bors trycommand is used on the PR. If no try jobs are specified in this way, the jobs defined in thetrysection ofjobs.ymlwill be executed by default.
Using
try-jobPR description directives
Identify which set of try-jobs (max 10) you would like to exercise. You can find the name of the CI jobs in
jobs.yml.Amend PR description to include (usually at the end of the PR description) e.g.
This PR fixes #123456. try-job: x86_64-msvc try-job: test-variousEach
try-jobdirective must be on its own line.Run the prescribed try jobs with
@bors try. As aforementioned, this requires the user to either (1) havetrypermissions or (2) be delegated withtrypermissions by@bors delegateby someone who hastrypermissions.Note that this is usually easier to do than manually edit
jobs.yml. However, it can be less flexible because you cannot adjust the set of tests that are exercised this way.
Try jobs are defined in the try section of jobs.yml. They are executed on
the try branch under the rust-lang-ci/rust repository1 and
their results can be seen here,
although usually you will be notified of the result by a comment made by bors on
the corresponding PR.
Multiple try builds can execute concurrently across different PRs.
Modifying CI jobs
If you want to modify what gets executed on our CI, you can simply modify the
pr, auto or try sections of the jobs.yml file.
You can also modify what gets executed temporarily, for example to test a particular platform or configuration that is challenging to test locally (for example, if a Windows build fails, but you don't have access to a Windows machine). Don't hesitate to use CI resources in such situations to try out a fix!
You can perform an arbitrary CI job in two ways:
- Use the try build functionality, and specify the CI jobs that you want to be executed in try builds in your PR description.
- Modify the
prsection ofjobs.ymlto specify which CI jobs should be executed after each push to your PR. This might be faster than repeatedly starting try builds.
To modify the jobs executed after each push to a PR, you can simply copy one of
the job definitions from the auto section to the pr section. For example,
the x86_64-msvc job is responsible for running the 64-bit MSVC tests. You can
copy it to the pr section to cause it to be executed after a commit is pushed
to your PR, like this:
pr:
...
- image: x86_64-gnu-tools
<<: *job-linux-16c
# this item was copied from the `auto` section
# vvvvvvvvvvvvvvvvvv
- image: x86_64-msvc
env:
RUST_CONFIGURE_ARGS: --build=x86_64-pc-windows-msvc --enable-profiler
SCRIPT: make ci-msvc
<<: *job-windows-8c
Then you can commit the file and push it to your PR branch on GitHub. GitHub Actions should then execute this CI job after each push to your PR.
After you have finished your experiments, don't forget to remove any changes
you have made to jobs.yml, if they were supposed to be temporary!
A good practice is to prefix [WIP] in PR title while still running try jobs
and [DO NOT MERGE] in the commit that modifies the CI jobs for testing
purposes.
Although you are welcome to use CI, just be conscious that this is a shared resource with limited concurrency. Try not to enable too many jobs at once (one or two should be sufficient in most cases).
Merging PRs serially with bors
CI services usually test the last commit of a branch merged with the last commit
in master, and while that’s great to check if the feature works in isolation,
it doesn’t provide any guarantee the code is going to work once it’s merged.
Breakages like these usually happen when another, incompatible PR is merged
after the build happened.
To ensure a master branch that works all the time, we forbid manual merges.
Instead, all PRs have to be approved through our bot, bors (the software
behind it is called homu). All the approved PRs are put in a merge queue
(sorted by priority and creation date) and are automatically tested one at the
time. If all the builders are green, the PR is merged, otherwise the failure is
recorded and the PR will have to be re-approved again.
Bors doesn’t interact with CI services directly, but it works by pushing the
merge commit it wants to test to specific branches (like auto or try), which
are configured to execute CI checks. Bors then detects the outcome of the build
by listening for either Commit Statuses or Check Runs. Since the merge commit is
based on the latest master and only one can be tested at the same time, when
the results are green, master is fast-forwarded to that merge commit.
Unfortunately testing a single PR at the time, combined with our long CI (~2 hours for a full run), means we can’t merge too many PRs in a single day, and a single failure greatly impacts our throughput for the day. The maximum number of PRs we can merge in a day is around ~10.
The large CI run times and requirement for a large builder pool is largely due
to the fact that full release artifacts are built in the dist- builders. This
is worth it because these release artifacts:
- Allow perf testing even at a later date.
- Allow bisection when bugs are discovered later.
- Ensure release quality since if we're always releasing, we can catch problems early.
Rollups
Some PRs don’t need the full test suite to be executed: trivial changes like typo fixes or README improvements shouldn’t break the build, and testing every single one of them for 2+ hours is a big waste of time. To solve this, we regularly create a "rollup", a PR where we merge several pending trivial PRs so they can be tested together. Rollups are created manually by a team member using the "create a rollup" button on the merge queue. The team member uses their judgment to decide if a PR is risky or not, and are the best tool we have at the moment to keep the queue in a manageable state.
Docker
All CI jobs, except those on macOS and Windows, are executed inside that platform’s custom Docker container. This has a lot of advantages for us:
- The build environment is consistent regardless of the changes of the underlying image (switching from the trusty image to xenial was painless for us).
- We can use ancient build environments to ensure maximum binary compatibility, for example using older CentOS releases on our Linux builders.
- We can avoid reinstalling tools (like QEMU or the Android emulator) every time thanks to Docker image caching.
- Users can run the same tests in the same environment locally by just running
src/ci/docker/run.sh image-name, which is awesome to debug failures. Note that there are only linux docker images available locally due to licensing and other restrictions.
The docker images prefixed with dist- are used for building artifacts while
those without that prefix run tests and checks.
We also run tests for less common architectures (mainly Tier 2 and Tier 3 platforms) in CI. Since those platforms are not x86 we either run everything inside QEMU or just cross-compile if we don’t want to run the tests for that platform.
These builders are running on a special pool of builders set up and maintained for us by GitHub.
Caching
Our CI workflow uses various caching mechanisms, mainly for two things:
Docker images caching
The Docker images we use to run most of the Linux-based builders take a long time to fully build. To speed up the build, we cache it using Docker registry caching, with the intermediate artifacts being stored on ghcr.io. We also push the built Docker images to ghcr, so that they can be reused by other tools (rustup) or by developers running the Docker build locally (to speed up their build).
Since we test multiple, diverged branches (master, beta and stable), we
can’t rely on a single cache for the images, otherwise builds on a branch would
override the cache for the others. Instead, we store the images under different
tags, identifying them with a custom hash made from the contents of all the
Dockerfiles and related scripts.
LLVM caching with sccache
We build some C/C++ stuff in various CI jobs, and we rely on sccache to cache
the intermediate LLVM artifacts. Sccache is a distributed ccache developed by
Mozilla, which can use an object storage bucket as the storage backend. In our
case, the artefacts are uploaded to an S3 bucket that we control
(rust-lang-ci-sccache2).
Custom tooling around CI
During the years we developed some custom tooling to improve our CI experience.
Rust Log Analyzer to show the error message in PRs
The build logs for rust-lang/rust are huge, and it’s not practical to find
what caused the build to fail by looking at the logs. To improve the developers’
experience we developed a bot called Rust Log Analyzer (RLA) that
receives the build logs on failure and extracts the error message automatically,
posting it on the PR.
The bot is not hardcoded to look for error strings, but was trained with a bunch of build failures to recognize which lines are common between builds and which are not. While the generated snippets can be weird sometimes, the bot is pretty good at identifying the relevant lines even if it’s an error we've never seen before.
Toolstate to support allowed failures
The rust-lang/rust repo doesn’t only test the compiler on its CI, but also a
variety of tools and documentation. Some documentation is pulled in via git
submodules. If we blocked merging rustc PRs on the documentation being fixed, we
would be stuck in a chicken-and-egg problem, because the documentation's CI
would not pass since updating it would need the not-yet-merged version of rustc
to test against (and we usually require CI to be passing).
To avoid the problem, submodules are allowed to fail, and their status is recorded in rust-toolstate. When a submodule breaks, a bot automatically pings the maintainers so they know about the breakage, and it records the failure on the toolstate repository. The release process will then ignore broken tools on nightly, removing them from the shipped nightlies.
While tool failures are allowed most of the time, they’re automatically forbidden a week before a release: we don’t care if tools are broken on nightly but they must work on beta and stable, so they also need to work on nightly a few days before we promote nightly to beta.
More information is available in the toolstate documentation.
Adding new tests
In general, we expect every PR that fixes a bug in rustc to come accompanied by a regression test of some kind. This test should fail in master but pass after the PR. These tests are really useful for preventing us from repeating the mistakes of the past.
The first thing to decide is which kind of test to add. This will depend on the nature of the change and what you want to exercise. Here are some rough guidelines:
- The majority of compiler tests are done with compiletest.
- Changes to the standard library are usually tested within the standard library
itself.
- The majority of standard library tests are written as doctests, which illustrate and exercise typical API behavior.
- Additional unit tests should go in
library/${crate}/tests(where${crate}is usuallycore,alloc, orstd).
- If the code is part of an isolated system, and you are not testing compiler output, consider using a unit or integration test.
- Need to run rustdoc? Prefer a
rustdocorrustdoc-uitest. Occasionally you'll needrustdoc-jsas well. - Other compiletest test suites are generally used for special purposes:
- Need to run gdb or lldb? Use the
debuginfotest suite. - Need to inspect LLVM IR or MIR IR? Use the
codegenormir-opttest suites. - Need to inspect the resulting binary in some way? Or if all the other test
suites are too limited for your purposes? Then use
run-make. - Check out the compiletest chapter for more specialized test suites.
- Need to run gdb or lldb? Use the
After deciding on which kind of test to add, see best practices for guidance on how to author tests that are easy to work with that stand the test of time (i.e. if a test fails or need to be modified several years later, how can we make it easier for them?).
UI test walkthrough
The following is a basic guide for creating a UI test, which is one of the most common compiler tests. For this tutorial, we'll be adding a test for an async error message.
Step 1: Add a test file
The first step is to create a Rust source file somewhere in the tests/ui
tree. When creating a test, do your best to find a good location and name (see
Test organization for more). Since naming is the
hardest part of development, everything should be downhill from here!
Let's place our async test at tests/ui/async-await/await-without-async.rs:
// Provide diagnostics when the user writes `await` in a non-`async` function.
//@ edition:2018
async fn foo() {}
fn bar() {
foo().await
}
fn main() {}
A few things to notice about our test:
- The top should start with a short comment that explains what the test is for.
- The
//@ edition:2018comment is called a directive which provides instructions to compiletest on how to build the test. Here we need to set the edition forasyncto work (the default is edition 2015). - Following that is the source of the test. Try to keep it succinct and to the point. This may require some effort if you are trying to minimize an example from a bug report.
- We end this test with an empty
fn mainfunction. This is because the default for UI tests is abincrate-type, and we don't want the "main not found" error in our test. Alternatively, you could add#![crate_type="lib"].
Step 2: Generate the expected output
The next step is to create the expected output snapshots from the compiler. This
can be done with the --bless option:
./x test tests/ui/async-await/await-without-async.rs --bless
This will build the compiler (if it hasn't already been built), compile the
test, and place the output of the compiler in a file called
tests/ui/async-await/await-without-async.stderr.
However, this step will fail! You should see an error message, something like this:
error: /rust/tests/ui/async-await/await-without-async.rs:7: unexpected error: '7:10: 7:16:
awaitis only allowed insideasyncfunctions and blocks E0728'
This is because the stderr contains errors which were not matched by error annotations in the source file.
Step 3: Add error annotations
Every error needs to be annotated with a comment in the source with the text of the error. In this case, we can add the following comment to our test file:
fn bar() {
foo().await
//~^ ERROR `await` is only allowed inside `async` functions and blocks
}
The //~^ squiggle caret comment tells compiletest that the error belongs to
the previous line (more on this in the Error
annotations section).
Save that, and run the test again:
./x test tests/ui/async-await/await-without-async.rs
It should now pass, yay!
Step 4: Review the output
Somewhat hand-in-hand with the previous step, you should inspect the .stderr
file that was created to see if it looks like how you expect. If you are adding
a new diagnostic message, now would be a good time to also consider how readable
the message looks overall, particularly for people new to Rust.
Our example tests/ui/async-await/await-without-async.stderr file should look
like this:
error[E0728]: `await` is only allowed inside `async` functions and blocks
--> $DIR/await-without-async.rs:7:10
|
LL | fn bar() {
| --- this is not `async`
LL | foo().await
| ^^^^^^ only allowed inside `async` functions and blocks
error: aborting due to previous error
For more information about this error, try `rustc --explain E0728`.
You may notice some things look a little different than the regular compiler output.
- The
$DIRremoves the path information which will differ between systems. - The
LLvalues replace the line numbers. That helps avoid small changes in the source from triggering large diffs. See the Normalization section for more.
Around this stage, you may need to iterate over the last few steps a few times to tweak your test, re-bless the test, and re-review the output.
Step 5: Check other tests
Sometimes when adding or changing a diagnostic message, this will affect other tests in the test suite. The final step before posting a PR is to check if you have affected anything else. Running the UI suite is usually a good start:
./x test tests/ui
If other tests start failing, you may need to investigate what has changed and if the new output makes sense.
You may also need to re-bless the output with the --bless flag.
Comment explaining what the test is about
The first comment of a test file should summarize the point of the test, and highlight what is important about it. If there is an issue number associated with the test, include the issue number.
This comment doesn't have to be super extensive. Just something like "Regression test for #18060: match arms were matching in the wrong order." might already be enough.
These comments are very useful to others later on when your test breaks, since they often can highlight what the problem is. They are also useful if for some reason the tests need to be refactored, since they let others know which parts of the test were important. Often a test must be rewritten because it no longer tests what is was meant to test, and then it's useful to know what it was meant to test exactly.
Best practices for writing tests
This chapter describes best practices related to authoring and modifying tests. We want to make sure the tests we author are easy to understand and modify, even several years later, without needing to consult the original author and perform a bunch of git archeology.
It's good practice to review the test that you authored by pretending that you are a different contributor who is looking at the test that failed several years later without much context (this also helps yourself even a few days or months later!). Then ask yourself: how can I make my life and their lives easier?
To help put this into perspective, let's start with an aside on how to write a test that makes the life of another contributor as hard as possible.
Aside: Simple Test Sabotage Field Manual
To make the life of another contributor as hard as possible, one might:
- Name the test after an issue number alone without any other context, e.g.
issue-123456.rs.- Have no comments at all on what the test is trying to exercise, no links to relevant context.
- Include a test that is massive (that can otherwise be minimized) and contains non-essential pieces which distracts from the core thing the test is actually trying to test.
- Include a bunch of unrelated syntax errors and other errors which are not critical to what the test is trying to check.
- Weirdly format the snippets.
- Include a bunch of unused and unrelated features.
- Have e.g.
ignore-windowscompiletest directives but don't offer any explanation as to why they are needed.
Test naming
Make it easy for the reader to immediately understand what the test is
exercising, instead of having to type in the issue number and dig through github
search for what the test is trying to exercise. This has an additional benefit
of making the test possible to be filtered via --test-args as a collection of
related tests.
- Name the test after what it's trying to exercise or prevent regressions of.
- Keep it concise.
- Avoid using issue numbers alone as test names.
- Avoid starting the test name with
issue-xxxxxprefix as it degrades auto-completion.
Avoid using only issue numbers as test names
Prefer including them as links or
#123456in test comments instead. Or if it makes sense to include the issue number, also include brief keywords likemacro-external-span-ice-123956.rs.tests/ui/typeck/issue-123456.rs // bad tests/ui/typeck/issue-123456-asm-macro-external-span-ice.rs // bad (for tab completion) tests/ui/typeck/asm-macro-external-span-ice-123456.rs // good tests/ui/typeck/asm-macro-external-span-ice.rs // good
issue-123456.rsdoes not tell you immediately anything about what the test is actually exercising meaning you need to do additional searching. Including the issue number in the test name as a prefix makes tab completion less useful (if youlsa test directory and get a bunch ofissue-xxxxxprefixes). We can link to the issue in a test comment.//! Check that `asm!` macro including nested macros that come from external //! crates do not lead to a codepoint boundary assertion ICE. //! //! Regression test for <https://github.com/rust-lang/rust/issues/123456>.
Test organization
- For most test suites, try to find a semantically meaningful subdirectory to
home the test.
- E.g. for an implementation of RFC 2093 specifically, we can group a
collection of tests under
tests/ui/rfc-2093-infer-outlives/. For the directory name, include what the RFC is about.
- E.g. for an implementation of RFC 2093 specifically, we can group a
collection of tests under
- For the
run-maketest suite, eachrmake.rsmust be contained within an immediate subdirectory undertests/run-make/. Further nesting is not presently supported. Avoid including issue number in the directory name too, include that info in a comment insidermake.rs.
Test descriptions
To help other contributors understand what the test is about if their changes lead to the test failing, we should make sure a test has sufficient docs about its intent/purpose, links to relevant context (incl. issue numbers or other discussions) and possibly relevant resources (e.g. can be helpful to link to Win32 APIs for specific behavior).
Synopsis of a test with good comments
//! Brief summary of what the test is exercising.
//! Example: Regression test for #123456: make sure coverage attribute don't ICE
//! when applied to non-items.
//!
//! Optional: Remarks on related tests/issues, external APIs/tools, crash
//! mechanism, how it's fixed, FIXMEs, limitations, etc.
//! Example: This test is like `tests/attrs/linkage.rs`, but this test is
//! specifically checking `#[coverage]` which exercises a different code
//! path. The ICE was triggered during attribute validation when we tried
//! to construct a `def_path_str` but only emitted the diagnostic when the
//! platform is windows, causing an ICE on unix.
//!
//! Links to relevant issues and discussions. Examples below:
//! Regression test for <https://github.com/rust-lang/rust/issues/123456>.
//! See also <https://github.com/rust-lang/rust/issues/101345>.
//! See discussion at <https://rust-lang.zulipchat.com/#narrow/stream/131828-t-compiler/topic/123456-example-topic>.
//! See [`clone(2)`].
//!
//! [`clone(2)`]: https://man7.org/linux/man-pages/man2/clone.2.html
//@ ignore-windows
// Reason: (why is this test ignored for windows? why not specifically
// windows-gnu or windows-msvc?)
// Optional: Summary of test cases: What positive cases are checked?
// What negative cases are checked? Any specific quirks?
fn main() {
#[coverage]
//~^ ERROR coverage attribute can only be applied to function items.
let _ = {
// Comment highlighting something that deserves reader attention.
fn foo() {}
};
}
For how much context/explanation is needed, it is up to the author and reviewer's discretion. A good rule of thumb is non-trivial things exercised in the test deserves some explanation to help other contributors to understand. This may include remarks on:
- How an ICE can get triggered if it's quite elaborate.
- Related issues and tests (e.g. this test is like another test but is kept separate because...).
- Platform-specific behaviors.
- Behavior of external dependencies and APIs: syscalls, linkers, tools, environments and the likes.
Test content
- Try to make sure the test is as minimal as possible.
- Minimize non-critical code and especially minimize unnecessary syntax and type errors which can clutter stderr snapshots.
- Where possible, use semantically meaningful names (e.g.
fn bare_coverage_attributes() {}).
Flaky tests
All tests need to strive to be reproducible and reliable. Flaky tests are the worst kind of tests, arguably even worse than not having the test in the first place.
- Flaky tests can fail in completely unrelated PRs which can confuse other contributors and waste their time trying to figure out if test failure is related.
- Flaky tests provide no useful information from its test results other than it's flaky and not reliable: if a test passed but it's flakey, did I just get lucky? if a test is flakey but it failed, was it just spurious?
- Flaky tests degrade confidence in the whole test suite. If a test suite can randomly spuriously fail due to flaky tests, did the whole test suite pass or did I just get lucky/unlucky?
- Flaky tests can randomly fail in full CI, wasting previous full CI resources.
Compiletest directives
See compiletest directives for a listing of directives.
- For
ignore-*/needs-*/only-*directives, unless extremely obvious, provide a brief remark on why the directive is needed. E.g."//@ ignore-wasi (wasi codegens the main symbol differently)".
FileCheck best practices
See LLVM FileCheck guide for details.
- Avoid matching on specific register numbers or basic block numbers unless they're special or critical for the test. Consider using patterns to match them where suitable.
TODO
Pending concrete advice.
Compiletest
- Introduction
- Test suites
- Building auxiliary crates
- Revisions
- Compare modes
Introduction
compiletest is the main test harness of the Rust test suite. It allows test
authors to organize large numbers of tests (the Rust compiler has many
thousands), efficient test execution (parallel execution is supported), and
allows the test author to configure behavior and expected results of both
individual and groups of tests.
Note for macOS users
For macOS users,
SIP(System Integrity Protection) may consistently check the compiled binary by sending network requests to Apple, so you may get a huge performance degradation when running tests.You can resolve it by tweaking the following settings:
Privacy & Security -> Developer Tools -> Add Terminal (Or VsCode, etc.).
compiletest may check test code for compile-time or run-time success/failure.
Tests are typically organized as a Rust source file with annotations in comments
before and/or within the test code. These comments serve to direct compiletest
on if or how to run the test, what behavior to expect, and more. See
directives and the test suite documentation below for more details
on these annotations.
See the Adding new tests and Best practies chapters for a tutorial on creating a new test and advice on writing a good test, and the Running tests chapter on how to run the test suite.
Compiletest itself tries to avoid running tests when the artifacts that are
involved (mainly the compiler) haven't changed. You can use x test --test-args --force-rerun to rerun a test even when none of the inputs have changed.
Test suites
All of the tests are in the tests directory. The tests are organized into
"suites", with each suite in a separate subdirectory. Each test suite behaves a
little differently, with different compiler behavior and different checks for
correctness. For example, the tests/incremental directory contains tests for
incremental compilation. The various suites are defined in
src/tools/compiletest/src/common.rs in the pub enum Mode declaration.
The following test suites are available, with links for more information:
Compiler-specific test suites
| Test suite | Purpose |
|---|---|
ui | Check the stdout/stderr snapshots from the compilation and/or running the resulting executable |
ui-fulldeps | ui tests which require a linkable build of rustc (such as using extern crate rustc_span; or used as a plugin) |
pretty | Check pretty printing |
incremental | Check incremental compilation behavior |
debuginfo | Check debuginfo generation running debuggers |
codegen | Check code generation |
codegen-units | Check codegen unit partitioning |
assembly | Check assembly output |
mir-opt | Check MIR generation and optimizations |
coverage | Check coverage instrumentation |
coverage-run-rustdoc | coverage tests that also run instrumented doctests |
General purpose test suite
run-make are general purpose tests using Rust programs (or
Makefiles (legacy)).
Rustdoc test suites
See Rustdoc tests for more details.
| Test suite | Purpose |
|---|---|
rustdoc | Check rustdoc generated files contain the expected documentation |
rustdoc-gui | Check rustdoc's GUI using a web browser |
rustdoc-js | Check rustdoc search is working as expected |
rustdoc-js-std | Check rustdoc search is working as expected specifically on the std docs |
rustdoc-json | Check JSON output of rustdoc |
rustdoc-ui | Check terminal output of rustdoc |
Pretty-printer tests
The tests in tests/pretty exercise the "pretty-printing" functionality of
rustc. The -Z unpretty CLI option for rustc causes it to translate the
input source into various different formats, such as the Rust source after macro
expansion.
The pretty-printer tests have several directives described below. These commands can significantly change the behavior of the test, but the default behavior without any commands is to:
- Run
rustc -Zunpretty=normalon the source file. - Run
rustc -Zunpretty=normalon the output of the previous step. - The output of the previous two steps should be the same.
- Run
rustc -Zno-codegenon the output to make sure that it can type check (this is similar to runningcargo check).
If any of the commands above fail, then the test fails.
The directives for pretty-printing tests are:
-
pretty-modespecifies the mode pretty-print tests should run in (that is, the argument to-Zunpretty). The default isnormalif not specified. -
pretty-compare-onlycauses a pretty test to only compare the pretty-printed output (stopping after step 3 from above). It will not try to compile the expanded output to type check it. This is needed for a pretty-mode that does not expand to valid Rust, or for other situations where the expanded output cannot be compiled. -
pretty-expandedallows a pretty test to also check that the expanded output can be type checked. That is, after the steps above, it does two more steps:- Run
rustc -Zunpretty=expandedon the original source - Run
rustc -Zno-codegenon the expanded output to make sure that it can type check
This is needed because not all code can be compiled after being expanded. Pretty tests should specify this if they can. An example where this cannot be used is if the test includes
println!. That macro expands to reference private internal functions of the standard library that cannot be called directly without thefmt_internalsfeature gate.More history about this may be found in #23616.
- Run
-
pp-exactis used to ensure a pretty-print test results in specific output. If specified without a value, then it means the pretty-print output should match the original source. If specified with a value, as in//@ pp-exact:foo.pp, it will ensure that the pretty-printed output matches the contents of the given file. Otherwise, ifpp-exactis not specified, then the pretty-printed output will be pretty-printed one more time, and the output of the two pretty-printing rounds will be compared to ensure that the pretty-printed output converges to a steady state.
Incremental tests
The tests in tests/incremental exercise incremental compilation. They use
revisions directive to tell compiletest to run the compiler in a
series of steps.
Compiletest starts with an empty directory with the -C incremental flag, and
then runs the compiler for each revision, reusing the incremental results from
previous steps.
The revisions should start with:
rpass— the test should compile and run successfullyrfail— the test should compile successfully, but the executable should fail to runcfail— the test should fail to compile
To make the revisions unique, you should add a suffix like rpass1 and
rpass2.
To simulate changing the source, compiletest also passes a --cfg flag with the
current revision name.
For example, this will run twice, simulating changing a function:
//@ revisions: rpass1 rpass2
#[cfg(rpass1)]
fn foo() {
println!("one");
}
#[cfg(rpass2)]
fn foo() {
println!("two");
}
fn main() { foo(); }
cfail tests support the forbid-output directive to specify that a certain
substring must not appear anywhere in the compiler output. This can be useful to
ensure certain errors do not appear, but this can be fragile as error messages
change over time, and a test may no longer be checking the right thing but will
still pass.
cfail tests support the should-ice directive to specify that a test should
cause an Internal Compiler Error (ICE). This is a highly specialized directive
to check that the incremental cache continues to work after an ICE.
Debuginfo tests
The tests in tests/debuginfo test debuginfo generation. They build a
program, launch a debugger, and issue commands to the debugger. A single test
can work with cdb, gdb, and lldb.
Most tests should have the //@ compile-flags: -g directive or something
similar to generate the appropriate debuginfo.
To set a breakpoint on a line, add a // #break comment on the line.
The debuginfo tests consist of a series of debugger commands along with "check" lines which specify output that is expected from the debugger.
The commands are comments of the form // $DEBUGGER-command:$COMMAND where
$DEBUGGER is the debugger being used and $COMMAND is the debugger command
to execute.
The debugger values can be:
cdbgdbgdbg— GDB without Rust support (versions older than 7.11)gdbr— GDB with Rust supportlldblldbg— LLDB without Rust supportlldbr— LLDB with Rust support (this no longer exists)
The command to check the output are of the form // $DEBUGGER-check:$OUTPUT
where $OUTPUT is the output to expect.
For example, the following will build the test, start the debugger, set a breakpoint, launch the program, inspect a value, and check what the debugger prints:
//@ compile-flags: -g
//@ lldb-command: run
//@ lldb-command: print foo
//@ lldb-check: $0 = 123
fn main() {
let foo = 123;
b(); // #break
}
fn b() {}
The following directives are available to disable a test based on the debugger currently being used:
min-cdb-version: 10.0.18317.1001— ignores the test if the version of cdb is below the given versionmin-gdb-version: 8.2— ignores the test if the version of gdb is below the given versionignore-gdb-version: 9.2— ignores the test if the version of gdb is equal to the given versionignore-gdb-version: 7.11.90 - 8.0.9— ignores the test if the version of gdb is in a range (inclusive)min-lldb-version: 310— ignores the test if the version of lldb is below the given versionrust-lldb— ignores the test if lldb is not contain the Rust plugin. NOTE: The "Rust" version of LLDB doesn't exist anymore, so this will always be ignored. This should probably be removed.
Note on running lldb debuginfo tests locally
If you want to run lldb debuginfo tests locally, then currently on Windows it is required that:
- You have Python 3.10 installed.
- You have
python310.dllavailable in yourPATHenv var. This is not provided by the standard Python installer you obtain frompython.org; you need to add this toPATHmanually.Otherwise the lldb debuginfo tests can produce crashes in mysterious ways.
Codegen tests
The tests in tests/codegen test LLVM code generation. They compile the test
with the --emit=llvm-ir flag to emit LLVM IR. They then run the LLVM
FileCheck tool. The test is annotated with various // CHECK comments to
check the generated code. See the FileCheck documentation for a tutorial and
more information.
See also the assembly tests for a similar set of tests.
If you need to work with #![no_std] cross-compiling tests, consult the
minicore test auxiliary chapter.
Assembly tests
The tests in tests/assembly test LLVM assembly output. They compile the test
with the --emit=asm flag to emit a .s file with the assembly output. They
then run the LLVM FileCheck tool.
Each test should be annotated with the //@ assembly-output: directive with a
value of either emit-asm or ptx-linker to indicate the type of assembly
output.
Then, they should be annotated with various // CHECK comments to check the
assembly output. See the FileCheck documentation for a tutorial and more
information.
See also the codegen tests for a similar set of tests.
If you need to work with #![no_std] cross-compiling tests, consult the
minicore test auxiliary chapter.
Codegen-units tests
The tests in tests/codegen-units test the
monomorphization collector and CGU partitioning.
These tests work by running rustc with a flag to print the result of the
monomorphization collection pass, and then special annotations in the file are
used to compare against that.
Each test should be annotated with the //@ compile-flags:-Zprint-mono-items=VAL directive with the appropriate VAL to
instruct rustc to print the monomorphization information.
Then, the test should be annotated with comments of the form //~ MONO_ITEM name where name is the monomorphized string printed by rustc like fn <u32 as Trait>::foo.
To check for CGU partitioning, a comment of the form //~ MONO_ITEM name @@ cgu
where cgu is a space separated list of the CGU names and the linkage
information in brackets. For example: //~ MONO_ITEM static function::FOO @@ statics[Internal]
Mir-opt tests
The tests in tests/mir-opt check parts of the generated MIR to make sure it
is generated correctly and is doing the expected optimizations. Check out the
MIR Optimizations chapter for more.
Compiletest will build the test with several flags to dump the MIR output and set a baseline for optimizations:
-Copt-level=1-Zdump-mir=all-Zmir-opt-level=4-Zvalidate-mir-Zdump-mir-exclude-pass-number
The test should be annotated with // EMIT_MIR comments that specify files that
will contain the expected MIR output. You can use x test --bless to create the
initial expected files.
There are several forms the EMIT_MIR comment can take:
-
// EMIT_MIR $MIR_PATH.mir— This will check that the given filename matches the exact output from the MIR dump. For example,my_test.main.SimplifyCfg-elaborate-drops.after.mirwill load that file from the test directory, and compare it against the dump from rustc.Checking the "after" file (which is after optimization) is useful if you are interested in the final state after an optimization. Some rare cases may want to use the "before" file for completeness.
-
// EMIT_MIR $MIR_PATH.diff— where$MIR_PATHis the filename of the MIR dump, such asmy_test_name.my_function.EarlyOtherwiseBranch. Compiletest will diff the.before.mirand.after.mirfiles, and compare the diff output to the expected.difffile from theEMIT_MIRcomment.This is useful if you want to see how an optimization changes the MIR.
-
// EMIT_MIR $MIR_PATH.dot— When using specific flags that dump additional MIR data (e.g.-Z dump-mir-graphvizto produce.dotfiles), this will check that the output matches the given file.
By default 32 bit and 64 bit targets use the same dump files, which can be
problematic in the presence of pointers in constants or other bit width
dependent things. In that case you can add // EMIT_MIR_FOR_EACH_BIT_WIDTH to
your test, causing separate files to be generated for 32bit and 64bit systems.
run-make tests
Note on phasing out
MakefilesWe are planning to migrate all existing Makefile-based
run-maketests to Rust programs. You should not be adding new Makefile-basedrun-maketests.See https://github.com/rust-lang/rust/issues/121876.
The tests in tests/run-make are general-purpose tests using Rust recipes,
which are small programs (rmake.rs) allowing arbitrary Rust code such as
rustc invocations, and is supported by a run_make_support library. Using
Rust recipes provide the ultimate in flexibility.
run-make tests should be used if no other test suites better suit your needs.
Using Rust recipes
Each test should be in a separate directory with a rmake.rs Rust program,
called the recipe. A recipe will be compiled and executed by compiletest with
the run_make_support library linked in.
If you need new utilities or functionality, consider extending and improving the
run_make_support library.
Compiletest directives like //@ only-<target> or //@ ignore-<target> are
supported in rmake.rs, like in UI tests. However, revisions or building
auxiliary via directives are not currently supported.
Two run-make tests are ported over to Rust recipes as examples:
- https://github.com/rust-lang/rust/tree/master/tests/run-make/CURRENT_RUSTC_VERSION
- https://github.com/rust-lang/rust/tree/master/tests/run-make/a-b-a-linker-guard
Quickly check if rmake.rs tests can be compiled
You can quickly check if rmake.rs tests can be compiled without having to
build stage1 rustc by forcing rmake.rs to be compiled with the stage0
compiler:
$ COMPILETEST_FORCE_STAGE0=1 x test --stage 0 tests/run-make/<test-name>
Of course, some tests will not successfully run in this way.
Using Makefiles (legacy)
Each test should be in a separate directory with a Makefile indicating the
commands to run.
There is a tools.mk Makefile which you can include which provides a bunch of
utilities to make it easier to run commands and compare outputs. Take a look at
some of the other tests for some examples on how to get started.
Coverage tests
The tests in tests/coverage are shared by multiple test modes that test
coverage instrumentation in different ways. Running the coverage test suite
will automatically run each test in all of the different coverage modes.
Each mode also has an alias to run the coverage tests in just that mode:
./x test coverage # runs all of tests/coverage in all coverage modes
./x test tests/coverage # same as above
./x test tests/coverage/if.rs # runs the specified test in all coverage modes
./x test coverage-map # runs all of tests/coverage in "coverage-map" mode only
./x test coverage-run # runs all of tests/coverage in "coverage-run" mode only
./x test coverage-map -- tests/coverage/if.rs # runs the specified test in "coverage-map" mode only
If a particular test should not be run in one of the coverage test modes for
some reason, use the //@ ignore-coverage-map or //@ ignore-coverage-run
directives.
coverage-map suite
In coverage-map mode, these tests verify the mappings between source code
regions and coverage counters that are emitted by LLVM. They compile the test
with --emit=llvm-ir, then use a custom tool (src/tools/coverage-dump) to
extract and pretty-print the coverage mappings embedded in the IR. These tests
don't require the profiler runtime, so they run in PR CI jobs and are easy to
run/bless locally.
These coverage map tests can be sensitive to changes in MIR lowering or MIR optimizations, producing mappings that are different but produce identical coverage reports.
As a rule of thumb, any PR that doesn't change coverage-specific code should
feel free to re-bless the coverage-map tests as necessary, without
worrying about the actual changes, as long as the coverage-run tests still
pass.
coverage-run suite
In coverage-run mode, these tests perform an end-to-end test of coverage
reporting. They compile a test program with coverage instrumentation, run that
program to produce raw coverage data, and then use LLVM tools to process that
data into a human-readable code coverage report.
Instrumented binaries need to be linked against the LLVM profiler runtime, so
coverage-run tests are automatically skipped unless the profiler runtime
is enabled in config.toml:
# config.toml
[build]
profiler = true
This also means that they typically don't run in PR CI jobs, though they do run as part of the full set of CI jobs used for merging.
coverage-run-rustdoc suite
The tests in tests/coverage-run-rustdoc also run instrumented doctests and
include them in the coverage report. This avoids having to build rustdoc when
only running the main coverage suite.
Crashes tests
tests/crashes serve as a collection of tests that are expected to cause the
compiler to ICE, panic or crash in some other way, so that accidental fixes are
tracked. This was formally done at https://github.com/rust-lang/glacier but
doing it inside the rust-lang/rust testsuite is more convenient.
It is imperative that a test in the suite causes rustc to ICE, panic or crash crash in some other way. A test will "pass" if rustc exits with an exit status other than 1 or 0.
If you want to see verbose stdout/stderr, you need to set
COMPILETEST_VERBOSE_CRASHES=1, e.g.
$ COMPILETEST_VERBOSE_CRASHES=1 ./x test tests/crashes/999999.rs --stage 1
When adding crashes from https://github.com/rust-lang/rust/issues, the issue
number should be noted in the file name (12345.rs should suffice) and also
inside the file include a //@ known-bug: #4321 directive.
If you happen to fix one of the crashes, please move it to a fitting
subdirectory in tests/ui and give it a meaningful name. Please add a doc
comment at the top of the file explaining why this test exists, even better if
you can briefly explain how the example causes rustc to crash previously and
what was done to prevent rustc to ICE/panic/crash.
Adding
Fixes #NNNNN
Fixes #MMMMM
to the description of your pull request will ensure the corresponding tickets be closed automatically upon merge.
Make sure that your fix actually fixes the root cause of the issue and not just
a subset first. The issue numbers can be found in the file name or the //@ known-bug directive inside the test file.
Building auxiliary crates
It is common that some tests require additional auxiliary crates to be compiled. There are multiple directives to assist with that:
aux-buildaux-crateaux-binaux-codegen-backend
aux-build will build a separate crate from the named source file. The source
file should be in a directory called auxiliary beside the test file.
//@ aux-build: my-helper.rs
extern crate my_helper;
// ... You can use my_helper.
The aux crate will be built as a dylib if possible (unless on a platform that
does not support them, or the no-prefer-dynamic header is specified in the aux
file). The -L flag is used to find the extern crates.
aux-crate is very similar to aux-build. However, it uses the --extern flag
to link to the extern crate to make the crate be available as an extern prelude.
That allows you to specify the additional syntax of the --extern flag, such as
renaming a dependency. For example, // aux-crate:foo=bar.rs will compile
auxiliary/bar.rs and make it available under then name foo within the test.
This is similar to how Cargo does dependency renaming.
aux-bin is similar to aux-build but will build a binary instead of a
library. The binary will be available in auxiliary/bin relative to the working
directory of the test.
aux-codegen-backend is similar to aux-build, but will then pass the compiled
dylib to -Zcodegen-backend when building the main file. This will only work
for tests in tests/ui-fulldeps, since it requires the use of compiler crates.
Auxiliary proc-macro
If you want a proc-macro dependency, then there currently is some ceremony needed.
Place the proc-macro itself in a file like auxiliary/my-proc-macro.rs with the
following structure:
//@ force-host
//@ no-prefer-dynamic
#![crate_type = "proc-macro"]
extern crate proc_macro;
use proc_macro::TokenStream;
#[proc_macro]
pub fn foo(input: TokenStream) -> TokenStream {
"".parse().unwrap()
}
The force-host is needed because proc-macros are loaded in the host compiler,
and no-prefer-dynamic is needed to tell compiletest to not use
prefer-dynamic which is not compatible with proc-macros. The #![crate_type]
attribute is needed to specify the correct crate-type.
Then in your test, you can build with aux-build:
//@ aux-build: my-proc-macro.rs
extern crate my_proc_macro;
fn main() {
my_proc_macro::foo!();
}
Revisions
Revisions allow a single test file to be used for multiple tests. This is done by adding a special directive at the top of the file:
//@ revisions: foo bar baz
This will result in the test being compiled (and tested) three times, once with
--cfg foo, once with --cfg bar, and once with --cfg baz. You can therefore
use #[cfg(foo)] etc within the test to tweak each of these results.
You can also customize directives and expected error messages to a particular
revision. To do this, add [revision-name] after the //@ for directives, and
after // for UI error annotations, like so:
// A flag to pass in only for cfg `foo`:
//@[foo]compile-flags: -Z verbose-internals
#[cfg(foo)]
fn test_foo() {
let x: usize = 32_u32; //[foo]~ ERROR mismatched types
}
Multiple revisions can be specified in a comma-separated list, such as
//[foo,bar,baz]~^.
In test suites that use the LLVM FileCheck tool, the current revision name is also registered as an additional prefix for FileCheck directives:
//@ revisions: NORMAL COVERAGE
//@[COVERAGE] compile-flags: -Cinstrument-coverage
//@[COVERAGE] needs-profiler-runtime
// COVERAGE: @__llvm_coverage_mapping
// NORMAL-NOT: @__llvm_coverage_mapping
// CHECK: main
fn main() {}
Note that not all directives have meaning when customized to a revision. For
example, the ignore-test directives (and all "ignore" directives) currently
only apply to the test as a whole, not to particular revisions. The only
directives that are intended to really work when customized to a revision are
error patterns and compiler flags.
The following test suites support revisions:
- ui
- assembly
- codegen
- coverage
- debuginfo
- rustdoc UI tests
- incremental (these are special in that they inherently cannot be run in parallel)
Ignoring unused revision names
Normally, revision names mentioned in other directives and error annotations
must correspond to an actual revision declared in a revisions directive. This is
enforced by an ./x test tidy check.
If a revision name needs to be temporarily removed from the revision list for
some reason, the above check can be suppressed by adding the revision name to an
//@ unused-revision-names: header instead.
Specifying an unused name of * (i.e. //@ unused-revision-names: *) will
permit any unused revision name to be mentioned.
Compare modes
Compiletest can be run in different modes, called compare modes, which can be used to compare the behavior of all tests with different compiler flags enabled. This can help highlight what differences might appear with certain flags, and check for any problems that might arise.
To run the tests in a different mode, you need to pass the --compare-mode CLI
flag:
./x test tests/ui --compare-mode=chalk
The possible compare modes are:
polonius— Runs with Polonius with-Zpolonius.chalk— Runs with Chalk with-Zchalk.split-dwarf— Runs with unpacked split-DWARF with-Csplit-debuginfo=unpacked.split-dwarf-single— Runs with packed split-DWARF with-Csplit-debuginfo=packed.
See UI compare modes for more information about how UI tests support different output for different modes.
In CI, compare modes are only used in one Linux builder, and only with the following settings:
tests/debuginfo: Usessplit-dwarfmode. This helps ensure that none of the debuginfo tests are affected when enabling split-DWARF.
Note that compare modes are separate to revisions. All revisions
are tested when running ./x test tests/ui, however compare-modes must be
manually run individually via the --compare-mode flag.
UI tests
- Introduction
- General structure of a test
- Output comparison
- Error annotations
- Controlling pass/fail expectations
- Known bugs
- Test organization
- Rustfix tests
- Compare modes
rustc_*TEST attributes
UI tests are a particular test suite of compiletest.
Introduction
The tests in tests/ui are a collection of general-purpose tests which
primarily focus on validating the console output of the compiler, but can be
used for many other purposes. For example, tests can also be configured to run
the resulting program to verify its
behavior.
If you need to work with #![no_std] cross-compiling tests, consult the
minicore test auxiliary chapter.
General structure of a test
A test consists of a Rust source file located anywhere in the tests/ui
directory, but they should be placed in a suitable sub-directory. For example,
tests/ui/hello.rs is a basic hello-world test.
Compiletest will use rustc to compile the test, and compare the output against
the expected output which is stored in a .stdout or .stderr file located
next to the test. See Output comparison for more.
Additionally, errors and warnings should be annotated with comments within the source file. See Error annotations for more.
Compiletest directives in the form of special comments prefixed
with //@ control how the test is compiled and what the expected behavior is.
Tests are expected to fail to compile, since most tests are testing compiler errors. You can change that behavior with a directive, see Controlling pass/fail expectations.
By default, a test is built as an executable binary. If you need a different
crate type, you can use the #![crate_type] attribute to set it as needed.
Output comparison
UI tests store the expected output from the compiler in .stderr and .stdout
snapshots next to the test. You normally generate these files with the --bless
CLI option, and then inspect them manually to verify they contain what you
expect.
The output is normalized to ignore unwanted differences, see the Normalization section. If the file is missing, then compiletest expects the corresponding output to be empty.
There can be multiple stdout/stderr files. The general form is:
*test-name*`.`*revision*`.`*compare_mode*`.`*extension*
- test-name cannot contain dots. This is so that the general form of test output filenames have a predictable form we can pattern match on in order to track stray test output files.
- revision is the revision name. This is not included when not using revisions.
- compare_mode is the compare mode. This will only be checked when the given compare mode is active. If the file does not exist, then compiletest will check for a file without the compare mode.
- extension is the kind of output being checked:
stderr— compiler stderrstdout— compiler stdoutrun.stderr— stderr when running the testrun.stdout— stdout when running the test64bit.stderr— compiler stderr withstderr-per-bitwidthdirective on a 64-bit target32bit.stderr— compiler stderr withstderr-per-bitwidthdirective on a 32-bit target
A simple example would be foo.stderr next to a foo.rs test.
A more complex example would be foo.my-revision.polonius.stderr.
There are several directives which will change how compiletest will check for output files:
stderr-per-bitwidth— checks separate output files based on the target pointer width. Consider using thenormalize-stderrdirective instead (see Normalization).dont-check-compiler-stderr— Ignores stderr from the compiler.dont-check-compiler-stdout— Ignores stdout from the compiler.compare-output-lines-by-subset— Checks that the output contains the contents of the stored output files by lines opposed to checking for strict equality.
UI tests run with -Zdeduplicate-diagnostics=no flag which disables rustc's
built-in diagnostic deduplication mechanism. This means you may see some
duplicate messages in the output. This helps illuminate situations where
duplicate diagnostics are being generated.
Normalization
The compiler output is normalized to eliminate output difference between platforms, mainly about filenames.
Compiletest makes the following replacements on the compiler output:
- The directory where the test is defined is replaced with
$DIR. Example:/path/to/rust/tests/ui/error-codes - The directory to the standard library source is replaced with
$SRC_DIR. Example:/path/to/rust/library - Line and column numbers for paths in
$SRC_DIRare replaced withLL:COL. This helps ensure that changes to the layout of the standard library do not cause widespread changes to the.stderrfiles. Example:$SRC_DIR/alloc/src/sync.rs:53:46 - The base directory where the test's output goes is replaced with
$TEST_BUILD_DIR. This only comes up in a few rare circumstances. Example:/path/to/rust/build/x86_64-unknown-linux-gnu/test/ui - Tabs are replaced with
\t. - Backslashes (
\) are converted to forward slashes (/) within paths (using a heuristic). This helps normalize differences with Windows-style paths. - CRLF newlines are converted to LF.
- Error line annotations like
//~ ERROR some messageare removed. - Various v0 and legacy symbol hashes are replaced with placeholders like
[HASH]or<SYMBOL_HASH>.
Additionally, the compiler is run with the -Z ui-testing flag which causes
the compiler itself to apply some changes to the diagnostic output to make it
more suitable for UI testing.
For example, it will anonymize line numbers in the output (line numbers
prefixing each source line are replaced with LL). In extremely rare
situations, this mode can be disabled with the directive //@ compile-flags: -Z ui-testing=no.
Note: The line and column numbers for --> lines pointing to the test are not
normalized, and left as-is. This ensures that the compiler continues to point to
the correct location, and keeps the stderr files readable. Ideally all
line/column information would be retained, but small changes to the source
causes large diffs, and more frequent merge conflicts and test errors.
Sometimes these built-in normalizations are not enough. In such cases, you may
provide custom normalization rules using normalize-* directives, e.g.
//@ normalize-stdout-test: "foo" -> "bar"
//@ normalize-stderr-32bit: "fn\(\) \(32 bits\)" -> "fn\(\) \($$PTR bits\)"
//@ normalize-stderr-64bit: "fn\(\) \(64 bits\)" -> "fn\(\) \($$PTR bits\)"
This tells the test, on 32-bit platforms, whenever the compiler writes fn() (32 bits) to stderr, it should be normalized to read fn() ($PTR bits) instead.
Similar for 64-bit. The replacement is performed by regexes using default regex
flavor provided by regex crate.
The corresponding reference file will use the normalized output to test both 32-bit and 64-bit platforms:
...
|
= note: source type: fn() ($PTR bits)
= note: target type: u16 (16 bits)
...
Please see ui/transmute/main.rs and main.stderr for a concrete
usage example.
Besides normalize-stderr-32bit and -64bit, one may use any target
information or stage supported by ignore-X here
as well (e.g. normalize-stderr-windows or simply normalize-stderr-test for
unconditional replacement).
Error annotations
Error annotations specify the errors that the compiler is expected to emit. They are "attached" to the line in source where the error is located.
fn main() {
boom //~ ERROR cannot find value `boom` in this scope [E0425]
}
Although UI tests have a .stderr file which contains the entire compiler
output, UI tests require that errors are also annotated within the source. This
redundancy helps avoid mistakes since the .stderr files are usually
auto-generated. It also helps to directly see where the error spans are expected
to point to by looking at one file instead of having to compare the .stderr
file with the source. Finally, they ensure that no additional unexpected errors
are generated.
They have several forms, but generally are a comment with the diagnostic level
(such as ERROR) and a substring of the expected error output. You don't have
to write out the entire message, just make sure to include the important part of
the message to make it self-documenting.
The error annotation needs to match with the line of the diagnostic. There are several ways to match the message with the line (see the examples below):
~: Associates the error level and message with the current line~^: Associates the error level and message with the previous error annotation line. Each caret (^) that you add adds a line to this, so~^^^is three lines above the error annotation line.~|: Associates the error level and message with the same line as the previous comment. This is more convenient than using multiple carets when there are multiple messages associated with the same line.
Example:
let _ = same_line; //~ ERROR undeclared variable
fn meow(_: [u8]) {}
//~^ ERROR unsized
//~| ERROR anonymous parameters
The space character between //~ (or other variants) and the subsequent text is
negligible (i.e. there is no semantic difference between //~ ERROR and
//~ERROR although the former is more common in the codebase).
Error annotation examples
Here are examples of error annotations on different lines of UI test source.
Positioned on error line
Use the //~ ERROR idiom:
fn main() {
let x = (1, 2, 3);
match x {
(_a, _x @ ..) => {} //~ ERROR `_x @` is not allowed in a tuple
_ => {}
}
}
Positioned below error line
Use the //~^ idiom with number of carets in the string to indicate the number
of lines above. In the example below, the error line is four lines above the
error annotation line so four carets are included in the annotation.
fn main() {
let x = (1, 2, 3);
match x {
(_a, _x @ ..) => {} // <- the error is on this line
_ => {}
}
}
//~^^^^ ERROR `_x @` is not allowed in a tuple
Use same error line as defined on error annotation line above
Use the //~| idiom to define the same error line as the error annotation
line above:
struct Binder(i32, i32, i32);
fn main() {
let x = Binder(1, 2, 3);
match x {
Binder(_a, _x @ ..) => {} // <- the error is on this line
_ => {}
}
}
//~^^^^ ERROR `_x @` is not allowed in a tuple struct
//~| ERROR this pattern has 1 field, but the corresponding tuple struct has 3 fields [E0023]
error-pattern
The error-pattern directive can be used for messages that don't
have a specific span.
Let's think about this test:
fn main() {
let a: *const [_] = &[1, 2, 3];
unsafe {
let _b = (*a)[3];
}
}
We want to ensure this shows "index out of bounds" but we cannot use the ERROR
annotation since the error doesn't have any span. Then it's time to use the
error-pattern directive:
//@ error-pattern: index out of bounds
fn main() {
let a: *const [_] = &[1, 2, 3];
unsafe {
let _b = (*a)[3];
}
}
But for strict testing, try to use the ERROR annotation as much as possible.
Error levels
The error levels that you can have are:
ERRORWARNorWARNINGNOTEHELPandSUGGESTION
You are allowed to not include a level, but you should include it at least for the primary message.
The SUGGESTION level is used for specifying what the expected replacement text
should be for a diagnostic suggestion.
UI tests use the -A unused flag by default to ignore all unused warnings, as
unused warnings are usually not the focus of a test. However, simple code
samples often have unused warnings. If the test is specifically testing an
unused warning, just add the appropriate #![warn(unused)] attribute as needed.
cfg revisions
When using revisions, different messages can be conditionally checked based on the current revision. This is done by placing the revision cfg name in brackets like this:
//@ edition:2018
//@ revisions: mir thir
//@[thir] compile-flags: -Z thir-unsafeck
async unsafe fn f() {}
async fn g() {
f(); //~ ERROR call to unsafe function is unsafe
}
fn main() {
f(); //[mir]~ ERROR call to unsafe function is unsafe
}
In this example, the second error message is only emitted in the mir revision.
The thir revision only emits the first error.
If the cfg causes the compiler to emit different output, then a test can have
multiple .stderr files for the different outputs. In the example above, there
would be a .mir.stderr and .thir.stderr file with the different outputs of
the different revisions.
Note: cfg revisions also work inside the source code with
#[cfg]attributes.By convention, the
FALSEcfg is used to have an always-false config.
Controlling pass/fail expectations
By default, a UI test is expected to generate a compile error because most of the tests are checking for invalid input and error diagnostics. However, you can also make UI tests where compilation is expected to succeed, and you can even run the resulting program. Just add one of the following directives:
- Pass directives:
//@ check-pass— compilation should succeed but skip codegen (which is expensive and isn't supposed to fail in most cases).//@ build-pass— compilation and linking should succeed but do not run the resulting binary.//@ run-pass— compilation should succeed and running the resulting binary should also succeed.
- Fail directives:
//@ check-fail— compilation should fail (the codegen phase is skipped). This is the default for UI tests.//@ build-fail— compilation should fail during the codegen phase. This will runrustctwice, once to verify that it compiles successfully without the codegen phase, then a second time the full compile should fail.//@ run-fail— compilation should succeed, but running the resulting binary should fail.
For run-pass and run-fail tests, by default the output of the program itself
is not checked.
If you want to check the output of running the program, include the
check-run-results directive. This will check for a .run.stderr and
.run.stdout files to compare against the actual output of the program.
Tests with the *-pass directives can be overridden with the --pass
command-line option:
./x test tests/ui --pass check
The --pass option only affects UI tests. Using --pass check can run the UI
test suite much faster (roughly twice as fast on my system), though obviously
not exercising as much.
The ignore-pass directive can be used to ignore the --pass CLI flag if the
test won't work properly with that override.
Known bugs
The known-bug directive may be used for tests that demonstrate a known bug
that has not yet been fixed. Adding tests for known bugs is helpful for several
reasons, including:
- Maintaining a functional test that can be conveniently reused when the bug is fixed.
- Providing a sentinel that will fail if the bug is incidentally fixed. This can alert the developer so they know that the associated issue has been fixed and can possibly be closed.
Do not include error annotations in a test with
known-bug. The test should still include other normal directives and
stdout/stderr files.
Test organization
When deciding where to place a test file, please try to find a subdirectory that best matches what you are trying to exercise. Do your best to keep things organized. Admittedly it can be difficult as some tests can overlap different categories, and the existing layout may not fit well.
Name the test by a concise description of what the test is checking. Avoid including the issue number in the test name. See best practices for a more in-depth discussion of this.
Ideally, the test should be added to a directory that helps identify what piece
of code is being tested here (e.g.,
tests/ui/borrowck/reject-move-out-of-borrow-via-pat.rs)
When writing a new feature, you may want to create a subdirectory to store
your tests. For example, if you are implementing RFC 1234 ("Widgets"), then it
might make sense to put the tests in a directory like
tests/ui/rfc1234-widgets/.
In other cases, there may already be a suitable directory.
Over time, the tests/ui directory has grown very fast. There is a check in
tidy that will ensure none of the subdirectories has more than
1000 entries. Having too many files causes problems because it isn't editor/IDE
friendly and the GitHub UI won't show more than 1000 entries. However, since
tests/ui (UI test root directory) and tests/ui/issues directories have more
than 1000 entries, we set a different limit for those directories. So, please
avoid putting a new test there and try to find a more relevant place.
For example, if your test is related to closures, you should put it in
tests/ui/closures. When you reach the limit, you could increase it by tweaking
here.
Rustfix tests
UI tests can validate that diagnostic suggestions apply correctly and that the
resulting changes compile correctly. This can be done with the run-rustfix
directive:
//@ run-rustfix
//@ check-pass
#![crate_type = "lib"]
pub struct not_camel_case {}
//~^ WARN `not_camel_case` should have an upper camel case name
//~| HELP convert the identifier to upper camel case
//~| SUGGESTION NotCamelCase
Rustfix tests should have a file with the .fixed extension which contains the
source file after the suggestion has been applied.
- When the test is run, compiletest first checks that the correct lint/warning is generated.
- Then, it applies the suggestion and compares against
.fixed(they must match). - Finally, the fixed source is compiled, and this compilation is required to succeed.
Usually when creating a rustfix test you will generate the .fixed file
automatically with the x test --bless option.
The run-rustfix directive will cause all suggestions to be applied, even if
they are not MachineApplicable. If this is a
problem, then you can add the rustfix-only-machine-applicable directive in
addition to run-rustfix. This should be used if there is a mixture of
different suggestion levels, and some of the non-machine-applicable ones do not
apply cleanly.
Compare modes
Compare modes can be used to run all tests with different flags from what they are normally compiled with. In some cases, this might result in different output from the compiler. To support this, different output files can be saved which contain the output based on the compare mode.
For example, when using the Polonius mode, a test foo.rs will first look for
expected output in foo.polonius.stderr, falling back to the usual foo.stderr
if not found. This is useful as different modes can sometimes result in
different diagnostics and behavior. This can help track which tests have
differences between the modes, and to visually inspect those diagnostic
differences.
If in the rare case you encounter a test that has different behavior, you can run something like the following to generate the alternate stderr file:
./x test tests/ui --compare-mode=polonius --bless
Currently none of the compare modes are checked in CI for UI tests.
rustc_* TEST attributes
The compiler defines several perma-unstable #[rustc_*] attributes gated behind
the internal feature rustc_attrs that dump extra compiler-internal
information. See the corresponding subsection in compiler debugging for more
details.
They can be used in tests to more precisely, legibly and easily test internal compiler state in cases where it would otherwise be very hard to do the same with "user-facing" Rust alone. Indeed, one could say that this slightly abuses the term "UI" (user interface) and turns such UI tests from black-box tests into white-box ones. Use them carefully and sparingly.
Compiletest directives
FIXME(jieyouxu) completely revise this chapter.
Directives are special comments that tell compiletest how to build and interpret
a test. They must appear before the Rust source in the test. They may also
appear in rmake.rs or legacy Makefiles for run-make
tests.
They are normally put after the short comment that explains the point of this
test. Compiletest test suites use //@ to signal that a comment is a directive.
For example, this test uses the //@ compile-flags command to specify a custom
flag to give to rustc when the test is compiled:
// Test the behavior of `0 - 1` when overflow checks are disabled.
//@ compile-flags: -C overflow-checks=off
fn main() {
let x = 0 - 1;
...
}
Directives can be standalone (like //@ run-pass) or take a value (like //@ compile-flags: -C overflow-checks=off).
Directives are written one directive per line: you cannot write multiple
directives on the same line. For example, if you write //@ only-x86 only-windows then only-windows is interpreted as a comment, not a separate
directive.
Listing of compiletest directives
The following is a list of compiletest directives. Directives are linked to
sections that describe the command in more detail if available. This list may
not be exhaustive. Directives can generally be found by browsing the
TestProps structure found in header.rs from the compiletest source.
Assembly
| Directive | Explanation | Supported test suites | Possible values |
|---|---|---|---|
assembly-output | Assembly output kind to check | assembly | emit-asm, bpf-linker, ptx-linker |
Auxiliary builds
| Directive | Explanation | Supported test suites | Possible values |
|---|---|---|---|
aux-bin | Build a aux binary, made available in auxiliary/bin relative to test directory | All except run-make | Path to auxiliary .rs file |
aux-build | Build a separate crate from the named source file | All except run-make | Path to auxiliary .rs file |
aux-crate | Like aux-build but makes available as extern prelude | All except run-make | <extern_prelude_name>=<path/to/aux/file.rs> |
aux-codegen-backend | Similar to aux-build but pass the compiled dylib to -Zcodegen-backend when building the main file | ui-fulldeps | Path to codegen backend file |
build_aux_docs | Build docs for auxiliaries as well | All except run-make | N/A |
Controlling outcome expectations
See Controlling pass/fail expectations.
| Directive | Explanation | Supported test suites | Possible values |
|---|---|---|---|
check-pass | Building (no codegen) should pass | ui, crashes, incremental | N/A |
check-fail | Building (no codegen) should fail | ui, crashes | N/A |
build-pass | Building should pass | ui, crashes, codegen, incremental | N/A |
build-fail | Building should fail | ui, crashes | N/A |
run-pass | Running the test binary should pass | ui, crashes, incremental | N/A |
run-fail | Running the test binary should fail | ui, crashes | N/A |
ignore-pass | Ignore --pass flag | ui, crashes, codegen, incremental | N/A |
dont-check-failure-status | Don't check exact failure status (i.e. 1) | ui, incremental | N/A |
failure-status | Check | ui, crashes | Any u16 |
should-ice | Check failure status is 101 | coverage, incremental | N/A |
should-fail | Compiletest self-test | All | N/A |
Controlling output snapshots and normalizations
See Normalization, Output comparison and Rustfix tests for more details.
| Directive | Explanation | Supported test suites | Possible values |
|---|---|---|---|
check-run-results | Check run test binary run-{pass,fail} output snapshot | ui, crashes, incremental if run-pass | N/A |
error-pattern | Check that output contains a regex pattern | ui, crashes, incremental if run-pass | Regex |
check-stdout | Check stdout against error-patterns from running test binary1 | ui, crashes, incremental | N/A |
compare-output-lines-by-subset | Check output contains the contents of the snapshot by lines opposed to checking for strict equality | ui, coverage | N/A |
normalize-stderr-32bit | Normalize actual stderr (for 32-bit platforms) with a rule "<raw>" -> "<normalized>" before comparing against snapshot | ui, incremental | "<RAW>" -> "<NORMALIZED>", <RAW>/<NORMALIZED> is regex capture and replace syntax |
normalize-stderr-64bit | Normalize actual stderr (for 64-bit platforms) with a rule "<raw>" -> "<normalized>" before comparing against snapshot | ui, incremental | "<RAW>" -> "<NORMALIZED>", <RAW>/<NORMALIZED> is regex capture and replace syntax |
normalize-stderr-test | Normalize actual stderr with a rule "<raw>" -> "<normalized>" before comparing against snapshot | ui, incremental | "<RAW>" -> "<NORMALIZED>", <RAW>/<NORMALIZED> is regex capture and replace syntax |
normalize-stdout-test | Normalize actual stdout with a rule "<raw>" -> "<normalized>" before comparing against snapshot | ui, incremental | "<RAW>" -> "<NORMALIZED>", <RAW>/<NORMALIZED> is regex capture and replace syntax |
dont-check-compiler-stderr | Don't check actual compiler stderr vs stderr snapshot | ui | N/A |
dont-check-compiler-stdout | Don't check actual compiler stdout vs stdout snapshot | ui | N/A |
run-rustfix | Apply all suggestions via rustfix, snapshot fixed output, and check fixed output builds | ui | N/A |
rustfix-only-machine-applicable | run-rustfix but only machine-applicable suggestions | ui | N/A |
exec-env | Env var to set when executing a test | ui, crashes | <KEY>=<VALUE> |
unset-exec-env | Env var to unset when executing a test | ui, crashes | Any env var name |
stderr-per-bitwidth | Generate a stderr snapshot for each bitwidth | ui | N/A |
forbid-output | A pattern which must not appear in cfail output | incremental | Regex pattern |
run-flags | Flags passed to the test executable | ui | Arbitrary flags |
known-bug | No error annotation needed due to known bug | ui, crashes, incremental | Issue number #123456 |
presently this has a weird quirk
where the test binary's stdout and stderr gets concatenated and then
error-patterns are matched on this combined output, which is ??? slightly
questionable to say the least.
Controlling when tests are run
These directives are used to ignore the test in some situations, which means the test won't be compiled or run.
ignore-XwhereXis a target detail or stage will ignore the test accordingly (see below)only-Xis likeignore-X, but will only run the test on that target or stageignore-testalways ignores the test. This can be used to temporarily disable a test if it is currently not working, but you want to keep it in tree to re-enable it later.
Some examples of X in ignore-X or only-X:
- A full target triple:
aarch64-apple-ios - Architecture:
aarch64,arm,mips,wasm32,x86_64,x86, ... - OS:
android,emscripten,freebsd,ios,linux,macos,windows, ... - Environment (fourth word of the target triple):
gnu,msvc,musl - WASM:
wasm32-barematcheswasm32-unknown-unknown.emscriptenalso matches that target as well as the emscripten targets. - Pointer width:
32bit,64bit - Endianness:
endian-big - Stage:
stage0,stage1,stage2 - Channel:
stable,beta - When cross compiling:
cross-compile - When remote testing is used:
remote - When particular debuggers are being tested:
cdb,gdb,lldb - When particular debugger versions are matched:
ignore-gdb-version - Specific compare modes:
compare-mode-polonius,compare-mode-chalk,compare-mode-split-dwarf,compare-mode-split-dwarf-single - The two different test modes used by coverage tests:
ignore-coverage-map,ignore-coverage-run
The following directives will check rustc build settings and target settings:
needs-asm-support— ignores if it is running on a target that doesn't have stable support forasm!needs-profiler-runtime— ignores the test if the profiler runtime was not enabled for the target (build.profiler = truein rustc'sconfig.toml)needs-sanitizer-support— ignores if the sanitizer support was not enabled for the target (sanitizers = truein rustc'sconfig.toml)needs-sanitizer-{address,hwaddress,leak,memory,thread}— ignores if the corresponding sanitizer is not enabled for the target (AddressSanitizer, hardware-assisted AddressSanitizer, LeakSanitizer, MemorySanitizer or ThreadSanitizer respectively)needs-run-enabled— ignores if it is a test that gets executed, and running has been disabled. Running tests can be disabled with thex test --run=neverflag, or running on fuchsia.needs-unwind— ignores if the target does not support unwindingneeds-rust-lld— ignores if the rust lld support is not enabled (rust.lld = trueinconfig.toml)needs-threads— ignores if the target does not have threading supportneeds-symlink— ignores if the target does not support symlinks. This can be the case on Windows if the developer did not enable privileged symlink permissions.ignore-std-debug-assertions— ignores if std was built with debug assertions.needs-std-debug-assertions— ignores if std was not built with debug assertions.ignore-rustc-debug-assertions— ignores if rustc was built with debug assertions.needs-rustc-debug-assertions— ignores if rustc was not built with debug assertions.
The following directives will check LLVM support:
no-system-llvm— ignores if the system llvm is usedmin-llvm-version: 13.0— ignored if the LLVM version is less than the given valuemin-system-llvm-version: 12.0— ignored if using a system LLVM and its version is less than the given valueignore-llvm-version: 9.0— ignores a specific LLVM versionignore-llvm-version: 7.0 - 9.9.9— ignores LLVM versions in a range (inclusive)needs-llvm-components: powerpc— ignores if the specific LLVM component was not built. Note: The test will fail on CI (whenCOMPILETEST_REQUIRE_ALL_LLVM_COMPONENTSis set) if the component does not exist.needs-forced-clang-based-tests— test is ignored unless the environment variableRUSTBUILD_FORCE_CLANG_BASED_TESTSis set, which enables building clang alongside LLVM- This is only set in two CI jobs (
x86_64-gnu-debugandaarch64-gnu-debug), which only runs a subset ofrun-maketests. Other tests with this directive will not run at all, which is usually not what you want. - Notably, the
aarch64-gnu-debugCI job currently only runsrun-maketests which additionally containclangin their test name.
- This is only set in two CI jobs (
See also Debuginfo tests for directives for ignoring debuggers.
Affecting how tests are built
| Directive | Explanation | Supported test suites | Possible values |
|---|---|---|---|
compile-flags | Flags passed to rustc when building the test or aux file | All except for run-make | Any valid rustc flags, e.g. -Awarnings -Dfoo. Cannot be -Cincremental. |
edition | Alias for compile-flags: --edition=xxx | All except for run-make | Any valid --edition value |
rustc-env | Env var to set when running rustc | All except for run-make | <KEY>=<VALUE> |
unset-rustc-env | Env var to unset when running rustc | All except for run-make | Any env var name |
incremental | Proper incremental support for tests outside of incremental test suite | ui, crashes | N/A |
no-prefer-dynamic | Don't use -C prefer-dynamic, don't build as a dylib via a --crate-type=dylib preset flag | ui, crashes | N/A |
Consider writing the test as a proper incremental test instead.
Rustdoc
| Directive | Explanation | Supported test suites | Possible values |
|---|---|---|---|
doc-flags | Flags passed to rustdoc when building the test or aux file | rustdoc, js-doc-test, rustdoc-json | Any valid rustdoc flags |
FIXME(rustdoc): what does
check-test-line-numbers-matchdo?
Pretty printing
See Pretty-printer.
Misc directives
no-auto-check-cfg— disable auto check-cfg (only for--check-cfgtests)revisions— compile multiple timesunused-revision-names- suppress tidy checks for mentioning unknown revision names -forbid-output— incremental cfail rejects output patternshould-ice— incremental cfail should ICEreference— an annotation linking to a rule in the reference
Tool-specific directives
The following directives affect how certain command-line tools are invoked, in test suites that use those tools:
filecheck-flagsadds extra flags when running LLVM'sFileChecktool.- Used by codegen tests, assembly tests, and MIR-opt tests.
llvm-cov-flagsadds extra flags when running LLVM'sllvm-covtool.- Used by coverage tests in
coverage-runmode.
- Used by coverage tests in
Substitutions
Directive values support substituting a few variables which will be replaced with their corresponding value. For example, if you need to pass a compiler flag with a path to a specific file, something like the following could work:
//@ compile-flags: --remap-path-prefix={{src-base}}=/the/src
Where the sentinel {{src-base}} will be replaced with the appropriate path
described below:
{{cwd}}: The directory where compiletest is run from. This may not be the root of the checkout, so you should avoid using it where possible.- Examples:
/path/to/rust,/path/to/build/root
- Examples:
{{src-base}}: The directory where the test is defined. This is equivalent to$DIRfor output normalization.- Example:
/path/to/rust/tests/ui/error-codes
- Example:
{{build-base}}: The base directory where the test's output goes. This is equivalent to$TEST_BUILD_DIRfor output normalization.- Example:
/path/to/rust/build/x86_64-unknown-linux-gnu/test/ui
- Example:
{{rust-src-base}}: The sysroot directory where libstd/libcore/... are located{{sysroot-base}}: Path of the sysroot directory used to build the test.- Mainly intended for
ui-fulldepstests that run the compiler via API.
- Mainly intended for
{{target-linker}}: Linker that would be passed to-Clinkerfor this test, or blank if no linker override is active.- Mainly intended for
ui-fulldepstests that run the compiler via API.
- Mainly intended for
{{target}}: The target the test is compiling for- Example:
x86_64-unknown-linux-gnu
- Example:
See
tests/ui/commandline-argfile.rs
for an example of a test that uses this substitution.
Adding a directive
One would add a new directive if there is a need to define some test property or behavior on an individual, test-by-test basis. A directive property serves as the directive's backing store (holds the command's current value) at runtime.
To add a new directive property:
- Look for the
pub struct TestPropsdeclaration insrc/tools/compiletest/src/header.rsand add the new public property to the end of the declaration. - Look for the
impl TestPropsimplementation block immediately following the struct declaration and initialize the new property to its default value.
Adding a new directive parser
When compiletest encounters a test file, it parses the file a line at a time
by calling every parser defined in the Config struct's implementation block,
also in src/tools/compiletest/src/header.rs (note that the Config struct's
declaration block is found in src/tools/compiletest/src/common.rs).
TestProps's load_from() method will try passing the current line of text to
each parser, which, in turn typically checks to see if the line begins with a
particular commented (//@) directive such as //@ must-compile-successfully
or //@ failure-status. Whitespace after the comment marker is optional.
Parsers will override a given directive property's default value merely by being specified in the test file as a directive or by having a parameter value specified in the test file, depending on the directive.
Parsers defined in impl Config are typically named parse_<directive-name>
(note kebab-case <directive-command> transformed to snake-case
<directive_command>). impl Config also defines several 'low-level' parsers
which make it simple to parse common patterns like simple presence or not
(parse_name_directive()), directive:parameter(s)
(parse_name_value_directive()), optional parsing only if a particular cfg
attribute is defined (has_cfg_prefix()) and many more. The low-level parsers
are found near the end of the impl Config block; be sure to look through them
and their associated parsers immediately above to see how they are used to avoid
writing additional parsing code unnecessarily.
As a concrete example, here is the implementation for the
parse_failure_status() parser, in src/tools/compiletest/src/header.rs:
@@ -232,6 +232,7 @@ pub struct TestProps {
// customized normalization rules
pub normalize_stdout: Vec<(String, String)>,
pub normalize_stderr: Vec<(String, String)>,
+ pub failure_status: i32,
}
impl TestProps {
@@ -260,6 +261,7 @@ impl TestProps {
run_pass: false,
normalize_stdout: vec![],
normalize_stderr: vec![],
+ failure_status: 101,
}
}
@@ -383,6 +385,10 @@ impl TestProps {
if let Some(rule) = config.parse_custom_normalization(ln, "normalize-stderr") {
self.normalize_stderr.push(rule);
}
+
+ if let Some(code) = config.parse_failure_status(ln) {
+ self.failure_status = code;
+ }
});
for key in &["RUST_TEST_NOCAPTURE", "RUST_TEST_THREADS"] {
@@ -488,6 +494,13 @@ impl Config {
self.parse_name_directive(line, "pretty-compare-only")
}
+ fn parse_failure_status(&self, line: &str) -> Option<i32> {
+ match self.parse_name_value_directive(line, "failure-status") {
+ Some(code) => code.trim().parse::<i32>().ok(),
+ _ => None,
+ }
+ }
Implementing the behavior change
When a test invokes a particular directive, it is expected that some behavior
will change as a result. What behavior, obviously, will depend on the purpose of
the directive. In the case of failure-status, the behavior that changes is
that compiletest expects the failure code defined by the directive invoked in
the test, rather than the default value.
Although specific to failure-status (as every directive will have a different
implementation in order to invoke behavior change) perhaps it is helpful to see
the behavior change implementation of one case, simply as an example. To
implement failure-status, the check_correct_failure_status() function found
in the TestCx implementation block, located in
src/tools/compiletest/src/runtest.rs, was modified as per below:
@@ -295,11 +295,14 @@ impl<'test> TestCx<'test> {
}
fn check_correct_failure_status(&self, proc_res: &ProcRes) {
- // The value the Rust runtime returns on failure
- const RUST_ERR: i32 = 101;
- if proc_res.status.code() != Some(RUST_ERR) {
+ let expected_status = Some(self.props.failure_status);
+ let received_status = proc_res.status.code();
+
+ if expected_status != received_status {
self.fatal_proc_rec(
- &format!("failure produced the wrong error: {}", proc_res.status),
+ &format!("Error: expected failure status ({:?}) but received status {:?}.",
+ expected_status,
+ received_status),
proc_res,
);
}
@@ -320,7 +323,6 @@ impl<'test> TestCx<'test> {
);
let proc_res = self.exec_compiled_test();
-
if !proc_res.status.success() {
self.fatal_proc_rec("test run failed!", &proc_res);
}
@@ -499,7 +501,6 @@ impl<'test> TestCx<'test> {
expected,
actual
);
- panic!();
}
}
Note the use of self.props.failure_status to access the directive property. In
tests which do not specify the failure status directive,
self.props.failure_status will evaluate to the default value of 101 at the
time of this writing. But for a test which specifies a directive of, for
example, //@ failure-status: 1, self.props.failure_status will evaluate to
1, as parse_failure_status() will have overridden the TestProps default
value, for that test specifically.
minicore test auxiliary: using core stubs
tests/auxiliary/minicore.rs is a test auxiliary for
ui/codegen/assembly test suites. It provides core stubs for tests that need to
build for cross-compiled targets but do not need/want to run.
A test can use minicore by specifying the //@ add-core-stubs directive.
Then, mark the test with #![feature(no_core)] + #![no_std] + #![no_core].
Due to Edition 2015 extern prelude rules, you will probably need to declare
minicore as an extern crate.
Due to the no_std + no_core nature of these tests, //@ add-core-stubs
implies and requires that the test will be built with -C panic=abort.
Unwinding panics are not supported.
If you find a core item to be missing from the minicore stub, consider
adding it to the test auxiliary if it's likely to be used or is already needed
by more than one test.
Example codegen test that uses minicore
#![allow(unused)] fn main() { //@ add-core-stubs //@ revisions: meow bark //@[meow] compile-flags: --target=x86_64-unknown-linux-gnu //@[meow] needs-llvm-components: x86 //@[bark] compile-flags: --target=wasm32-unknown-unknown //@[bark] needs-llvm-components: webassembly #![crate_type = "lib"] #![feature(no_core)] #![no_std] #![no_core] extern crate minicore; use minicore::*; struct Meow; impl Copy for Meow {} // `Copy` here is provided by `minicore` // CHECK-LABEL: meow #[unsafe(no_mangle)] fn meow() {} }
Ecosystem testing
Rust tests integration with real-world code in the ecosystem to catch regressions and make informed decisions about the evolution of the language.
Testing methods
Crater
Crater is a tool which runs tests on many thousands of public projects. This tool has its own separate infrastructure for running, and is not run as part of CI. See the Crater chapter for more details.
cargotest
cargotest is a small tool which runs cargo test on a few sample projects
(such as servo, ripgrep, tokei, etc.). This runs as part of CI and ensures
there aren't any significant regressions.
Example:
./x test src/tools/cargotest
Large OSS Project builders
We have CI jobs that build large open-source Rust projects that are used as regression tests in CI. Our integration jobs build the following projects:
Crater
Crater is a tool for compiling and running tests for every crate on crates.io (and a few on GitHub). It is mainly used for checking the extent of breakage when implementing potentially breaking changes and ensuring lack of breakage by running beta vs stable compiler versions.
When to run Crater
You should request a crater run if your PR makes large changes to the compiler or could cause breakage. If you are unsure, feel free to ask your PR's reviewer.
Requesting Crater Runs
The rust team maintains a few machines that can be used for running crater runs on the changes introduced by a PR. If your PR needs a crater run, leave a comment for the triage team in the PR thread. Please inform the team whether you require a "check-only" crater run, a "build only" crater run, or a "build-and-test" crater run. The difference is primarily in time; the conservative (if you're not sure) option is to go for the build-and-test run. If making changes that will only have an effect at compile-time (e.g., implementing a new trait) then you only need a check run.
Your PR will be enqueued by the triage team and the results will be posted when they are ready. Check runs will take around ~3-4 days, with the other two taking 5-6 days on average.
While crater is really useful, it is also important to be aware of a few caveats:
-
Not all code is on crates.io! There is a lot of code in repos on GitHub and elsewhere. Also, companies may not wish to publish their code. Thus, a successful crater run is not a magically green light that there will be no breakage; you still need to be careful.
-
Crater only runs Linux builds on x86_64. Thus, other architectures and platforms are not tested. Critically, this includes Windows.
-
Many crates are not tested. This could be for a lot of reasons, including that the crate doesn't compile any more (e.g. used old nightly features), has broken or flaky tests, requires network access, or other reasons.
-
Before crater can be run,
@bors tryneeds to succeed in building artifacts. This means that if your code doesn't compile, you cannot run crater.
Fuchsia integration tests
Fuchsia is an open-source operating system with about 2 million lines of Rust code.1 It has caught a large number of regressions in the past and was subsequently included in CI.
Building Fuchsia in CI
Fuchsia builds as part of the suite of bors tests that run before a pull request is merged.
If you are worried that a pull request might break the Fuchsia builder and want to test it out before submitting it to the bors queue, simply add this line to your PR description:
try-job: x86_64-fuchsia
Then when you @bors try it will pick the job that builds Fuchsia.
Building Fuchsia locally
Because Fuchsia uses languages other than Rust, it does not use Cargo as a build system. It also requires the toolchain build to be configured in a certain way.
The recommended way to build Fuchsia is to use the Docker scripts that check out and run a Fuchsia build for you. If you've run Docker tests before, you can simply run this command from your Rust checkout to download and build Fuchsia using your local Rust toolchain.
src/ci/docker/run.sh x86_64-fuchsia
See the Testing with Docker chapter for more details on how to run and debug jobs with Docker.
Note that a Fuchsia checkout is large – as of this writing, a checkout and build takes 46G of space – and as you might imagine, it takes a while to complete.
Modifying the Fuchsia checkout
The main reason you would want to build Fuchsia locally is because you need to
investigate a regression. After running a Docker build, you'll find the Fuchsia
checkout inside the obj/fuchsia directory of your Rust checkout. If you
modify the KEEP_CHECKOUT line in the build-fuchsia.sh script to
KEEP_CHECKOUT=1, you can change the checkout as needed and rerun the build
command above. This will reuse all the build results from before.
You can find more options to customize the Fuchsia checkout in the build-fuchsia.sh script.
Customizing the Fuchsia build
You can find more info about the options used to build Fuchsia in Rust CI in the build_fuchsia_from_rust_ci.sh script invoked by build-fuchsia.sh.
The Fuchsia build system uses GN, a metabuild system that generates Ninja files and then hands off the work of running the build to Ninja.
Fuchsia developers use fx to run builds and perform other development tasks.
This tool is located in .jiri_root/bin of the Fuchsia checkout; you may need
to add this to your $PATH for some workflows.
There are a few fx subcommands that are relevant, including:
fx setaccepts build arguments, writes them toout/default/args.gn, and runs GN.fx buildbuilds the Fuchsia project using Ninja. It will automatically pick up changes to build arguments and rerun GN. By default it builds everything, but it also accepts target paths to build specific targets (see below).fx clippyruns Clippy on specific Rust targets (or all of them). We use this in the Rust CI build to avoid running codegen on most Rust targets. Underneath it invokes Ninja, just likefx build. The clippy results are saved in json files inside the build output directory before being printed.
Target paths
GN uses paths like the following to identify build targets:
//src/starnix/kernel:starnix_core
The initial // means the root of the checkout, and the remaining slashes are
directory names. The string after : is the target name of a target defined
in the BUILD.gn file of that directory.
The target name can be omitted if it is the same as the directory name. In other
words, //src/starnix/kernel is the same as //src/starnix/kernel:kernel.
These target paths are used inside BUILD.gn files to reference dependencies,
and can also be used in fx build.
Modifying compiler flags
You can put custom compiler flags inside a GN config that is added to a
target. As a simple example:
config("everybody_loops") {
rustflags = [ "-Zeverybody-loops" ]
}
rustc_binary("example") {
crate_root = "src/bin.rs"
# ...existing keys here...
configs += [ ":everybody_loops" ]
}
This will add the flag -Zeverybody-loops to rustc when building the example
target. Note that you can also use public_configs for a config to be added
to every target that depends on that target.
If you want to add a flag to every Rust target in the build, you can add
rustflags to the //build/config:compiler config or to the OS-specific
configs referenced in that file. Note that cflags and ldflags are ignored on
Rust targets.
Running ninja and rustc commands directly
Going down one layer, fx build invokes ninja, which in turn eventually
invokes rustc. All build actions are run inside the out directory, which is
usually out/default inside the Fuchsia checkout.
You can get ninja to print the actual command it invokes by forcing that command to fail, e.g. by adding a syntax error to one of the source files of the target. Once you have the command, you can run it from inside the output directory.
After changing the toolchain itself, the build setting rustc_version_string in
out/default/args.gn needs to be changed so that fx build or ninja will
rebuild all the Rust targets. This can be done in a text editor and the contents
of the string do not matter, as long as it changes from one build to the next.
build_fuchsia_from_rust_ci.sh does this for you by hashing the toolchain
directory.
The Fuchsia website has more detailed documentation of the build system.
Other tips and tricks
When using build_fuchsia_from_rust_ci.sh you can comment out the fx set
command after the initial run so it won't rerun GN each time. If you do this you
can also comment out the version_string line to save a couple seconds.
export NINJA_PERSISTENT_MODE=1 to get faster ninja startup times after the
initial build.
Fuchsia target support
To learn more about Fuchsia target support, see the Fuchsia chapter in the rustc book.
As of June 2024, Fuchsia had about 2 million lines of first-party Rust code and a roughly equal amount of third-party code, as counted by tokei (excluding comments and blanks).
Rust for Linux integration tests
Rust for Linux (RfL) is an effort for adding support for the Rust programming language into the Linux kernel.
Building Rust for Linux in CI
Rust for Linux builds as part of the suite of bors tests that run before a pull request is merged.
The workflow builds a stage1 sysroot of the Rust compiler, downloads the Linux kernel, and tries to compile several Rust for Linux drivers and examples using this sysroot. RfL uses several unstable compiler/language features, therefore this workflow notifies us if a given compiler change would break it.
If you are worried that a pull request might break the Rust for Linux builder and want to test it out before submitting it to the bors queue, simply add this line to your PR description:
try-job: x86_64-rust-for-linux
Then when you @bors try it will pick the job that builds the Rust for Linux
integration.
What to do in case of failure
If a PR breaks the Rust for Linux CI job, then:
- If the breakage was unintentional and seems spurious, then let RfL
know and retry.
- If the PR is urgent and retrying doesn't fix it, then disable the CI job
temporarily (comment out the
image: x86_64-rust-for-linuxjob insrc/ci/github-actions/jobs.yml).
- If the PR is urgent and retrying doesn't fix it, then disable the CI job
temporarily (comment out the
- If the breakage was unintentional, then change the PR to resolve the breakage.
- If the breakage was intentional, then let RfL know and discuss
what will the kernel need to change.
- If the PR is urgent, then disable the CI job temporarily (comment out
the
image: x86_64-rust-for-linuxjob insrc/ci/github-actions/jobs.yml). - If the PR can wait a few days, then wait for RfL maintainers to provide a
new Linux kernel commit hash with the needed changes done, and apply it to
the PR, which would confirm the changes work (update the
LINUX_VERSIONenvironment variable insrc/ci/docker/scripts/rfl-build.sh).
- If the PR is urgent, then disable the CI job temporarily (comment out
the
If you need to contact the RfL developers, you can ping the Rust for Linux ping group to ask for help:
@rustbot ping rfl
Performance testing
rustc-perf
A lot of work is put into improving the performance of the compiler and preventing performance regressions.
The rustc-perf project provides
several services for testing and tracking performance. It provides hosted
infrastructure for running benchmarks as a service. At this time, only
x86_64-unknown-linux-gnu builds are tracked.
A "perf run" is used to compare the performance of the compiler in different configurations for a large collection of popular crates. Different configurations include "fresh builds", builds with incremental compilation, etc.
The result of a perf run is a comparison between two versions of the compiler (by their commit hashes).
You can also use rustc-perf to manually benchmark and profile the compiler
locally.
Automatic perf runs
After every PR is merged, a suite of benchmarks are run against the compiler. The results are tracked over time on the https://perf.rust-lang.org/ website. Any changes are noted in a comment on the PR.
Manual perf runs
Additionally, performance tests can be ran before a PR is merged on an as-needed basis. You should request a perf run if your PR may affect performance, especially if it can affect performance adversely.
To evaluate the performance impact of a PR, write this comment on the PR:
@bors try @rust-timer queue
Note: Only users authorized to do perf runs are allowed to post this comment. Teams that are allowed to use it are tracked in the Teams repository with the
perf = truevalue in the[permissions]section (and bors permissions are also required). If you are not on one of those teams, feel free to ask for someone to post it for you (either on Zulip or ask the assigned reviewer).
This will first tell bors to do a "try" build which do a full release build for
x86_64-unknown-linux-gnu. After the build finishes, it will place it in the
queue to run the performance suite against it. After the performance tests
finish, the bot will post a comment on the PR with a summary and a link to a
full report.
If you want to do a perf run for an already built artifact (e.g. for a previous try build that wasn't benchmarked yet), you can run this instead:
@rust-timer build <commit-sha>
You cannot benchmark the same artifact twice though.
More information about the available perf bot commands can be found here.
More details about the benchmarking process itself are available in the perf collector documentation.
Suggest tests tool
This chapter is about the internals of and contribution instructions for the
suggest-tests tool. For a high-level overview of the tool, see this
section. This tool is currently in a beta
state and is tracked by this
issue on Github. Currently the number of tests it will suggest are very limited
in scope, we are looking to expand this (contributions welcome!).
Internals
The tool is defined in a separate crate
(src/tools/suggest-tests)
which outputs suggestions which are parsed by a shim in bootstrap
(src/bootstrap/src/core/build_steps/suggest.rs).
The only notable thing the bootstrap shim does is (when invoked with the --run
flag) use bootstrap's internal mechanisms to create a new Builder and uses it
to invoke the suggested commands. The suggest-tests crate is where the fun
happens, two kinds of suggestions are defined: "static" and "dynamic"
suggestions.
Static suggestions
Defined
here.
Static suggestions are simple: they are just
globs which map to a x command. In
suggest-tests, this is implemented with a simple macro_rules macro.
Dynamic suggestions
Defined
here.
These are more complicated than static suggestions and are implemented as
functions with the following signature: fn(&Path) -> Vec<Suggestion>. In other
words, each suggestion takes a path to a modified file and (after running
arbitrary Rust code) can return any number of suggestions, or none. Dynamic
suggestions are useful for situations where fine-grained control over
suggestions is needed. For example, modifications to the compiler/xyz/ path
should trigger the x test compiler/xyz suggestion. In the future, dynamic
suggestions might even read file contents to determine if (what) tests should
run.
Adding a suggestion
The following steps should serve as a rough guide to add suggestions to
suggest-tests (very welcome!):
- Determine the rules for your suggestion. Is it simple and operates only on a single path or does it match globs? Does it need fine-grained control over the resulting command or does "one size fit all"?
- Based on the previous step, decide if your suggestion should be implemented as either static or dynamic.
- Implement the suggestion. If it is dynamic then a test is highly recommended, to verify that your logic is correct and to give an example of the suggestion. See the tests.rs file.
- Open a PR implementing your suggestion. (TODO: add example PR)
Debugging the compiler
- Configuring the compiler
- Suppressing the ICE file
- Getting a backtrace
-Zflags- Getting logging output
- Narrowing (Bisecting) Regressions
- Downloading Artifacts from Rust's CI
#[rustc_*]TEST attributes- Configuring CodeLLDB for debugging
rustc
This chapter contains a few tips to debug the compiler. These tips aim to be useful no matter what you are working on. Some of the other chapters have advice about specific parts of the compiler (e.g. the Queries Debugging and Testing chapter or the LLVM Debugging chapter).
Configuring the compiler
By default, rustc is built without most debug information. To enable debug info,
set debug = true in your config.toml.
Setting debug = true turns on many different debug options (e.g., debug-assertions,
debug-logging, etc.) which can be individually tweaked if you want to, but many people
simply set debug = true.
If you want to use GDB to debug rustc, please set config.toml with options:
[rust]
debug = true
debuginfo-level = 2
NOTE: This will use a lot of disk space (upwards of 35GB), and will take a lot more compile time. With
debuginfo-level = 1(the default whendebug = true), you will be able to track the execution path, but will lose the symbol information for debugging.
The default configuration will enable symbol-mangling-version v0.
This requires at least GDB v10.2,
otherwise you need to disable new symbol-mangling-version in config.toml.
[rust]
new-symbol-mangling = false
See the comments in
config.example.tomlfor more info.
You will need to rebuild the compiler after changing any configuration option.
Suppressing the ICE file
By default, if rustc encounters an Internal Compiler Error (ICE) it will dump the ICE contents to an
ICE file within the current working directory named rustc-ice-<timestamp>-<pid>.txt. If this is
not desirable, you can prevent the ICE file from being created with RUSTC_ICE=0.
Getting a backtrace
When you have an ICE (panic in the compiler), you can set
RUST_BACKTRACE=1 to get the stack trace of the panic! like in
normal Rust programs. IIRC backtraces don't work on MinGW,
sorry. If you have trouble or the backtraces are full of unknown,
you might want to find some way to use Linux, Mac, or MSVC on Windows.
In the default configuration (without debug set to true), you don't have line numbers
enabled, so the backtrace looks like this:
stack backtrace:
0: std::sys::imp::backtrace::tracing::imp::unwind_backtrace
1: std::sys_common::backtrace::_print
2: std::panicking::default_hook::{{closure}}
3: std::panicking::default_hook
4: std::panicking::rust_panic_with_hook
5: std::panicking::begin_panic
(~~~~ LINES REMOVED BY ME FOR BREVITY ~~~~)
32: rustc_typeck::check_crate
33: <std::thread::local::LocalKey<T>>::with
34: <std::thread::local::LocalKey<T>>::with
35: rustc::ty::context::TyCtxt::create_and_enter
36: rustc_driver::driver::compile_input
37: rustc_driver::run_compiler
If you set debug = true, you will get line numbers for the stack trace.
Then the backtrace will look like this:
stack backtrace:
(~~~~ LINES REMOVED BY ME FOR BREVITY ~~~~)
at /home/user/rust/compiler/rustc_typeck/src/check/cast.rs:110
7: rustc_typeck::check::cast::CastCheck::check
at /home/user/rust/compiler/rustc_typeck/src/check/cast.rs:572
at /home/user/rust/compiler/rustc_typeck/src/check/cast.rs:460
at /home/user/rust/compiler/rustc_typeck/src/check/cast.rs:370
(~~~~ LINES REMOVED BY ME FOR BREVITY ~~~~)
33: rustc_driver::driver::compile_input
at /home/user/rust/compiler/rustc_driver/src/driver.rs:1010
at /home/user/rust/compiler/rustc_driver/src/driver.rs:212
34: rustc_driver::run_compiler
at /home/user/rust/compiler/rustc_driver/src/lib.rs:253
-Z flags
The compiler has a bunch of -Z * flags. These are unstable flags that are only
enabled on nightly. Many of them are useful for debugging. To get a full listing
of -Z flags, use -Z help.
One useful flag is -Z verbose-internals, which generally enables printing more
info that could be useful for debugging.
Right below you can find elaborate explainers on a selected few.
Getting a backtrace for errors
If you want to get a backtrace to the point where the compiler emits an
error message, you can pass the -Z treat-err-as-bug=n, which will make
the compiler panic on the nth error. If you leave off =n, the compiler will
assume 1 for n and thus panic on the first error it encounters.
For example:
$ cat error.rs
fn main() { 1 + (); }
$ rustc +stage1 error.rs
error[E0277]: cannot add `()` to `{integer}`
--> error.rs:2:7
|
2 | 1 + ();
| ^ no implementation for `{integer} + ()`
|
= help: the trait `Add<()>` is not implemented for `{integer}`
error: aborting due to previous error
Now, where does the error above come from?
$ RUST_BACKTRACE=1 rustc +stage1 error.rs -Z treat-err-as-bug
error[E0277]: the trait bound `{integer}: std::ops::Add<()>` is not satisfied
--> error.rs:2:7
|
2 | 1 + ();
| ^ no implementation for `{integer} + ()`
|
= help: the trait `std::ops::Add<()>` is not implemented for `{integer}`
error: internal compiler error: unexpected panic
note: the compiler unexpectedly panicked. this is a bug.
note: we would appreciate a bug report: https://github.com/rust-lang/rust/blob/master/CONTRIBUTING.md#bug-reports
note: rustc 1.24.0-dev running on x86_64-unknown-linux-gnu
note: run with `RUST_BACKTRACE=1` for a backtrace
thread 'rustc' panicked at 'encountered error with `-Z treat_err_as_bug',
/home/user/rust/compiler/rustc_errors/src/lib.rs:411:12
note: Some details are omitted, run with `RUST_BACKTRACE=full` for a verbose
backtrace.
stack backtrace:
(~~~ IRRELEVANT PART OF BACKTRACE REMOVED BY ME ~~~)
7: rustc::traits::error_reporting::<impl rustc::infer::InferCtxt<'a, 'tcx>>
::report_selection_error
at /home/user/rust/compiler/rustc_middle/src/traits/error_reporting.rs:823
8: rustc::traits::error_reporting::<impl rustc::infer::InferCtxt<'a, 'tcx>>
::report_fulfillment_errors
at /home/user/rust/compiler/rustc_middle/src/traits/error_reporting.rs:160
at /home/user/rust/compiler/rustc_middle/src/traits/error_reporting.rs:112
9: rustc_typeck::check::FnCtxt::select_obligations_where_possible
at /home/user/rust/compiler/rustc_typeck/src/check/mod.rs:2192
(~~~ IRRELEVANT PART OF BACKTRACE REMOVED BY ME ~~~)
36: rustc_driver::run_compiler
at /home/user/rust/compiler/rustc_driver/src/lib.rs:253
Cool, now I have a backtrace for the error!
Debugging delayed bugs
The -Z eagerly-emit-delayed-bugs option makes it easy to debug delayed bugs.
It turns them into normal errors, i.e. makes them visible. This can be used in
combination with -Z treat-err-as-bug to stop at a particular delayed bug and
get a backtrace.
Getting the error creation location
-Z track-diagnostics can help figure out where errors are emitted. It uses #[track_caller]
for this and prints its location alongside the error:
$ RUST_BACKTRACE=1 rustc +stage1 error.rs -Z track-diagnostics
error[E0277]: cannot add `()` to `{integer}`
--> src\error.rs:2:7
|
2 | 1 + ();
| ^ no implementation for `{integer} + ()`
-Ztrack-diagnostics: created at compiler/rustc_trait_selection/src/traits/error_reporting/mod.rs:638:39
|
= help: the trait `Add<()>` is not implemented for `{integer}`
= help: the following other types implement trait `Add<Rhs>`:
<&'a f32 as Add<f32>>
<&'a f64 as Add<f64>>
<&'a i128 as Add<i128>>
<&'a i16 as Add<i16>>
<&'a i32 as Add<i32>>
<&'a i64 as Add<i64>>
<&'a i8 as Add<i8>>
<&'a isize as Add<isize>>
and 48 others
For more information about this error, try `rustc --explain E0277`.
This is similar but different to -Z treat-err-as-bug:
- it will print the locations for all errors emitted
- it does not require a compiler built with debug symbols
- you don't have to read through a big stack trace.
Getting logging output
The compiler uses the tracing crate for logging.
For details see the guide section on tracing
Narrowing (Bisecting) Regressions
The cargo-bisect-rustc tool can be used as a quick and easy way to
find exactly which PR caused a change in rustc behavior. It automatically
downloads rustc PR artifacts and tests them against a project you provide
until it finds the regression. You can then look at the PR to get more context
on why it was changed. See this tutorial on how to use
it.
Downloading Artifacts from Rust's CI
The rustup-toolchain-install-master tool by kennytm can be used to
download the artifacts produced by Rust's CI for a specific SHA1 -- this
basically corresponds to the successful landing of some PR -- and then sets
them up for your local use. This also works for artifacts produced by @bors try. This is helpful when you want to examine the resulting build of a PR
without doing the build yourself.
#[rustc_*] TEST attributes
The compiler defines a whole lot of internal (perma-unstable) attributes some of which are useful
for debugging by dumping extra compiler-internal information. These are prefixed with rustc_ and
are gated behind the internal feature rustc_attrs (enabled via e.g. #![feature(rustc_attrs)]).
For a complete and up to date list, see builtin_attrs. More specifically, the ones marked TEST.
Here are some notable ones:
| Attribute | Description |
|---|---|
rustc_def_path | Dumps the def_path_str of an item. |
rustc_dump_def_parents | Dumps the chain of DefId parents of certain definitions. |
rustc_dump_item_bounds | Dumps the item_bounds of an item. |
rustc_dump_predicates | Dumps the predicates_of an item. |
rustc_dump_vtable | |
rustc_hidden_type_of_opaques | Dumps the hidden type of each opaque types in the crate. |
rustc_layout | See this section. |
rustc_object_lifetime_default | Dumps the object lifetime defaults of an item. |
rustc_outlives | Dumps implied bounds of an item. More precisely, the inferred_outlives_of an item. |
rustc_regions | Dumps NLL closure region requirements. |
rustc_symbol_name | Dumps the mangled & demangled symbol_name of an item. |
rustc_variances | Dumps the variances of an item. |
Right below you can find elaborate explainers on a selected few.
Formatting Graphviz output (.dot files)
Some compiler options for debugging specific features yield graphviz graphs -
e.g. the #[rustc_mir(borrowck_graphviz_postflow="suffix.dot")] attribute
dumps various borrow-checker dataflow graphs.
These all produce .dot files. To view these files, install graphviz (e.g.
apt-get install graphviz) and then run the following commands:
$ dot -T pdf maybe_init_suffix.dot > maybe_init_suffix.pdf
$ firefox maybe_init_suffix.pdf # Or your favorite pdf viewer
Debugging type layouts
The internal attribute #[rustc_layout] can be used to dump the Layout of
the type it is attached to. For example:
#![allow(unused)] #![feature(rustc_attrs)] fn main() { #[rustc_layout(debug)] type T<'a> = &'a u32; }
Will emit the following:
error: layout_of(&'a u32) = Layout {
fields: Primitive,
variants: Single {
index: 0,
},
abi: Scalar(
Scalar {
value: Pointer,
valid_range: 1..=18446744073709551615,
},
),
largest_niche: Some(
Niche {
offset: Size {
raw: 0,
},
scalar: Scalar {
value: Pointer,
valid_range: 1..=18446744073709551615,
},
},
),
align: AbiAndPrefAlign {
abi: Align {
pow2: 3,
},
pref: Align {
pow2: 3,
},
},
size: Size {
raw: 8,
},
}
--> src/lib.rs:4:1
|
4 | type T<'a> = &'a u32;
| ^^^^^^^^^^^^^^^^^^^^^
error: aborting due to previous error
Configuring CodeLLDB for debugging rustc
If you are using VSCode, and have edited your config.toml to request debugging
level 1 or 2 for the parts of the code you're interested in, then you should be
able to use the CodeLLDB extension in VSCode to debug it.
Here is a sample launch.json file, being used to run a stage 1 compiler direct
from the directory where it is built (does not have to be "installed"):
// .vscode/launch.json
{
"version": "0.2.0",
"configurations": [
{
"type": "lldb",
"request": "launch",
"name": "Launch",
"args": [], // array of string command-line arguments to pass to compiler
"program": "${workspaceFolder}/build/host/stage1/bin/rustc",
"windows": { // applicable if using windows
"program": "${workspaceFolder}/build/host/stage1/bin/rustc.exe"
},
"cwd": "${workspaceFolder}", // current working directory at program start
"stopOnEntry": false,
"sourceLanguages": ["rust"]
}
]
}
Using tracing to debug the compiler
- Function level filters
- Query level filters
- Broad module level filters
- Log colors
- How to keep or remove
debug!andtrace!calls from the resulting binary - Logging etiquette and conventions
The compiler has a lot of debug! (or trace!) calls, which print out logging information
at many points. These are very useful to at least narrow down the location of
a bug if not to find it entirely, or just to orient yourself as to why the
compiler is doing a particular thing.
To see the logs, you need to set the RUSTC_LOG environment variable to your
log filter. The full syntax of the log filters can be found in the rustdoc
of tracing-subscriber.
Function level filters
Lots of functions in rustc are annotated with
#[instrument(level = "debug", skip(self))]
fn foo(&self, bar: Type) {}
which allows you to use
RUSTC_LOG=[foo]
to do the following all at once
- log all function calls to
foo - log the arguments (except for those in the
skiplist) - log everything (from anywhere else in the compiler) until the function returns
I don't want everything
Depending on the scope of the function, you may not want to log everything in its body.
As an example: the do_mir_borrowck function will dump hundreds of lines even for trivial
code being borrowchecked.
Since you can combine all filters, you can add a crate/module path, e.g.
RUSTC_LOG=rustc_borrowck[do_mir_borrowck]
I don't want all calls
If you are compiling libcore, you likely don't want all borrowck dumps, but only one for a specific function. You can filter function calls by their arguments by regexing them.
RUSTC_LOG=[do_mir_borrowck{id=\.\*from_utf8_unchecked\.\*}]
will only give you the logs of borrowchecking from_utf8_unchecked. Note that you will
still get a short message per ignored do_mir_borrowck, but none of the things inside those
calls. This helps you in looking through the calls that are happening and helps you adjust
your regex if you mistyped it.
Query level filters
Every query is automatically tagged with a logging span so that you can display all log messages during the execution of the query. For example, if you want to log everything during type checking:
RUSTC_LOG=[typeck]
The query arguments are included as a tracing field which means that you can
filter on the debug display of the arguments. For example, the typeck query
has an argument key: LocalDefId of what is being checked. You can use a
regex to match on that LocalDefId to log type checking for a specific
function:
RUSTC_LOG=[typeck{key=.*name_of_item.*}]
Different queries have different arguments. You can find a list of queries and
their arguments in
rustc_middle/src/query/mod.rs.
Broad module level filters
You can also use filters similar to the log crate's filters, which will enable
everything within a specific module. This is often too verbose and too unstructured,
so it is recommended to use function level filters.
Your log filter can be just debug to get all debug! output and
higher (e.g., it will also include info!), or path::to::module to get all
output (which will include trace!) from a particular module, or
path::to::module=debug to get debug! output and higher from a particular
module.
For example, to get the debug! output and higher for a specific module, you
can run the compiler with RUSTC_LOG=path::to::module=debug rustc my-file.rs.
All debug! output will then appear in standard error.
Note that you can use a partial path and the filter will still work. For
example, if you want to see info! output from only
rustdoc::passes::collect_intra_doc_links, you could use
RUSTDOC_LOG=rustdoc::passes::collect_intra_doc_links=info or you could use
RUSTDOC_LOG=rustdoc::passes::collect_intra=info.
If you are developing rustdoc, use RUSTDOC_LOG instead. If you are developing
Miri, use MIRI_LOG instead. You get the idea :)
See the tracing crate's docs, and specifically the docs for debug! to
see the full syntax you can use. (Note: unlike the compiler, the tracing
crate and its examples use the RUST_LOG environment variable. rustc, rustdoc,
and other tools set custom environment variables.)
Note that unless you use a very strict filter, the logger will emit a lot of output, so use the most specific module(s) you can (comma-separated if multiple). It's typically a good idea to pipe standard error to a file and look at the log output with a text editor.
So, to put it together:
# This puts the output of all debug calls in `rustc_middle/src/traits` into
# standard error, which might fill your console backscroll.
$ RUSTC_LOG=rustc_middle::traits=debug rustc +stage1 my-file.rs
# This puts the output of all debug calls in `rustc_middle/src/traits` in
# `traits-log`, so you can then see it with a text editor.
$ RUSTC_LOG=rustc_middle::traits=debug rustc +stage1 my-file.rs 2>traits-log
# Not recommended! This will show the output of all `debug!` calls
# in the Rust compiler, and there are a *lot* of them, so it will be
# hard to find anything.
$ RUSTC_LOG=debug rustc +stage1 my-file.rs 2>all-log
# This will show the output of all `info!` calls in `rustc_codegen_ssa`.
#
# There's an `info!` statement in `codegen_instance` that outputs
# every function that is codegen'd. This is useful to find out
# which function triggers an LLVM assertion, and this is an `info!`
# log rather than a `debug!` log so it will work on the official
# compilers.
$ RUSTC_LOG=rustc_codegen_ssa=info rustc +stage1 my-file.rs
# This will show all logs in `rustc_codegen_ssa` and `rustc_resolve`.
$ RUSTC_LOG=rustc_codegen_ssa,rustc_resolve rustc +stage1 my-file.rs
# This will show the output of all `info!` calls made by rustdoc
# or any rustc library it calls.
$ RUSTDOC_LOG=info rustdoc +stage1 my-file.rs
# This will only show `debug!` calls made by rustdoc directly,
# not any `rustc*` crate.
$ RUSTDOC_LOG=rustdoc=debug rustdoc +stage1 my-file.rs
Log colors
By default, rustc (and other tools, like rustdoc and Miri) will be smart about
when to use ANSI colors in the log output. If they are outputting to a terminal,
they will use colors, and if they are outputting to a file or being piped
somewhere else, they will not. However, it's hard to read log output in your
terminal unless you have a very strict filter, so you may want to pipe the
output to a pager like less. But then there won't be any colors, which makes
it hard to pick out what you're looking for!
You can override whether to have colors in log output with the RUSTC_LOG_COLOR
environment variable (or RUSTDOC_LOG_COLOR for rustdoc, or MIRI_LOG_COLOR
for Miri, etc.). There are three options: auto (the default), always, and
never. So, if you want to enable colors when piping to less, use something
similar to this command:
# The `-R` switch tells less to print ANSI colors without escaping them.
$ RUSTC_LOG=debug RUSTC_LOG_COLOR=always rustc +stage1 ... | less -R
Note that MIRI_LOG_COLOR will only color logs that come from Miri, not logs
from rustc functions that Miri calls. Use RUSTC_LOG_COLOR to color logs from
rustc.
How to keep or remove debug! and trace! calls from the resulting binary
While calls to error!, warn! and info! are included in every build of the compiler,
calls to debug! and trace! are only included in the program if
debug-logging=true is turned on in config.toml (it is
turned off by default), so if you don't see DEBUG logs, especially
if you run the compiler with RUSTC_LOG=rustc rustc some.rs and only see
INFO logs, make sure that debug-logging=true is turned on in your
config.toml.
Logging etiquette and conventions
Because calls to debug! are removed by default, in most cases, don't worry
about the performance of adding "unnecessary" calls to debug! and leaving them in code you
commit - they won't slow down the performance of what we ship.
That said, there can also be excessive tracing calls, especially
when they are redundant with other calls nearby or in functions called from
here. There is no perfect balance to hit here, and is left to the reviewer's
discretion to decide whether to let you leave debug! statements in or whether to ask
you to remove them before merging.
It may be preferable to use trace! over debug! for very noisy logs.
A loosely followed convention is to use #[instrument(level = "debug")]
(also see the attribute's documentation)
in favour of debug!("foo(...)") at the start of a function foo.
Within functions, prefer debug!(?variable.field) over debug!("xyz = {:?}", variable.field)
and debug!(bar = ?var.method(arg)) over debug!("bar = {:?}", var.method(arg)).
The documentation for this syntax can be found here.
One thing to be careful of is expensive operations in logs.
If in the module rustc::foo you have a statement
debug!(x = ?random_operation(tcx));
Then if someone runs a debug rustc with RUSTC_LOG=rustc::foo, then
random_operation() will run. RUSTC_LOG filters that do not enable this
debug statement will not execute random_operation.
This means that you should not put anything too expensive or likely to crash there - that would annoy anyone who wants to use logging for that module. No-one will know it until someone tries to use logging to find another bug.
Profiling the compiler
This section talks about how to profile the compiler and find out where it spends its time.
Depending on what you're trying to measure, there are several different approaches:
-
If you want to see if a PR improves or regresses compiler performance, see the rustc-perf chapter for requesting a benchmarking run.
-
If you want a medium-to-high level overview of where
rustcis spending its time:- The
-Z self-profileflag and measureme tools offer a query-based approach to profiling. See their docs for more information.
- The
-
If you want function level performance data or even just more details than the above approaches:
-
If you want a nice visual representation of the compile times of your crate graph, you can use cargo's
--timingsflag, e.g.cargo build --timings. You can use this flag on the compiler itself withCARGOFLAGS="--timings" ./x build -
If you want to profile memory usage, you can use various tools depending on what operating system you are using.
- For Windows, read our WPA guide.
Optimizing rustc's bootstrap times with cargo-llvm-lines
Using cargo-llvm-lines you can count the number of lines of LLVM IR across all instantiations of a generic function. Since most of the time compiling rustc is spent in LLVM, the idea is that by reducing the amount of code passed to LLVM, compiling rustc gets faster.
To use cargo-llvm-lines together with somewhat custom rustc build process, you can use
-C save-temps to obtain required LLVM IR. The option preserves temporary work products
created during compilation. Among those is LLVM IR that represents an input to the
optimization pipeline; ideal for our purposes. It is stored in files with *.no-opt.bc
extension in LLVM bitcode format.
Example usage:
cargo install cargo-llvm-lines
# On a normal crate you could now run `cargo llvm-lines`, but `x` isn't normal :P
# Do a clean before every run, to not mix in the results from previous runs.
./x clean
env RUSTFLAGS=-Csave-temps ./x build --stage 0 compiler/rustc
# Single crate, e.g., rustc_middle. (Relies on the glob support of your shell.)
# Convert unoptimized LLVM bitcode into a human readable LLVM assembly accepted by cargo-llvm-lines.
for f in build/x86_64-unknown-linux-gnu/stage0-rustc/x86_64-unknown-linux-gnu/release/deps/rustc_middle-*.no-opt.bc; do
./build/x86_64-unknown-linux-gnu/llvm/bin/llvm-dis "$f"
done
cargo llvm-lines --files ./build/x86_64-unknown-linux-gnu/stage0-rustc/x86_64-unknown-linux-gnu/release/deps/rustc_middle-*.ll > llvm-lines-middle.txt
# Specify all crates of the compiler.
for f in build/x86_64-unknown-linux-gnu/stage0-rustc/x86_64-unknown-linux-gnu/release/deps/*.no-opt.bc; do
./build/x86_64-unknown-linux-gnu/llvm/bin/llvm-dis "$f"
done
cargo llvm-lines --files ./build/x86_64-unknown-linux-gnu/stage0-rustc/x86_64-unknown-linux-gnu/release/deps/*.ll > llvm-lines.txt
Example output for the compiler:
Lines Copies Function name
----- ------ -------------
45207720 (100%) 1583774 (100%) (TOTAL)
2102350 (4.7%) 146650 (9.3%) core::ptr::drop_in_place
615080 (1.4%) 8392 (0.5%) std::thread::local::LocalKey<T>::try_with
594296 (1.3%) 1780 (0.1%) hashbrown::raw::RawTable<T>::rehash_in_place
592071 (1.3%) 9691 (0.6%) core::option::Option<T>::map
528172 (1.2%) 5741 (0.4%) core::alloc::layout::Layout::array
466854 (1.0%) 8863 (0.6%) core::ptr::swap_nonoverlapping_one
412736 (0.9%) 1780 (0.1%) hashbrown::raw::RawTable<T>::resize
367776 (0.8%) 2554 (0.2%) alloc::raw_vec::RawVec<T,A>::grow_amortized
367507 (0.8%) 643 (0.0%) rustc_query_system::dep_graph::graph::DepGraph<K>::with_task_impl
355882 (0.8%) 6332 (0.4%) alloc::alloc::box_free
354556 (0.8%) 14213 (0.9%) core::ptr::write
354361 (0.8%) 3590 (0.2%) core::iter::traits::iterator::Iterator::fold
347761 (0.8%) 3873 (0.2%) rustc_middle::ty::context::tls::set_tlv
337534 (0.7%) 2377 (0.2%) alloc::raw_vec::RawVec<T,A>::allocate_in
331690 (0.7%) 3192 (0.2%) hashbrown::raw::RawTable<T>::find
328756 (0.7%) 3978 (0.3%) rustc_middle::ty::context::tls::with_context_opt
326903 (0.7%) 642 (0.0%) rustc_query_system::query::plumbing::try_execute_query
Since this doesn't seem to work with incremental compilation or ./x check,
you will be compiling rustc a lot.
I recommend changing a few settings in config.toml to make it bearable:
[rust]
# A debug build takes _a third_ as long on my machine,
# but compiling more than stage0 rustc becomes unbearably slow.
optimize = false
# We can't use incremental anyway, so we disable it for a little speed boost.
incremental = false
# We won't be running it, so no point in compiling debug checks.
debug = false
# Using a single codegen unit gives less output, but is slower to compile.
codegen-units = 0 # num_cpus
The llvm-lines output is affected by several options.
optimize = false increases it from 2.1GB to 3.5GB and codegen-units = 0 to 4.1GB.
MIR optimizations have little impact. Compared to the default RUSTFLAGS="-Z mir-opt-level=1", level 0 adds 0.3GB and level 2 removes 0.2GB.
As of July 2022,
inlining happens in LLVM and GCC codegen backends,
missing only in the Cranelift one.
Profiling with perf
This is a guide for how to profile rustc with perf.
Initial steps
- Get a clean checkout of rust-lang/master, or whatever it is you want to profile.
- Set the following settings in your
config.toml:debuginfo-level = 1- enables line debuginfojemalloc = false- lets you do memory use profiling with valgrind- leave everything else the defaults
- Run
./x buildto get a full build - Make a rustup toolchain pointing to that result
Gathering a perf profile
perf is an excellent tool on linux that can be used to gather and analyze all kinds of information. Mostly it is used to figure out where a program spends its time. It can also be used for other sorts of events, though, like cache misses and so forth.
The basics
The basic perf command is this:
perf record -F99 --call-graph dwarf XXX
The -F99 tells perf to sample at 99 Hz, which avoids generating too
much data for longer runs (why 99 Hz you ask? It is often chosen
because it is unlikely to be in lockstep with other periodic
activity). The --call-graph dwarf tells perf to get call-graph
information from debuginfo, which is accurate. The XXX is the
command you want to profile. So, for example, you might do:
perf record -F99 --call-graph dwarf cargo +<toolchain> rustc
to run cargo -- here <toolchain> should be the name of the toolchain
you made in the beginning. But there are some things to be aware of:
- You probably don't want to profile the time spend building
dependencies. So something like
cargo build; cargo clean -p $Cmay be helpful (where$Cis the crate name)- Though usually I just do
touch src/lib.rsand rebuild instead. =)
- Though usually I just do
- You probably don't want incremental messing about with your
profile. So something like
CARGO_INCREMENTAL=0can be helpful.
Gathering a perf profile from a perf.rust-lang.org test
Often we want to analyze a specific test from perf.rust-lang.org.
The easiest way to do that is to use the rustc-perf
benchmarking suite, this approach is described here.
Instead of using the benchmark suite CLI, you can also profile the benchmarks manually. First, you need to clone the rustc-perf repository:
$ git clone https://github.com/rust-lang/rustc-perf
and then find the source code of the test that you want to profile. Sources for the tests
are found in the collector/compile-benchmarks directory
and the collector/runtime-benchmarks directory. So let's
go into the directory of a specific test; we'll use clap-rs as an example:
cd collector/compile-benchmarks/clap-3.1.6
In this case, let's say we want to profile the cargo check
performance. In that case, I would first run some basic commands to
build the dependencies:
# Setup: first clean out any old results and build the dependencies:
cargo +<toolchain> clean
CARGO_INCREMENTAL=0 cargo +<toolchain> check
(Again, <toolchain> should be replaced with the name of the
toolchain we made in the first step.)
Next: we want record the execution time for just the clap-rs crate,
running cargo check. I tend to use cargo rustc for this, since it
also allows me to add explicit flags, which we'll do later on.
touch src/lib.rs
CARGO_INCREMENTAL=0 perf record -F99 --call-graph dwarf cargo rustc --profile check --lib
Note that final command: it's a doozy! It uses the cargo rustc
command, which executes rustc with (potentially) additional options;
the --profile check and --lib options specify that we are doing a
cargo check execution, and that this is a library (not a binary).
At this point, we can use perf tooling to analyze the results. For example:
perf report
will open up an interactive TUI program. In simple cases, that can be
helpful. For more detailed examination, the perf-focus tool
can be helpful; it is covered below.
A note of caution. Each of the rustc-perf tests is its own special
snowflake. In particular, some of them are not libraries, in which
case you would want to do touch src/main.rs and avoid passing
--lib. I'm not sure how best to tell which test is which to be
honest.
Gathering NLL data
If you want to profile an NLL run, you can just pass extra options to
the cargo rustc command, like so:
touch src/lib.rs
CARGO_INCREMENTAL=0 perf record -F99 --call-graph dwarf cargo rustc --profile check --lib -- -Z borrowck=mir
Analyzing a perf profile with perf focus
Once you've gathered a perf profile, we want to get some information about it. For this, I personally use perf focus. It's a kind of simple but useful tool that lets you answer queries like:
- "how much time was spent in function F" (no matter where it was called from)
- "how much time was spent in function F when it was called from G"
- "how much time was spent in function F excluding time spent in G"
- "what functions does F call and how much time does it spend in them"
To understand how it works, you have to know just a bit about
perf. Basically, perf works by sampling your process on a regular
basis (or whenever some event occurs). For each sample, perf gathers a
backtrace. perf focus lets you write a regular expression that tests
which functions appear in that backtrace, and then tells you which
percentage of samples had a backtrace that met the regular
expression. It's probably easiest to explain by walking through how I
would analyze NLL performance.
Installing perf-focus
You can install perf-focus using cargo install:
cargo install perf-focus
Example: How much time is spent in MIR borrowck?
Let's say we've gathered the NLL data for a test. We'd like to know
how much time it is spending in the MIR borrow-checker. The "main"
function of the MIR borrowck is called do_mir_borrowck, so we can do
this command:
$ perf focus '{do_mir_borrowck}'
Matcher : {do_mir_borrowck}
Matches : 228
Not Matches: 542
Percentage : 29%
The '{do_mir_borrowck}' argument is called the matcher. It
specifies the test to be applied on the backtrace. In this case, the
{X} indicates that there must be some function on the backtrace
that meets the regular expression X. In this case, that regex is
just the name of the function we want (in fact, it's a subset of the name;
the full name includes a bunch of other stuff, like the module
path). In this mode, perf-focus just prints out the percentage of
samples where do_mir_borrowck was on the stack: in this case, 29%.
A note about c++filt. To get the data from perf, perf focus
currently executes perf script (perhaps there is a better
way...). I've sometimes found that perf script outputs C++ mangled
names. This is annoying. You can tell by running perf script | head yourself — if you see names like 5rustc6middle instead of
rustc::middle, then you have the same problem. You can solve this
by doing:
perf script | c++filt | perf focus --from-stdin ...
This will pipe the output from perf script through c++filt and
should mostly convert those names into a more friendly format. The
--from-stdin flag to perf focus tells it to get its data from
stdin, rather than executing perf focus. We should make this more
convenient (at worst, maybe add a c++filt option to perf focus, or
just always use it — it's pretty harmless).
Example: How much time does MIR borrowck spend solving traits?
Perhaps we'd like to know how much time MIR borrowck spends in the trait checker. We can ask this using a more complex regex:
$ perf focus '{do_mir_borrowck}..{^rustc::traits}'
Matcher : {do_mir_borrowck},..{^rustc::traits}
Matches : 12
Not Matches: 1311
Percentage : 0%
Here we used the .. operator to ask "how often do we have
do_mir_borrowck on the stack and then, later, some function whose
name begins with rustc::traits?" (basically, code in that module). It
turns out the answer is "almost never" — only 12 samples fit that
description (if you ever see no samples, that often indicates your
query is messed up).
If you're curious, you can find out exactly which samples by using the
--print-match option. This will print out the full backtrace for
each sample. The | at the front of the line indicates the part that
the regular expression matched.
Example: Where does MIR borrowck spend its time?
Often we want to do more "explorational" queries. Like, we know that
MIR borrowck is 29% of the time, but where does that time get spent?
For that, the --tree-callees option is often the best tool. You
usually also want to give --tree-min-percent or
--tree-max-depth. The result looks like this:
$ perf focus '{do_mir_borrowck}' --tree-callees --tree-min-percent 3
Matcher : {do_mir_borrowck}
Matches : 577
Not Matches: 746
Percentage : 43%
Tree
| matched `{do_mir_borrowck}` (43% total, 0% self)
: | rustc_borrowck::nll::compute_regions (20% total, 0% self)
: : | rustc_borrowck::nll::type_check::type_check_internal (13% total, 0% self)
: : : | core::ops::function::FnOnce::call_once (5% total, 0% self)
: : : : | rustc_borrowck::nll::type_check::liveness::generate (5% total, 3% self)
: : : | <rustc_borrowck::nll::type_check::TypeVerifier<'a, 'b, 'tcx> as rustc::mir::visit::Visitor<'tcx>>::visit_mir (3% total, 0% self)
: | rustc::mir::visit::Visitor::visit_mir (8% total, 6% self)
: | <rustc_borrowck::MirBorrowckCtxt<'cx, 'tcx> as rustc_mir_dataflow::DataflowResultsConsumer<'cx, 'tcx>>::visit_statement_entry (5% total, 0% self)
: | rustc_mir_dataflow::do_dataflow (3% total, 0% self)
What happens with --tree-callees is that
- we find each sample matching the regular expression
- we look at the code that occurs after the regex match and try to build up a call tree
The --tree-min-percent 3 option says "only show me things that take
more than 3% of the time. Without this, the tree often gets really
noisy and includes random stuff like the innards of
malloc. --tree-max-depth can be useful too, it just limits how many
levels we print.
For each line, we display the percent of time in that function altogether ("total") and the percent of time spent in just that function and not some callee of that function (self). Usually "total" is the more interesting number, but not always.
Relative percentages
By default, all in perf-focus are relative to the total program execution. This is useful to help you keep perspective — often as we drill down to find hot spots, we can lose sight of the fact that, in terms of overall program execution, this "hot spot" is actually not important. It also ensures that percentages between different queries are easily compared against one another.
That said, sometimes it's useful to get relative percentages, so perf focus offers a --relative option. In this case, the percentages are
listed only for samples that match (vs all samples). So for example we
could get our percentages relative to the borrowck itself
like so:
$ perf focus '{do_mir_borrowck}' --tree-callees --relative --tree-max-depth 1 --tree-min-percent 5
Matcher : {do_mir_borrowck}
Matches : 577
Not Matches: 746
Percentage : 100%
Tree
| matched `{do_mir_borrowck}` (100% total, 0% self)
: | rustc_borrowck::nll::compute_regions (47% total, 0% self) [...]
: | rustc::mir::visit::Visitor::visit_mir (19% total, 15% self) [...]
: | <rustc_borrowck::MirBorrowckCtxt<'cx, 'tcx> as rustc_mir_dataflow::DataflowResultsConsumer<'cx, 'tcx>>::visit_statement_entry (13% total, 0% self) [...]
: | rustc_mir_dataflow::do_dataflow (8% total, 1% self) [...]
Here you see that compute_regions came up as "47% total" — that
means that 47% of do_mir_borrowck is spent in that function. Before,
we saw 20% — that's because do_mir_borrowck itself is only 43% of
the total time (and .47 * .43 = .20).
Profiling on Windows
Introducing WPR and WPA
High-level performance analysis (including memory usage) can be performed with the Windows Performance Recorder (WPR) and Windows Performance Analyzer (WPA). As the names suggest, WPR is for recording system statistics (in the form of event trace log a.k.a. ETL files), while WPA is for analyzing these ETL files.
WPR collects system wide statistics, so it won't just record things relevant to rustc but also everything else that's running on the machine. During analysis, we can filter to just the things we find interesting.
These tools are quite powerful but also require a bit of learning before we can successfully profile the Rust compiler.
Here we will explore how to use WPR and WPA for analyzing the Rust compiler as well as provide links to useful "profiles" (i.e., settings files that tweak the defaults for WPR and WPA) that are specifically designed to make analyzing rustc easier.
Installing WPR and WPA
You can install WPR and WPA as part of the Windows Performance Toolkit which itself is an option as part of downloading the Windows Assessment and Deployment Kit (ADK). You can download the ADK installer here. Make sure to select the Windows Performance Toolkit (you don't need to select anything else).
Recording
In order to perform system analysis, you'll first need to record your system with WPR. Open WPR and at the bottom of the window select the "profiles" of the things you want to record. For looking into memory usage of the rustc bootstrap process, we'll want to select the following items:
- CPU usage
- VirtualAlloc usage
You might be tempted to record "Heap usage" as well, but this records every single heap allocation and can be very, very expensive. For high-level analysis, it might be best to leave that turned off.
Now we need to get our setup ready to record. For memory usage analysis, it is best to record the stage 2 compiler build with a stage 1 compiler build with debug symbols. Having symbols in the compiler we're using to build rustc will aid our analysis greatly by allowing WPA to resolve Rust symbols correctly. Unfortunately, the stage 0 compiler does not have symbols turned on which is why we'll need to build a stage 1 compiler and then a stage 2 compiler ourselves.
To do this, make sure you have set debuginfo-level = 1 in your config.toml file. This tells
rustc to generate debug information which includes stack frames when bootstrapping.
Now you can build the stage 1 compiler: x build --stage 1 -i library or however
else you want to build the stage 1 compiler.
Now that the stage 1 compiler is built, we can record the stage 2 build. Go back to WPR, click the
"start" button and build the stage 2 compiler (e.g., x build --stage=2 -i library).
When this process finishes, stop the recording.
Click the Save button and once that process is complete, click the "Open in WPA" button which appears.
Note: The trace file is fairly large so it can take WPA some time to finish opening the file.
Analysis
Now that our ETL file is open in WPA, we can analyze the results. First, we'll want to apply the pre-made "profile" which will put WPA into a state conducive to analyzing rustc bootstrap. Download the profile here. Select the "Profiles" menu at the top, then "apply" and then choose the downloaded profile.
You should see something resembling the following:
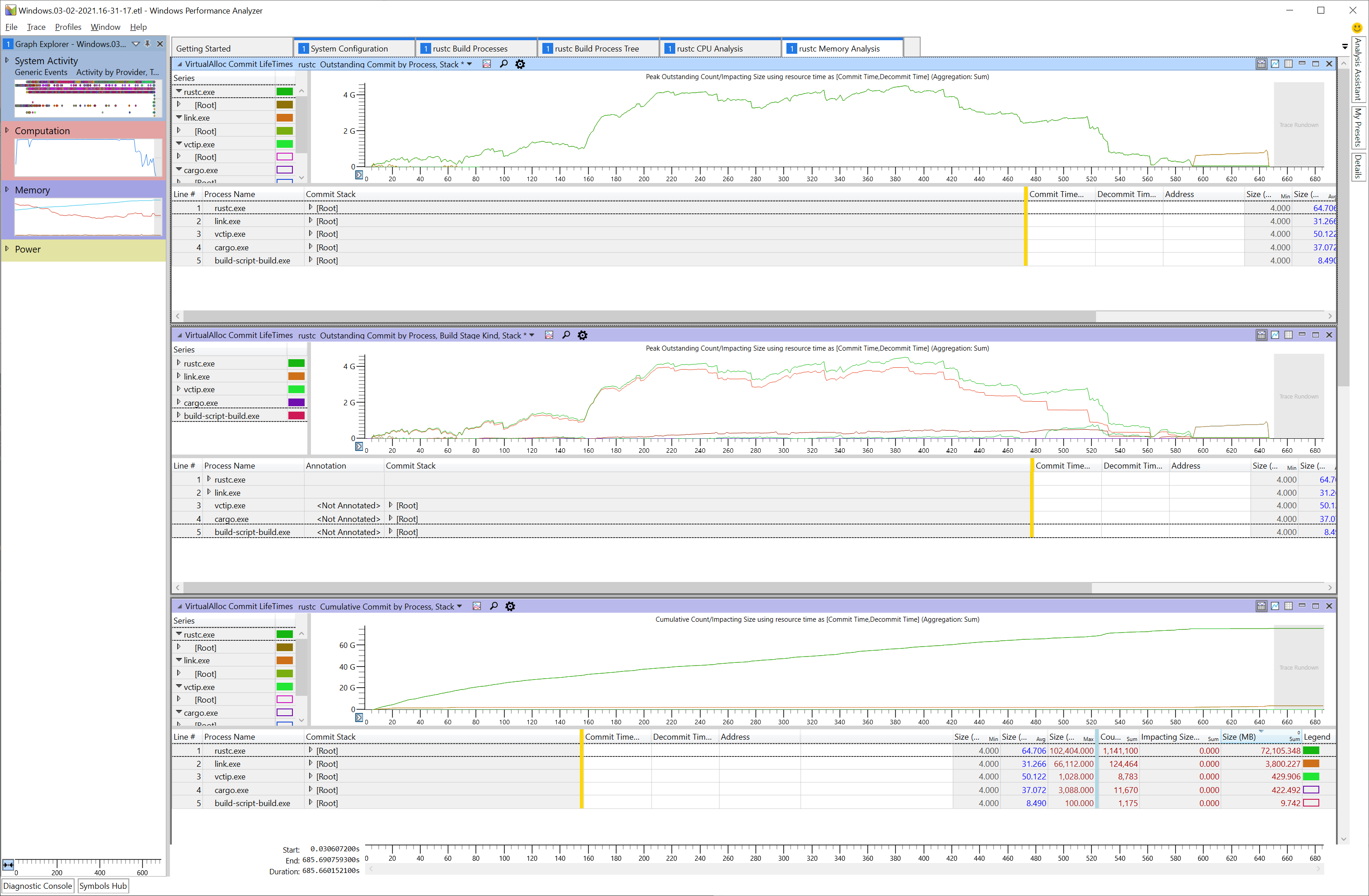
Next, we will need to tell WPA to load and process debug symbols so that it can properly demangle the Rust stack traces. To do this, click "Trace" and then choose "Load Symbols". This step can take a while.
Once WPA has loaded symbols for rustc, we can expand the rustc.exe node and begin drilling down into the stack with the largest allocations.
To do that, we'll expand the [Root] node in the "Commit Stack" column and continue expanding
until we find interesting stack frames.
Tip: After selecting the node you want to expand, press the right arrow key. This will expand the node and put the selection on the next largest node in the expanded set. You can continue pressing the right arrow key until you reach an interesting frame.

In this sample, you can see calls through codegen are allocating ~30gb of memory in total throughout this profile.
Other Analysis Tabs
The profile also includes a few other tabs which can be helpful:
- System Configuration
- General information about the system the capture was recorded on.
- rustc Build Processes
- A flat list of relevant processes such as rustc.exe, cargo.exe, link.exe etc.
- Each process lists its command line arguments.
- Useful for figuring out what a specific rustc process was working on.
- rustc Build Process Tree
- Timeline showing when processes started and exited.
- rustc CPU Analysis
- Contains charts preconfigured to show hotspots in rustc.
- These charts are designed to support analyzing where rustc is spending its time.
- rustc Memory Analysis
- Contains charts preconfigured to show where rustc is allocating memory.
Profiling with rustc-perf
The Rust benchmark suite provides a comprehensive way of profiling and benchmarking the Rust compiler. You can find instructions on how to use the suite in its manual.
However, using the suite manually can be a bit cumbersome. To make this easier for rustc contributors,
the compiler build system (bootstrap) also provides built-in integration with the benchmarking suite,
which will download and build the suite for you, build a local compiler toolchain and let you profile it using a simplified command-line interface.
You can use the ./x perf -- <command> [options] command to use this integration.
Note that you need to specify arguments after
--in thex perfcommand! You will not be able to pass arguments without the double dashes.
You can use normal bootstrap flags for this command, such as --stage 1 or --stage 2, for example to modify the stage of the created sysroot. It might also be useful to configure config.toml to better support profiling, e.g. set rust.debuginfo-level = 1 to add source line information to the built compiler.
x perf currently supports the following commands:
benchmark <id>: Benchmark the compiler and store the results under the passedid.compare <baseline> <modified>: Compare the benchmark results of two compilers with the two passedids.eprintln: Just run the compiler and capture itsstderroutput. Note that the compiler normally does not print anything tostderr, you might want to add someeprintln!calls to get any output.samply: Profile the compiler using the samply sampling profiler.cachegrind: Use Cachegrind to generate a detailed simulated trace of the compiler's execution.
You can find a more detailed description of the profilers in the
rustc-perfmanual.
You can use the following options for the x perf command, which mirror the corresponding options of the
profile_local and bench_local commands that you can use in the suite:
--include: Select benchmarks which should be profiled/benchmarked.--profiles: Select profiles (Check,Debug,Opt,Doc) which should be profiled/benchmarked.--scenarios: Select scenarios (Full,IncrFull,IncrPatched,IncrUnchanged) which should be profiled/benchmarked.
crates.io Dependencies
The Rust compiler supports building with some dependencies from crates.io.
Examples are log and env_logger.
In general, you should avoid adding dependencies to the compiler for several reasons:
- The dependency may not be of high quality or well-maintained.
- The dependency may not be using a compatible license.
- The dependency may have transitive dependencies that have one of the above problems.
Note that there is no official policy for vetting new dependencies to the compiler. Decisions are made on a case-by-case basis, during code review.
Permitted dependencies
The tidy tool has a list of crates that are allowed. To add a
dependency that is not already in the compiler, you will need to add it to the list.
Contribution Procedures
- Bug reports
- Bug fixes or "normal" code changes
- New features
- Pull requests
- External dependencies
- Writing documentation
- Issue triage
- Helpful links and information
Bug reports
While bugs are unfortunate, they're a reality in software. We can't fix what we don't know about, so please report liberally. If you're not sure if something is a bug or not, feel free to file a bug anyway.
If you believe reporting your bug publicly represents a security risk to Rust users, please follow our instructions for reporting security vulnerabilities.
If you're using the nightly channel, please check if the bug exists in the latest toolchain before filing your bug. It might be fixed already.
If you have the chance, before reporting a bug, please search existing issues, as it's possible that someone else has already reported your error. This doesn't always work, and sometimes it's hard to know what to search for, so consider this extra credit. We won't mind if you accidentally file a duplicate report.
Similarly, to help others who encountered the bug find your issue, consider filing an issue with a descriptive title, which contains information that might be unique to it. This can be the language or compiler feature used, the conditions that trigger the bug, or part of the error message if there is any. An example could be: "impossible case reached" on lifetime inference for impl Trait in return position.
Opening an issue is as easy as following this link and filling out the fields in the appropriate provided template.
Bug fixes or "normal" code changes
For most PRs, no special procedures are needed. You can just open a PR, and it will be reviewed, approved, and merged. This includes most bug fixes, refactorings, and other user-invisible changes. The next few sections talk about exceptions to this rule.
Also, note that it is perfectly acceptable to open WIP PRs or GitHub Draft PRs. Some people prefer to do this so they can get feedback along the way or share their code with a collaborator. Others do this so they can utilize the CI to build and test their PR (e.g. when developing on a slow machine).
New features
Rust has strong backwards-compatibility guarantees. Thus, new features can't just be implemented directly in stable Rust. Instead, we have 3 release channels: stable, beta, and nightly.
- Stable: this is the latest stable release for general usage.
- Beta: this is the next release (will be stable within 6 weeks).
- Nightly: follows the
masterbranch of the repo. This is the only channel where unstable, incomplete, or experimental features are usable with feature gates.
See this chapter on implementing new features for more information.
Breaking changes
Breaking changes have a dedicated section in the dev-guide.
Major changes
The compiler team has a special process for large changes, whether or not they cause breakage. This process is called a Major Change Proposal (MCP). MCP is a relatively lightweight mechanism for getting feedback on large changes to the compiler (as opposed to a full RFC or a design meeting with the team).
Example of things that might require MCPs include major refactorings, changes to important types, or important changes to how the compiler does something, or smaller user-facing changes.
When in doubt, ask on zulip. It would be a shame to put a lot of work into a PR that ends up not getting merged! See this document for more info on MCPs.
Performance
Compiler performance is important. We have put a lot of effort over the last few years into gradually improving it.
If you suspect that your change may cause a performance regression (or improvement), you can request a "perf run" (and your reviewer may also request one before approving). This is yet another bot that will compile a collection of benchmarks on a compiler with your changes. The numbers are reported here, and you can see a comparison of your changes against the latest master.
For an introduction to the performance of Rust code in general which would also be useful in rustc development, see The Rust Performance Book.
Pull requests
Pull requests (or PRs for short) are the primary mechanism we use to change Rust. GitHub itself has some great documentation on using the Pull Request feature. We use the "fork and pull" model described here, where contributors push changes to their personal fork and create pull requests to bring those changes into the source repository. We have more info about how to use git when contributing to Rust under the git section.
Advice for potentially large, complex, cross-cutting and/or very domain-specific changes
The compiler reviewers on rotation usually each have areas of the compiler that they know well, but also have areas that they are not very familiar with. If your PR contains changes that are large, complex, cross-cutting and/or highly domain-specific, it becomes very difficult to find a suitable reviewer who is comfortable in reviewing all of the changes in such a PR. This is also true if the changes are not only compiler-specific but also contains changes which fall under the purview of reviewers from other teams, like the standard library team. There's a bot which notifies the relevant teams and pings people who have setup specific alerts based on the files modified.
Before making such changes, you are strongly encouraged to discuss your proposed changes with the compiler team beforehand (and with other teams that the changes would require approval from), and work with the compiler team to see if we can help you break down a large potentially unreviewable PR into a series of smaller more individually reviewable PRs.
You can communicate with the compiler team by creating a #t-compiler thread on zulip to discuss your proposed changes.
Communicating with the compiler team beforehand helps in several ways:
- It increases the likelihood of your PRs being reviewed in a timely manner.
- We can help you identify suitable reviewers before you open actual PRs, or help find advisors and liaisons to help you navigate the change procedures, or help with running try-jobs, perf runs and crater runs as suitable.
- It helps the compiler team track your changes.
- The compiler team can perform vibe checks on your changes early and often, to see if the direction of the changes align with what the compiler team prefers to see.
- Helps to avoid situations where you may have invested significant time and effort into large changes that the compiler team might not be willing to accept, or finding out very late that the changes are in a direction that the compiler team disagrees with.
r?
All pull requests are reviewed by another person. We have a bot, @rustbot, that will automatically assign a random person to review your request based on which files you changed.
If you want to request that a specific person reviews your pull request, you
can add an r? to the pull request description or in a comment. For example,
if you want to ask a review to @awesome-reviewer, add
r? @awesome-reviewer
to the end of the pull request description, and @rustbot will assign them instead of a random person. This is entirely optional.
You can also assign a random reviewer from a specific team by writing r? rust-lang/groupname.
As an example,
if you were making a diagnostics change,
then you could get a reviewer from the diagnostics team by adding:
r? rust-lang/diagnostics
For a full list of possible groupnames,
check the adhoc_groups section at the triagebot.toml config file,
or the list of teams in the rust-lang teams database.
Waiting for reviews
NOTE
Pull request reviewers are often working at capacity, and many of them are contributing on a volunteer basis. In order to minimize review delays, pull request authors and assigned reviewers should ensure that the review label (
S-waiting-on-reviewandS-waiting-on-author) stays updated, invoking these commands when appropriate:
@rustbot author: the review is finished, and PR author should check the comments and take action accordingly.
@rustbot review: the author is ready for a review, and this PR will be queued again in the reviewer's queue.
Please note that the reviewers are humans, who for the most part work on rustc
in their free time. This means that they can take some time to respond and review
your PR. It also means that reviewers can miss some PRs that are assigned to them.
To try to move PRs forward, the Triage WG regularly goes through all PRs that are waiting for review and haven't been discussed for at least 2 weeks. If you don't get a review within 2 weeks, feel free to ask the Triage WG on Zulip (#t-release/triage). They have knowledge of when to ping, who might be on vacation, etc.
The reviewer may request some changes using the GitHub code review interface. They may also request special procedures for some PRs. See Crater and Breaking Changes chapters for some examples of such procedures.
CI
In addition to being reviewed by a human, pull requests are automatically tested, thanks to continuous integration (CI). Basically, every time you open and update a pull request, CI builds the compiler and tests it against the compiler test suite, and also performs other tests such as checking that your pull request is in compliance with Rust's style guidelines.
Running continuous integration tests allows PR authors to catch mistakes early without going through a first review cycle, and also helps reviewers stay aware of the status of a particular pull request.
Rust has plenty of CI capacity, and you should never have to worry about wasting
computational resources each time you push a change. It is also perfectly fine
(and even encouraged!) to use the CI to test your changes if it can help your
productivity. In particular, we don't recommend running the full ./x test suite locally,
since it takes a very long time to execute.
r+
After someone has reviewed your pull request, they will leave an annotation
on the pull request with an r+. It will look something like this:
@bors r+
This tells @bors, our lovable integration bot, that your pull request has
been approved. The PR then enters the merge queue, where @bors
will run all the tests on every platform we support. If it all works out,
@bors will merge your code into master and close the pull request.
Depending on the scale of the change, you may see a slightly different form of r+:
@bors r+ rollup
The additional rollup tells @bors that this change should always be "rolled up".
Changes that are rolled up are tested and merged alongside other PRs, to
speed the process up. Typically only small changes that are expected not to conflict
with one another are marked as "always roll up".
Be patient; this can take a while and the queue can sometimes be long. PRs are never merged by hand.
Opening a PR
You are now ready to file a pull request? Great! Here are a few points you should be aware of.
All pull requests should be filed against the master branch,
unless you know for sure that you should target a different branch.
Make sure your pull request is in compliance with Rust's style guidelines by running
$ ./x test tidy --bless
We recommend to make this check before every pull request (and every new commit in a pull request); you can add git hooks before every push to make sure you never forget to make this check. The CI will also run tidy and will fail if tidy fails.
Rust follows a no merge-commit policy, meaning, when you encounter merge
conflicts you are expected to always rebase instead of merging. E.g. always use
rebase when bringing the latest changes from the master branch to your feature
branch. If your PR contains merge commits, it will get marked as has-merge-commits.
Once you have removed the merge commits, e.g., through an interactive rebase, you
should remove the label again:
@rustbot label -has-merge-commits
See this chapter for more details.
If you encounter merge conflicts or when a reviewer asks you to perform some
changes, your PR will get marked as S-waiting-on-author. When you resolve
them, you should use @rustbot to mark it as S-waiting-on-review:
@rustbot ready
GitHub allows closing issues using keywords. This feature should be used to keep the issue tracker tidy. However, it is generally preferred to put the "closes #123" text in the PR description rather than the issue commit; particularly during rebasing, citing the issue number in the commit can "spam" the issue in question.
However, if your PR fixes a stable-to-beta or stable-to-stable regression and has
been accepted for a beta and/or stable backport (i.e., it is marked beta-accepted
and/or stable-accepted), please do not use any such keywords since we don't
want the corresponding issue to get auto-closed once the fix lands on master.
Please update the PR description while still mentioning the issue somewhere.
For example, you could write Fixes (after beta backport) #NNN..
As for further actions, please keep a sharp look-out for a PR whose title begins with
[beta] or [stable] and which backports the PR in question. When that one gets
merged, the relevant issue can be closed. The closing comment should mention all
PRs that were involved. If you don't have the permissions to close the issue, please
leave a comment on the original PR asking the reviewer to close it for you.
Reverting a PR
When a PR leads to miscompile, significant performance regressions, or other critical issues, we may want to revert that PR with a regression test case. You can also check out the revert policy on Forge docs (which is mainly targeted for reviewers, but contains useful info for PR authors too).
If the PR contains huge changes, it can be challenging to revert, making it harder to review incremental fixes in subsequent updates. Or if certain code in that PR is heavily depended upon by subsequent PRs, reverting it can become difficult.
In such cases, we can identify the problematic code and disable it for some input, as shown in #128271.
For MIR optimizations, we can also use the -Zunsound-mir-opt option to gate the mir-opt, as shown
in #132356.
External dependencies
This section has moved to "Using External Repositories".
Writing documentation
Documentation improvements are very welcome. The source of doc.rust-lang.org
is located in src/doc in the tree, and standard API documentation is generated
from the source code itself (e.g. library/std/src/lib.rs). Documentation pull requests
function in the same way as other pull requests.
To find documentation-related issues, sort by the A-docs label.
You can find documentation style guidelines in RFC 1574.
To build the standard library documentation, use x doc --stage 0 library --open.
To build the documentation for a book (e.g. the unstable book), use x doc src/doc/unstable-book.
Results should appear in build/host/doc, as well as automatically open in your default browser.
See Building Documentation for more
information.
You can also use rustdoc directly to check small fixes. For example,
rustdoc src/doc/reference.md will render reference to doc/reference.html.
The CSS might be messed up, but you can verify that the HTML is right.
Contributing to rustc-dev-guide
Contributions to the rustc-dev-guide are always welcome, and can be made directly at the rust-lang/rustc-dev-guide repo. The issue tracker in that repo is also a great way to find things that need doing. There are issues for beginners and advanced compiler devs alike!
Just a few things to keep in mind:
-
Please try to avoid overly long lines and use semantic line breaks (where you break the line after each sentence). There is no strict limit on line lengths; let the sentence or part of the sentence flow to its proper end on the same line.
-
When contributing text to the guide, please contextualize the information with some time period and/or a reason so that the reader knows how much to trust or mistrust the information. Aim to provide a reasonable amount of context, possibly including but not limited to:
-
A reason for why the data may be out of date other than "change", as change is a constant across the project.
-
The date the comment was added, e.g. instead of writing "Currently, ..." or "As of now, ...", consider adding the date, in one of the following formats:
- Jan 2021
- January 2021
- jan 2021
- january 2021
There is a CI action (in
~/.github/workflows/date-check.yml) that generates a monthly showing those that are over 6 months old (example).For the action to pick the date, add a special annotation before specifying the date:
<!-- date-check --> Sep 2024Example:
As of <!-- date-check --> Sep 2024, the foo did the bar.For cases where the date should not be part of the visible rendered output, use the following instead:
<!-- date-check: Sep 2024 --> -
A link to a relevant WG, tracking issue,
rustcrustdoc page, or similar, that may provide further explanation for the change process or a way to verify that the information is not outdated.
-
-
If a text grows rather long (more than a few page scrolls) or complicated (more than four subsections), it might benefit from having a Table of Contents at the beginning, which you can auto-generate by including the
<!-- toc -->marker at the top.
Issue triage
Sometimes, an issue will stay open, even though the bug has been fixed. And sometimes, the original bug may go stale because something has changed in the meantime.
It can be helpful to go through older bug reports and make sure that they are still valid. Load up an older issue, double check that it's still true, and leave a comment letting us know if it is or is not. The least recently updated sort is good for finding issues like this.
Thanks to @rustbot, anyone can help triage issues by adding
appropriate labels to issues that haven't been triaged yet:
| Labels | Color | Description |
|---|---|---|
| A- | Yellow | The area of the project an issue relates to. |
| B- | Magenta | Issues which are blockers. |
| beta- | Dark Blue | Tracks changes which need to be backported to beta |
| C- | Light Purple | The category of an issue. |
| D- | Mossy Green | Issues for diagnostics. |
| E- | Green | The experience level necessary to fix an issue. |
| F- | Peach | Issues for nightly features. |
| I- | Red | The importance of the issue. |
| I-*-nominated | Red | The issue has been nominated for discussion at the next meeting of the corresponding team. |
| I-prioritize | Red | The issue has been nominated for prioritization by the team tagged with a T-prefixed label. |
| L- | Teal | The relevant lint. |
| metabug | Purple | Bugs that collect other bugs. |
| O- | Purple Grey | The operating system or platform that the issue is specific to. |
| P- | Orange | The issue priority. These labels can be assigned by anyone that understand the issue and is able to prioritize it, and remove the I-prioritize label. |
| regression- | Pink | Tracks regressions from a stable release. |
| relnotes | Light Orange | Changes that should be documented in the release notes of the next release. |
| S- | Gray | Tracks the status of pull requests. |
| S-tracking- | Steel Blue | Tracks the status of tracking issues. |
| stable- | Dark Blue | Tracks changes which need to be backported to stable in anticipation of a point release. |
| T- | Blue | Denotes which team the issue belongs to. |
| WG- | Green | Denotes which working group the issue belongs to. |
Rfcbot labels
rfcbot uses its own labels for tracking the process of coordinating asynchronous decisions, such as approving or rejecting a change. This is used for RFCs, issues, and pull requests.
| Labels | Color | Description |
|---|---|---|
| proposed-final-comment-period | Gray | Currently awaiting signoff of all team members in order to enter the final comment period. |
| disposition-merge | Green | Indicates the intent is to merge the change. |
| disposition-close | Red | Indicates the intent is to not accept the change and close it. |
| disposition-postpone | Gray | Indicates the intent is to not accept the change at this time and postpone it to a later date. |
| final-comment-period | Blue | Currently soliciting final comments before merging or closing. |
| finished-final-comment-period | Light Yellow | The final comment period has concluded, and the issue will be merged or closed. |
| postponed | Yellow | The issue has been postponed. |
| closed | Red | The issue has been rejected. |
| to-announce | Gray | Issues that have finished their final-comment-period and should be publicly announced. Note: the rust-lang/rust repository uses this label differently, to announce issues at the triage meetings. |
Helpful links and information
This section has moved to the "About this guide" chapter.
About the compiler team
rustc is maintained by the Rust compiler team. The people who belong to this team collectively work to track regressions and implement new features. Members of the Rust compiler team are people who have made significant contributions to rustc and its design.
Discussion
Currently the compiler team chats in Zulip:
- Team chat occurs in the
t-compilerstream on the Zulip instance - There are also a number of other associated Zulip streams,
such as
t-compiler/help, where people can ask for help with rustc development, ort-compiler/meetings, where the team holds their weekly triage and steering meetings.
Reviewers
If you're interested in figuring out who can answer questions about a particular part of the compiler, or you'd just like to know who works on what, check out triagebot.toml's assign section. It contains a listing of the various parts of the compiler and a list of people who are reviewers of each part.
Rust compiler meeting
The compiler team has a weekly meeting where we do triage and try to generally stay on top of new bugs, regressions, and discuss important things in general. They are held on Zulip. It works roughly as follows:
- Announcements, MCPs/FCPs, and WG-check-ins: We share some announcements with the rest of the team about important things we want everyone to be aware of. We also share the status of MCPs and FCPs and we use the opportunity to have a couple of WGs giving us an update about their work.
- Check for beta and stable nominations: These are nominations of things to backport to beta and stable respectively. We then look for new cases where the compiler broke previously working code in the wild. Regressions are important issues to fix, so it's likely that they are tagged as P-critical or P-high; the major exception would be bug fixes (though even there we often aim to give warnings first).
- Review P-critical and P-high bugs: P-critical and P-high bugs are those that are sufficiently important for us to actively track progress. P-critical and P-high bugs should ideally always have an assignee.
- Check S-waiting-on-team and I-nominated issues: These are issues where feedback from the team is desired.
- Look over the performance triage report: We check for PRs that made the performance worse and try to decide if it's worth reverting the performance regression or if the regression can be addressed in a future PR.
The meeting currently takes place on Thursdays at 10am Boston time (UTC-4 typically, but daylight savings time sometimes makes things complicated).
Team membership
Membership in the Rust team is typically offered when someone has been making significant contributions to the compiler for some time. Membership is both a recognition but also an obligation: compiler team members are generally expected to help with upkeep as well as doing reviews and other work.
If you are interested in becoming a compiler team member, the first thing to do is to start fixing some bugs, or get involved in a working group. One good way to find bugs is to look for open issues tagged with E-easy or E-mentor.
You can also dig through the graveyard of PRs that were closed due to inactivity, some of them may contain work that is still useful - refer to the associated issues, if any - and only needs some finishing touches for which the original author didn't have time.
r+ rights
Once you have made a number of individual PRs to rustc, we will often offer r+ privileges. This means that you have the right to instruct "bors" (the robot that manages which PRs get landed into rustc) to merge a PR (here are some instructions for how to talk to bors).
The guidelines for reviewers are as follows:
- You are always welcome to review any PR, regardless of who it is
assigned to. However, do not r+ PRs unless:
- You are confident in that part of the code.
- You are confident that nobody else wants to review it first.
- For example, sometimes people will express a desire to review a PR before it lands, perhaps because it touches a particularly sensitive part of the code.
- Always be polite when reviewing: you are a representative of the Rust project, so it is expected that you will go above and beyond when it comes to the Code of Conduct.
Reviewer rotation
Once you have r+ rights, you can also be added to the reviewer rotation.
triagebot is the bot that automatically assigns incoming PRs to reviewers.
If you are added, you will be randomly selected to review
PRs. If you find you are assigned a PR that you don't feel comfortable
reviewing, you can also leave a comment like r? @so-and-so to assign
to someone else — if you don't know who to request, just write r? @nikomatsakis for reassignment and @nikomatsakis will pick someone
for you.
Getting on the reviewer rotation is much appreciated as it lowers the review burden for all of us! However, if you don't have time to give people timely feedback on their PRs, it may be better that you don't get on the list.
Full team membership
Full team membership is typically extended once someone made many contributions to the Rust compiler over time, ideally (but not necessarily) to multiple areas. Sometimes this might be implementing a new feature, but it is also important — perhaps more important! — to have time and willingness to help out with general upkeep such as bugfixes, tracking regressions, and other less glamorous work.
Using Git
- Prerequisites
- Standard Process
- Troubleshooting git issues
- I made a merge commit by accident.
- I deleted my fork on GitHub!
- I changed a submodule by accident
- I see "error: cannot rebase" when I try to rebase
- I see 'Untracked Files: src/stdarch'?
- I see
<<< HEAD? - failed to push some refs
- Git is trying to rebase commits I didn't write?
- Quick note about submodules
- Rebasing and Conflicts
- Advanced Rebasing
- No-Merge Policy
- Tips for reviewing
- Git submodules
- Ignoring commits during
git blame
The Rust project uses Git to manage its source code. In order to contribute, you'll need some familiarity with its features so that your changes can be incorporated into the compiler.
The goal of this page is to cover some of the more common questions and problems new contributors face. Although some Git basics will be covered here, if you find that this is still a little too fast for you, it might make sense to first read some introductions to Git, such as the Beginner and Getting started sections of this tutorial from Atlassian. GitHub also provides documentation and guides for beginners, or you can consult the more in depth book from Git.
This guide is incomplete. If you run into trouble with git that this page doesn't help with, please open an issue so we can document how to fix it.
Prerequisites
We'll assume that you've installed Git, forked rust-lang/rust, and cloned the forked repo to your PC. We'll use the command line interface to interact with Git; there are also a number of GUIs and IDE integrations that can generally do the same things.
If you've cloned your fork, then you will be able to reference it with origin
in your local repo. It may be helpful to also set up a remote for the official
rust-lang/rust repo via
git remote add upstream https://github.com/rust-lang/rust.git
if you're using HTTPS, or
git remote add upstream [email protected]:rust-lang/rust.git
if you're using SSH.
NOTE: This page is dedicated to workflows for rust-lang/rust, but will likely be
useful when contributing to other repositories in the Rust project.
Standard Process
Below is the normal procedure that you're likely to use for most minor changes and PRs:
- Ensure that you're making your changes on top of master:
git checkout master. - Get the latest changes from the Rust repo:
git pull upstream master --ff-only. (see No-Merge Policy for more info about this). - Make a new branch for your change:
git checkout -b issue-12345-fix. - Make some changes to the repo and test them.
- Stage your changes via
git add src/changed/file.rs src/another/change.rsand then commit them withgit commit. Of course, making intermediate commits may be a good idea as well. Avoidgit add ., as it makes it too easy to unintentionally commit changes that should not be committed, such as submodule updates. You can usegit statusto check if there are any files you forgot to stage. - Push your changes to your fork:
git push --set-upstream origin issue-12345-fix(After adding commits, you can usegit pushand after rebasing or pulling-and-rebasing, you can usegit push --force-with-lease). - Open a PR from your fork to
rust-lang/rust's master branch.
If you end up needing to rebase and are hitting conflicts, see Rebasing. If you want to track upstream while working on long-running feature/issue, see Keeping things up to date.
If your reviewer requests changes, the procedure for those changes looks much the same, with some steps skipped:
- Ensure that you're making changes to the most recent version of your code:
git checkout issue-12345-fix. - Make, stage, and commit your additional changes just like before.
- Push those changes to your fork:
git push.
Troubleshooting git issues
You don't need to clone rust-lang/rust from scratch if it's out of date!
Even if you think you've messed it up beyond repair, there are ways to fix
the git state that don't require downloading the whole repository again.
Here are some common issues you might run into:
I made a merge commit by accident.
Git has two ways to update your branch with the newest changes: merging and rebasing.
Rust uses rebasing. If you make a merge commit, it's not too hard to fix:
git rebase -i upstream/master.
See Rebasing for more about rebasing.
I deleted my fork on GitHub!
This is not a problem from git's perspective. If you run git remote -v,
it will say something like this:
$ git remote -v
origin [email protected]:jyn514/rust.git (fetch)
origin [email protected]:jyn514/rust.git (push)
upstream https://github.com/rust-lang/rust (fetch)
upstream https://github.com/rust-lang/rust (fetch)
If you renamed your fork, you can change the URL like this:
git remote set-url origin <URL>
where the <URL> is your new fork.
I changed a submodule by accident
Usually people notice this when rustbot posts a comment on github that cargo has been modified:

You might also notice conflicts in the web UI:

The most common cause is that you rebased after a change and ran git add . without first running
x to update the submodules. Alternatively, you might have run cargo fmt instead of x fmt
and modified files in a submodule, then committed the changes.
To fix it, do the following things:
- See which commit has the accidental changes:
git log --stat -n1 src/tools/cargo - Revert the changes to that commit:
git checkout <my-commit>~ src/tools/cargo. Type~literally but replace<my-commit>with the output from step 1. - Tell git to commit the changes:
git commit --fixup <my-commit> - Repeat steps 1-3 for all the submodules you modified.
- If you modified the submodule in several different commits, you will need to repeat steps 1-3
for each commit you modified. You'll know when to stop when the
git logcommand shows a commit that's not authored by you.
- If you modified the submodule in several different commits, you will need to repeat steps 1-3
for each commit you modified. You'll know when to stop when the
- Squash your changes into the existing commits:
git rebase --autosquash -i upstream/master - Push your changes.
I see "error: cannot rebase" when I try to rebase
These are two common errors to see when rebasing:
error: cannot rebase: Your index contains uncommitted changes.
error: Please commit or stash them.
error: cannot rebase: You have unstaged changes.
error: Please commit or stash them.
(See https://git-scm.com/book/en/v2/Getting-Started-What-is-Git%3F#_the_three_states for the difference between the two.)
This means you have made changes since the last time you made a commit. To be able to rebase, either commit your changes, or make a temporary commit called a "stash" to have them still not be committed when you finish rebasing. You may want to configure git to make this "stash" automatically, which will prevent the "cannot rebase" error in nearly all cases:
git config --global rebase.autostash true
See https://git-scm.com/book/en/v2/Git-Tools-Stashing-and-Cleaning for more info about stashing.
I see 'Untracked Files: src/stdarch'?
This is left over from the move to the library/ directory.
Unfortunately, git rebase does not follow renames for submodules, so you
have to delete the directory yourself:
rm -r src/stdarch
I see <<< HEAD?
You were probably in the middle of a rebase or merge conflict. See
Conflicts for how to fix the conflict. If you don't care about the changes
and just want to get a clean copy of the repository back, you can use git reset:
# WARNING: this throws out any local changes you've made! Consider resolving the conflicts instead.
git reset --hard master
failed to push some refs
git push will not work properly and say something like this:
! [rejected] issue-xxxxx -> issue-xxxxx (non-fast-forward)
error: failed to push some refs to 'https://github.com/username/rust.git'
hint: Updates were rejected because the tip of your current branch is behind
hint: its remote counterpart. Integrate the remote changes (e.g.
hint: 'git pull ...') before pushing again.
hint: See the 'Note about fast-forwards' in 'git push --help' for details.
The advice this gives is incorrect! Because of Rust's
"no-merge" policy the merge commit created by git pull
will not be allowed in the final PR, in addition to defeating the point of the
rebase! Use git push --force-with-lease instead.
Git is trying to rebase commits I didn't write?
If you see many commits in your rebase list, or merge commits, or commits by other people that you
didn't write, it likely means you're trying to rebase over the wrong branch. For example, you may
have a rust-lang/rust remote upstream, but ran git rebase origin/master instead of git rebase upstream/master. The fix is to abort the rebase and use the correct branch instead:
git rebase --abort
git rebase -i upstream/master
Click here to see an example of rebasing over the wrong branch
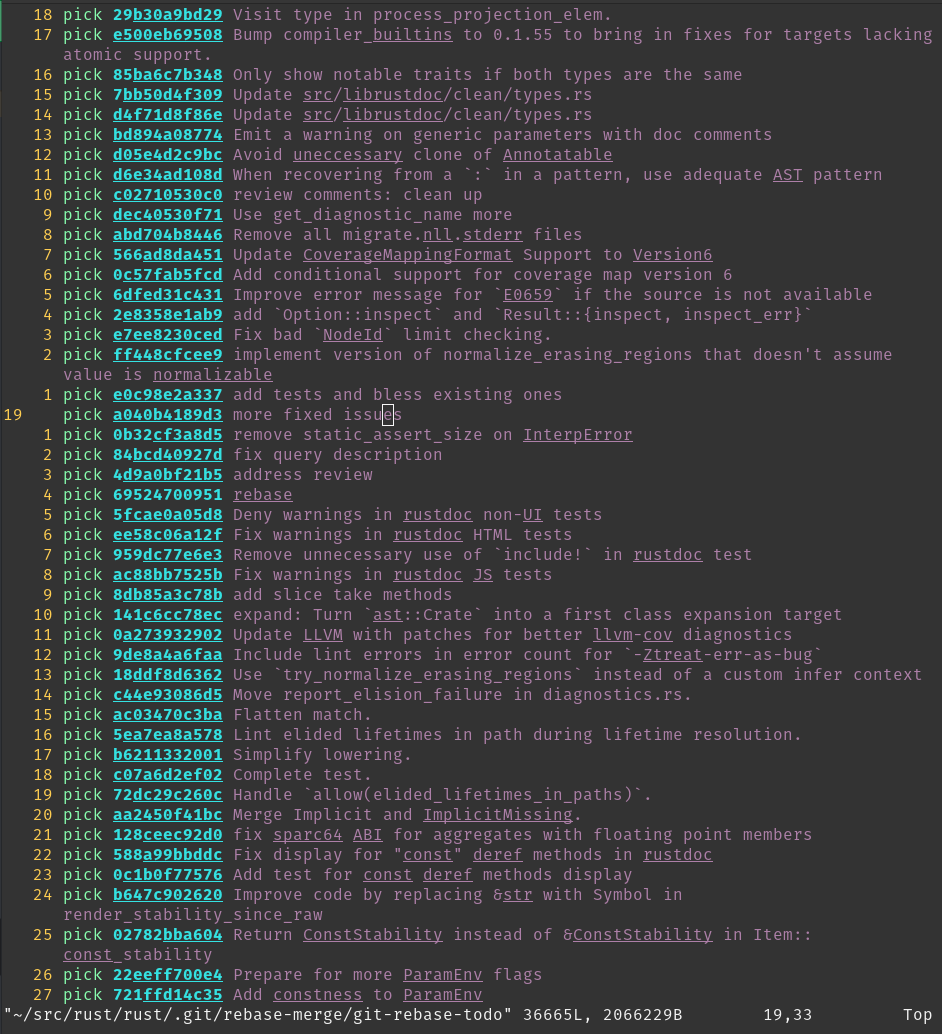
Quick note about submodules
When updating your local repository with git pull, you may notice that sometimes
Git says you have modified some files that you have never edited. For example,
running git status gives you something like (note the new commits mention):
On branch master
Your branch is up to date with 'origin/master'.
Changes not staged for commit:
(use "git add <file>..." to update what will be committed)
(use "git restore <file>..." to discard changes in working directory)
modified: src/llvm-project (new commits)
modified: src/tools/cargo (new commits)
no changes added to commit (use "git add" and/or "git commit -a")
These changes are not changes to files: they are changes to submodules (more on this
later). To get rid of those, run ./x --help, which will automatically update
the submodules.
Some submodules are not actually needed; for example, src/llvm-project doesn't need to be checked
out if you're using download-ci-llvm. To avoid having to keep fetching its history, you can use
git submodule deinit -f src/llvm-project, which will also avoid it showing as modified again.
Rebasing and Conflicts
When you edit your code locally, you are making changes to the version of rust-lang/rust that existed when you created your feature branch. As such, when you submit your PR it is possible that some of the changes that have been made to rust-lang/rust since then are in conflict with the changes you've made. When this happens, you need to resolve the conflicts before your changes can be merged. To do that, you need to rebase your work on top of rust-lang/rust.
Rebasing
To rebase your feature branch on top of the newest version of the master branch of rust-lang/rust, checkout your branch, and then run this command:
git pull --rebase https://github.com/rust-lang/rust.git master
If you are met with the following error:
error: cannot pull with rebase: Your index contains uncommitted changes. error: please commit or stash them.it means that you have some uncommitted work in your working tree. In that case, run
git stashbefore rebasing, and thengit stash popafter you have rebased and fixed all conflicts.
When you rebase a branch on master, all the changes on your branch are reapplied to the most recent version of master. In other words, Git tries to pretend that the changes you made to the old version of master were instead made to the new version of master. During this process, you should expect to encounter at least one "rebase conflict." This happens when Git's attempt to reapply the changes fails because your changes conflicted with other changes that have been made. You can tell that this happened because you'll see lines in the output that look like
CONFLICT (content): Merge conflict in file.rs
When you open these files, you'll see sections of the form
<<<<<<< HEAD
Original code
=======
Your code
>>>>>>> 8fbf656... Commit fixes 12345
This represents the lines in the file that Git could not figure out how to
rebase. The section between <<<<<<< HEAD and ======= has the code from
master, while the other side has your version of the code. You'll need to
decide how to deal with the conflict. You may want to keep your changes,
keep the changes on master, or combine the two.
Generally, resolving the conflict consists of two steps: First, fix the
particular conflict. Edit the file to make the changes you want and remove the
<<<<<<<, ======= and >>>>>>> lines in the process. Second, check the
surrounding code. If there was a conflict, its likely there are some logical
errors lying around too! It's a good idea to run x check here to make sure
there are no glaring errors.
Once you're all done fixing the conflicts, you need to stage the files that had
conflicts in them via git add. Afterwards, run git rebase --continue to let
Git know that you've resolved the conflicts and it should finish the rebase.
Once the rebase has succeeded, you'll want to update the associated branch on
your fork with git push --force-with-lease.
Keeping things up to date
The above section on Rebasing is a specific guide on rebasing work and dealing with merge conflicts. Here is some general advice about how to keep your local repo up-to-date with upstream changes:
Using git pull upstream master while on your local master branch regularly
will keep it up-to-date. You will also want to rebase your feature branches
up-to-date as well. After pulling, you can checkout the feature branches
and rebase them:
git checkout master
git pull upstream master --ff-only # to make certain there are no merge commits
git rebase master feature_branch
git push --force-with-lease # (set origin to be the same as local)
To avoid merges as per the No-Merge Policy, you may want to use
git config pull.ff only (this will apply the config only to the local repo)
to ensure that Git doesn't create merge commits when git pulling, without
needing to pass --ff-only or --rebase every time.
You can also git push --force-with-lease from master to keep your fork's master in sync with
upstream.
Advanced Rebasing
Squash your commits
If your branch contains multiple consecutive rewrites of the same code, or if
the rebase conflicts are extremely severe, you can use
git rebase --interactive master to gain more control over the process. This
allows you to choose to skip commits, edit the commits that you do not skip,
change the order in which they are applied, or "squash" them into each other.
Alternatively, you can sacrifice the commit history like this:
# squash all the changes into one commit so you only have to worry about conflicts once
git rebase -i $(git merge-base master HEAD) # and squash all changes along the way
git rebase master
# fix all merge conflicts
git rebase --continue
"Squashing" commits into each other causes them to be merged into a single commit. Both the upside and downside of this is that it simplifies the history. On the one hand, you lose track of the steps in which changes were made, but the history becomes easier to work with.
You also may want to squash just the last few commits together, possibly
because they only represent "fixups" and not real changes. For example,
git rebase --interactive HEAD~2 will allow you to edit the two commits only.
git range-diff
After completing a rebase, and before pushing up your changes, you may want to
review the changes between your old branch and your new one. You can do that
with git range-diff master @{upstream} HEAD.
The first argument to range-diff, master in this case, is the base revision
that you're comparing your old and new branch against. The second argument is
the old version of your branch; in this case, @upstream means the version that
you've pushed to GitHub, which is the same as what people will see in your pull
request. Finally, the third argument to range-diff is the new version of
your branch; in this case, it is HEAD, which is the commit that is currently
checked-out in your local repo.
Note that you can also use the equivalent, abbreviated form git range-diff master @{u} HEAD.
Unlike in regular Git diffs, you'll see a - or + next to another - or +
in the range-diff output. The marker on the left indicates a change between the
old branch and the new branch, and the marker on the right indicates a change
you've committed. So, you can think of a range-diff as a "diff of diffs" since
it shows you the differences between your old diff and your new diff.
Here's an example of git range-diff output (taken from Git's
docs):
-: ------- > 1: 0ddba11 Prepare for the inevitable!
1: c0debee = 2: cab005e Add a helpful message at the start
2: f00dbal ! 3: decafe1 Describe a bug
@@ -1,3 +1,3 @@
Author: A U Thor <[email protected]>
-TODO: Describe a bug
+Describe a bug
@@ -324,5 +324,6
This is expected.
-+What is unexpected is that it will also crash.
++Unexpectedly, it also crashes. This is a bug, and the jury is
++still out there how to fix it best. See ticket #314 for details.
Contact
3: bedead < -: ------- TO-UNDO
(Note that git range-diff output in your terminal will probably be easier to
read than in this example because it will have colors.)
Another feature of git range-diff is that, unlike git diff, it will also
diff commit messages. This feature can be useful when amending several commit
messages so you can make sure you changed the right parts.
git range-diff is a very useful command, but note that it can take some time
to get used to its output format. You may also find Git's documentation on the
command useful, especially their "Examples" section.
No-Merge Policy
The rust-lang/rust repo uses what is known as a "rebase workflow." This means
that merge commits in PRs are not accepted. As a result, if you are running
git merge locally, chances are good that you should be rebasing instead. Of
course, this is not always true; if your merge will just be a fast-forward,
like the merges that git pull usually performs, then no merge commit is
created and you have nothing to worry about. Running git config merge.ff only
(this will apply the config to the local repo)
once will ensure that all the merges you perform are of this type, so that you
cannot make a mistake.
There are a number of reasons for this decision and like all others, it is a tradeoff. The main advantage is the generally linear commit history. This greatly simplifies bisecting and makes the history and commit log much easier to follow and understand.
Tips for reviewing
NOTE: This section is for reviewing PRs, not authoring them.
Hiding whitespace
Github has a button for disabling whitespace changes that may be useful.
You can also use git diff -w origin/master to view changes locally.
Fetching PRs
To checkout PRs locally, you can use git fetch upstream pull/NNNNN/head && git checkout FETCH_HEAD.
You can also use github's cli tool. Github shows a button on PRs where you can copy-paste the command to check it out locally. See https://cli.github.com/ for more info.
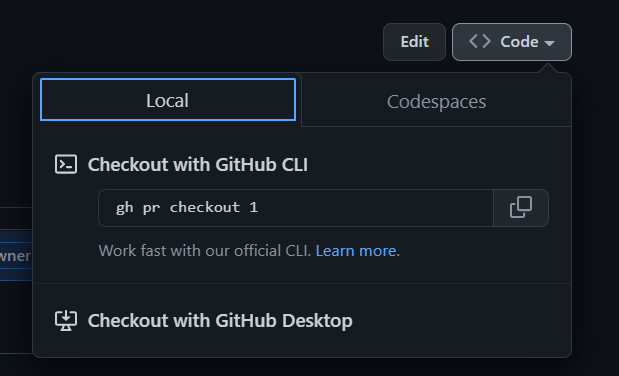
Moving large sections of code
Git and Github's default diff view for large moves within a file is quite poor; it will show each line as deleted and each line as added, forcing you to compare each line yourself. Git has an option to show moved lines in a different color:
git log -p --color-moved=dimmed-zebra --color-moved-ws=allow-indentation-change
See the docs for --color-moved for more info.
range-diff
See the relevant section for PR authors. This can be useful for comparing code that was force-pushed to make sure there are no unexpected changes.
Ignoring changes to specific files
Many large files in the repo are autogenerated. To view a diff that ignores changes to those files, you can use the following syntax (e.g. Cargo.lock):
git log -p ':!Cargo.lock'
Arbitrary patterns are supported (e.g. :!compiler/*). Patterns use the same syntax as
.gitignore, with : prepended to indicate a pattern.
Git submodules
NOTE: submodules are a nice thing to know about, but it isn't an absolute
prerequisite to contribute to rustc. If you are using Git for the first time,
you might want to get used to the main concepts of Git before reading this section.
The rust-lang/rust repository uses Git submodules as a way to use other
Rust projects from within the rust repo. Examples include Rust's fork of
llvm-project, cargo and libraries like stdarch and backtrace.
Those projects are developed and maintained in an separate Git (and GitHub)
repository, and they have their own Git history/commits, issue tracker and PRs.
Submodules allow us to create some sort of embedded sub-repository inside the
rust repository and use them like they were directories in the rust repository.
Take llvm-project for example. llvm-project is maintained in the rust-lang/llvm-project
repository, but it is used in rust-lang/rust by the compiler for code generation and
optimization. We bring it in rust as a submodule, in the src/llvm-project folder.
The contents of submodules are ignored by Git: submodules are in some sense isolated
from the rest of the repository. However, if you try to cd src/llvm-project and then
run git status:
HEAD detached at 9567f08afc943
nothing to commit, working tree clean
As far as git is concerned, you are no longer in the rust repo, but in the llvm-project repo.
You will notice that we are in "detached HEAD" state, i.e. not on a branch but on a
particular commit.
This is because, like any dependency, we want to be able to control which version to use.
Submodules allow us to do just that: every submodule is "pinned" to a certain
commit, which doesn't change unless modified manually. If you use git checkout <commit>
in the llvm-project directory and go back to the rust directory, you can stage this
change like any other, e.g. by running git add src/llvm-project. (Note that if
you don't stage the change to commit, then you run the risk that running
x will just undo your change by switching back to the previous commit when
it automatically "updates" the submodules.)
This version selection is usually done by the maintainers of the project, and looks like this.
Git submodules take some time to get used to, so don't worry if it isn't perfectly clear yet. You will rarely have to use them directly and, again, you don't need to know everything about submodules to contribute to Rust. Just know that they exist and that they correspond to some sort of embedded subrepository dependency that Git can nicely and fairly conveniently handle for us.
Hard-resetting submodules
Sometimes you might run into (when you run git status)
Changes not staged for commit:
(use "git add <file>..." to update what will be committed)
(use "git restore <file>..." to discard changes in working directory)
(commit or discard the untracked or modified content in submodules)
modified: src/llvm-project (new commits, modified content)
and when you try to run git submodule update it breaks horribly with errors like
error: RPC failed; curl 92 HTTP/2 stream 7 was not closed cleanly: CANCEL (err 8)
error: 2782 bytes of body are still expected
fetch-pack: unexpected disconnect while reading sideband packet
fatal: early EOF
fatal: fetch-pack: invalid index-pack output
fatal: Fetched in submodule path 'src/llvm-project', but it did not contain 5a5152f653959d14d68613a3a8a033fb65eec021. Direct fetching of that commit failed.
If you see (new commits, modified content) you can run
$ git submodule foreach git reset --hard
and then try git submodule update again.
Ignoring commits during git blame
Some commits contain large reformatting changes that don't otherwise change functionality. They can
be instructed to be ignored by git blame through
.git-blame-ignore-revs:
- Configure
git blameto use.git-blame-ignore-revsas the list of commits to ignore:git config blame.ignorerevsfile .git-blame-ignore-revs - Add suitable commits that you wish to be ignored by
git blame.
Please include a comment for the commit that you add to .git-blame-ignore-revs so people can
easily figure out why a commit is ignored.
Mastering @rustbot
@rustbot (also known as triagebot) is a utility robot that is mostly used to
allow any contributor to achieve certain tasks that would normally require GitHub
membership to the rust-lang organization. Its most interesting features for
contributors to rustc are issue claiming and relabeling.
Issue claiming
@rustbot exposes a command that allows anyone to assign an issue to themselves.
If you see an issue you want to work on, you can send the following message as a
comment on the issue at hand:
@rustbot claim
This will tell @rustbot to assign the issue to you if it has no assignee yet.
Note that because of some GitHub restrictions, you may be assigned indirectly,
i.e. @rustbot will assign itself as a placeholder and edit the top comment to
reflect the fact that the issue is now assigned to you.
If you want to unassign from an issue, @rustbot has a different command:
@rustbot release-assignment
Issue relabeling
Changing labels for an issue or PR is also normally reserved for members of the
organization. However, @rustbot allows you to relabel an issue yourself, only
with a few restrictions. This is mostly useful in two cases:
Helping with issue triage: Rust's issue tracker has more than 5,000 open issues at the time of this writing, so labels are the most powerful tool that we have to keep it as tidy as possible. You don't need to spend hours in the issue tracker to triage issues, but if you open an issue, you should feel free to label it if you are comfortable with doing it yourself.
Updating the status of a PR: We use "status labels" to reflect the status of
PRs. For example, if your PR has merge conflicts, it will automatically be assigned
the S-waiting-on-author, and reviewers might not review it until you rebase your
PR. Once you do rebase your branch, you should change the labels yourself to remove
the S-waiting-on-author label and add back S-waiting-on-review. In this case,
the @rustbot command will look like this:
@rustbot label -S-waiting-on-author +S-waiting-on-review
The syntax for this command is pretty loose, so there are other variants of this
command invocation. There are also some shortcuts to update labels,
for instance @rustbot ready will do the same thing with above command.
For more details, see the docs page about labeling and shortcuts.
Other commands
If you are interested in seeing what @rustbot is capable of, check out its documentation,
which is meant as a reference for the bot and should be kept up to date every time the
bot gets an upgrade.
@rustbot is maintained by the Release team. If you have any feedback regarding
existing commands or suggestions for new commands, feel free to reach out
on Zulip or file an issue in the triagebot repository
Walkthrough: a typical contribution
There are a lot of ways to contribute to the Rust compiler, including fixing bugs, improving performance, helping design features, providing feedback on existing features, etc. This chapter does not claim to scratch the surface. Instead, it walks through the design and implementation of a new feature. Not all of the steps and processes described here are needed for every contribution, and I will try to point those out as they arise.
In general, if you are interested in making a contribution and aren't sure where to start, please feel free to ask!
Overview
The feature I will discuss in this chapter is the ? Kleene operator for
macros. Basically, we want to be able to write something like this:
macro_rules! foo {
($arg:ident $(, $optional_arg:ident)?) => {
println!("{}", $arg);
$(
println!("{}", $optional_arg);
)?
}
}
fn main() {
let x = 0;
foo!(x); // ok! prints "0"
foo!(x, x); // ok! prints "0 0"
}
So basically, the $(pat)? matcher in the macro means "this pattern can occur
0 or 1 times", similar to other regex syntaxes.
There were a number of steps to go from an idea to stable Rust feature. Here is a quick list. We will go through each of these in order below. As I mentioned before, not all of these are needed for every type of contribution.
- Idea discussion/Pre-RFC A Pre-RFC is an early draft or design discussion of a feature. This stage is intended to flesh out the design space a bit and get a grasp on the different merits and problems with an idea. It's a great way to get early feedback on your idea before presenting it to the wider audience. You can find the original discussion here.
- RFC This is when you formally present your idea to the community for consideration. You can find the RFC here.
- Implementation Implement your idea unstably in the compiler. You can find the original implementation here.
- Possibly iterate/refine As the community gets experience with your
feature on the nightly compiler and in
std, there may be additional feedback about design choice that might be adjusted. This particular feature went through a number of iterations. - Stabilization When your feature has baked enough, a Rust team member may propose to stabilize it. If there is consensus, this is done.
- Relax Your feature is now a stable Rust feature!
Pre-RFC and RFC
NOTE: In general, if you are not proposing a new feature or substantial change to Rust or the ecosystem, you don't need to follow the RFC process. Instead, you can just jump to implementation.
You can find the official guidelines for when to open an RFC here.
An RFC is a document that describes the feature or change you are proposing in detail. Anyone can write an RFC; the process is the same for everyone, including Rust team members.
To open an RFC, open a PR on the rust-lang/rfcs repo on GitHub. You can find detailed instructions in the README.
Before opening an RFC, you should do the research to "flesh out" your idea. Hastily-proposed RFCs tend not to be accepted. You should generally have a good description of the motivation, impact, disadvantages, and potential interactions with other features.
If that sounds like a lot of work, it's because it is. But no fear! Even if you're not a compiler hacker, you can get great feedback by doing a pre-RFC. This is an informal discussion of the idea. The best place to do this is internals.rust-lang.org. Your post doesn't have to follow any particular structure. It doesn't even need to be a cohesive idea. Generally, you will get tons of feedback that you can integrate back to produce a good RFC.
(Another pro-tip: try searching the RFCs repo and internals for prior related ideas. A lot of times an idea has already been considered and was either rejected or postponed to be tried again later. This can save you and everybody else some time)
In the case of our example, a participant in the pre-RFC thread pointed out a syntax ambiguity and a potential resolution. Also, the overall feedback seemed positive. In this case, the discussion converged pretty quickly, but for some ideas, a lot more discussion can happen (e.g. see this RFC which received a whopping 684 comments!). If that happens, don't be discouraged; it means the community is interested in your idea, but it perhaps needs some adjustments.
The RFC for our ? macro feature did receive some discussion on the RFC thread
too. As with most RFCs, there were a few questions that we couldn't answer by
discussion: we needed experience using the feature to decide. Such questions
are listed in the "Unresolved Questions" section of the RFC. Also, over the
course of the RFC discussion, you will probably want to update the RFC document
itself to reflect the course of the discussion (e.g. new alternatives or prior
work may be added or you may decide to change parts of the proposal itself).
In the end, when the discussion seems to reach a consensus and die down a bit, a Rust team member may propose to move to "final comment period" (FCP) with one of three possible dispositions. This means that they want the other members of the appropriate teams to review and comment on the RFC. More discussion may ensue, which may result in more changes or unresolved questions being added. At some point, when everyone is satisfied, the RFC enters the FCP, which is the last chance for people to bring up objections. When the FCP is over, the disposition is adopted. Here are the three possible dispositions:
- Merge: accept the feature. Here is the proposal to merge for our
?macro feature. - Close: this feature in its current form is not a good fit for rust. Don't be discouraged if this happens to your RFC, and don't take it personally. This is not a reflection on you, but rather a community decision that rust will go a different direction.
- Postpone: there is interest in going this direction but not at the moment. This happens most often because the appropriate Rust team doesn't have the bandwidth to shepherd the feature through the process to stabilization. Often this is the case when the feature doesn't fit into the team's roadmap. Postponed ideas may be revisited later.
When an RFC is merged, the PR is merged into the RFCs repo. A new tracking
issue is created in the rust-lang/rust repo to track progress on the feature
and discuss unresolved questions, implementation progress and blockers, etc.
Here is the tracking issue on for our ? macro feature.
Implementation
To make a change to the compiler, open a PR against the rust-lang/rust repo.
Depending on the feature/change/bug fix/improvement, implementation may be relatively-straightforward or it may be a major undertaking. You can always ask for help or mentorship from more experienced compiler devs. Also, you don't have to be the one to implement your feature; but keep in mind that if you don't, it might be a while before someone else does.
For the ? macro feature, I needed to go understand the relevant parts of
macro expansion in the compiler. Personally, I find that improving the
comments in the code is a helpful way of making sure I understand
it, but you don't have to do that if you don't want to.
I then implemented the original feature, as described in the RFC. When
a new feature is implemented, it goes behind a feature gate, which means that
you have to use #![feature(my_feature_name)] to use the feature. The feature
gate is removed when the feature is stabilized.
Most bug fixes and improvements don't require a feature gate. You can just make your changes/improvements.
When you open a PR on the rust-lang/rust, a bot will assign your PR to a
reviewer. If there is a particular Rust team member you are working with, you can
request that reviewer by leaving a comment on the thread with r? @reviewer-github-id (e.g. r? @eddyb). If you don't know who to request,
don't request anyone; the bot will assign someone automatically based on which files you changed.
The reviewer may request changes before they approve your PR, they may mark the PR with label
"S-waiting-on-author" after leaving comments, this means that the PR is blocked on you to make
some requested changes. When you finished iterating on the changes, you can mark the PR as
S-waiting-on-review again by leaving a comment with @rustbot ready, this will remove the
S-waiting-on-author label and add the S-waiting-on-review label.
Feel free to ask questions or discuss things you don't understand or disagree with. However,
recognize that the PR won't be merged unless someone on the Rust team approves
it. If a reviewer leave a comment like r=me after fixing ..., that means they approve the PR and
you can merge it with comment with @bors r=reviewer-github-id(e.g. @bors r=eddyb) to merge it
after fixing trivial issues. Note that r=someone requires permission and bors could say
something like "🔑 Insufficient privileges..." when commenting r=someone. In that case,
you have to ask the reviewer to revisit your PR.
When your reviewer approves the PR, it will go into a queue for yet another bot
called @bors. @bors manages the CI build/merge queue. When your PR reaches
the head of the @bors queue, @bors will test out the merge by running all
tests against your PR on GitHub Actions. This takes a lot of time to
finish. If all tests pass, the PR is merged and becomes part of the next
nightly compiler!
There are a couple of things that may happen for some PRs during the review process
- If the change is substantial enough, the reviewer may request an FCP on the PR. This gives all members of the appropriate team a chance to review the changes.
- If the change may cause breakage, the reviewer may request a crater run. This compiles the compiler with your changes and then attempts to compile all crates on crates.io with your modified compiler. This is a great smoke test to check if you introduced a change to compiler behavior that affects a large portion of the ecosystem.
- If the diff of your PR is large or the reviewer is busy, your PR may have some merge conflicts with other PRs that happen to get merged first. You should fix these merge conflicts using the normal git procedures.
If you are not doing a new feature or something like that (e.g. if you are fixing a bug), then that's it! Thanks for your contribution :)
Refining your implementation
As people get experience with your new feature on nightly, slight changes may
be proposed and unresolved questions may become resolved. Updates/changes go
through the same process for implementing any other changes, as described
above (i.e. submit a PR, go through review, wait for @bors, etc).
Some changes may be major enough to require an FCP and some review by Rust team members.
For the ? macro feature, we went through a few different iterations after the
original implementation: 1, 2, 3.
Along the way, we decided that ? should not take a separator, which was
previously an unresolved question listed in the RFC. We also changed the
disambiguation strategy: we decided to remove the ability to use ? as a
separator token for other repetition operators (e.g. + or *). However,
since this was a breaking change, we decided to do it over an edition boundary.
Thus, the new feature can be enabled only in edition 2018. These deviations
from the original RFC required another
FCP.
Stabilization
Finally, after the feature had baked for a while on nightly, a language team member moved to stabilize it.
A stabilization report needs to be written that includes
- brief description of the behavior and any deviations from the RFC
- which edition(s) are affected and how
- links to a few tests to show the interesting aspects
The stabilization report for our feature is here.
After this, a PR is made to remove the feature gate, enabling the feature by default (on the 2018 edition). A note is added to the Release notes about the feature.
Steps to stabilize the feature can be found at Stabilizing Features.
Implementing new language features
When you want to implement a new significant feature in the compiler, you need to go through this process to make sure everything goes smoothly.
NOTE: this section is for language features, not library features, which use a different process.
The @rfcbot FCP process
When the change is small and uncontroversial, then it can be done with just writing a PR and getting an r+ from someone who knows that part of the code. However, if the change is potentially controversial, it would be a bad idea to push it without consensus from the rest of the team (both in the "distributed system" sense to make sure you don't break anything you don't know about, and in the social sense to avoid PR fights).
If such a change seems to be too small to require a full formal RFC process (e.g., a small standard library addition, a big refactoring of the code, a "technically-breaking" change, or a "big bugfix" that basically amounts to a small feature) but is still too controversial or big to get by with a single r+, you can propose a final comment period (FCP). Or, if you're not on the relevant team (and thus don't have @rfcbot permissions), ask someone who is to start one; unless they have a concern themselves, they should.
Again, the FCP process is only needed if you need consensus – if you don't think anyone would have a problem with your change, it's OK to get by with only an r+. For example, it is OK to add or modify unstable command-line flags or attributes without an FCP for compiler development or standard library use, as long as you don't expect them to be in wide use in the nightly ecosystem. Some teams have lighter weight processes that they use in scenarios like this; for example, the compiler team recommends filing a Major Change Proposal (MCP) as a lightweight way to garner support and feedback without requiring full consensus.
You don't need to have the implementation fully ready for r+ to propose an FCP, but it is generally a good idea to have at least a proof of concept so that people can see what you are talking about.
When an FCP is proposed, it requires all members of the team to sign off the FCP. After they all do so, there's a 10-day-long "final comment period" (hence the name) where everybody can comment, and if no concerns are raised, the PR/issue gets FCP approval.
The logistics of writing features
There are a few "logistic" hoops you might need to go through in order to implement a feature in a working way.
Warning Cycles
In some cases, a feature or bugfix might break some existing programs in some edge cases. In that case, you might want to do a crater run to assess the impact and possibly add a future-compatibility lint, similar to those used for edition-gated lints.
Stability
We value the stability of Rust. Code that works and runs on stable should (mostly) not break. Because of that, we don't want to release a feature to the world with only team consensus and code review - we want to gain real-world experience on using that feature on nightly, and we might want to change the feature based on that experience.
To allow for that, we must make sure users don't accidentally depend on that new feature - otherwise, especially if experimentation takes time or is delayed and the feature takes the trains to stable, it would end up de facto stable and we'll not be able to make changes in it without breaking people's code.
The way we do that is that we make sure all new features are feature
gated - they can't be used without enabling a feature gate
(#[feature(foo)]), which can't be done in a stable/beta compiler.
See the stability in code section for the technical details.
Eventually, after we gain enough experience using the feature, make the necessary changes, and are satisfied, we expose it to the world using the stabilization process described here. Until then, the feature is not set in stone: every part of the feature can be changed, or the feature might be completely rewritten or removed. Features are not supposed to gain tenure by being unstable and unchanged for a year.
Tracking Issues
To keep track of the status of an unstable feature, the experience we get while using it on nightly, and of the concerns that block its stabilization, every feature-gate needs a tracking issue. General discussions about the feature should be done on the tracking issue.
For features that have an RFC, you should use the RFC's tracking issue for the feature.
For other features, you'll have to make a tracking issue for that feature. The issue title should be "Tracking issue for YOUR FEATURE". Use the "Tracking Issue" issue template.
Stability in code
The below steps needs to be followed in order to implement a new unstable feature:
-
Open a tracking issue - if you have an RFC, you can use the tracking issue for the RFC.
The tracking issue should be labeled with at least
C-tracking-issue. For a language feature, a labelF-feature_nameshould be added as well. -
Pick a name for the feature gate (for RFCs, use the name in the RFC).
-
Add the feature name to
rustc_span/src/symbol.rsin theSymbols {...}block.Note that this block must be in alphabetical order.
-
Add a feature gate declaration to
rustc_feature/src/unstable.rsin the unstabledeclare_featuresblock./// description of feature (unstable, $feature_name, "CURRENT_RUSTC_VERSION", Some($tracking_issue_number))If you haven't yet opened a tracking issue (e.g. because you want initial feedback on whether the feature is likely to be accepted), you can temporarily use
None- but make sure to update it before the PR is merged!For example:
/// Allows defining identifiers beyond ASCII. (unstable, non_ascii_idents, "CURRENT_RUSTC_VERSION", Some(55467), None),Features can be marked as incomplete, and trigger the warn-by-default
incomplete_featureslint by setting their type toincomplete:/// Allows unsized rvalues at arguments and parameters. (incomplete, unsized_locals, "CURRENT_RUSTC_VERSION", Some(48055), None),To avoid semantic merge conflicts, please use
CURRENT_RUSTC_VERSIONinstead of1.70or another explicit version number. -
Prevent usage of the new feature unless the feature gate is set. You can check it in most places in the compiler using the expression
tcx.features().$feature_name(orsess.features_untracked().$feature_nameif the tcx is unavailable)If the feature gate is not set, you should either maintain the pre-feature behavior or raise an error, depending on what makes sense. Errors should generally use
rustc_session::parse::feature_err. For an example of adding an error, see #81015.For features introducing new syntax, pre-expansion gating should be used instead. During parsing, when the new syntax is parsed, the symbol must be inserted to the current crate's
GatedSpansviaself.sess.gated_span.gate(sym::my_feature, span).After being inserted to the gated spans, the span must be checked in the
rustc_ast_passes::feature_gate::check_cratefunction, which actually denies features. Exactly how it is gated depends on the exact type of feature, but most likely will use thegate_all!()macro. -
Add a test to ensure the feature cannot be used without a feature gate, by creating
tests/ui/feature-gates/feature-gate-$feature_name.rs. You can generate the corresponding.stderrfile by running./x test tests/ui/feature-gates/ --bless. -
Add a section to the unstable book, in
src/doc/unstable-book/src/language-features/$feature_name.md. -
Write a lot of tests for the new feature, preferably in
tests/ui/$feature_name/. PRs without tests will not be accepted! -
Get your PR reviewed and land it. You have now successfully implemented a feature in Rust!
Stability attributes
This section is about the stability attributes and schemes that allow stable APIs to use unstable APIs internally in the rustc standard library.
NOTE: this section is for library features, not language features. For instructions on stabilizing a language feature see Stabilizing Features.
- unstable
- stable
- rustc_const_unstable
- rustc_const_stable
- rustc_const_stable_indirect
- rustc_const_stable_intrinsic
- rustc_default_body_unstable
- Stabilizing a library feature
- allow_internal_unstable
- rustc_allow_const_fn_unstable
- staged_api
- deprecated
unstable
The #[unstable(feature = "foo", issue = "1234", reason = "lorem ipsum")]
attribute explicitly marks an item as unstable. Items that are marked as
"unstable" cannot be used without a corresponding #![feature] attribute on
the crate, even on a nightly compiler. This restriction only applies across
crate boundaries, unstable items may be used within the crate that defines
them.
The issue field specifies the associated GitHub issue number. This field is
required and all unstable features should have an associated tracking issue. In
rare cases where there is no sensible value issue = "none" is used.
The unstable attribute infects all sub-items, where the attribute doesn't
have to be reapplied. So if you apply this to a module, all items in the module
will be unstable.
You can make specific sub-items stable by using the #[stable] attribute on
them. The stability scheme works similarly to how pub works. You can have
public functions of nonpublic modules and you can have stable functions in
unstable modules or vice versa.
Previously, due to a rustc bug, stable items inside unstable modules were
available to stable code in that location.
As of September 2024, items with accidentally stabilized
paths are marked with the #[rustc_allowed_through_unstable_modules] attribute
to prevent code dependent on those paths from breaking.
The unstable attribute may also have the soft value, which makes it a
future-incompatible deny-by-default lint instead of a hard error. This is used
by the bench attribute which was accidentally accepted in the past. This
prevents breaking dependencies by leveraging Cargo's lint capping.
stable
The #[stable(feature = "foo", since = "1.420.69")] attribute explicitly
marks an item as stabilized. Note that stable functions may use unstable things in their body.
rustc_const_unstable
The #[rustc_const_unstable(feature = "foo", issue = "1234", reason = "lorem ipsum")] has the same interface as the unstable attribute. It is used to mark
const fn as having their constness be unstable. This is only needed in rare cases:
- If a
const fnmakes use of unstable language features or intrinsics. (The compiler will tell you to add the attribute if you run into this.) - If a
const fnis#[stable]but not yet intended to be const-stable.
Const-stability differs from regular stability in that it is recursive: a
#[rustc_const_unstable(...)] function cannot even be indirectly called from stable code. This is
to avoid accidentally leaking unstable compiler implementation artifacts to stable code or locking
us into the accidental quirks of an incomplete implementation. See the rustc_const_stable_indirect
and rustc_allow_const_fn_unstable attributes below for how to fine-tune this check.
rustc_const_stable
The #[rustc_const_stable(feature = "foo", since = "1.420.69")] attribute explicitly marks
a const fn as having its constness be stable.
rustc_const_stable_indirect
The #[rustc_const_stable_indirect] attribute can be added to a #[rustc_const_unstable(...)]
function to make it callable from #[rustc_const_stable(...)] functions. This indicates that the
function is ready for stable in terms of its implementation (i.e., it doesn't use any unstable
compiler features); the only reason it is not const-stable yet are API concerns.
This should also be added to lang items for which const-calls are synthesized in the compiler, to ensure those calls do not bypass recursive const stability rules.
rustc_const_stable_intrinsic
On an intrinsic, this attribute marks the intrinsic as "ready to be used by public stable functions".
The rustc_const_unstable can be removed when this attribute is added.
Adding this attribute to an intrinsic requires t-lang and wg-const-eval approval!
rustc_default_body_unstable
The #[rustc_default_body_unstable(feature = "foo", issue = "1234", reason = "lorem ipsum")] attribute has the same interface as the unstable attribute.
It is used to mark the default implementation for an item within a trait as
unstable.
A trait with a default-body-unstable item can be implemented stably by providing
an explicit body for any such item, or the default body can be used by enabling
its corresponding #![feature].
Stabilizing a library feature
To stabilize a feature, follow these steps:
- Ask a @T-libs-api member to start an FCP on the tracking issue and wait for
the FCP to complete (with
disposition-merge). - Change
#[unstable(...)]to#[stable(since = "CURRENT_RUSTC_VERSION")]. - Remove
#![feature(...)]from any test or doc-test for this API. If the feature is used in the compiler or tools, remove it from there as well. - If this is a
const fn, add#[rustc_const_stable(since = "CURRENT_RUSTC_VERSION")]. Alternatively, if this is not supposed to be const-stabilized yet, add#[rustc_const_unstable(...)]for some new feature gate (with a new tracking issue). - Open a PR against
rust-lang/rust.- Add the appropriate labels:
@rustbot modify labels: +T-libs-api. - Link to the tracking issue and say "Closes #XXXXX".
- Add the appropriate labels:
You can see an example of stabilizing a feature with tracking issue #81656 with FCP and the associated implementation PR #84642.
allow_internal_unstable
Macros and compiler desugarings expose their bodies to the call
site. To work around not being able to use unstable things in the standard
library's macros, there's the #[allow_internal_unstable(feature1, feature2)]
attribute that allows the given features to be used in stable macros.
Note that if a macro is used in const context and generates a call to a
#[rustc_const_unstable(...)] function, that will still be rejected even with
allow_internal_unstable. Add #[rustc_const_stable_indirect] to the function to ensure the macro
cannot accidentally bypass the recursive const stability checks.
rustc_allow_const_fn_unstable
As explained above, no unstable const features are allowed inside stable const fn, not even
indirectly.
However, sometimes we do know that a feature will get stabilized, just not when, or there is a
stable (but e.g. runtime-slow) workaround, so we could always fall back to some stable version if we
scrapped the unstable feature. In those cases, the [rustc_allow_const_fn_unstable(feature1, feature2)] attribute can be used to allow some unstable features in the body of a stable (or
indirectly stable) const fn.
You also need to take care to uphold the const fn invariant that calling it at runtime and
compile-time needs to behave the same (see also this blog post). This means that you
may not create a const fn that e.g. transmutes a memory address to an integer,
because the addresses of things are nondeterministic and often unknown at
compile-time.
Always ping @rust-lang/wg-const-eval if you are adding more
rustc_allow_const_fn_unstable attributes to any const fn.
staged_api
Any crate that uses the stable or unstable attributes must include the
#![feature(staged_api)] attribute on the crate.
deprecated
Deprecations in the standard library are nearly identical to deprecations in
user code. When #[deprecated] is used on an item, it must also have a stable
or unstable attribute.
deprecated has the following form:
#[deprecated(
since = "1.38.0",
note = "explanation for deprecation",
suggestion = "other_function"
)]
The suggestion field is optional. If given, it should be a string that can be
used as a machine-applicable suggestion to correct the warning. This is
typically used when the identifier is renamed, but no other significant changes
are necessary. When the suggestion field is used, you need to have
#![feature(deprecated_suggestion)] at the crate root.
Another difference from user code is that the since field is actually checked
against the current version of rustc. If since is in a future version, then
the deprecated_in_future lint is triggered which is default allow, but most
of the standard library raises it to a warning with
#![warn(deprecated_in_future)].
Request for stabilization
NOTE: this page is about stabilizing language features. For stabilizing library features, see Stabilizing a library feature.
Once an unstable feature has been well-tested with no outstanding concern, anyone may push for its stabilization. It involves the following steps:
Documentation PRs
If any documentation for this feature exists, it should be
in the Unstable Book, located at src/doc/unstable-book.
If it exists, the page for the feature gate should be removed.
If there was documentation there, integrating it into the existing documentation is needed.
If there wasn't documentation there, it needs to be added.
Places that may need updated documentation:
- The Reference: This must be updated, in full detail.
- The Book: This may or may not need updating, depends. If you're not sure, please open an issue on this repository and it can be discussed.
- standard library documentation: As needed. Language features
often don't need this, but if it's a feature that changes
how good examples are written, such as when
?was added to the language, updating examples is important. - Rust by Example: As needed.
Prepare PRs to update documentation involving this new feature for repositories mentioned above. Maintainers of these repositories will keep these PRs open until the whole stabilization process has completed. Meanwhile, we can proceed to the next step.
Write a stabilization report
Find the tracking issue of the feature, and create a short stabilization report. Essentially this would be a brief summary of the feature plus some links to test cases showing it works as expected, along with a list of edge cases that came up and were considered. This is a minimal "due diligence" that we do before stabilizing.
The report should contain:
- A summary, showing examples (e.g. code snippets) what is enabled by this feature.
- Links to test cases in our test suite regarding this feature and describe the feature's behavior on encountering edge cases.
- Links to the documentations (the PRs we have made in the previous steps).
- Any other relevant information.
- The resolutions of any unresolved questions if the stabilization is for an RFC.
Examples of stabilization reports can be found in rust-lang/rust#44494 and rust-lang/rust#28237 (these links will bring you directly to the comment containing the stabilization report).
FCP
If any member of the team responsible for tracking this feature agrees with stabilizing this feature, they will start the FCP (final-comment-period) process by commenting
@rfcbot fcp merge
The rest of the team members will review the proposal. If the final decision is to stabilize, we proceed to do the actual code modification.
Stabilization PR
This is for stabilizing language features. If you are stabilizing a library feature, see the stabilization chapter of the std dev guide instead.
Once we have decided to stabilize a feature, we need to have a PR that actually makes that stabilization happen. These kinds of PRs are a great way to get involved in Rust, as they take you on a little tour through the source code.
Here is a general guide to how to stabilize a feature -- every feature is different, of course, so some features may require steps beyond what this guide talks about.
Note: Before we stabilize any feature, it's the rule that it should appear in the documentation.
Updating the feature-gate listing
There is a central listing of unstable feature-gates in
compiler/rustc_feature/src/unstable.rs. Search for the declare_features!
macro. There should be an entry for the feature you are aiming
to stabilize, something like (this example is taken from
rust-lang/rust#32409:
// pub(restricted) visibilities (RFC 1422)
(unstable, pub_restricted, "CURRENT_RUSTC_VERSION", Some(32409)),
The above line should be moved to compiler/rustc_feature/src/accepted.rs.
Entries in the declare_features! call are sorted, so find the correct place.
When it is done, it should look like:
// pub(restricted) visibilities (RFC 1422)
(accepted, pub_restricted, "CURRENT_RUSTC_VERSION", Some(32409)),
// note that we changed this
(Even though you will encounter version numbers in the file of past changes,
you should not put the rustc version you expect your stabilization to happen in,
but instead CURRENT_RUSTC_VERSION)
Removing existing uses of the feature-gate
Next search for the feature string (in this case, pub_restricted)
in the codebase to find where it appears. Change uses of
#![feature(XXX)] from the std and any rustc crates (this includes test folders
under library/ and compiler/ but not the toplevel tests/ one) to be
#![cfg_attr(bootstrap, feature(XXX))]. This includes the feature-gate
only for stage0, which is built using the current beta (this is
needed because the feature is still unstable in the current beta).
Also, remove those strings from any tests (e.g. under tests/). If there are tests
specifically targeting the feature-gate (i.e., testing that the
feature-gate is required to use the feature, but nothing else),
simply remove the test.
Do not require the feature-gate to use the feature
Most importantly, remove the code which flags an error if the
feature-gate is not present (since the feature is now considered
stable). If the feature can be detected because it employs some
new syntax, then a common place for that code to be is in the
same compiler/rustc_ast_passes/src/feature_gate.rs.
For example, you might see code like this:
gate_feature_post!(&self, pub_restricted, span,
"`pub(restricted)` syntax is experimental");
This gate_feature_post! macro prints an error if the
pub_restricted feature is not enabled. It is not needed
now that #[pub_restricted] is stable.
For more subtle features, you may find code like this:
if self.tcx.sess.features.borrow().pub_restricted { /* XXX */ }
This pub_restricted field (obviously named after the feature)
would ordinarily be false if the feature flag is not present
and true if it is. So transform the code to assume that the field
is true. In this case, that would mean removing the if and
leaving just the /* XXX */.
if self.tcx.sess.features.borrow().pub_restricted { /* XXX */ }
becomes
/* XXX */
if self.tcx.sess.features.borrow().pub_restricted && something { /* XXX */ }
becomes
if something { /* XXX */ }
Feature Gates
This chapter is intended to provide basic help for adding, removing, and modifying feature gates.
Note that this is specific to language feature gates; library feature gates use a different mechanism.
Adding a feature gate
See "Stability in code" in the "Implementing new features" section for instructions.
Removing a feature gate
To remove a feature gate, follow these steps:
-
Remove the feature gate declaration in
rustc_feature/src/unstable.rs. It will look like this:/// description of feature (unstable, $feature_name, "$version", Some($tracking_issue_number)) -
Add a modified version of the feature gate declaration that you just removed to
rustc_feature/src/removed.rs:/// description of feature (removed, $old_feature_name, "$version", Some($tracking_issue_number), Some("$why_it_was_removed"))
Renaming a feature gate
To rename a feature gate, follow these steps (the first two are the same steps to follow when removing a feature gate):
-
Remove the old feature gate declaration in
rustc_feature/src/unstable.rs. It will look like this:/// description of feature (unstable, $old_feature_name, "$version", Some($tracking_issue_number)) -
Add a modified version of the old feature gate declaration that you just removed to
rustc_feature/src/removed.rs:/// description of feature /// Renamed to `$new_feature_name` (removed, $old_feature_name, "$version", Some($tracking_issue_number), Some("renamed to `$new_feature_name`")) -
Add a feature gate declaration with the new name to
rustc_feature/src/unstable.rs. It should look very similar to the old declaration:/// description of feature (unstable, $new_feature_name, "$version", Some($tracking_issue_number))
Stabilizing a feature
See "Updating the feature-gate listing" in the "Stabilizing Features" chapter for instructions. There are additional steps you will need to take beyond just updating the declaration!
This file offers some tips on the coding conventions for rustc. This chapter covers formatting, coding for correctness, using crates from crates.io, and some tips on structuring your PR for easy review.
Formatting and the tidy script
rustc is moving towards the Rust standard coding style.
However, for now we don't use stable rustfmt; we use a pinned version with a
special config, so this may result in different style from normal rustfmt.
Therefore, formatting this repository using cargo fmt is not recommended.
Instead, formatting should be done using ./x fmt. It's a good habit to run
./x fmt before every commit, as this reduces conflicts later.
Formatting is checked by the tidy script. It runs automatically when you do
./x test and can be run in isolation with ./x fmt --check.
If you want to use format-on-save in your editor, the pinned version of
rustfmt is built under build/<target>/stage0/bin/rustfmt. You'll have to
pass the --edition=2021 argument yourself when calling
rustfmt directly.
Formatting C++ code
The compiler contains some C++ code for interfacing with parts of LLVM that don't have a stable C API. When modifying that code, use this command to format it:
./x test tidy --extra-checks=cpp:fmt --bless
This uses a pinned version of clang-format, to avoid relying on the local
environment.
Copyright notice
In the past, files began with a copyright and license notice. Please omit this notice for new files licensed under the standard terms (dual MIT/Apache-2.0).
All of the copyright notices should be gone by now, but if you come across one in the rust-lang/rust repo, feel free to open a PR to remove it.
Line length
Lines should be at most 100 characters. It's even better if you can keep things to 80.
Ignoring the line length limit. Sometimes – in particular for tests – it can be necessary to exempt yourself from this limit. In that case, you can add a comment towards the top of the file like so:
#![allow(unused)] fn main() { // ignore-tidy-linelength }
Tabs vs spaces
Prefer 4-space indent.
Coding for correctness
Beyond formatting, there are a few other tips that are worth following.
Prefer exhaustive matches
Using _ in a match is convenient, but it means that when new
variants are added to the enum, they may not get handled correctly.
Ask yourself: if a new variant were added to this enum, what's the
chance that it would want to use the _ code, versus having some
other treatment? Unless the answer is "low", then prefer an
exhaustive match. (The same advice applies to if let and while let, which are effectively tests for a single variant.)
Use "TODO" comments for things you don't want to forget
As a useful tool to yourself, you can insert a // TODO comment
for something that you want to get back to before you land your PR:
fn do_something() {
if something_else {
unimplemented!(); // TODO write this
}
}
The tidy script will report an error for a // TODO comment, so this
code would not be able to land until the TODO is fixed (or removed).
This can also be useful in a PR as a way to signal from one commit that you are leaving a bug that a later commit will fix:
if foo {
return true; // TODO wrong, but will be fixed in a later commit
}
Using crates from crates.io
See the crates.io dependencies section.
How to structure your PR
How you prepare the commits in your PR can make a big difference for the reviewer. Here are some tips.
Isolate "pure refactorings" into their own commit. For example, if you rename a method, then put that rename into its own commit, along with the renames of all the uses.
More commits is usually better. If you are doing a large change, it's almost always better to break it up into smaller steps that can be independently understood. The one thing to be aware of is that if you introduce some code following one strategy, then change it dramatically (versus adding to it) in a later commit, that 'back-and-forth' can be confusing.
Format liberally. While only the final commit of a PR must be correctly
formatted, it is both easier to review and less noisy to format each commit
individually using ./x fmt.
No merges. We do not allow merge commits into our history, other
than those by bors. If you get a merge conflict, rebase instead via a
command like git rebase -i rust-lang/master (presuming you use the
name rust-lang for your remote).
Individual commits do not have to build (but it's nice). We do not require that every intermediate commit successfully builds – we only expect to be able to bisect at a PR level. However, if you can make individual commits build, that is always helpful.
Naming conventions
Apart from normal Rust style/naming conventions, there are also some specific to the compiler.
-
cxtends to be short for "context" and is often used as a suffix. For example,tcxis a common name for the Typing Context. -
'tcxis used as the lifetime name for the Typing Context. -
Because
crateis a keyword, if you need a variable to represent something crate-related, often the spelling is changed tokrate.
Procedures for Breaking Changes
- Motivation
- Detailed design
- Tracking issue
- Tracking issue template
- Issuing future compatibility warnings
- Helpful techniques
- Crater and crates.io
- Is it ever acceptable to go directly to issuing errors?
- Stabilization
- Removing a lint
- Remove the lint.
- Add the lint to the list of removed lints.
- Update the places that issue the lint
- Update tests
- All done!
This page defines the best practices procedure for making bug fixes or soundness corrections in the compiler that can cause existing code to stop compiling. This text is based on RFC 1589.
Motivation
From time to time, we encounter the need to make a bug fix, soundness correction, or other change in the compiler which will cause existing code to stop compiling. When this happens, it is important that we handle the change in a way that gives users of Rust a smooth transition. What we want to avoid is that existing programs suddenly stop compiling with opaque error messages: we would prefer to have a gradual period of warnings, with clear guidance as to what the problem is, how to fix it, and why the change was made. This RFC describes the procedure that we have been developing for handling breaking changes that aims to achieve that kind of smooth transition.
One of the key points of this policy is that (a) warnings should be issued initially rather than hard errors if at all possible and (b) every change that causes existing code to stop compiling will have an associated tracking issue. This issue provides a point to collect feedback on the results of that change. Sometimes changes have unexpectedly large consequences or there may be a way to avoid the change that was not considered. In those cases, we may decide to change course and roll back the change, or find another solution (if warnings are being used, this is particularly easy to do).
What qualifies as a bug fix?
Note that this RFC does not try to define when a breaking change is permitted. That is already covered under RFC 1122. This document assumes that the change being made is in accordance with those policies. Here is a summary of the conditions from RFC 1122:
- Soundness changes: Fixes to holes uncovered in the type system.
- Compiler bugs: Places where the compiler is not implementing the specified semantics found in an RFC or lang-team decision.
- Underspecified language semantics: Clarifications to grey areas where the compiler behaves inconsistently and no formal behavior had been previously decided.
Please see the RFC for full details!
Detailed design
The procedure for making a breaking change is as follows (each of these steps is described in more detail below):
- Do a crater run to assess the impact of the change.
- Make a special tracking issue dedicated to the change.
- Do not report an error right away. Instead, issue forwards-compatibility
lint warnings.
- Sometimes this is not straightforward. See the text below for suggestions on different techniques we have employed in the past.
- For cases where warnings are infeasible:
- Report errors, but make every effort to give a targeted error message that directs users to the tracking issue
- Submit PRs to all known affected crates that fix the issue
- or, at minimum, alert the owners of those crates to the problem and direct them to the tracking issue
- Once the change has been in the wild for at least one cycle, we can stabilize the change, converting those warnings into errors.
Finally, for changes to rustc_ast that will affect plugins, the general policy
is to batch these changes. That is discussed below in more detail.
Tracking issue
Every breaking change should be accompanied by a dedicated tracking issue for that change. The main text of this issue should describe the change being made, with a focus on what users must do to fix their code. The issue should be approachable and practical; it may make sense to direct users to an RFC or some other issue for the full details. The issue also serves as a place where users can comment with questions or other concerns.
A template for these breaking-change tracking issues can be found below. An example of how such an issue should look can be found here.
The issue should be tagged with (at least) B-unstable and T-compiler.
Tracking issue template
This is a template to use for tracking issues:
This is the **summary issue** for the `YOUR_LINT_NAME_HERE`
future-compatibility warning and other related errors. The goal of
this page is describe why this change was made and how you can fix
code that is affected by it. It also provides a place to ask questions
or register a complaint if you feel the change should not be made. For
more information on the policy around future-compatibility warnings,
see our [breaking change policy guidelines][guidelines].
[guidelines]: LINK_TO_THIS_RFC
#### What is the warning for?
*Describe the conditions that trigger the warning and how they can be
fixed. Also explain why the change was made.**
#### When will this warning become a hard error?
At the beginning of each 6-week release cycle, the Rust compiler team
will review the set of outstanding future compatibility warnings and
nominate some of them for **Final Comment Period**. Toward the end of
the cycle, we will review any comments and make a final determination
whether to convert the warning into a hard error or remove it
entirely.
Issuing future compatibility warnings
The best way to handle a breaking change is to begin by issuing future-compatibility warnings. These are a special category of lint warning. Adding a new future-compatibility warning can be done as follows.
#![allow(unused)] fn main() { // 1. Define the lint in `compiler/rustc_middle/src/lint/builtin.rs`: declare_lint! { pub YOUR_ERROR_HERE, Warn, "illegal use of foo bar baz" } // 2. Add to the list of HardwiredLints in the same file: impl LintPass for HardwiredLints { fn get_lints(&self) -> LintArray { lint_array!( .., YOUR_ERROR_HERE ) } } // 3. Register the lint in `compiler/rustc_lint/src/lib.rs`: store.register_future_incompatible(sess, vec![ ..., FutureIncompatibleInfo { id: LintId::of(YOUR_ERROR_HERE), reference: "issue #1234", // your tracking issue here! }, ]); // 4. Report the lint: tcx.lint_node( lint::builtin::YOUR_ERROR_HERE, path_id, binding.span, format!("some helper message here")); }
Helpful techniques
It can often be challenging to filter out new warnings from older, pre-existing errors. One technique that has been used in the past is to run the older code unchanged and collect the errors it would have reported. You can then issue warnings for any errors you would give which do not appear in that original set. Another option is to abort compilation after the original code completes if errors are reported: then you know that your new code will only execute when there were no errors before.
Crater and crates.io
Crater is a bot that will compile all crates.io crates and many public github repos with the compiler with your changes. A report will then be generated with crates that ceased to compile with or began to compile with your changes. Crater runs can take a few days to complete.
We should always do a crater run to assess impact. It is polite and considerate to at least notify the authors of affected crates the breaking change. If we can submit PRs to fix the problem, so much the better.
Is it ever acceptable to go directly to issuing errors?
Changes that are believed to have negligible impact can go directly to issuing
an error. One rule of thumb would be to check against crates.io: if fewer than
10 total affected projects are found (not root errors), we can move
straight to an error. In such cases, we should still make the "breaking change"
page as before, and we should ensure that the error directs users to this page.
In other words, everything should be the same except that users are getting an
error, and not a warning. Moreover, we should submit PRs to the affected
projects (ideally before the PR implementing the change lands in rustc).
If the impact is not believed to be negligible (e.g., more than 10 crates are affected), then warnings are required (unless the compiler team agrees to grant a special exemption in some particular case). If implementing warnings is not feasible, then we should make an aggressive strategy of migrating crates before we land the change so as to lower the number of affected crates. Here are some techniques for approaching this scenario:
- Issue warnings for subparts of the problem, and reserve the new errors for the smallest set of cases you can.
- Try to give a very precise error message that suggests how to fix the problem and directs users to the tracking issue.
- It may also make sense to layer the fix:
- First, add warnings where possible and let those land before proceeding to issue errors.
- Work with authors of affected crates to ensure that corrected versions are available before the fix lands, so that downstream users can use them.
Stabilization
After a change is made, we will stabilize the change using the same process that we use for unstable features:
-
After a new release is made, we will go through the outstanding tracking issues corresponding to breaking changes and nominate some of them for final comment period (FCP).
-
The FCP for such issues lasts for one cycle. In the final week or two of the cycle, we will review comments and make a final determination:
- Convert to error: the change should be made into a hard error.
- Revert: we should remove the warning and continue to allow the older code to compile.
- Defer: can't decide yet, wait longer, or try other strategies.
Ideally, breaking changes should have landed on the stable branch of the compiler before they are finalized.
Removing a lint
Once we have decided to make a "future warning" into a hard error, we need a PR
that removes the custom lint. As an example, here are the steps required to
remove the overlapping_inherent_impls compatibility lint. First, convert the
name of the lint to uppercase (OVERLAPPING_INHERENT_IMPLS) ripgrep through the
source for that string. We will basically by converting each place where this
lint name is mentioned (in the compiler, we use the upper-case name, and a macro
automatically generates the lower-case string; so searching for
overlapping_inherent_impls would not find much).
NOTE: these exact files don't exist anymore, but the procedure is still the same.
Remove the lint.
The first reference you will likely find is the lint definition in
rustc_session/src/lint/builtin.rs that resembles this:
#![allow(unused)] fn main() { declare_lint! { pub OVERLAPPING_INHERENT_IMPLS, Deny, // this may also say Warning "two overlapping inherent impls define an item with the same name were erroneously allowed" } }
This declare_lint! macro creates the relevant data structures. Remove it. You
will also find that there is a mention of OVERLAPPING_INHERENT_IMPLS later in
the file as part of a lint_array!; remove it too.
Next, you see a reference to OVERLAPPING_INHERENT_IMPLS in
rustc_lint/src/lib.rs. This is defining the lint as a "future
compatibility lint":
#![allow(unused)] fn main() { FutureIncompatibleInfo { id: LintId::of(OVERLAPPING_INHERENT_IMPLS), reference: "issue #36889 <https://github.com/rust-lang/rust/issues/36889>", }, }
Remove this too.
Add the lint to the list of removed lints.
In compiler/rustc_lint/src/lib.rs there is a list of "renamed and removed lints".
You can add this lint to the list:
#![allow(unused)] fn main() { store.register_removed("overlapping_inherent_impls", "converted into hard error, see #36889"); }
where #36889 is the tracking issue for your lint.
Update the places that issue the lint
Finally, the last class of references you will see are the places that actually
trigger the lint itself (i.e., what causes the warnings to appear). These
you do not want to delete. Instead, you want to convert them into errors. In
this case, the add_lint call looks like this:
#![allow(unused)] fn main() { self.tcx.sess.add_lint(lint::builtin::OVERLAPPING_INHERENT_IMPLS, node_id, self.tcx.span_of_impl(item1).unwrap(), msg); }
We want to convert this into an error. In some cases, there may be an existing error for this scenario. In others, we will need to allocate a fresh diagnostic code. Instructions for allocating a fresh diagnostic code can be found here. You may want to mention in the extended description that the compiler behavior changed on this point, and include a reference to the tracking issue for the change.
Let's say that we've adopted E0592 as our code. Then we can change the
add_lint() call above to something like:
#![allow(unused)] fn main() { struct_span_code_err!(self.dcx(), self.tcx.span_of_impl(item1).unwrap(), E0592, msg) .emit(); }
Update tests
Finally, run the test suite. These should be some tests that used to reference
the overlapping_inherent_impls lint, those will need to be updated. In
general, if the test used to have #[deny(overlapping_inherent_impls)], that
can just be removed.
./x test
All done!
Open a PR. =)
Using External Repositories
The rust-lang/rust git repository depends on several other repos in the rust-lang organization.
There are three main ways we use dependencies:
- As a Cargo dependency through crates.io (e.g.
rustc-rayon) - As a git subtree (e.g.
clippy) - As a git submodule (e.g.
cargo)
As a general rule, use crates.io for libraries that could be useful for others in the ecosystem; use subtrees for tools that depend on compiler internals and need to be updated if there are breaking changes; and use submodules for tools that are independent of the compiler.
External Dependencies (subtree)
As a developer to this repository, you don't have to treat the following external projects differently from other crates that are directly in this repo:
In contrast to submodule dependencies
(see below for those), the subtree dependencies are just regular files and directories which can
be updated in tree. However, if possible, enhancements, bug fixes, etc. specific
to these tools should be filed against the tools directly in their respective
upstream repositories. The exception is that when rustc changes are required to
implement a new tool feature or test, that should happen in one collective rustc PR.
Synchronizing a subtree
Periodically the changes made to subtree based dependencies need to be synchronized between this repository and the upstream tool repositories.
Subtree synchronizations are typically handled by the respective tool maintainers. Other users are welcome to submit synchronization PRs, however, in order to do so you will need to modify your local git installation and follow a very precise set of instructions. These instructions are documented, along with several useful tips and tricks, in the syncing subtree changes section in Clippy's Contributing guide. The instructions are applicable for use with any subtree based tool, just be sure to use the correct corresponding subtree directory and remote repository.
The synchronization process goes in two directions: subtree push and subtree pull.
A subtree push takes all the changes that happened to the copy in this repo and creates commits
on the remote repo that match the local changes. Every local
commit that touched the subtree causes a commit on the remote repo, but
is modified to move the files from the specified directory to the tool repo root.
A subtree pull takes all changes since the last subtree pull
from the tool repo and adds these commits to the rustc repo along with a merge commit that moves
the tool changes into the specified directory in the Rust repository.
It is recommended that you always do a push first and get that merged to the tool master branch.
Then, when you do a pull, the merge works without conflicts.
While it's definitely possible to resolve conflicts during a pull, you may have to redo the conflict
resolution if your PR doesn't get merged fast enough and there are new conflicts. Do not try to
rebase the result of a git subtree pull, rebasing merge commits is a bad idea in general.
You always need to specify the -P prefix to the subtree directory and the corresponding remote
repository. If you specify the wrong directory or repository
you'll get very fun merges that try to push the wrong directory to the wrong remote repository.
Luckily you can just abort this without any consequences by throwing away either the pulled commits
in rustc or the pushed branch on the remote and try again. It is usually fairly obvious
that this is happening because you suddenly get thousands of commits that want to be synchronized.
Creating a new subtree dependency
If you want to create a new subtree dependency from an existing repository, call (from this repository's root directory!)
git subtree add -P src/tools/clippy https://github.com/rust-lang/rust-clippy.git master
This will create a new commit, which you may not rebase under any circumstances! Delete the commit and redo the operation if you need to rebase.
Now you're done, the src/tools/clippy directory behaves as if Clippy were
part of the rustc monorepo, so no one but you (or others that synchronize
subtrees) actually needs to use git subtree.
External Dependencies (submodules)
Building Rust will also use external git repositories tracked using git
submodules. The complete list may be found in the .gitmodules file. Some
of these projects are required (like stdarch for the standard library) and
some of them are optional (like src/doc/book).
Usage of submodules is discussed more in the Using Git chapter.
Some of the submodules are allowed to be in a "broken" state where they either don't build or their tests don't pass, e.g. the documentation books like The Rust Reference. Maintainers of these projects will be notified when the project is in a broken state, and they should fix them as soon as possible. The current status is tracked on the toolstate website. More information may be found on the Forge Toolstate chapter. In practice, it is very rare for documentation to have broken toolstate.
Breakage is not allowed in the beta and stable channels, and must be addressed before the PR is merged. They are also not allowed to be broken on master in the week leading up to the beta cut.
Fuzzing
For the purposes of this guide, fuzzing is any testing methodology that involves compiling a wide variety of programs in an attempt to uncover bugs in rustc. Fuzzing is often used to find internal compiler errors (ICEs). Fuzzing can be beneficial, because it can find bugs before users run into them and provide small, self-contained programs that make the bug easier to track down. However, some common mistakes can reduce the helpfulness of fuzzing and end up making contributors' lives harder. To maximize your positive impact on the Rust project, please read this guide before reporting fuzzer-generated bugs!
Guidelines
In a nutshell
Please do:
- Ensure the bug is still present on the latest nightly rustc
- Include a reasonably minimal, standalone example along with any bug report
- Include all of the information requested in the bug report template
- Search for existing reports with the same message and query stack
- Format the test case with
rustfmt, if it maintains the bug - Indicate that the bug was found by fuzzing
Please don't:
- Don't report lots of bugs that use internal features, including but not
limited to
custom_mir,lang_items,no_core, andrustc_attrs. - Don't seed your fuzzer with inputs that are known to crash rustc (details below).
Discussion
If you're not sure whether or not an ICE is a duplicate of one that's already been reported, please go ahead and report it and link to issues you think might be related. In general, ICEs on the same line but with different query stacks are usually distinct bugs. For example, #109020 and #109129 had similar error messages:
error: internal compiler error: compiler/rustc_middle/src/ty/normalize_erasing_regions.rs:195:90: Failed to normalize <[closure@src/main.rs:36:25: 36:28] as std::ops::FnOnce<(Emplacable<()>,)>>::Output, maybe try to call `try_normalize_erasing_regions` instead
error: internal compiler error: compiler/rustc_middle/src/ty/normalize_erasing_regions.rs:195:90: Failed to normalize <() as Project>::Assoc, maybe try to call `try_normalize_erasing_regions` instead
but different query stacks:
query stack during panic:
#0 [fn_abi_of_instance] computing call ABI of `<[closure@src/main.rs:36:25: 36:28] as core::ops::function::FnOnce<(Emplacable<()>,)>>::call_once - shim(vtable)`
end of query stack
query stack during panic:
#0 [check_mod_attrs] checking attributes in top-level module
#1 [analysis] running analysis passes on this crate
end of query stack
Building a corpus
When building a corpus, be sure to avoid collecting tests that are already known to crash rustc. A fuzzer that is seeded with such tests is more likely to generate bugs with the same root cause, wasting everyone's time. The simplest way to avoid this is to loop over each file in the corpus, see if it causes an ICE, and remove it if so.
To build a corpus, you may want to use:
- The rustc/rust-analyzer/clippy test suites (or even source code) --- though avoid
tests that are already known to cause failures, which often begin with comments
like
// failure-status: 101or// known-bug: #NNN. - The already-fixed ICEs in Glacier --- though avoid the unfixed
ones in
ices/!
Extra credit
Here are a few things you can do to help the Rust project after filing an ICE.
- Bisect the bug to figure out when it was introduced
- Fix "distractions": problems with the test case that don't contribute to triggering the ICE, such as syntax errors or borrow-checking errors
- Minimize the test case (see below)
- Add the minimal test case to Glacier
Minimization
It is helpful to carefully minimize the fuzzer-generated input. When minimizing, be careful to preserve the original error, and avoid introducing distracting problems such as syntax, type-checking, or borrow-checking errors.
There are some tools that can help with minimization. If you're not sure how
to avoid introducing syntax, type-, and borrow-checking errors while using
these tools, post both the complete and minimized test cases. Generally,
syntax-aware tools give the best results in the least amount of time.
treereduce-rust and picireny are syntax-aware.
halfempty is not, but is generally a high-quality tool.
Effective fuzzing
When fuzzing rustc, you may want to avoid generating machine code, since this
is mostly done by LLVM. Try --emit=mir instead.
A variety of compiler flags can uncover different issues. -Zmir-opt-level=4
will turn on MIR optimization passes that are not run by default, potentially
uncovering interesting bugs. -Zvalidate-mir can help uncover such bugs.
If you're fuzzing a compiler you built, you may want to build it with -C target-cpu=native or even PGO/BOLT to squeeze out a few more executions per
second. Of course, it's best to try multiple build configurations and see
what actually results in superior throughput.
You may want to build rustc from source with debug assertions to find
additional bugs, though this is a trade-off: it can slow down fuzzing by
requiring extra work for every execution. To enable debug assertions, add this
to config.toml when compiling rustc:
[rust]
debug-assertions = true
ICEs that require debug assertions to reproduce should be tagged
requires-debug-assertions.
Existing projects
- fuzz-rustc demonstrates how to fuzz rustc with libfuzzer
- icemaker runs rustc and other tools on a large number of source files with a variety of flags to catch ICEs
- tree-splicer generates new source files by combining existing ones while maintaining correct syntax
Notification groups
The notification groups are an easy way to help out with rustc in a "piece-meal" fashion, without committing to a larger project. Notification groups are easy to join (just submit a PR!) and joining does not entail any particular commitment.
Once you join a notification group, you will be added to a list that receives pings on github whenever a new issue is found that fits the notification group's criteria. If you are interested, you can then claim the issue and start working on it.
Of course, you don't have to wait for new issues to be tagged! If you prefer, you can use the Github label for a notification group to search for existing issues that haven't been claimed yet.
List of notification groups
Here's the list of the notification groups:
What issues are a good fit for notification groups?
Notification groups tend to get pinged on isolated bugs, particularly those of middle priority:
- By isolated, we mean that we do not expect large-scale refactoring to be required to fix the bug.
- By middle priority, we mean that we'd like to see the bug fixed, but it's not such a burning problem that we are dropping everything else to fix it. The danger with such bugs, of course, is that they can accumulate over time, and the role of the notification group is to try and stop that from happening!
Joining a notification group
To join a notification group, you just have to open a PR adding your Github username to the appropriate file in the Rust team repository. See the "example PRs" below to get a precise idea and to identify the file to edit.
Also, if you are not already a member of a Rust team then -- in addition to adding your name to the file -- you have to checkout the repository and run the following command:
cargo run add-person $your_user_name
Example PRs:
- Example of adding yourself to the Apple group.
- Example of adding yourself to the ARM group.
- Example of adding yourself to the Cleanup Crew.
- Example of adding yourself to the Emscripten group.
- Example of adding yourself to the LLVM group.
- Example of adding yourself to the RISC-V group.
- Example of adding yourself to the WASI group.
- Example of adding yourself to the WebAssembly group.
- Example of adding yourself to the Windows group.
Tagging an issue for a notification group
To tag an issue as appropriate for a notification group, you give
rustbot a ping command with the name of the notification
group. For example:
@rustbot ping apple
@rustbot ping arm
@rustbot ping cleanup-crew
@rustbot ping emscripten
@rustbot ping llvm
@rustbot ping risc-v
@rustbot ping wasi
@rustbot ping wasm
@rustbot ping windows
To make some commands shorter and easier to remember, there are aliases,
defined in the triagebot.toml file. For example, all of these commands
are equivalent and will ping the Cleanup Crew:
@rustbot ping cleanup
@rustbot ping bisect
@rustbot ping reduce
Keep in mind that these aliases are meant to make humans' life easier. They might be subject to change. If you need to ensure that a command will always be valid, prefer the full invocations over the aliases.
Note though that this should only be done by compiler team members or contributors, and is typically done as part of compiler team triage.
Apple notification group
Github Labels: O-macos, O-ios, O-tvos, O-watchos and O-visionos
Ping command: @rustbot ping apple
This list will be used to ask for help both in diagnosing and testing Apple-related issues as well as suggestions on how to resolve interesting questions regarding our macOS/iOS/tvOS/watchOS/visionOS support.
To get a better idea for what the group will do, here are some examples of the kinds of questions where we would have reached out to the group for advice in determining the best course of action:
- Raising the minimum supported versions (e.g. #104385)
- Additional Apple targets (e.g. #121419)
- Obscure Xcode linker details (e.g. #121430)
Deployment targets
Apple platforms have a concept of "deployment target", controlled with the
*_DEPLOYMENT_TARGET environment variables, and specifies the minimum OS
version that a binary runs on.
Using an API from a newer OS version in the standard library than the default
that rustc uses will result in either a static or a dynamic linker error.
For this reason, try to suggest that people document on extern "C" APIs
which OS version they were introduced with, and if that's newer than the
current default used by rustc, suggest to use weak linking.
The App Store and private APIs
Apple are very protective about using undocumented APIs, so it's important that whenever a change uses a new function, that they are verified to actually be public API, as even just mentioning undocumented APIs in the binary (without calling it) can lead to rejections from the App Store.
For example, Darwin / the XNU kernel actually has futex syscalls, but we can't
use them in std because they are not public API.
In general, for an API to be considered public by Apple, it has to:
- Appear in a public header (i.e. one distributed with Xcode, and found for
the specific platform under
xcrun --show-sdk-path --sdk $SDK). - Have an availability attribute on it (like
__API_AVAILABLE,API_AVAILABLEor similar).
ARM notification group
Github Label: O-ARM
Ping command: @rustbot ping arm
This list will be used to ask for help both in diagnosing and testing ARM-related issues as well as suggestions on how to resolve interesting questions regarding our ARM support.
The group also has an associated Zulip stream (#t-compiler/arm)
where people can go to pose questions and discuss ARM-specific
topics.
So, if you are interested in participating, please sign up for the ARM group! To do so, open a PR against the rust-lang/team repository. Just follow this example, but change the username to your own!
Cleanup Crew
Github Label: ICEBreaker-Cleanup-Crew
Ping command: @rustbot ping cleanup-crew
The "Cleanup Crew" are focused on improving bug reports. Specifically, the goal is to try to ensure that every bug report has all the information that will be needed for someone to fix it:
- a minimal, standalone example that shows the problem
- links to duplicates or related bugs
- if the bug is a regression (something that used to work, but no longer does), then a bisection to the PR or nightly that caused the regression
This kind of cleanup is invaluable in getting bugs fixed. Better still, it can be done by anybody who knows Rust, without any particularly deep knowledge of the compiler.
Let's look a bit at the workflow for doing "cleanup crew" actions.
Finding a minimal, standalone example
Here the ultimate goal is to produce an example that reproduces the same problem but without relying on any external crates. Such a test ought to contain as little code as possible, as well. This will make it much easier to isolate the problem.
However, even if the "ultimate minimal test" cannot be achieved, it's still useful to post incremental minimizations. For example, if you can eliminate some of the external dependencies, that is helpful, and so forth.
It's particularly useful to reduce to an example that works in the Rust playground, rather than requiring people to checkout a cargo build.
There are many resources for how to produce minimized test cases. Here are a few:
- The rust-reduce tool can try to reduce code automatically.
- pnkfelix's Rust Bug Minimization Patterns blog post
- This post focuses on "heavy bore" techniques, where you are starting with a large, complex cargo project that you wish to narrow down to something standalone.
Links to duplicate or related bugs
If you are on the "Cleanup Crew", you will sometimes see multiple bug reports that seem very similar. You can link one to the other just by mentioning the other bug number in a Github comment. Sometimes it is useful to close duplicate bugs. But if you do so, you should always copy any test case from the bug you are closing to the other bug that remains open, as sometimes duplicate-looking bugs will expose different facets of the same problem.
Bisecting regressions
For regressions (something that used to work, but no longer does), it is super useful if we can figure out precisely when the code stopped working. The gold standard is to be able to identify the precise PR that broke the code, so we can ping the author, but even narrowing it down to a nightly build is helpful, especially as that then gives us a range of PRs. (One other challenge is that we sometimes land "rollup" PRs, which combine multiple PRs into one.)
cargo-bisect-rustc
To help in figuring out the cause of a regression we have a tool called cargo-bisect-rustc. It will automatically download and test various builds of rustc. For recent regressions, it is even able to use the builds from our CI to track down the regression to a specific PR; for older regressions, it will simply identify a nightly.
To learn to use cargo-bisect-rustc, check out this blog post, which
gives a quick introduction to how it works. Additionally, there is a Guide
which goes into more detail on how to use it. You can also ask questions at
the Zulip stream #t-compiler/cargo-bisect-rustc, or help in
improving the tool.
Emscripten notification group
Github Label: O-emscripten
Ping command: @rustbot ping emscripten
This list will be used to ask for help both in diagnosing and testing Emscripten-related issues as well as suggestions on how to resolve interesting questions regarding our Emscripten support.
The group also has an associated Zulip stream (#t-compiler/wasm)
where people can go to pose questions and discuss Emscripten-specific
topics.
So, if you are interested in participating, please sign up for the Emscripten group! To do so, open a PR against the rust-lang/team repository. Just follow this example, but change the username to your own!
LLVM Notification group
Github Label: A-LLVM
Ping command: @rustbot ping llvm
The "LLVM Notification Group" are focused on bugs that center around LLVM. These bugs often arise because of LLVM optimizations gone awry, or as the result of an LLVM upgrade. The goal here is:
- to determine whether the bug is a result of us generating invalid LLVM IR, or LLVM misoptimizing;
- if the former, to fix our IR;
- if the latter, to try and file a bug on LLVM (or identify an existing bug).
The group may also be asked to weigh in on other sorts of LLVM-focused questions.
Helpful tips and options
The "Debugging LLVM" section of the
rustc-dev-guide gives a step-by-step process for how to help debug bugs
caused by LLVM. In particular, it discusses how to emit LLVM IR, run
the LLVM IR optimization pipelines, and so forth. You may also find
it useful to look at the various codegen options listed under -C help
and the internal options under -Z help -- there are a number that
pertain to LLVM (just search for LLVM).
If you do narrow to an LLVM bug
The "Debugging LLVM" section also describes what to do once you've identified the bug.
RISC-V notification group
Github Label: O-riscv
Ping command: @rustbot ping risc-v
This list will be used to ask for help both in diagnosing and testing RISC-V-related issues as well as suggestions on how to resolve interesting questions regarding our RISC-V support.
The group also has an associated Zulip stream (#t-compiler/risc-v)
where people can go to pose questions and discuss RISC-V-specific
topics.
So, if you are interested in participating, please sign up for the RISC-V group! To do so, open a PR against the rust-lang/team repository. Just follow this example, but change the username to your own!
WASI notification group
Github Label: O-wasi
Ping command: @rustbot ping wasi
This list will be used to ask for help both in diagnosing and testing WASI-related issues as well as suggestions on how to resolve interesting questions regarding our WASI support.
The group also has an associated Zulip stream (#t-compiler/wasm)
where people can go to pose questions and discuss WASI-specific
topics.
So, if you are interested in participating, please sign up for the WASI group! To do so, open a PR against the rust-lang/team repository. Just follow this example, but change the username to your own!
WebAssembly (WASM) notification group
Github Label: O-wasm
Ping command: @rustbot ping wasm
This list will be used to ask for help both in diagnosing and testing WebAssembly-related issues as well as suggestions on how to resolve interesting questions regarding our WASM support.
The group also has an associated Zulip stream (#t-compiler/wasm)
where people can go to pose questions and discuss WASM-specific
topics.
So, if you are interested in participating, please sign up for the WASM group! To do so, open a PR against the rust-lang/team repository. Just follow this example, but change the username to your own!
Windows notification group
Github Label: O-Windows
Ping command: @rustbot ping windows
This list will be used to ask for help both in diagnosing and testing Windows-related issues as well as suggestions on how to resolve interesting questions regarding our Windows support.
The group also has an associated Zulip stream (#t-compiler/windows)
where people can go to pose questions and discuss Windows-specific
topics.
To get a better idea for what the group will do, here are some examples of the kinds of questions where we would have reached out to the group for advice in determining the best course of action:
- Which versions of MinGW should we support?
- Should we remove the legacy InnoSetup GUI installer? #72569
- What names should we use for static libraries on Windows? #29520
So, if you are interested in participating, please sign up for the Windows group! To do so, open a PR against the rust-lang/team repository. Just follow this example, but change the username to your own!
Rust for Linux notification group
Github Label: O-rfl
Ping command: @rustbot ping rfl
This list will be used to notify Rust for Linux (RfL) maintainers when the compiler or the standard library changes in a way that would break Rust for Linux, since it depends on several unstable flags and features. The RfL maintainers should then ideally provide support for resolving the breakage or decide to temporarily accept the breakage and unblock CI by temporarily removing the RfL CI jobs.
The group also has an associated Zulip stream (#rust-for-linux)
where people can go to ask questions and discuss topics related to Rust
for Linux.
If you are interested in participating, please sign up for the Rust for Linux group on Zulip!
rust-lang/rust Licenses
The rustc compiler source and standard library are dual licensed under the Apache License v2.0 and the MIT License unless otherwise specified.
Detailed licensing information is available in the COPYRIGHT document of the rust-lang/rust repository.
Guidelines for reviewers
In general, reviewers need to be looking not only for the code quality of contributions but also that they are properly licensed. We have some tips below for things to look out for when reviewing, but if you ever feel uncertain as to whether some code might be properly licensed, err on the safe side — reach out to the Council or Compiler Team Leads for feedback!
Things to watch out for:
- The PR author states that they copied, ported, or adapted the code from some other source.
- There is a comment in the code pointing to a webpage or describing where the algorithm was taken from.
- The algorithm or code pattern seems like it was likely copied from somewhere else.
- When adding new dependencies, double check the dependency's license.
In all of these cases, we will want to check that source to make sure it is licensed in a way that is compatible with Rust’s license.
Examples
- Porting C code from a GPL project, like GNU binutils, is not allowed. That would require Rust itself to be licensed under the GPL.
- Copying code from an algorithms text book may be allowed, but some algorithms are patented.
Porting
Contributions to rustc, especially around platform and compiler intrinsics, often include porting over work from other projects, mainly LLVM and GCC.
Some general rules apply:
- Copying work needs to adhere to the original license
- This applies to direct copy & paste
- This also applies to code you looked at and ported
In general, taking inspiration from other codebases is fine, but please exercise caution when porting code.
Ports of full libraries (e.g. C libraries shipped with LLVM) must keep the license of the original library.
Editions
This chapter gives an overview of how Edition support works in rustc. This assumes that you are familiar with what Editions are (see the Edition Guide).
Edition definition
The --edition CLI flag specifies the edition to use for a crate.
This can be accessed from Session::edition.
There are convenience functions like Session::at_least_rust_2021 for checking the crate's
edition, though you should be careful about whether you check the global session or the span, see
Edition hygiene below.
As an alternative to the at_least_rust_20xx convenience methods, the Edition type also
supports comparisons for doing range checks, such as span.edition() >= Edition::Edition2021.
Adding a new edition
Adding a new edition mainly involves adding a variant to the Edition enum and then fixing
everything that is broken. See #94461 for an
example.
Features and Edition stability
The Edition enum defines whether or not an edition is stable.
If it is not stable, then the -Zunstable-options CLI option must be passed to enable it.
When adding a new feature, there are two options you can choose for how to handle stability with a future edition:
- Just check the edition of the span like
span.at_least_rust_20xx()(see Edition hygiene) or theSession::edition. This will implicitly depend on the stability of the edition itself to indicate that your feature is available. - Place your new behavior behind a feature gate.
It may be sufficient to only check the current edition for relatively simple changes. However, for larger language changes, you should consider creating a feature gate. There are several benefits to using a feature gate:
- A feature gate makes it easier to work on and experiment with a new feature.
- It makes the intent clear when the
#![feature(…)]attribute is used that your new feature is being enabled. - It makes testing of editions easier so that features that are not yet complete do not interfere with testing of edition-specific features that are complete and ready.
- It decouples the feature from an edition, which makes it easier for the team to make a deliberate decision of whether or not a feature should be added to the next edition when the feature is ready.
When a feature is complete and ready, the feature gate can be removed (and the code should just
check the span or Session edition to determine if it is enabled).
There are a few different options for doing feature checks:
-
For highly experimental features, that may or may not be involved in an edition, they can implement regular feature gates like
tcx.features().my_feature, and ignore editions for the time being. -
For experimental features that might be involved in an edition, they should implement gates with
tcx.features().my_feature && span.at_least_rust_20xx(). This requires the user to still specify#![feature(my_feature)], to avoid disrupting testing of other edition features which are ready and have been accepted within the edition. -
For experimental features that have graduated to definitely be part of an edition, they should implement gates with
tcx.features().my_feature || span.at_least_rust_20xx(), or just remove the feature check altogether and just checkspan.at_least_rust_20xx().
If you need to do the feature gating in multiple places, consider placing the check in a single function so that there will only be a single place to update. For example:
// An example from Edition 2021 disjoint closure captures.
fn enable_precise_capture(tcx: TyCtxt<'_>, span: Span) -> bool {
tcx.features().capture_disjoint_fields || span.rust_2021()
}
See Lints and stability below for more information about how lints handle stability.
Edition parsing
For the most part, the lexer is edition-agnostic.
Within StringReader, tokens can be modified based on edition-specific behavior.
For example, C-String literals like c"foo" are split into multiple tokens in editions before 2021.
This is also where things like reserved prefixes are handled for the 2021 edition.
Edition-specific parsing is relatively rare. One example is async fn which checks the span of the
token to determine if it is the 2015 edition, and emits an error in that case.
This can only be done if the syntax was already invalid.
If you need to do edition checking in the parser, you will normally want to look at the edition of
the token, see Edition hygiene.
In some rare cases you may instead need to check the global edition from ParseSess::edition.
Most edition-specific parsing behavior is handled with migration lints instead of in the parser.
This is appropriate when there is a change in syntax (as opposed to new syntax).
This allows the old syntax to continue to work on previous editions.
The lint then checks for the change in behavior.
On older editions, the lint pass should emit the migration lint to help with migrating to new
editions.
On newer editions, your code should emit a hard error with emit_err instead.
For example, the deprecated start...end pattern syntax emits the
ellipsis_inclusive_range_patterns lint on editions before 2021, and in 2021 is an hard error via
the emit_err method.
Keywords
New keywords can be introduced across an edition boundary.
This is implemented by functions like Symbol::is_used_keyword_conditional, which rely on the
ordering of how the keywords are defined.
When new keywords are introduced, the keyword_idents lint should be updated so that automatic
migrations can transition code that might be using the keyword as an identifier (see
KeywordIdents).
An alternative to consider is to implement the keyword as a weak keyword if the position it is used
is sufficient to distinguish it.
An additional option to consider is the k# prefix which was introduced in RFC 3101.
This allows the use of a keyword in editions before the edition where the keyword is introduced.
This is currently not implemented.
Edition hygiene
Spans are marked with the edition of the crate that the span came from. See Macro hygiene in the Edition Guide for a user-centric description of what this means.
You should normally use the edition from the token span instead of looking at the global Session
edition.
For example, use span.edition().at_least_rust_2021() instead of sess.at_least_rust_2021().
This helps ensure that macros behave correctly when used across crates.
Lints
Lints support a few different options for interacting with editions. Lints can be future incompatible edition migration lints, which are used to support migrations to newer editions. Alternatively, lints can be edition-specific, where they change their default level starting in a specific edition.
Migration lints
Migration lints are used to migrate projects from one edition to the next.
They are implemented with a MachineApplicable suggestion which
will rewrite code so that it will successfully compile in both the previous and the next
edition.
For example, the keyword_idents lint will take identifiers that conflict with a new keyword to
use the raw identifier syntax to avoid the conflict (for example changing async to r#async).
Migration lints must be declared with the FutureIncompatibilityReason::EditionError or
FutureIncompatibilityReason::EditionSemanticsChange future-incompatible
option in the lint declaration:
declare_lint! {
pub KEYWORD_IDENTS,
Allow,
"detects edition keywords being used as an identifier",
@future_incompatible = FutureIncompatibleInfo {
reason: FutureIncompatibilityReason::EditionError(Edition::Edition2018),
reference: "issue #49716 <https://github.com/rust-lang/rust/issues/49716>",
};
}
When declared like this, the lint is automatically added to the appropriate
rust-20xx-compatibility lint group.
When a user runs cargo fix --edition, cargo will pass the --force-warn rust-20xx-compatibility
flag to force all of these lints to appear during the edition migration.
Cargo also passes --cap-lints=allow so that no other lints interfere with the edition migration.
Migration lints can be either Allow or Warn by default.
If it is Allow, users usually won't see this warning unless they are doing an edition migration
manually or there is a problem during the migration.
Most migration lints are Allow.
If it is Warn by default, users on all editions will see this warning.
Only use Warn if you think it is important for everyone to be aware of the change, and to
encourage people to update their code on all editions.
Beware that new warn-by-default lint that hit many projects can be very disruptive and frustrating
for users.
You may consider switching an Allow to Warn several years after the edition stabilizes.
This will only show up for the relatively small number of stragglers who have not updated to the new
edition.
Edition-specific lints
Lints can be marked so that they have a different level starting in a specific edition.
In the lint declaration, use the @edition marker:
declare_lint! {
pub SOME_LINT_NAME,
Allow,
"my lint description",
@edition Edition2024 => Warn;
}
Here, SOME_LINT_NAME defaults to Allow on all editions before 2024, and then becomes Warn
afterwards.
This should generally be used sparingly, as there are other options:
-
Small impact stylistic changes unrelated to an edition can just make the lint
Warnon all editions. If you want people to adopt a different way to write things, then go ahead and commit to having it show up for all projects.Beware that if a new warn-by-default lint hits many projects, it can be very disruptive and frustrating for users.
-
Change the new style to be a hard error in the new edition, and use a migration lint to automatically convert projects to the new style. For example,
ellipsis_inclusive_range_patternsis a hard error in 2021, and warns in all previous editions.Beware that these cannot be added after the edition stabilizes.
-
Migration lints can also change over time. For example, the migration lint can start out as
Allowby default. For people performing the migration, they will automatically get updated to the new code. Then, after some years, the lint can be made toWarnin previous editions.For example
anonymous_parameterswas a 2018 Edition migration lint (and a hard-error in 2018) that wasAllowby default in previous editions. Then, three years later, it was changed toWarnfor all previous editions, so that all users got a warning that the style was being phased out. If this was a warning from the start, it would have impacted many projects and be very disruptive. By making it part of the edition, most users eventually updated to the new edition and were handled by the migration. Switching toWarnonly impacted a few stragglers who did not update.
Lints and stability
Lints can be marked as being unstable, which can be helpful when developing a new edition feature, and you want to test out a migration lint. The feature gate can be specified in the lint's declaration like this:
declare_lint! {
pub SOME_LINT_NAME,
Allow,
"my cool lint",
@feature_gate = sym::my_feature_name;
}
Then, the lint will only fire if the user has the appropriate #![feature(my_feature_name)].
Just beware that when it comes time to do crater runs testing the migration that the feature gate
will need to be removed.
Alternatively, you can implement an allow-by-default migration lint for an upcoming unstable edition without a feature gate. Although users may technically be able to enable the lint before the edition is stabilized, most will not notice the new lint exists, and it should not disrupt anything or cause any breakage.
Idiom lints
In the 2018 edition, there was a concept of "idiom lints" under the rust-2018-idioms lint group.
The concept was to have new idiomatic styles under a different lint group separate from the forced
migrations under the rust-2018-compatibility lint group, giving some flexibility as to how people
opt-in to certain edition changes.
Overall this approach did not seem to work very well, and it is unlikely that we will use the idiom groups in the future.
Standard library changes
Preludes
Each edition comes with a specific prelude of the standard library.
These are implemented as regular modules in core::prelude and std::prelude.
New items can be added to the prelude, just beware that this can conflict with user's pre-existing
code.
Usually a migration lint should be used to migrate existing code to avoid the conflict.
For example, rust_2021_prelude_collisions is used to handle the collisions with the new traits
in 2021.
Customized language behavior
Usually it is not possible to make breaking changes to the standard library. In some rare cases, the teams may decide that the behavior change is important enough to break this rule. The downside is that this requires special handling in the compiler to be able to distinguish when the old and new signatures or behaviors should be used.
One example is the change in method resolution for into_iter() of arrays.
This was implemented with the #[rustc_skip_array_during_method_dispatch] attribute on the
IntoIterator trait which then tells the compiler to consider an alternate trait resolution choice
based on the edition.
Another example is the panic! macro changes.
This required defining multiple panic macros, and having the built-in panic macro implementation
determine the appropriate way to expand it.
This also included the non_fmt_panics migration lint to adjust old code to the new form, which
required the rustc_diagnostic_item attribute to detect the usage of the panic macro.
In general it is recommended to avoid these special cases except for very high value situations.
Bootstrapping the compiler
Bootstrapping is the process of using a compiler to compile itself. More accurately, it means using an older compiler to compile a newer version of the same compiler.
This raises a chicken-and-egg paradox: where did the first compiler come from? It must have been written in a different language. In Rust's case it was written in OCaml. However it was abandoned long ago and the only way to build a modern version of rustc is a slightly less modern version.
This is exactly how x.py works: it downloads the current beta release of
rustc, then uses it to compile the new compiler.
In this section, we give a high-level overview of what Bootstrap does, followed by a high-level introduction to how Bootstrap does it.
What Bootstrapping does
- Stages of bootstrapping
- Complications of bootstrapping
- Understanding stages of bootstrap
- Passing flags to commands invoked by
bootstrap - Environment Variables
- Clarification of build command's
stdout
Bootstrapping is the process of using a compiler to compile itself. More accurately, it means using an older compiler to compile a newer version of the same compiler.
This raises a chicken-and-egg paradox: where did the first compiler come from?
It must have been written in a different language. In Rust's case it was
written in OCaml. However it was abandoned long ago and the
only way to build a modern version of rustc is a slightly less modern version.
This is exactly how ./x.py works: it downloads the current beta release of
rustc, then uses it to compile the new compiler.
Note that this documentation mostly covers user-facing information. See bootstrap/README.md to read about bootstrap internals.
Stages of bootstrapping
Overview
- Stage 0: the pre-compiled compiler
- Stage 1: from current code, by an earlier compiler
- Stage 2: the truly current compiler
- Stage 3: the same-result test
Compiling rustc is done in stages. Here's a diagram, adapted from Jynn
Nelson's talk on bootstrapping at RustConf 2022, with
detailed explanations below.
The A, B, C, and D show the ordering of the stages of bootstrapping.
Blue nodes are
downloaded, yellow
nodes are built with the stage0 compiler, and green nodes are built with the stage1
compiler.
graph TD
s0c["stage0 compiler (1.63)"]:::downloaded -->|A| s0l("stage0 std (1.64)"):::with-s0c;
s0c & s0l --- stepb[ ]:::empty;
stepb -->|B| s0ca["stage0 compiler artifacts (1.64)"]:::with-s0c;
s0ca -->|copy| s1c["stage1 compiler (1.64)"]:::with-s0c;
s1c -->|C| s1l("stage1 std (1.64)"):::with-s1c;
s1c & s1l --- stepd[ ]:::empty;
stepd -->|D| s1ca["stage1 compiler artifacts (1.64)"]:::with-s1c;
s1ca -->|copy| s2c["stage2 compiler"]:::with-s1c;
classDef empty width:0px,height:0px;
classDef downloaded fill: lightblue;
classDef with-s0c fill: yellow;
classDef with-s1c fill: lightgreen;
Stage 0: the pre-compiled compiler
The stage0 compiler is usually the current beta rustc compiler and its
associated dynamic libraries, which ./x.py will download for you. (You can
also configure ./x.py to use something else.)
The stage0 compiler is then used only to compile src/bootstrap,
library/std, and compiler/rustc. When assembling the libraries and
binaries that will become the stage1 rustc compiler, the freshly compiled
std and rustc are used. There are two concepts at play here: a compiler
(with its set of dependencies) and its 'target' or 'object' libraries (std and
rustc). Both are staged, but in a staggered manner.
Stage 1: from current code, by an earlier compiler
The rustc source code is then compiled with the stage0 compiler to produce the
stage1 compiler.
Stage 2: the truly current compiler
We then rebuild our stage1 compiler with itself to produce the stage2
compiler.
In theory, the stage1 compiler is functionally identical to the stage2
compiler, but in practice there are subtle differences. In particular, the
stage1 compiler itself was built by stage0 and hence not by the source in
your working directory. This means that the ABI generated by the stage0
compiler may not match the ABI that would have been made by the stage1
compiler, which can cause problems for dynamic libraries, tests, and tools using
rustc_private.
Note that the proc_macro crate avoids this issue with a C FFI layer called
proc_macro::bridge, allowing it to be used with stage1.
The stage2 compiler is the one distributed with rustup and all other install
methods. However, it takes a very long time to build because one must first
build the new compiler with an older compiler and then use that to build the new
compiler with itself. For development, you usually only want the stage1
compiler, which you can build with ./x build library. See Building the
compiler.
Stage 3: the same-result test
Stage 3 is optional. To sanity check our new compiler we can build the libraries
with the stage2 compiler. The result ought to be identical to before, unless
something has broken.
Building the stages
The script ./x tries to be helpful and pick the stage you most likely meant
for each subcommand. These defaults are as follows:
check:--stage 0doc:--stage 0build:--stage 1test:--stage 1dist:--stage 2install:--stage 2bench:--stage 2
You can always override the stage by passing --stage N explicitly.
For more information about stages, see below.
Complications of bootstrapping
Since the build system uses the current beta compiler to build a stage1
bootstrapping compiler, the compiler source code can't use some features until
they reach beta (because otherwise the beta compiler doesn't support them). On
the other hand, for compiler intrinsics and internal features, the
features have to be used. Additionally, the compiler makes heavy use of
nightly features (#![feature(...)]). How can we resolve this problem?
There are two methods used:
- The build system sets
--cfg bootstrapwhen building withstage0, so we can usecfg(not(bootstrap))to only use features when built withstage1. Setting--cfg bootstrapin this way is used for features that were just stabilized, which require#![feature(...)]when built withstage0, but not forstage1. - The build system sets
RUSTC_BOOTSTRAP=1. This special variable means to break the stability guarantees of Rust: allowing use of#![feature(...)]with a compiler that's notnightly. SettingRUSTC_BOOTSTRAP=1should never be used except when bootstrapping the compiler.
Understanding stages of bootstrap
Overview
This is a detailed look into the separate bootstrap stages.
The convention ./x uses is that:
- A
--stage Nflag means to run the stage N compiler (stageN/rustc). - A "stage N artifact" is a build artifact that is produced by the stage N compiler.
- The stage N+1 compiler is assembled from stage N artifacts. This process is called uplifting.
Build artifacts
Anything you can build with ./x is a build artifact. Build artifacts
include, but are not limited to:
- binaries, like
stage0-rustc/rustc-main - shared objects, like
stage0-sysroot/rustlib/libstd-6fae108520cf72fe.so - rlib files, like
stage0-sysroot/rustlib/libstd-6fae108520cf72fe.rlib - HTML files generated by rustdoc, like
doc/std
Examples
./x test tests/uimeans to build thestage1compiler and runcompileteston it. If you're working on the compiler, this is normally the test command you want../x test --stage 0 library/stdmeans to run tests on the standard library without buildingrustcfrom source ('build withstage0, then test the artifacts'). If you're working on the standard library, this is normally the test command you want../x build --stage 0means to build with the betarustc../x doc --stage 0means to document using the betarustdoc.
Examples of what not to do
./x test --stage 0 tests/uiis not useful: it runs tests on the beta compiler and doesn't buildrustcfrom source. Usetest tests/uiinstead, which buildsstage1from source../x test --stage 0 compiler/rustcbuilds the compiler but runs no tests: it's runningcargo test -p rustc, butcargodoesn't understand Rust's tests. You shouldn't need to use this, usetestinstead (without arguments)../x build --stage 0 compiler/rustcbuilds the compiler, but does not buildlibstdor evenlibcore. Most of the time, you'll want./x build libraryinstead, which allows compiling programs without needing to define lang items.
Building vs. running
Note that build --stage N compiler/rustc does not build the stage N
compiler: instead it builds the stage N+1 compiler using the stage N compiler.
In short, stage 0 uses the stage0 compiler to create stage0 artifacts which
will later be uplifted to be the stage1 compiler.
In each stage, two major steps are performed:
stdis compiled by the stage N compiler.- That
stdis linked to programs built by the stage N compiler, including the stage N artifacts (stage N+1 compiler).
This is somewhat intuitive if one thinks of the stage N artifacts as "just"
another program we are building with the stage N compiler: build --stage N compiler/rustc is linking the stage N artifacts to the std built by the stage
N compiler.
Stages and std
Note that there are two std libraries in play here:
- The library linked to
stageN/rustc, which was built by stage N-1 (stage N-1std) - The library used to compile programs with
stageN/rustc, which was built by stage N (stage Nstd).
Stage N std is pretty much necessary for any useful work with the stage N
compiler. Without it, you can only compile programs with #![no_core] -- not
terribly useful!
The reason these need to be different is because they aren't necessarily
ABI-compatible: there could be new layout optimizations, changes to MIR, or
other changes to Rust metadata on nightly that aren't present in beta.
This is also where --keep-stage 1 library/std comes into play. Since most
changes to the compiler don't actually change the ABI, once you've produced a
std in stage1, you can probably just reuse it with a different compiler. If
the ABI hasn't changed, you're good to go, no need to spend time recompiling
that std. The flag --keep-stage simply instructs the build script to assumes
the previous compile is fine and copies those artifacts into the appropriate
place, skipping the cargo invocation.
Cross-compiling rustc
Cross-compiling is the process of compiling code that will run on another
architecture. For instance, you might want to build an ARM version of rustc
using an x86 machine. Building stage2 std is different when you are
cross-compiling.
This is because ./x uses the following logic: if HOST and TARGET are the
same, it will reuse stage1 std for stage2! This is sound because stage1
std was compiled with the stage1 compiler, i.e. a compiler using the source
code you currently have checked out. So it should be identical (and therefore
ABI-compatible) to the std that stage2/rustc would compile.
However, when cross-compiling, stage1 std will only run on the host. So the
stage2 compiler has to recompile std for the target.
(See in the table how stage2 only builds non-host std targets).
Why does only libstd use cfg(bootstrap)?
For docs on cfg(bootstrap) itself, see Complications of
Bootstrapping.
The rustc generated by the stage0 compiler is linked to the freshly-built
std, which means that for the most part only std needs to be cfg-gated, so
that rustc can use features added to std immediately after their addition,
without need for them to get into the downloaded beta compiler.
Note this is different from any other Rust program: stage1 rustc is built by
the beta compiler, but using the master version of libstd!
The only time rustc uses cfg(bootstrap) is when it adds internal lints that
use diagnostic items, or when it uses unstable library features that were
recently changed.
What is a 'sysroot'?
When you build a project with cargo, the build artifacts for dependencies are
normally stored in target/debug/deps. This only contains dependencies cargo
knows about; in particular, it doesn't have the standard library. Where do std
or proc_macro come from? They comes from the sysroot, the root of a number
of directories where the compiler loads build artifacts at runtime. The
sysroot doesn't just store the standard library, though - it includes anything
that needs to be loaded at runtime. That includes (but is not limited to):
- Libraries
libstd/libtest/libproc_macro. - Compiler crates themselves, when using
rustc_private. In-tree these are always present; out of tree, you need to installrustc-devwithrustup. - Shared object file
libLLVM.sofor the LLVM project. In-tree this is either built from source or downloaded from CI; out-of-tree, you need to installllvm-tools-previewwithrustup.
All the artifacts listed so far are compiler runtime dependencies. You can see
them with rustc --print sysroot:
$ ls $(rustc --print sysroot)/lib
libchalk_derive-0685d79833dc9b2b.so libstd-25c6acf8063a3802.so
libLLVM-11-rust-1.50.0-nightly.so libtest-57470d2aa8f7aa83.so
librustc_driver-4f0cc9f50e53f0ba.so libtracing_attributes-e4be92c35ab2a33b.so
librustc_macros-5f0ec4a119c6ac86.so rustlib
There are also runtime dependencies for the standard library! These are in
lib/rustlib/, not lib/ directly.
$ ls $(rustc --print sysroot)/lib/rustlib/x86_64-unknown-linux-gnu/lib | head -n 5
libaddr2line-6c8e02b8fedc1e5f.rlib
libadler-9ef2480568df55af.rlib
liballoc-9c4002b5f79ba0e1.rlib
libcfg_if-512eb53291f6de7e.rlib
libcompiler_builtins-ef2408da76957905.rlib
Directory lib/rustlib/ includes libraries like hashbrown and cfg_if, which
are not part of the public API of the standard library, but are used to
implement it. Also lib/rustlib/ is part of the search path for linkers, but
lib will never be part of the search path.
-Z force-unstable-if-unmarked
Since lib/rustlib/ is part of the search path we have to be careful about
which crates are included in it. In particular, all crates except for the
standard library are built with the flag -Z force-unstable-if-unmarked, which
means that you have to use #![feature(rustc_private)] in order to load it (as
opposed to the standard library, which is always available).
The -Z force-unstable-if-unmarked flag has a variety of purposes to help
enforce that the correct crates are marked as unstable. It was introduced
primarily to allow rustc and the standard library to link to arbitrary crates on
crates.io which do not themselves use staged_api. rustc also relies on this
flag to mark all of its crates as unstable with the rustc_private feature so
that each crate does not need to be carefully marked with unstable.
This flag is automatically applied to all of rustc and the standard library by
the bootstrap scripts. This is needed because the compiler and all of its
dependencies are shipped in sysroot to all users.
This flag has the following effects:
- Marks the crate as "
unstable" with therustc_privatefeature if it is not itself marked asstableorunstable. - Allows these crates to access other forced-unstable crates without any need
for attributes. Normally a crate would need a
#![feature(rustc_private)]attribute to use otherunstablecrates. However, that would make it impossible for a crate from crates.io to access its own dependencies since that crate won't have afeature(rustc_private)attribute, but everything is compiled with-Z force-unstable-if-unmarked.
Code which does not use -Z force-unstable-if-unmarked should include the
#![feature(rustc_private)] crate attribute to access these forced-unstable
crates. This is needed for things which link rustc its self, such as MIRI or
clippy.
You can find more discussion about sysroots in:
- The rustdoc PR explaining why it uses
extern cratefor dependencies loaded fromsysroot - Discussions about sysroot on Zulip
- Discussions about building rustdoc out of tree
Passing flags to commands invoked by bootstrap
Conveniently ./x allows you to pass stage-specific flags to rustc and
cargo when bootstrapping. The RUSTFLAGS_BOOTSTRAP environment variable is
passed as RUSTFLAGS to the bootstrap stage (stage0), and
RUSTFLAGS_NOT_BOOTSTRAP is passed when building artifacts for later stages.
RUSTFLAGS will work, but also affects the build of bootstrap itself, so it
will be rare to want to use it. Finally, MAGIC_EXTRA_RUSTFLAGS bypasses the
cargo cache to pass flags to rustc without recompiling all dependencies.
RUSTDOCFLAGS,RUSTDOCFLAGS_BOOTSTRAPandRUSTDOCFLAGS_NOT_BOOTSTRAPare analogous toRUSTFLAGS, but forrustdoc.CARGOFLAGSwill pass arguments to cargo itself (e.g.--timings).CARGOFLAGS_BOOTSTRAPandCARGOFLAGS_NOT_BOOTSTRAPwork analogously toRUSTFLAGS_BOOTSTRAP.--test-argswill pass arguments through to the test runner. Fortests/ui, this iscompiletest. For unit tests and doc tests this is thelibtestrunner.
Most test runner accept --help, which you can use to find out the options
accepted by the runner.
Environment Variables
During bootstrapping, there are a bunch of compiler-internal environment
variables that are used. If you are trying to run an intermediate version of
rustc, sometimes you may need to set some of these environment variables
manually. Otherwise, you get an error like the following:
thread 'main' panicked at 'RUSTC_STAGE was not set: NotPresent', library/core/src/result.rs:1165:5
If ./stageN/bin/rustc gives an error about environment variables, that usually
means something is quite wrong -- such as you're trying to compile rustc or
std or something which depends on environment variables. In the unlikely case
that you actually need to invoke rustc in such a situation, you can tell the
bootstrap shim to print all env variables by adding -vvv to your x
command.
Finally, bootstrap makes use of the cc-rs crate which has its own
method of configuring C compilers and C flags via environment
variables.
Clarification of build command's stdout
In this part, we will investigate the build command's stdout in an action
(similar, but more detailed and complete documentation compare to topic above).
When you execute x build --dry-run command, the build output will be something
like the following:
Building stage0 library artifacts (x86_64-unknown-linux-gnu -> x86_64-unknown-linux-gnu)
Copying stage0 library from stage0 (x86_64-unknown-linux-gnu -> x86_64-unknown-linux-gnu / x86_64-unknown-linux-gnu)
Building stage0 compiler artifacts (x86_64-unknown-linux-gnu -> x86_64-unknown-linux-gnu)
Copying stage0 rustc from stage0 (x86_64-unknown-linux-gnu -> x86_64-unknown-linux-gnu / x86_64-unknown-linux-gnu)
Assembling stage1 compiler (x86_64-unknown-linux-gnu)
Building stage1 library artifacts (x86_64-unknown-linux-gnu -> x86_64-unknown-linux-gnu)
Copying stage1 library from stage1 (x86_64-unknown-linux-gnu -> x86_64-unknown-linux-gnu / x86_64-unknown-linux-gnu)
Building stage1 tool rust-analyzer-proc-macro-srv (x86_64-unknown-linux-gnu)
Building rustdoc for stage1 (x86_64-unknown-linux-gnu)
Building stage0 {std,compiler} artifacts
These steps use the provided (downloaded, usually) compiler to compile the local Rust source into libraries we can use.
Copying stage0 {std,rustc}
This copies the library and compiler artifacts from cargo into
stage0-sysroot/lib/rustlib/{target-triple}/lib
Assembling stage1 compiler
This copies the libraries we built in "building stage0 ... artifacts" into the
stage1 compiler's lib/ directory. These are the host libraries that the
compiler itself uses to run. These aren't actually used by artifacts the new
compiler generates. This step also copies the rustc and rustdoc binaries we
generated into build/$HOST/stage/bin.
The stage1/bin/rustc is a fully functional compiler, but it doesn't yet have
any libraries to link built binaries or libraries to. The next 3 steps will
provide those libraries for it; they are mostly equivalent to constructing the
stage1/bin compiler so we don't go through them individually here.
How Bootstrap does it
The core concept in Bootstrap is a build Step, which are chained together
by Builder::ensure. Builder::ensure takes a Step as input, and runs
the Step if and only if it has not already been run. Let's take a closer
look at Step.
Synopsis of Step
A Step represents a granular collection of actions involved in the process
of producing some artifact. It can be thought of like a rule in Makefiles.
The Step trait is defined as:
pub trait Step: 'static + Clone + Debug + PartialEq + Eq + Hash {
type Output: Clone;
const DEFAULT: bool = false;
const ONLY_HOSTS: bool = false;
// Required methods
fn run(self, builder: &Builder<'_>) -> Self::Output;
fn should_run(run: ShouldRun<'_>) -> ShouldRun<'_>;
// Provided method
fn make_run(_run: RunConfig<'_>) { ... }
}
runis the function that is responsible for doing the work.Builder::ensureinvokesrun.should_runis the command-line interface, which determines if an invocation such asx build fooshould run a givenStep. In a "default" context where no paths are provided, thenmake_runis called directly.make_runis invoked only for things directly asked via the CLI and not for steps which are dependencies of other steps.
The entry points
There's a couple of preliminary steps before core Bootstrap code is reached:
- Shell script or
make:./xor./x.ps1ormake - Convenience wrapper script:
x.py src/bootstrap/bootstrap.pysrc/bootstrap/src/bin/main.rs
See src/bootstrap/README.md for a more specific description of the implementation details.
High-Level Compiler Architecture
The remaining parts of this guide discuss how the compiler works. They go through everything from high-level structure of the compiler to how each stage of compilation works. They should be friendly to both readers interested in the end-to-end process of compilation and readers interested in learning about a specific system they wish to contribute to. If anything is unclear, feel free to file an issue on the rustc-dev-guide repo or contact the compiler team, as detailed in this chapter from Part 1.
In this part, we will look at the high-level architecture of the compiler. In particular, we will look at three overarching design choices that impact the whole compiler: the query system, incremental compilation, and interning.
Overview of the compiler
This chapter is about the overall process of compiling a program -- how everything fits together.
The Rust compiler is special in two ways: it does things to your code that other compilers don't do (e.g. borrow-checking) and it has a lot of unconventional implementation choices (e.g. queries). We will talk about these in turn in this chapter, and in the rest of the guide, we will look at the individual pieces in more detail.
What the compiler does to your code
So first, let's look at what the compiler does to your code. For now, we will avoid mentioning how the compiler implements these steps except as needed.
Invocation
Compilation begins when a user writes a Rust source program in text and invokes
the rustc compiler on it. The work that the compiler needs to perform is
defined by command-line options. For example, it is possible to enable nightly
features (-Z flags), perform check-only builds, or emit the LLVM
Intermediate Representation (LLVM-IR) rather than executable machine code.
The rustc executable call may be indirect through the use of cargo.
Command line argument parsing occurs in the rustc_driver. This crate
defines the compile configuration that is requested by the user and passes it
to the rest of the compilation process as a rustc_interface::Config.
Lexing and parsing
The raw Rust source text is analyzed by a low-level lexer located in
rustc_lexer. At this stage, the source text is turned into a stream of
atomic source code units known as tokens. The lexer supports the
Unicode character encoding.
The token stream passes through a higher-level lexer located in
rustc_parse to prepare for the next stage of the compile process. The
StringReader struct is used at this stage to perform a set of validations
and turn strings into interned symbols (interning is discussed later).
String interning is a way of storing only one immutable
copy of each distinct string value.
The lexer has a small interface and doesn't depend directly on the diagnostic
infrastructure in rustc. Instead it provides diagnostics as plain data which
are emitted in rustc_parse::lexer as real diagnostics. The lexer
preserves full fidelity information for both IDEs and procedural macros
(sometimes referred to as "proc-macros").
The parser translates the token stream from the lexer into an Abstract Syntax
Tree (AST). It uses a recursive descent (top-down) approach to syntax
analysis. The crate entry points for the parser are the
Parser::parse_crate_mod() and Parser::parse_mod()
methods found in rustc_parse::parser::Parser. The external module parsing
entry point is rustc_expand::module::parse_external_mod.
And the macro-parser entry point is Parser::parse_nonterminal().
Parsing is performed with a set of parser utility methods including bump,
check, eat, expect, look_ahead.
Parsing is organized by semantic construct. Separate
parse_* methods can be found in the rustc_parse
directory. The source file name follows the construct name. For example, the
following files are found in the parser:
This naming scheme is used across many compiler stages. You will find either a
file or directory with the same name across the parsing, lowering, type
checking, Typed High-level Intermediate Representation (THIR) lowering, and
Mid-level Intermediate Representation (MIR) building sources.
Macro-expansion, AST-validation, name-resolution, and early linting also take
place during the lexing and parsing stage.
The rustc_ast::ast::{Crate, Expr, Pat, ...} AST nodes are
returned from the parser while the standard Diag API is used
for error handling. Generally Rust's compiler will try to recover from errors
by parsing a superset of Rust's grammar, while also emitting an error type.
AST lowering
Next the AST is converted into High-Level Intermediate Representation
(HIR), a more compiler-friendly representation of the AST. This process
is called "lowering" and involves a lot of desugaring (the expansion and
formalizing of shortened or abbreviated syntax constructs) of things like loops
and async fn.
We then use the HIR to do type inference (the process of automatic
detection of the type of an expression), trait solving (the process of
pairing up an impl with each reference to a trait), and type checking. Type
checking is the process of converting the types found in the HIR (hir::Ty),
which represent what the user wrote, into the internal representation used by
the compiler (Ty<'tcx>). It's called type checking because the information
is used to verify the type safety, correctness and coherence of the types used
in the program.
MIR lowering
The HIR is further lowered to MIR
(used for borrow checking) by constructing the THIR (an even more desugared HIR used for
pattern and exhaustiveness checking) to convert into MIR.
We do many optimizations on the MIR because it is generic and that
improves later code generation and compilation speed. It is easier to do some
optimizations at MIR level than at LLVM-IR level. For example LLVM doesn't seem
to be able to optimize the pattern the simplify_try MIR-opt looks for.
Rust code is also monomorphized during code generation, which means making
copies of all the generic code with the type parameters replaced by concrete
types. To do this, we need to collect a list of what concrete types to generate
code for. This is called monomorphization collection and it happens at the
MIR level.
Code generation
We then begin what is simply called code generation or codegen. The code
generation stage is when higher-level representations of source are
turned into an executable binary. Since rustc uses LLVM for code generation,
the first step is to convert the MIR to LLVM-IR. This is where the MIR is
actually monomorphized. The LLVM-IR is passed to LLVM, which does a lot more
optimizations on it, emitting machine code which is basically assembly code
with additional low-level types and annotations added (e.g. an ELF object or
WASM). The different libraries/binaries are then linked together to produce
the final binary.
How it does it
Now that we have a high-level view of what the compiler does to your code, let's take a high-level view of how it does all that stuff. There are a lot of constraints and conflicting goals that the compiler needs to satisfy/optimize for. For example,
- Compilation speed: how fast is it to compile a program? More/better
compile-time analyses often means compilation is slower.
- Also, we want to support incremental compilation, so we need to take that
into account. How can we keep track of what work needs to be redone and
what can be reused if the user modifies their program?
- Also we can't store too much stuff in the incremental cache because it would take a long time to load from disk and it could take a lot of space on the user's system...
- Also, we want to support incremental compilation, so we need to take that
into account. How can we keep track of what work needs to be redone and
what can be reused if the user modifies their program?
- Compiler memory usage: while compiling a program, we don't want to use more memory than we need.
- Program speed: how fast is your compiled program? More/better compile-time analyses often means the compiler can do better optimizations.
- Program size: how large is the compiled binary? Similar to the previous point.
- Compiler compilation speed: how long does it take to compile the compiler? This impacts contributors and compiler maintenance.
- Implementation complexity: building a compiler is one of the hardest things a person/group can do, and Rust is not a very simple language, so how do we make the compiler's code base manageable?
- Compiler correctness: the binaries produced by the compiler should do what the input programs says they do, and should continue to do so despite the tremendous amount of change constantly going on.
- Integration: a number of other tools need to use the compiler in
various ways (e.g.
cargo,clippy,MIRI) that must be supported. - Compiler stability: the compiler should not crash or fail ungracefully on the stable channel.
- Rust stability: the compiler must respect Rust's stability guarantees by not breaking programs that previously compiled despite the many changes that are always going on to its implementation.
- Limitations of other tools:
rustcuses LLVM in its backend, and LLVM has some strengths we leverage and some aspects we need to work around.
So, as you continue your journey through the rest of the guide, keep these things in mind. They will often inform decisions that we make.
Intermediate representations
As with most compilers, rustc uses some intermediate representations (IRs) to
facilitate computations. In general, working directly with the source code is
extremely inconvenient and error-prone. Source code is designed to be human-friendly while at
the same time being unambiguous, but it's less convenient for doing something
like, say, type checking.
Instead most compilers, including rustc, build some sort of IR out of the
source code which is easier to analyze. rustc has a few IRs, each optimized
for different purposes:
- Token stream: the lexer produces a stream of tokens directly from the source code. This stream of tokens is easier for the parser to deal with than raw text.
- Abstract Syntax Tree (
AST): the abstract syntax tree is built from the stream of tokens produced by the lexer. It represents pretty much exactly what the user wrote. It helps to do some syntactic sanity checking (e.g. checking that a type is expected where the user wrote one). - High-level IR (HIR): This is a sort of desugared
AST. It's still close to what the user wrote syntactically, but it includes some implicit things such as some elided lifetimes, etc. This IR is amenable to type checking. - Typed
HIR(THIR) formerly High-level Abstract IR (HAIR): This is an intermediate betweenHIRand MIR. It is like theHIRbut it is fully typed and a bit more desugared (e.g. method calls and implicit dereferences are made fully explicit). As a result, it is easier to lower toMIRfromTHIRthan from HIR. - Middle-level IR (
MIR): This IR is basically a Control-Flow Graph (CFG). A CFG is a type of diagram that shows the basic blocks of a program and how control flow can go between them. Likewise,MIRalso has a bunch of basic blocks with simple typed statements inside them (e.g. assignment, simple computations, etc) and control flow edges to other basic blocks (e.g., calls, dropping values).MIRis used for borrow checking and other important dataflow-based checks, such as checking for uninitialized values. It is also used for a series of optimizations and for constant evaluation (viaMIRI). BecauseMIRis still generic, we can do a lot of analyses here more efficiently than after monomorphization. LLVM-IR: This is the standard form of all input to the LLVM compiler.LLVM-IRis a sort of typed assembly language with lots of annotations. It's a standard format that is used by all compilers that use LLVM (e.g. the clang C compiler also outputsLLVM-IR).LLVM-IRis designed to be easy for other compilers to emit and also rich enough for LLVM to run a bunch of optimizations on it.
One other thing to note is that many values in the compiler are interned. This is a performance and memory optimization in which we allocate the values in a special allocator called an arena. Then, we pass around references to the values allocated in the arena. This allows us to make sure that identical values (e.g. types in your program) are only allocated once and can be compared cheaply by comparing pointers. Many of the intermediate representations are interned.
Queries
The first big implementation choice is Rust's use of the query system in its compiler. The Rust compiler is not organized as a series of passes over the code which execute sequentially. The Rust compiler does this to make incremental compilation possible -- that is, if the user makes a change to their program and recompiles, we want to do as little redundant work as possible to output the new binary.
In rustc, all the major steps above are organized as a bunch of queries that
call each other. For example, there is a query to ask for the type of something
and another to ask for the optimized MIR of a function. These queries can call
each other and are all tracked through the query system. The results of the
queries are cached on disk so that the compiler can tell which queries' results
changed from the last compilation and only redo those. This is how incremental
compilation works.
In principle, for the query-field steps, we do each of the above for each item
individually. For example, we will take the HIR for a function and use queries
to ask for the LLVM-IR for that HIR. This drives the generation of optimized
MIR, which drives the borrow checker, which drives the generation of MIR, and
so on.
... except that this is very over-simplified. In fact, some queries are not
cached on disk, and some parts of the compiler have to run for all code anyway
for correctness even if the code is dead code (e.g. the borrow checker). For
example, currently the mir_borrowck query is first executed on all functions
of a crate. Then the codegen backend invokes the
collect_and_partition_mono_items query, which first recursively requests the
optimized_mir for all reachable functions, which in turn runs mir_borrowck
for that function and then creates codegen units. This kind of split will need
to remain to ensure that unreachable functions still have their errors emitted.
Moreover, the compiler wasn't originally built to use a query system; the query
system has been retrofitted into the compiler, so parts of it are not query-field
yet. Also, LLVM isn't our code, so that isn't querified either. The plan is to
eventually query-fy all of the steps listed in the previous section,
but as of November 2022, only the steps between HIR and
LLVM-IR are query-field. That is, lexing, parsing, name resolution, and macro
expansion are done all at once for the whole program.
One other thing to mention here is the all-important "typing context",
TyCtxt, which is a giant struct that is at the center of all things.
(Note that the name is mostly historic. This is not a "typing context" in the
sense of Γ or Δ from type theory. The name is retained because that's what
the name of the struct is in the source code.) All
queries are defined as methods on the TyCtxt type, and the in-memory query
cache is stored there too. In the code, there is usually a variable called
tcx which is a handle on the typing context. You will also see lifetimes with
the name 'tcx, which means that something is tied to the lifetime of the
TyCtxt (usually it is stored or interned there).
ty::Ty
Types are really important in Rust, and they form the core of a lot of compiler
analyses. The main type (in the compiler) that represents types (in the user's
program) is rustc_middle::ty::Ty. This is so important that we have a whole chapter
on ty::Ty, but for now, we just want to mention that it exists and is the way
rustc represents types!
Also note that the rustc_middle::ty module defines the TyCtxt struct we mentioned before.
Parallelism
Compiler performance is a problem that we would like to improve on
(and are always working on). One aspect of that is parallelizing
rustc itself.
Currently, there is only one part of rustc that is parallel by default: code generation.
However, the rest of the compiler is still not yet parallel. There have been
lots of efforts spent on this, but it is generally a hard problem. The current
approach is to turn RefCells into Mutexs -- that is, we
switch to thread-safe internal mutability. However, there are ongoing
challenges with lock contention, maintaining query-system invariants under
concurrency, and the complexity of the code base. One can try out the current
work by enabling parallel compilation in config.toml. It's still early days,
but there are already some promising performance improvements.
Bootstrapping
rustc itself is written in Rust. So how do we compile the compiler? We use an
older compiler to compile the newer compiler. This is called bootstrapping.
Bootstrapping has a lot of interesting implications. For example, it means that one of the major users of Rust is the Rust compiler, so we are constantly testing our own software ("eating our own dogfood").
For more details on bootstrapping, see the bootstrapping section of the guide.
References
- Command line parsing
- Guide: The Rustc Driver and Interface
- Driver definition:
rustc_driver - Main entry point:
rustc_session::config::build_session_options
- Lexical Analysis: Lex the user program to a stream of tokens
- Guide: Lexing and Parsing
- Lexer definition:
rustc_lexer - Main entry point:
rustc_lexer::cursor::Cursor::advance_token
- Parsing: Parse the stream of tokens to an Abstract Syntax Tree (AST)
- Guide: Lexing and Parsing
- Guide: Macro Expansion
- Guide: Name Resolution
- Parser definition:
rustc_parse - Main entry points:
ASTdefinition:rustc_ast- Feature gating: TODO
- Early linting: TODO
- The High Level Intermediate Representation (HIR)
- Guide: The HIR
- Guide: Identifiers in the HIR
- Guide: The
HIRMap - Guide: Lowering
ASTtoHIR - How to view
HIRrepresentation for your codecargo rustc -- -Z unpretty=hir-tree - Rustc
HIRdefinition:rustc_hir - Main entry point: TODO
- Late linting: TODO
- Type Inference
- Guide: Type Inference
- Guide: The ty Module: Representing Types (semantics)
- Main entry point (type inference):
InferCtxtBuilder::enter - Main entry point (type checking bodies): the
typeckquery- These two functions can't be decoupled.
- The Mid Level Intermediate Representation (MIR)
- Guide: The
MIR(Mid level IR) - Definition:
rustc_middle/src/mir - Definition of sources that manipulates the MIR:
rustc_mir_build,rustc_mir_dataflow,rustc_mir_transform
- Guide: The
- The Borrow Checker
- Guide: MIR Borrow Check
- Definition:
rustc_borrowck - Main entry point:
mir_borrowckquery
MIROptimizations- Guide: MIR Optimizations
- Definition:
rustc_mir_transform - Main entry point:
optimized_mirquery
- Code Generation
- Guide: Code Generation
- Generating Machine Code from
LLVM-IRwith LLVM - TODO: reference? - Main entry point:
rustc_codegen_ssa::base::codegen_crate- This monomorphizes and produces
LLVM-IRfor one codegen unit. It then starts a background thread to run LLVM, which must be joined later. - Monomorphization happens lazily via
FunctionCx::monomorphizeandrustc_codegen_ssa::base::codegen_instance
- This monomorphizes and produces
High-level overview of the compiler source
Now that we have seen what the compiler does,
let's take a look at the structure of the rust-lang/rust repository,
where the rustc source code lives.
You may find it helpful to read the "Overview of the compiler" chapter, which introduces how the compiler works, before this one.
Workspace structure
The rust-lang/rust repository consists of a single large cargo workspace
containing the compiler, the standard libraries (core, alloc, std,
proc_macro, etc), and rustdoc, along with the build system and a
bunch of tools and submodules for building a full Rust distribution.
The repository consists of three main directories:
-
compiler/contains the source code forrustc. It consists of many crates that together make up the compiler. -
library/contains the standard libraries (core,alloc,std,proc_macro,test), as well as the Rust runtime (backtrace,rtstartup,lang_start). -
tests/contains the compiler tests. -
src/contains the source code forrustdoc,clippy,cargo, the build system, language docs, etc.
Compiler
The compiler is implemented in the various compiler/ crates.
The compiler/ crates all have names starting with rustc_*. These are a
collection of around 50 interdependent crates ranging in size from tiny to
huge. There is also the rustc crate which is the actual binary (i.e. the
main function); it doesn't actually do anything besides calling the
rustc_driver crate, which drives the various parts of compilation in other
crates.
The dependency structure of these crates is complex, but roughly it is something like this:
rustc(the binary) callsrustc_driver::main.rustc_driverdepends on a lot of other crates, but the main one isrustc_interface.rustc_interfacedepends on most of the other compiler crates. It is a fairly generic interface for driving the whole compilation.- Most of the other
rustc_*crates depend onrustc_middle, which defines a lot of central data structures in the compiler.rustc_middleand most of the other crates depend on a handful of crates representing the early parts of the compiler (e.g. the parser), fundamental data structures (e.g.Span), or error reporting:rustc_data_structures,rustc_span,rustc_errors, etc.
- Most of the other
You can see the exact dependencies by reading the Cargo.toml for the various
crates, just like a normal Rust crate.
One final thing: src/llvm-project is a submodule for our fork of LLVM.
During bootstrapping, LLVM is built and the compiler/rustc_llvm crate
contains Rust wrappers around LLVM (which is written in C++), so that the
compiler can interface with it.
Most of this book is about the compiler, so we won't have any further explanation of these crates here.
Big picture
The dependency structure of the compiler is influenced by two main factors:
- Organization. The compiler is a huge codebase; it would be an impossibly large crate. In part, the dependency structure reflects the code structure of the compiler.
- Compile-time. By breaking the compiler into multiple crates, we can take better advantage of incremental/parallel compilation using cargo. In particular, we try to have as few dependencies between crates as possible so that we don't have to rebuild as many crates if you change one.
At the very bottom of the dependency tree are a handful of crates that are used
by the whole compiler (e.g. rustc_span). The very early parts of the
compilation process (e.g. parsing and the Abstract Syntax Tree (AST))
depend on only these.
After the AST is constructed and other early analysis is done, the
compiler's query system gets set up. The query system is set up in a
clever way using function pointers. This allows us to break dependencies
between crates, allowing more parallel compilation. The query system is defined
in rustc_middle, so nearly all subsequent parts of the compiler depend on
this crate. It is a really large crate, leading to long compile times. Some
efforts have been made to move stuff out of it with varying success. Another
side-effect is that sometimes related functionality gets scattered across
different crates. For example, linting functionality is found across earlier
parts of the crate, rustc_lint, rustc_middle, and other places.
Ideally there would be fewer, more cohesive crates, with incremental and parallel compilation making sure compile times stay reasonable. However, incremental and parallel compilation haven't gotten good enough for that yet, so breaking things into separate crates has been our solution so far.
At the top of the dependency tree is rustc_driver and rustc_interface
which is an unstable wrapper around the query system helping drive various
stages of compilation. Other consumers of the compiler may use this interface
in different ways (e.g. rustdoc or maybe eventually rust-analyzer). The
rustc_driver crate first parses command line arguments and then uses
rustc_interface to drive the compilation to completion.
rustdoc
The bulk of rustdoc is in librustdoc. However, the rustdoc binary
itself is src/tools/rustdoc, which does nothing except call rustdoc::main.
There is also JavaScript and CSS for the docs in src/tools/rustdoc-js
and src/tools/rustdoc-themes.
You can read more about rustdoc in this chapter.
Tests
The test suite for all of the above is in tests/. You can read more
about the test suite in this chapter.
The test harness is in src/tools/compiletest/.
Build System
There are a number of tools in the repository just for building the compiler,
standard library, rustdoc, etc, along with testing, building a full Rust
distribution, etc.
One of the primary tools is src/bootstrap/. You can read more about
bootstrapping in this chapter. The process may also use other tools
from src/tools/, such as tidy/ or compiletest/.
Standard library
This code is fairly similar to most other Rust crates except that it must be
built in a special way because it can use unstable (nightly) features.
The standard library is sometimes referred to as libstd or the "standard facade".
Other
There are a lot of other things in the rust-lang/rust repo that are related
to building a full Rust distribution. Most of the time you don't need to worry about them.
These include:
src/ci: The CI configuration. This actually quite extensive because we run a lot of tests on a lot of platforms.src/doc: Various documentation, including submodules for a few books.src/etc: Miscellaneous utilities.- And more...
Queries: demand-driven compilation
As described in the high-level overview of the compiler, the Rust compiler
is still (as of July 2021) transitioning from a
traditional "pass-based" setup to a "demand-driven" system. The compiler query
system is the key to rustc's demand-driven organization.
The idea is pretty simple. Instead of entirely independent passes
(parsing, type-checking, etc.), a set of function-like queries
compute information about the input source. For example,
there is a query called type_of that, given the DefId of
some item, will compute the type of that item and return it to you.
Query execution is memoized. The first time you invoke a query, it will go do the computation, but the next time, the result is returned from a hashtable. Moreover, query execution fits nicely into incremental computation; the idea is roughly that, when you invoke a query, the result may be returned to you by loading stored data from disk.1
Eventually, we want the entire compiler
control-flow to be query driven. There will effectively be one
top-level query (compile) that will run compilation on a crate; this
will in turn demand information about that crate, starting from the
end. For example:
- The
compilequery might demand to get a list of codegen-units (i.e. modules that need to be compiled by LLVM). - But computing the list of codegen-units would invoke some subquery that returns the list of all modules defined in the Rust source.
- That query in turn would invoke something asking for the HIR.
- This keeps going further and further back until we wind up doing the actual parsing.
Although this vision is not fully realized, large sections of the compiler (for example, generating MIR) currently work exactly like this.
The "Incremental Compilation in Detail chapter gives a more in-depth description of what queries are and how they work. If you intend to write a query of your own, this is a good read.
Invoking queries
Invoking a query is simple. The TyCtxt ("type context") struct offers a method
for each defined query. For example, to invoke the type_of
query, you would just do this:
let ty = tcx.type_of(some_def_id);
How the compiler executes a query
So you may be wondering what happens when you invoke a query
method. The answer is that, for each query, the compiler maintains a
cache – if your query has already been executed, then, the answer is
simple: we clone the return value out of the cache and return it
(therefore, you should try to ensure that the return types of queries
are cheaply cloneable; insert an Rc if necessary).
Providers
If, however, the query is not in the cache, then the compiler will try to find a suitable provider. A provider is a function that has been defined and linked into the compiler somewhere that contains the code to compute the result of the query.
Providers are defined per-crate. The compiler maintains,
internally, a table of providers for every crate, at least
conceptually. Right now, there are really two sets: the providers for
queries about the local crate (that is, the one being compiled)
and providers for queries about external crates (that is,
dependencies of the local crate). Note that what determines the crate
that a query is targeting is not the kind of query, but the key.
For example, when you invoke tcx.type_of(def_id), that could be a
local query or an external query, depending on what crate the def_id
is referring to (see the self::keys::Key trait for more
information on how that works).
Providers always have the same signature:
fn provider<'tcx>(
tcx: TyCtxt<'tcx>,
key: QUERY_KEY,
) -> QUERY_RESULT {
...
}
Providers take two arguments: the tcx and the query key.
They return the result of the query.
How providers are setup
When the tcx is created, it is given the providers by its creator using
the Providers struct. This struct is generated by
the macros here, but it is basically a big list of function pointers:
struct Providers {
type_of: for<'tcx> fn(TyCtxt<'tcx>, DefId) -> Ty<'tcx>,
...
}
At present, we have one copy of the struct for local crates, and one for external crates, though the plan is that we may eventually have one per crate.
These Providers structs are ultimately created and populated by
rustc_driver, but it does this by distributing the work
throughout the other rustc_* crates. This is done by invoking
various provide functions. These functions tend to look
something like this:
pub fn provide(providers: &mut Providers) {
*providers = Providers {
type_of,
..*providers
};
}
That is, they take an &mut Providers and mutate it in place. Usually
we use the formulation above just because it looks nice, but you could
as well do providers.type_of = type_of, which would be equivalent.
(Here, type_of would be a top-level function, defined as we saw
before.) So, if we want to add a provider for some other query,
let's call it fubar, into the crate above, we might modify the provide()
function like so:
pub fn provide(providers: &mut Providers) {
*providers = Providers {
type_of,
fubar,
..*providers
};
}
fn fubar<'tcx>(tcx: TyCtxt<'tcx>, key: DefId) -> Fubar<'tcx> { ... }
N.B. Most of the rustc_* crates only provide local
providers. Almost all extern providers wind up going through the
rustc_metadata crate, which loads the information
from the crate metadata. But in some cases there are crates that
provide queries for both local and external crates, in which case
they define both a provide and a provide_extern function, through
wasm_import_module_map, that rustc_driver can invoke.
Adding a new query
How do you add a new query? Defining a query takes place in two steps:
- Declare the query name, its arguments and description.
- Supply query providers where needed.
To declare the query name and arguments, you simply add an entry to
the big macro invocation in compiler/rustc_middle/src/query/mod.rs.
Then you need to add a documentation comment to it with some internal description.
Then, provide the desc attribute which contains a user-facing description of the query.
The desc attribute is shown to the user in query cycles.
This looks something like:
rustc_queries! {
/// Records the type of every item.
query type_of(key: DefId) -> Ty<'tcx> {
cache_on_disk_if { key.is_local() }
desc { |tcx| "computing the type of `{}`", tcx.def_path_str(key) }
}
...
}
A query definition has the following form:
query type_of(key: DefId) -> Ty<'tcx> { ... }
^^^^^ ^^^^^^^ ^^^^^ ^^^^^^^^ ^^^
| | | | |
| | | | query modifiers
| | | result type
| | query key type
| name of query
query keyword
Let's go over these elements one by one:
- Query keyword: indicates a start of a query definition.
- Name of query: the name of the query method
(
tcx.type_of(..)). Also used as the name of a struct (ty::queries::type_of) that will be generated to represent this query. - Query key type: the type of the argument to this query.
This type must implement the
ty::query::keys::Keytrait, which defines (for example) how to map it to a crate, and so forth. - Result type of query: the type produced by this query. This type
should (a) not use
RefCellor other interior mutability and (b) be cheaply cloneable. Interning or usingRcorArcis recommended for non-trivial data types.2 - Query modifiers: various flags and options that customize how the query is processed (mostly with respect to incremental compilation).
So, to add a query:
- Add an entry to
rustc_queries!using the format above. - Link the provider by modifying the appropriate
providemethod; or add a new one if needed and ensure thatrustc_driveris invoking it.
The one exception to those rules is the ty::steal::Steal type,
which is used to cheaply modify MIR in place. See the definition
of Steal for more details. New uses of Steal should not be
added without alerting @rust-lang/compiler.
External links
Related design ideas, and tracking issues:
- Design document: On-demand Rustc incremental design doc
- Tracking Issue: "Red/Green" dependency tracking in compiler
More discussion and issues:
The Query Evaluation Model in Detail
- What is a query?
- Caching/Memoization
- Input data
- An example execution trace of some queries
- Cycles
- "Steal" Queries
This chapter provides a deeper dive into the abstract model queries are built on. It does not go into implementation details but tries to explain the underlying logic. The examples here, therefore, have been stripped down and simplified and don't directly reflect the compilers internal APIs.
What is a query?
Abstractly we view the compiler's knowledge about a given crate as a "database" and queries are the way of asking the compiler questions about it, i.e. we "query" the compiler's "database" for facts.
However, there's something special to this compiler database: It starts out empty and is filled on-demand when queries are executed. Consequently, a query must know how to compute its result if the database does not contain it yet. For doing so, it can access other queries and certain input values that the database is pre-filled with on creation.
A query thus consists of the following things:
- A name that identifies the query
- A "key" that specifies what we want to look up
- A result type that specifies what kind of result it yields
- A "provider" which is a function that specifies how the result is to be computed if it isn't already present in the database.
As an example, the name of the type_of query is type_of, its query key is a
DefId identifying the item we want to know the type of, the result type is
Ty<'tcx>, and the provider is a function that, given the query key and access
to the rest of the database, can compute the type of the item identified by the
key.
So in some sense a query is just a function that maps the query key to the corresponding result. However, we have to apply some restrictions in order for this to be sound:
- The key and result must be immutable values.
- The provider function must be a pure function in the sense that for the same key it must always yield the same result.
- The only parameters a provider function takes are the key and a reference to the "query context" (which provides access to the rest of the "database").
The database is built up lazily by invoking queries. The query providers will invoke other queries, for which the result is either already cached or computed by calling another query provider. These query provider invocations conceptually form a directed acyclic graph (DAG) at the leaves of which are input values that are already known when the query context is created.
Caching/Memoization
Results of query invocations are "memoized" which means that the query context will cache the result in an internal table and, when the query is invoked with the same query key again, will return the result from the cache instead of running the provider again.
This caching is crucial for making the query engine efficient. Without memoization the system would still be sound (that is, it would yield the same results) but the same computations would be done over and over again.
Memoization is one of the main reasons why query providers have to be pure functions. If calling a provider function could yield different results for each invocation (because it accesses some global mutable state) then we could not memoize the result.
Input data
When the query context is created, it is still empty: No queries have been executed, no results are cached. But the context already provides access to "input" data, i.e. pieces of immutable data that were computed before the context was created and that queries can access to do their computations.
As of January 2021, this input data consists mainly of the HIR map, upstream crate metadata, and the command-line options the compiler was invoked with; but in the future inputs will just consist of command-line options and a list of source files -- the HIR map will itself be provided by a query which processes these source files.
Without inputs, queries would live in a void without anything to compute their result from (remember, query providers only have access to other queries and the context but not any other outside state or information).
For a query provider, input data and results of other queries look exactly the same: It just tells the context "give me the value of X". Because input data is immutable, the provider can rely on it being the same across different query invocations, just as is the case for query results.
An example execution trace of some queries
How does this DAG of query invocations come into existence? At some point the compiler driver will create the, as yet empty, query context. It will then, from outside of the query system, invoke the queries it needs to perform its task. This looks something like the following:
fn compile_crate() {
let cli_options = ...;
let hir_map = ...;
// Create the query context `tcx`
let tcx = TyCtxt::new(cli_options, hir_map);
// Do type checking by invoking the type check query
tcx.type_check_crate();
}
The type_check_crate query provider would look something like the following:
fn type_check_crate_provider(tcx, _key: ()) {
let list_of_hir_items = tcx.hir_map.list_of_items();
for item_def_id in list_of_hir_items {
tcx.type_check_item(item_def_id);
}
}
We see that the type_check_crate query accesses input data
(tcx.hir_map.list_of_items()) and invokes other queries
(type_check_item). The type_check_item
invocations will themselves access input data and/or invoke other queries,
so that in the end the DAG of query invocations will be built up backwards
from the node that was initially executed:
(2) (1)
list_of_all_hir_items <----------------------------- type_check_crate()
|
(5) (4) (3) |
Hir(foo) <--- type_of(foo) <--- type_check_item(foo) <-------+
| |
+-----------------+ |
| |
(7) v (6) (8) |
Hir(bar) <--- type_of(bar) <--- type_check_item(bar) <-------+
// (x) denotes invocation order
We also see that often a query result can be read from the cache:
type_of(bar) was computed for type_check_item(foo) so when
type_check_item(bar) needs it, it is already in the cache.
Query results stay cached in the query context as long as the context lives. So if the compiler driver invoked another query later on, the above graph would still exist and already executed queries would not have to be re-done.
Cycles
Earlier we stated that query invocations form a DAG. However, it would be easy to form a cyclic graph by, for example, having a query provider like the following:
fn cyclic_query_provider(tcx, key) -> u32 {
// Invoke the same query with the same key again
tcx.cyclic_query(key)
}
Since query providers are regular functions, this would behave much as expected: Evaluation would get stuck in an infinite recursion. A query like this would not be very useful either. However, sometimes certain kinds of invalid user input can result in queries being called in a cyclic way. The query engine includes a check for cyclic invocations of queries with the same input arguments. And, because cycles are an irrecoverable error, will abort execution with a "cycle error" message that tries to be human readable.
At some point the compiler had a notion of "cycle recovery", that is, one could "try" to execute a query and if it ended up causing a cycle, proceed in some other fashion. However, this was later removed because it is not entirely clear what the theoretical consequences of this are, especially regarding incremental compilation.
"Steal" Queries
Some queries have their result wrapped in a Steal<T> struct. These queries
behave exactly the same as regular with one exception: Their result is expected
to be "stolen" out of the cache at some point, meaning some other part of the
program is taking ownership of it and the result cannot be accessed anymore.
This stealing mechanism exists purely as a performance optimization because some result values are too costly to clone (e.g. the MIR of a function). It seems like result stealing would violate the condition that query results must be immutable (after all we are moving the result value out of the cache) but it is OK as long as the mutation is not observable. This is achieved by two things:
- Before a result is stolen, we make sure to eagerly run all queries that might ever need to read that result. This has to be done manually by calling those queries.
- Whenever a query tries to access a stolen result, we make an ICE (Internal Compiler Error) so that such a condition cannot go unnoticed.
This is not an ideal setup because of the manual intervention needed, so it should be used sparingly and only when it is well known which queries might access a given result. In practice, however, stealing has not turned out to be much of a maintenance burden.
To summarize: "Steal queries" break some of the rules in a controlled way. There are checks in place that make sure that nothing can go silently wrong.
Incremental compilation
The incremental compilation scheme is, in essence, a surprisingly simple extension to the overall query system. We'll start by describing a slightly simplified variant of the real thing – the "basic algorithm" – and then describe some possible improvements.
The basic algorithm
The basic algorithm is called the red-green algorithm1. The high-level idea is that, after each run of the compiler, we will save the results of all the queries that we do, as well as the query DAG. The query DAG is a DAG that indexes which queries executed which other queries. So, for example, there would be an edge from a query Q1 to another query Q2 if computing Q1 required computing Q2 (note that because queries cannot depend on themselves, this results in a DAG and not a general graph).
NOTE: You might think of a query as simply the definition of a query. A thing that you can invoke, a bit like a function, and which either returns a cached result or actually executes the code.
If that's the way you think about queries, it's good to know that in the following text, queries will be said to have colours. Keep in mind though, that here the word query also refers to a certain invocation of the query for a certain input. As you will read later, queries are fingerprinted based on their arguments. The result of a query might change when we give it one argument and be coloured red, while it stays the same for another argument and is thus green.
In short, the word query is here not just used to mean the definition of a query, but also for a specific instance of that query with given arguments.
On the next run of the compiler, then, we can sometimes reuse these query results to avoid re-executing a query. We do this by assigning every query a color:
- If a query is colored red, that means that its result during this compilation has changed from the previous compilation.
- If a query is colored green, that means that its result is the same as the previous compilation.
There are two key insights here:
- First, if all the inputs to query Q are colored green, then the query Q must result in the same value as last time and hence need not be re-executed (or else the compiler is not deterministic).
- Second, even if some inputs to a query changes, it may be that it
still produces the same result as the previous compilation. In
particular, the query may only use part of its input.
- Therefore, after executing a query, we always check whether it produced the same result as the previous time. If it did, we can still mark the query as green, and hence avoid re-executing dependent queries.
The try-mark-green algorithm
At the core of incremental compilation is an algorithm called "try-mark-green". It has the job of determining the color of a given query Q (which must not have yet been executed). In cases where Q has red inputs, determining Q's color may involve re-executing Q so that we can compare its output, but if all of Q's inputs are green, then we can conclude that Q must be green without re-executing it or inspecting its value at all. In the compiler, this allows us to avoid deserializing the result from disk when we don't need it, and in fact enables us to sometimes skip serializing the result as well (see the refinements section below).
Try-mark-green works as follows:
- First check if the query Q was executed during the previous compilation.
- If not, we can just re-execute the query as normal, and assign it the color of red.
- If yes, then load the 'dependent queries' of Q.
- If there is a saved result, then we load the
reads(Q)vector from the query DAG. The "reads" is the set of queries that Q executed during its execution.- For each query R in
reads(Q), we recursively demand the color of R using try-mark-green.- Note: it is important that we visit each node in
reads(Q)in same order as they occurred in the original compilation. See the section on the query DAG below. - If any of the nodes in
reads(Q)wind up colored red, then Q is dirty.- We re-execute Q and compare the hash of its result to the hash of the result from the previous compilation.
- If the hash has not changed, we can mark Q as green and return.
- Otherwise, all of the nodes in
reads(Q)must be green. In that case, we can color Q as green and return.
- Note: it is important that we visit each node in
- For each query R in
The query DAG
The query DAG code is stored in
compiler/rustc_middle/src/dep_graph. Construction of the DAG is done
by instrumenting the query execution.
One key point is that the query DAG also tracks ordering; that is, for each query Q, we not only track the queries that Q reads, we track the order in which they were read. This allows try-mark-green to walk those queries back in the same order. This is important because once a subquery comes back as red, we can no longer be sure that Q will continue along the same path as before. That is, imagine a query like this:
fn main_query(tcx) {
if tcx.subquery1() {
tcx.subquery2()
} else {
tcx.subquery3()
}
}
Now imagine that in the first compilation, main_query starts by
executing subquery1, and this returns true. In that case, the next
query main_query executes will be subquery2, and subquery3 will
not be executed at all.
But now imagine that in the next compilation, the input has
changed such that subquery1 returns false. In this case, subquery2
would never execute. If try-mark-green were to visit reads(main_query) out
of order, however, it might visit subquery2 before subquery1, and hence
execute it.
This can lead to ICEs and other problems in the compiler.
Improvements to the basic algorithm
In the description of the basic algorithm, we said that at the end of compilation we would save the results of all the queries that were performed. In practice, this can be quite wasteful – many of those results are very cheap to recompute, and serializing and deserializing them is not a particular win. In practice, what we would do is to save the hashes of all the subqueries that we performed. Then, in select cases, we also save the results.
This is why the incremental algorithm separates computing the color of a node, which often does not require its value, from computing the result of a node. Computing the result is done via a simple algorithm like so:
- Check if a saved result for Q is available. If so, compute the color of Q. If Q is green, deserialize and return the saved result.
- Otherwise, execute Q.
- We can then compare the hash of the result and color Q as green if it did not change.
Resources
The initial design document can be found here, which expands on the memoization details, provides more high-level overview and motivation for this system.
Footnotes
I have long wanted to rename it to the Salsa algorithm, but it never caught on. -@nikomatsakis
Incremental Compilation In Detail
- A Basic Algorithm For Incremental Query Evaluation
- The Problem With The Basic Algorithm: False Positives
- Improving Accuracy: The red-green Algorithm
- The Real World: How Persistence Makes Everything Complicated
- Incremental Compilation and the Compiler Backend
- Shortcomings of the Current System
The incremental compilation scheme is, in essence, a surprisingly simple extension to the overall query system. It relies on the fact that:
- queries are pure functions -- given the same inputs, a query will always yield the same result, and
- the query model structures compilation in an acyclic graph that makes dependencies between individual computations explicit.
This chapter will explain how we can use these properties for making things incremental and then goes on to discuss version implementation issues.
A Basic Algorithm For Incremental Query Evaluation
As explained in the query evaluation model primer, query invocations form a directed-acyclic graph. Here's the example from the previous chapter again:
list_of_all_hir_items <----------------------------- type_check_crate()
|
|
Hir(foo) <--- type_of(foo) <--- type_check_item(foo) <-------+
| |
+-----------------+ |
| |
v |
Hir(bar) <--- type_of(bar) <--- type_check_item(bar) <-------+
Since every access from one query to another has to go through the query context, we can record these accesses and thus actually build this dependency graph in memory. With dependency tracking enabled, when compilation is done, we know which queries were invoked (the nodes of the graph) and for each invocation, which other queries or input has gone into computing the query's result (the edges of the graph).
Now suppose we change the source code of our program so that
HIR of bar looks different than before. Our goal is to only recompute
those queries that are actually affected by the change while re-using
the cached results of all the other queries. Given the dependency graph we can
do exactly that. For a given query invocation, the graph tells us exactly
what data has gone into computing its results, we just have to follow the
edges until we reach something that has changed. If we don't encounter
anything that has changed, we know that the query still would evaluate to
the same result we already have in our cache.
Taking the type_of(foo) invocation from above as an example, we can check
whether the cached result is still valid by following the edges to its
inputs. The only edge leads to Hir(foo), an input that has not been affected
by the change. So we know that the cached result for type_of(foo) is still
valid.
The story is a bit different for type_check_item(foo): We again walk the
edges and already know that type_of(foo) is fine. Then we get to
type_of(bar) which we have not checked yet, so we walk the edges of
type_of(bar) and encounter Hir(bar) which has changed. Consequently
the result of type_of(bar) might yield a different result than what we
have in the cache and, transitively, the result of type_check_item(foo)
might have changed too. We thus re-run type_check_item(foo), which in
turn will re-run type_of(bar), which will yield an up-to-date result
because it reads the up-to-date version of Hir(bar). Also, we re-run
type_check_item(bar) because result of type_of(bar) might have changed.
The Problem With The Basic Algorithm: False Positives
If you read the previous paragraph carefully you'll notice that it says that
type_of(bar) might have changed because one of its inputs has changed.
There's also the possibility that it might still yield exactly the same
result even though its input has changed. Consider an example with a
simple query that just computes the sign of an integer:
IntValue(x) <---- sign_of(x) <--- some_other_query(x)
Let's say that IntValue(x) starts out as 1000 and then is set to 2000.
Even though IntValue(x) is different in the two cases, sign_of(x) yields
the result + in both cases.
If we follow the basic algorithm, however, some_other_query(x) would have to
(unnecessarily) be re-evaluated because it transitively depends on a changed
input. Change detection yields a "false positive" in this case because it has
to conservatively assume that some_other_query(x) might be affected by that
changed input.
Unfortunately it turns out that the actual queries in the compiler are full of examples like this and small changes to the input often potentially affect very large parts of the output binaries. As a consequence, we had to make the change detection system smarter and more accurate.
Improving Accuracy: The red-green Algorithm
The "false positives" problem can be solved by interleaving change detection and query re-evaluation. Instead of walking the graph all the way to the inputs when trying to find out if some cached result is still valid, we can check if a result has actually changed after we were forced to re-evaluate it.
We call this algorithm the red-green algorithm because nodes in the dependency graph are assigned the color green if we were able to prove that its cached result is still valid and the color red if the result has turned out to be different after re-evaluating it.
The meat of red-green change tracking is implemented in the try-mark-green algorithm, that, you've guessed it, tries to mark a given node as green:
fn try_mark_green(tcx, current_node) -> bool {
// Fetch the inputs to `current_node`, i.e. get the nodes that the direct
// edges from `node` lead to.
let dependencies = tcx.dep_graph.get_dependencies_of(current_node);
// Now check all the inputs for changes
for dependency in dependencies {
match tcx.dep_graph.get_node_color(dependency) {
Green => {
// This input has already been checked before and it has not
// changed; so we can go on to check the next one
}
Red => {
// We found an input that has changed. We cannot mark
// `current_node` as green without re-running the
// corresponding query.
return false
}
Unknown => {
// This is the first time we look at this node. Let's try
// to mark it green by calling try_mark_green() recursively.
if try_mark_green(tcx, dependency) {
// We successfully marked the input as green, on to the
// next.
} else {
// We could *not* mark the input as green. This means we
// don't know if its value has changed. In order to find
// out, we re-run the corresponding query now!
tcx.run_query_for(dependency);
// Fetch and check the node color again. Running the query
// has forced it to either red (if it yielded a different
// result than we have in the cache) or green (if it
// yielded the same result).
match tcx.dep_graph.get_node_color(dependency) {
Red => {
// The input turned out to be red, so we cannot
// mark `current_node` as green.
return false
}
Green => {
// Re-running the query paid off! The result is the
// same as before, so this particular input does
// not invalidate `current_node`.
}
Unknown => {
// There is no way a node has no color after
// re-running the query.
panic!("unreachable")
}
}
}
}
}
}
// If we have gotten through the entire loop, it means that all inputs
// have turned out to be green. If all inputs are unchanged, it means
// that the query result corresponding to `current_node` cannot have
// changed either.
tcx.dep_graph.mark_green(current_node);
true
}
NOTE: The actual implementation can be found in
compiler/rustc_query_system/src/dep_graph/graph.rs
By using red-green marking we can avoid the devastating cumulative effect of
having false positives during change detection. Whenever a query is executed
in incremental mode, we first check if its already green. If not, we run
try_mark_green() on it. If it still isn't green after that, then we actually
invoke the query provider to re-compute the result. Re-computing the query might
then itself involve recursively invoking more queries, which can mean we come back
to the try_mark_green() algorithm for the dependencies recursively.
The Real World: How Persistence Makes Everything Complicated
The sections above described the underlying algorithm for incremental compilation but because the compiler process exits after being finished and takes the query context with its result cache with it into oblivion, we have to persist data to disk, so the next compilation session can make use of it. This comes with a whole new set of implementation challenges:
- The query result cache is stored to disk, so they are not readily available for change comparison.
- A subsequent compilation session will start off with new version of the code
that has arbitrary changes applied to it. All kinds of IDs and indices that
are generated from a global, sequential counter (e.g.
NodeId,DefId, etc) might have shifted, making the persisted results on disk not immediately usable anymore because the same numeric IDs and indices might refer to completely new things in the new compilation session. - Persisting things to disk comes at a cost, so not every tiny piece of information should be actually cached in between compilation sessions. Fixed-sized, plain-old-data is preferred to complex things that need to run through an expensive (de-)serialization step.
The following sections describe how the compiler solves these issues.
A Question Of Stability: Bridging The Gap Between Compilation Sessions
As noted before, various IDs (like DefId) are generated by the compiler in a
way that depends on the contents of the source code being compiled. ID assignment
is usually deterministic, that is, if the exact same code is compiled twice,
the same things will end up with the same IDs. However, if something
changes, e.g. a function is added in the middle of a file, there is no
guarantee that anything will have the same ID as it had before.
As a consequence we cannot represent the data in our on-disk cache the same
way it is represented in memory. For example, if we just stored a piece
of type information like TyKind::FnDef(DefId, &'tcx Substs<'tcx>) (as we do
in memory) and then the contained DefId points to a different function in
a new compilation session we'd be in trouble.
The solution to this problem is to find "stable" forms for IDs which remain
valid in between compilation sessions. For the most important case, DefIds,
these are the so-called DefPaths. Each DefId has a
corresponding DefPath but in place of a numeric ID, a DefPath is based on
the path to the identified item, e.g. std::collections::HashMap. The
advantage of an ID like this is that it is not affected by unrelated changes.
For example, one can add a new function to std::collections but
std::collections::HashMap would still be std::collections::HashMap. A
DefPath is "stable" across changes made to the source code while a DefId
isn't.
There is also the DefPathHash which is just a 128-bit hash value of the
DefPath. The two contain the same information and we mostly use the
DefPathHash because it simpler to handle, being Copy and self-contained.
This principle of stable identifiers is used to make the data in the on-disk
cache resilient to source code changes. Instead of storing a DefId, we store
the DefPathHash and when we deserialize something from the cache, we map the
DefPathHash to the corresponding DefId in the current compilation session
(which is just a simple hash table lookup).
The HirId, used for identifying HIR components that don't have their own
DefId, is another such stable ID. It is (conceptually) a pair of a DefPath
and a LocalId, where the LocalId identifies something (e.g. a hir::Expr)
locally within its "owner" (e.g. a hir::Item). If the owner is moved around,
the LocalIds within it are still the same.
Checking Query Results For Changes: HashStable And Fingerprints
In order to do red-green-marking we often need to check if the result of a query has changed compared to the result it had during the previous compilation session. There are two performance problems with this though:
- We'd like to avoid having to load the previous result from disk just for doing the comparison. We already computed the new result and will use that. Also loading a result from disk will "pollute" the interners with data that is unlikely to ever be used.
- We don't want to store each and every result in the on-disk cache. For example, it would be wasted effort to persist things to disk that are already available in upstream crates.
The compiler avoids these problems by using so-called Fingerprints. Each time
a new query result is computed, the query engine will compute a 128 bit hash
value of the result. We call this hash value "the Fingerprint of the query
result". The hashing is (and has to be) done "in a stable way". This means
that whenever something is hashed that might change in between compilation
sessions (e.g. a DefId), we instead hash its stable equivalent
(e.g. the corresponding DefPath). That's what the whole HashStable
infrastructure is for. This way Fingerprints computed in two
different compilation sessions are still comparable.
The next step is to store these fingerprints along with the dependency graph. This is cheap since fingerprints are just bytes to be copied. It's also cheap to load the entire set of fingerprints together with the dependency graph.
Now, when red-green-marking reaches the point where it needs to check if a result has changed, it can just compare the (already loaded) previous fingerprint to the fingerprint of the new result.
This approach works rather well but it's not without flaws:
-
There is a small possibility of hash collisions. That is, two different results could have the same fingerprint and the system would erroneously assume that the result hasn't changed, leading to a missed update.
We mitigate this risk by using a high-quality hash function and a 128 bit wide hash value. Due to these measures the practical risk of a hash collision is negligible.
-
Computing fingerprints is quite costly. It is the main reason why incremental compilation can be slower than non-incremental compilation. We are forced to use a good and thus expensive hash function, and we have to map things to their stable equivalents while doing the hashing.
A Tale Of Two DepGraphs: The Old And The New
The initial description of dependency tracking glosses over a few details that quickly become a head scratcher when actually trying to implement things. In particular it's easy to overlook that we are actually dealing with two dependency graphs: The one we built during the previous compilation session and the one that we are building for the current compilation session.
When a compilation session starts, the compiler loads the previous dependency
graph into memory as an immutable piece of data. Then, when a query is invoked,
it will first try to mark the corresponding node in the graph as green. This
means really that we are trying to mark the node in the previous dep-graph
as green that corresponds to the query key in the current session. How do we
do this mapping between current query key and previous DepNode? The answer
is again Fingerprints: Nodes in the dependency graph are identified by a
fingerprint of the query key. Since fingerprints are stable across compilation
sessions, computing one in the current session allows us to find a node
in the dependency graph from the previous session. If we don't find a node with
the given fingerprint, it means that the query key refers to something that
did not yet exist in the previous session.
So, having found the dep-node in the previous dependency graph, we can look up its dependencies (i.e. also dep-nodes in the previous graph) and continue with the rest of the try-mark-green algorithm. The next interesting thing happens when we successfully marked the node as green. At that point we copy the node and the edges to its dependencies from the old graph into the new graph. We have to do this because the new dep-graph cannot acquire the node and edges via the regular dependency tracking. The tracking system can only record edges while actually running a query -- but running the query, although we have the result already cached, is exactly what we want to avoid.
Once the compilation session has finished, all the unchanged parts have been copied over from the old into the new dependency graph, while the changed parts have been added to the new graph by the tracking system. At this point, the new graph is serialized out to disk, alongside the query result cache, and can act as the previous dep-graph in a subsequent compilation session.
Didn't You Forget Something?: Cache Promotion
The system described so far has a somewhat subtle property: If all inputs of a dep-node are green then the dep-node itself can be marked as green without computing or loading the corresponding query result. Applying this property transitively often leads to the situation that some intermediate results are never actually loaded from disk, as in the following example:
input(A) <-- intermediate_query(B) <-- leaf_query(C)
The compiler might need the value of leaf_query(C) in order to generate some
output artifact. If it can mark leaf_query(C) as green, it will load the
result from the on-disk cache. The result of intermediate_query(B) is never
loaded though. As a consequence, when the compiler persists the new result
cache by writing all in-memory query results to disk, intermediate_query(B)
will not be in memory and thus will be missing from the new result cache.
If there subsequently is another compilation session that actually needs the
result of intermediate_query(B) it will have to be re-computed even though we
had a perfectly valid result for it in the cache just before.
In order to prevent this from happening, the compiler does something called "cache promotion": Before emitting the new result cache it will walk all green dep-nodes and make sure that their query result is loaded into memory. That way the result cache doesn't unnecessarily shrink again.
Incremental Compilation and the Compiler Backend
The compiler backend, the part involving LLVM, is using the query system but it is not implemented in terms of queries itself. As a consequence it does not automatically partake in dependency tracking. However, the manual integration with the tracking system is pretty straight-forward. The compiler simply tracks what queries get invoked when generating the initial LLVM version of each codegen unit, which results in a dep-node for each of them. In subsequent compilation sessions it then tries to mark the dep-node for a CGU as green. If it succeeds it knows that the corresponding object and bitcode files on disk are still valid. If it doesn't succeed, the entire codegen unit has to be recompiled.
This is the same approach that is used for regular queries. The main differences are:
-
that we cannot easily compute a fingerprint for LLVM modules (because they are opaque C++ objects),
-
that the logic for dealing with cached values is rather different from regular queries because here we have bitcode and object files instead of serialized Rust values in the common result cache file, and
-
the operations around LLVM are so expensive in terms of computation time and memory consumption that we need to have tight control over what is executed when and what stays in memory for how long.
The query system could probably be extended with general purpose mechanisms to deal with all of the above but so far that seemed like more trouble than it would save.
Query Modifiers
The query system allows for applying modifiers to queries. These modifiers affect certain aspects of how the system treats the query with respect to incremental compilation:
-
eval_always- A query with theeval_alwaysattribute is re-executed unconditionally during incremental compilation. I.e. the system will not even try to mark the query's dep-node as green. This attribute has two use cases:-
eval_alwaysqueries can read inputs (from files, global state, etc). They can also produce side effects like writing to files and changing global state. -
Some queries are very likely to be re-evaluated because their result depends on the entire source code. In this case
eval_alwayscan be used as an optimization because the system can skip recording dependencies in the first place.
-
-
no_hash- Applyingno_hashto a query tells the system to not compute the fingerprint of the query's result. This has two consequences:-
Not computing the fingerprint can save quite a bit of time because fingerprinting is expensive, especially for large, complex values.
-
Without the fingerprint, the system has to unconditionally assume that the result of the query has changed. As a consequence anything depending on a
no_hashquery will always be re-executed.
Using
no_hashfor a query can make sense in two circumstances:-
If the result of the query is very likely to change whenever one of its inputs changes, e.g. a function like
|a, b, c| -> (a * b * c). In such a case recomputing the query will always yield a red node if one of the inputs is red so we can spare us the trouble and default to red immediately. A counter example would be a function like|a| -> (a == 42)where the result does not change for most changes ofa. -
If the result of a query is a big, monolithic collection (e.g.
index_hir) and there are "projection queries" reading from that collection (e.g.hir_owner). In such a case the big collection will likely fulfill the condition above (any changed input means recomputing the whole collection) and the results of the projection queries will be hashed anyway. If we also hashed the collection query it would mean that we effectively hash the same data twice: once when hashing the collection and another time when hashing all the projection query results.no_hashallows us to avoid that redundancy and the projection queries act as a "firewall", shielding their dependents from the unconditionally redno_hashnode.
-
-
cache_on_disk_if- This attribute is what determines which query results are persisted in the incremental compilation query result cache. The attribute takes an expression that allows per query invocation decisions. For example, it makes no sense to store values from upstream crates in the cache because they are already available in the upstream crate's metadata. -
anon- This attribute makes the system use "anonymous" dep-nodes for the given query. An anonymous dep-node is not identified by the corresponding query key, instead its ID is computed from the IDs of its dependencies. This allows the red-green system to do its change detection even if there is no query key available for a given dep-node -- something which is needed for handling trait selection because it is not based on queries.
The Projection Query Pattern
It's interesting to note that eval_always and no_hash can be used together
in the so-called "projection query" pattern. It is often the case that there is
one query that depends on the entirety of the compiler's input (e.g. the indexed HIR)
and another query that projects individual values out of this monolithic value
(e.g. a HIR item with a certain DefId). These projection queries allow for
building change propagation "firewalls" because even if the result of the
monolithic query changes (which it is very likely to do) the small projections
can still mostly be marked as green.
+------------+
| | +---------------+ +--------+
| | <---------| projection(x) | <---------| foo(a) |
| | +---------------+ +--------+
| |
| monolithic | +---------------+ +--------+
| query | <---------| projection(y) | <---------| bar(b) |
| | +---------------+ +--------+
| |
| | +---------------+ +--------+
| | <---------| projection(z) | <---------| baz(c) |
| | +---------------+ +--------+
+------------+
Let's assume that the result monolithic_query changes so that also the result
of projection(x) has changed, i.e. both their dep-nodes are being marked as
red. As a consequence foo(a) needs to be re-executed; but bar(b) and
baz(c) can be marked as green. However, if foo, bar, and baz would have
directly depended on monolithic_query then all of them would have had to be
re-evaluated.
This pattern works even without eval_always and no_hash but the two
modifiers can be used to avoid unnecessary overhead. If the monolithic query
is likely to change at any minor modification of the compiler's input it makes
sense to mark it as eval_always, thus getting rid of its dependency tracking
cost. And it always makes sense to mark the monolithic query as no_hash
because we have the projections to take care of keeping things green as much
as possible.
Shortcomings of the Current System
There are many things that still can be improved.
Incrementality of on-disk data structures
The current system is not able to update on-disk caches and the dependency graph in-place. Instead it has to rewrite each file entirely in each compilation session. The overhead of doing so is a few percent of total compilation time.
Unnecessary data dependencies
Data structures used as query results could be factored in a way that removes edges from the dependency graph. Especially "span" information is very volatile, so including it in query result will increase the chance that the result won't be reusable. See https://github.com/rust-lang/rust/issues/47389 for more information.
Debugging and Testing Dependencies
Testing the dependency graph
There are various ways to write tests against the dependency graph. The
simplest mechanisms are the #[rustc_if_this_changed] and
#[rustc_then_this_would_need] annotations. These are used in ui tests to test
whether the expected set of paths exist in the dependency graph.
As an example, see tests/ui/dep-graph/dep-graph-caller-callee.rs, or the
tests below.
#[rustc_if_this_changed]
fn foo() { }
#[rustc_then_this_would_need(TypeckTables)] //~ ERROR OK
fn bar() { foo(); }
This should be read as
If this (
foo) is changed, then this (i.e.bar)'s TypeckTables would need to be changed.
Technically, what occurs is that the test is expected to emit the string "OK" on stderr, associated to this line.
You could also add the lines
#[rustc_then_this_would_need(TypeckTables)] //~ ERROR no path
fn baz() { }
Whose meaning is
If
foois changed, thenbaz's TypeckTables does not need to be changed. The macro must emit an error, and the error message must contains "no path".
Recall that the //~ ERROR OK is a comment from the point of view of the Rust
code we test, but is meaningful from the point of view of the test itself.
Debugging the dependency graph
Dumping the graph
The compiler is also capable of dumping the dependency graph for your
debugging pleasure. To do so, pass the -Z dump-dep-graph flag. The
graph will be dumped to dep_graph.{txt,dot} in the current
directory. You can override the filename with the RUST_DEP_GRAPH
environment variable.
Frequently, though, the full dep graph is quite overwhelming and not particularly helpful. Therefore, the compiler also allows you to filter the graph. You can filter in three ways:
- All edges originating in a particular set of nodes (usually a single node).
- All edges reaching a particular set of nodes.
- All edges that lie between given start and end nodes.
To filter, use the RUST_DEP_GRAPH_FILTER environment variable, which should
look like one of the following:
source_filter // nodes originating from source_filter
-> target_filter // nodes that can reach target_filter
source_filter -> target_filter // nodes in between source_filter and target_filter
source_filter and target_filter are a &-separated list of strings.
A node is considered to match a filter if all of those strings appear in its
label. So, for example:
RUST_DEP_GRAPH_FILTER='-> TypeckTables'
would select the predecessors of all TypeckTables nodes. Usually though you
want the TypeckTables node for some particular fn, so you might write:
RUST_DEP_GRAPH_FILTER='-> TypeckTables & bar'
This will select only the predecessors of TypeckTables nodes for functions
with bar in their name.
Perhaps you are finding that when you change foo you need to re-type-check
bar, but you don't think you should have to. In that case, you might do:
RUST_DEP_GRAPH_FILTER='Hir & foo -> TypeckTables & bar'
This will dump out all the nodes that lead from Hir(foo) to
TypeckTables(bar), from which you can (hopefully) see the source
of the erroneous edge.
Tracking down incorrect edges
Sometimes, after you dump the dependency graph, you will find some
path that should not exist, but you will not be quite sure how it came
to be. When the compiler is built with debug assertions, it can
help you track that down. Simply set the RUST_FORBID_DEP_GRAPH_EDGE
environment variable to a filter. Every edge created in the dep-graph
will be tested against that filter – if it matches, a bug! is
reported, so you can easily see the backtrace (RUST_BACKTRACE=1).
The syntax for these filters is the same as described in the previous section. However, note that this filter is applied to every edge and doesn't handle longer paths in the graph, unlike the previous section.
Example:
You find that there is a path from the Hir of foo to the type
check of bar and you don't think there should be. You dump the
dep-graph as described in the previous section and open dep-graph.txt
to see something like:
Hir(foo) -> Collect(bar)
Collect(bar) -> TypeckTables(bar)
That first edge looks suspicious to you. So you set
RUST_FORBID_DEP_GRAPH_EDGE to Hir&foo -> Collect&bar, re-run, and
then observe the backtrace. Voila, bug fixed!
How Salsa works
This chapter is based on the explanation given by Niko Matsakis in this video about Salsa. To find out more you may want to watch Salsa In More Depth, also by Niko Matsakis.
As of November 2022, although Salsa is inspired by (among other things) rustc's query system, it is not used directly in rustc. It is used in chalk, an implementation of Rust's trait system, and extensively in
rust-analyzer, the official implementation of the language server protocol for Rust, but there are no medium or long-term concrete plans to integrate it into the compiler.
What is Salsa?
Salsa is a library for incremental recomputation. This means it allows reusing computations that were already done in the past to increase the efficiency of future computations.
The objectives of Salsa are:
- Provide that functionality in an automatic way, so reusing old computations is done automatically by the library.
- Doing so in a "sound", or "correct", way, therefore leading to the same results as if it had been done from scratch.
Salsa's actual model is much richer, allowing many kinds of inputs and many different outputs.
For example, integrating Salsa with an IDE could mean that
the inputs could be manifests (Cargo.toml, rust-toolchain.toml), entire
source files (foo.rs), snippets and so on. The outputs of such an integration
could range from a binary executable, to lints, types (for example, if a user
selects a certain variable and wishes to see its type), completions, etc.
How does it work?
The first thing that Salsa has to do is identify the "base inputs" that are not something computed but given as input.
Then Salsa has to also identify intermediate, "derived" values, which are something that the library produces, but, for each derived value there's a "pure" function that computes the derived value.
For example, there might be a function ast(x: Path) -> AST. The produced
Abstract Syntax Tree (AST) isn't a final value, it's an intermediate value
that the library would use for the computation.
This means that when you try to compute with the library, Salsa is going to compute various derived values, and eventually read the input and produce the result for the asked computation.
In the course of computing, Salsa tracks which inputs were accessed and which values are derived. This information is used to determine what's going to happen when the inputs change: are the derived values still valid?
This doesn't necessarily mean that each computation downstream from the input is going to be checked, which could be costly. Salsa only needs to check each downstream computation until it finds one that isn't changed. At that point, it won't check other derived computations since they wouldn't need to change.
It's helpful to think about this as a graph with nodes. Each derived value has a dependency on other values, which could themselves be either base or derived. Base values don't have a dependency.
I <- A <- C ...
|
J <- B <--+
When an input I changes, the derived value A could change. The derived
value B, which does not depend on I, A, or any value derived from A or
I, is not subject to change. Therefore, Salsa can reuse the computation done
for B in the past, without having to compute it again.
The computation could also terminate early. Keeping the same graph as before,
say that input I has changed in some way (and input J hasn't), but when
computing A again, it's found that A hasn't changed from the previous
computation. This leads to an "early termination", because there's no need to
check if C needs to change, since both C direct inputs, A and B,
haven't changed.
Key Salsa concepts
Query
A query is some value that Salsa can access in the course of computation. Each
query can have a number of keys (from 0 to many), and all queries have a
result, akin to functions. 0-key queries are called "input" queries.
Database
The database is basically the context for the entire computation, it's meant to store Salsa's internal state, all intermediate values for each query, and anything else that the computation might need. The database must know all the queries the library is going to do before it can be built, but they don't need to be specified in the same place.
After the database is formed, it can be accessed with queries that are very
similar to functions. Since each query's result is stored in the database, when
a query is invoked N-times, it will return N-cloned results, without having
to recompute the query (unless the input has changed in such a way that it
warrants recomputation).
For each input query (0-key), a "set" method is generated, allowing the user to
change the output of such query, and trigger previous memoized values to be
potentially invalidated.
Query Groups
A query group is a set of queries which have been defined together as a unit. The database is formed by combining query groups. Query groups are akin to "Salsa modules".
A set of queries in a query group are just a set of methods in a trait.
To create a query group a trait annotated with a specific attribute
(#[salsa::query_group(...)]) has to be created.
An argument must also be provided to said attribute as it will be used by Salsa
to create a struct to be used later when the database is created.
Example input query group:
/// This attribute will process this tree, produce this tree as output, and produce
/// a bunch of intermediate stuff that Salsa also uses. One of these things is a
/// "StorageStruct", whose name we have specified in the attribute.
///
/// This query group is a bunch of **input** queries, that do not rely on any
/// derived input.
#[salsa::query_group(InputsStorage)]
pub trait Inputs {
/// This attribute (`#[salsa::input]`) indicates that this query is a base
/// input, therefore `set_manifest` is going to be auto-generated
#[salsa::input]
fn manifest(&self) -> Manifest;
#[salsa::input]
fn source_text(&self, name: String) -> String;
}
To create a derived query group, one must specify which other query groups this one depends on by specifying them as supertraits, as seen in the following example:
/// This query group is going to contain queries that depend on derived values.
/// A query group can access another query group's queries by specifying the
/// dependency as a supertrait. Query groups can be stacked as much as needed using
/// that pattern.
#[salsa::query_group(ParserStorage)]
pub trait Parser: Inputs {
/// This query `ast` is not an input query, it's a derived query this means
/// that a definition is necessary.
fn ast(&self, name: String) -> String;
}
When creating a derived query the implementation of said query must be defined
outside the trait. The definition must take a database parameter as an impl Trait (or dyn Trait), where trait is the query group that the definition
belongs to, in addition to the other keys.
/// This is going to be the definition of the `ast` query in the `Parser` trait.
/// So, when the query `ast` is invoked, and it needs to be recomputed, Salsa is
/// going to call this function and it's going to give it the database as `impl
/// Parser`. The function doesn't need to be aware of all the queries of all the
/// query groups
fn ast(db: &impl Parser, name: String) -> String {
//! Note, `impl Parser` is used here but `dyn Parser` works just as well
/* code */
///By passing an `impl Parser`, this is allowed
let source_text = db.input_file(name);
/* do the actual parsing */
return ast;
}
Eventually, after all the query groups have been defined, the database can be
created by declaring a struct.
To specify which query groups are going to be part of the database an attribute
(#[salsa::database(...)]) must be added. The argument of said attribute is a
list of identifiers, specifying the query groups storages.
///This attribute specifies which query groups are going to be in the database
#[salsa::database(InputsStorage, ParserStorage)]
#[derive(Default)] //optional!
struct MyDatabase {
///You also need this one field
runtime : salsa::Runtime<MyDatabase>,
}
///And this trait has to be implemented
impl salsa::Database for MyDatabase {
fn salsa_runtime(&self) -> &salsa::Runtime<MyDatabase> {
&self.runtime
}
}
Example usage:
fn main() {
let db = MyDatabase::default();
db.set_manifest(...);
db.set_source_text(...);
loop {
db.ast(...); //will reuse results
db.set_source_text(...);
}
}
Memory Management in Rustc
Generally rustc tries to be pretty careful how it manages memory. The compiler allocates a lot of data structures throughout compilation, and if we are not careful, it will take a lot of time and space to do so.
One of the main way the compiler manages this is using arenas and interning.
Arenas and Interning
Since A LOT of data structures are created during compilation, for performance
reasons, we allocate them from a global memory pool.
Each are allocated once from a long-lived arena.
This is called arena allocation.
This system reduces allocations/deallocations of memory.
It also allows for easy comparison of types (more on types here) for equality:
for each interned type X, we implemented PartialEq for X,
so we can just compare pointers.
The CtxtInterners type contains a bunch of maps of interned types and the arena itself.
Example: ty::TyKind
Taking the example of ty::TyKind which represents a type in the compiler (you
can read more here). Each time we want to construct a type, the
compiler doesn’t naively allocate from the buffer. Instead, we check if that
type was already constructed. If it was, we just get the same pointer we had
before, otherwise we make a fresh pointer. With this schema if we want to know
if two types are the same, all we need to do is compare the pointers which is
efficient. ty::TyKind should never be constructed on the stack, and it would be unusable
if done so.
You always allocate them from this arena and you always intern them so they are
unique.
At the beginning of the compilation we make a buffer and each time we need to allocate a type we use
some of this memory buffer. If we run out of space we get another one. The lifetime of that buffer
is 'tcx. Our types are tied to that lifetime, so when compilation finishes all the memory related
to that buffer is freed and our 'tcx references would be invalid.
In addition to types, there are a number of other arena-allocated data structures that you can allocate, and which are found in this module. Here are a few examples:
GenericArgs, allocated withmk_args– this will intern a slice of types, often used to specify the values to be substituted for generics args (e.g.HashMap<i32, u32>would be represented as a slice&'tcx [tcx.types.i32, tcx.types.u32]).TraitRef, typically passed by value – a trait reference consists of a reference to a trait along with its various type parameters (includingSelf), likei32: Display(here, the def-id would reference theDisplaytrait, and the args would containi32). Note thatdef-idis defined and discussed in depth in theAdtDef and DefIdsection.Predicatedefines something the trait system has to prove (see traits module).
The tcx and how it uses lifetimes
The typing context (tcx) is the central data structure in the compiler. It is the context that
you use to perform all manner of queries. The struct TyCtxt defines a reference to this shared
context:
tcx: TyCtxt<'tcx>
// ----
// |
// arena lifetime
As you can see, the TyCtxt type takes a lifetime parameter. When you see a reference with a
lifetime like 'tcx, you know that it refers to arena-allocated data (or data that lives as long as
the arenas, anyhow).
A Note On Lifetimes
The Rust compiler is a fairly large program containing lots of big data
structures (e.g. the Abstract Syntax Tree (AST), High-Level Intermediate
Representation (HIR), and the type system) and as such, arenas and
references are heavily relied upon to minimize unnecessary memory use. This
manifests itself in the way people can plug into the compiler (i.e. the
driver), preferring a "push"-style API (callbacks) instead
of the more Rust-ic "pull" style (think the Iterator trait).
Thread-local storage and interning are used a lot through the compiler to reduce
duplication while also preventing a lot of the ergonomic issues due to many
pervasive lifetimes. The rustc_middle::ty::tls module is used to access these
thread-locals, although you should rarely need to touch it.
Serialization in Rustc
rustc has to serialize and deserialize various data during compilation. Specifically:
- "Crate metadata", consisting mainly of query outputs, are serialized
from a binary format into
rlibandrmetafiles that are output when compiling a library crate. Theserlibandrmetafiles are then deserialized by the crates which depend on that library. - Certain query outputs are serialized in a binary format to persist incremental compilation results.
CrateInfois serialized toJSONwhen the-Z no-linkflag is used, and deserialized fromJSONwhen the-Z link-onlyflag is used.
The Encodable and Decodable traits
The rustc_serialize crate defines two traits for types which can be serialized:
pub trait Encodable<S: Encoder> {
fn encode(&self, s: &mut S) -> Result<(), S::Error>;
}
pub trait Decodable<D: Decoder>: Sized {
fn decode(d: &mut D) -> Result<Self, D::Error>;
}
It also defines implementations of these for various common standard library
primitive types such as integer
types, floating point types, bool, char, str, etc.
For types that are constructed from those types, Encodable and Decodable
are usually implemented by derives. These generate implementations that
forward deserialization to the fields of the struct or enum. For a
struct those impls look something like this:
#![feature(rustc_private)]
extern crate rustc_serialize;
use rustc_serialize::{Decodable, Decoder, Encodable, Encoder};
struct MyStruct {
int: u32,
float: f32,
}
impl<E: Encoder> Encodable<E> for MyStruct {
fn encode(&self, s: &mut E) -> Result<(), E::Error> {
s.emit_struct("MyStruct", 2, |s| {
s.emit_struct_field("int", 0, |s| self.int.encode(s))?;
s.emit_struct_field("float", 1, |s| self.float.encode(s))
})
}
}
impl<D: Decoder> Decodable<D> for MyStruct {
fn decode(s: &mut D) -> Result<MyStruct, D::Error> {
s.read_struct("MyStruct", 2, |d| {
let int = d.read_struct_field("int", 0, Decodable::decode)?;
let float = d.read_struct_field("float", 1, Decodable::decode)?;
Ok(MyStruct { int, float })
})
}
}
Encoding and Decoding arena allocated types
rustc has a lot of arena allocated types.
Deserializing these types isn't possible without access to the arena that they need to be allocated on.
The TyDecoder and TyEncoder traits are supertraits of Decoder and Encoder that allow access to a TyCtxt.
Types which contain arena allocated types can then bound the type parameter of their
Encodable and Decodable implementations with these traits.
For example
impl<'tcx, D: TyDecoder<'tcx>> Decodable<D> for MyStruct<'tcx> {
/* ... */
}
The TyEncodable and TyDecodable derive macros will expand to such
an implementation.
Decoding the actual arena allocated type is harder, because some of the
implementations can't be written due to the orphan rules. To work around this,
the RefDecodable trait is defined in rustc_middle. This can then be
implemented for any type. The TyDecodable macro will call RefDecodable to
decode references, but various generic code needs types to actually be
Decodable with a specific decoder.
For interned types instead of manually implementing RefDecodable, using a new
type wrapper, like ty::Predicate and manually implementing Encodable and
Decodable may be simpler.
Derive macros
The rustc_macros crate defines various derives to help implement Decodable
and Encodable.
- The
EncodableandDecodablemacros generate implementations that apply to allEncodersandDecoders. These should be used in crates that don't depend onrustc_middle, or that have to be serialized by a type that does not implementTyEncoder. MetadataEncodableandMetadataDecodablegenerate implementations that only allow decoding byrustc_metadata::rmeta::encoder::EncodeContextandrustc_metadata::rmeta::decoder::DecodeContext. These are used for types that containrustc_metadata::rmeta::Lazy*.TyEncodableandTyDecodablegenerate implementation that apply to anyTyEncoderorTyDecoder. These should be used for types that are only serialized in crate metadata and/or the incremental cache, which is most serializable types inrustc_middle.
Shorthands
Ty can be deeply recursive, if each Ty was encoded naively then crate
metadata would be very large. To handle this, each TyEncoder has a cache of
locations in its output where it has serialized types. If a type being encoded
is in the cache, then instead of serializing the type as usual, the byte offset
within the file being written is encoded instead. A similar scheme is used for
ty::Predicate.
LazyValue<T>
Crate metadata is initially loaded before the TyCtxt<'tcx> is created, so
some deserialization needs to be deferred from the initial loading of metadata.
The LazyValue<T> type wraps the (relative) offset in the crate metadata
where a T has been serialized. There are also some variants, LazyArray<T>
and LazyTable<I, T>.
The LazyArray<[T]> and LazyTable<I, T> types provide some functionality over
Lazy<Vec<T>> and Lazy<HashMap<I, T>>:
- It's possible to encode a
LazyArray<T>directly from anIterator, without first collecting into aVec<T>. - Indexing into a
LazyTable<I, T>does not require decoding entries other than the one being read.
note: LazyValue<T> does not cache its value after being deserialized the
first time. Instead the query system its self is the main way of caching these
results.
Specialization
A few types, most notably DefId, need to have different implementations for
different Encoders. This is currently handled by ad-hoc specializations, for
example: DefId has a default implementation of Encodable<E> and a
specialized one for Encodable<CacheEncoder>.
Parallel Compilation
Tracking issue: https://github.com/rust-lang/rust/issues/113349
As of November 2024, most of the rust compiler is now parallelized.
- The codegen part is executed concurrently by default. You can use the
-C codegen-units=noption to control the number of concurrent tasks. - The parts after HIR lowering to codegen such as type checking, borrowing
checking, and mir optimization are parallelized in the nightly version.
Currently, they are executed in serial by default, and parallelization is
manually enabled by the user using the
-Z threads = noption. - Other parts, such as lexical parsing, HIR lowering, and macro expansion, are still executed in serial mode.
Code Generation
During monomorphization the compiler splits up all the code to
be generated into smaller chunks called codegen units. These are then generated by
independent instances of LLVM running in parallel. At the end, the linker
is run to combine all the codegen units together into one binary. This process
occurs in the rustc_codegen_ssa::base module.
Data Structures
The underlying thread-safe data-structures used in the parallel compiler
can be found in the rustc_data_structures::sync module. These data structures
are implemented differently depending on whether parallel-compiler is true.
| data structure | parallel | non-parallel |
|---|---|---|
| Lrc | std::sync::Arc | std::rc::Rc |
| Weak | std::sync::Weak | std::rc::Weak |
| Atomic{Bool}/{Usize}/{U32}/{U64} | std::sync::atomic::Atomic{Bool}/{Usize}/{U32}/{U64} | (std::cell::Cell<bool/usize/u32/u64>) |
| OnceCell | std::sync::OnceLock | std::cell::OnceCell |
| Lock<T> | (parking_lot::Mutex<T>) | (std::cell::RefCell) |
| RwLock<T> | (parking_lot::RwLock<T>) | (std::cell::RefCell) |
| MTRef<'a, T> | &'a T | &'a mut T |
| MTLock<T> | (Lock<T>) | (T) |
| ReadGuard | parking_lot::RwLockReadGuard | std::cell::Ref |
| MappedReadGuard | parking_lot::MappedRwLockReadGuard | std::cell::Ref |
| WriteGuard | parking_lot::RwLockWriteGuard | std::cell::RefMut |
| MappedWriteGuard | parking_lot::MappedRwLockWriteGuard | std::cell::RefMut |
| LockGuard | parking_lot::MutexGuard | std::cell::RefMut |
| MappedLockGuard | parking_lot::MappedMutexGuard | std::cell::RefMut |
-
These thread-safe data structures are interspersed during compilation which can cause lock contention resulting in degraded performance as the number of threads increases beyond 4. So we audit the use of these data structures which leads to either a refactoring so as to reduce the use of shared state, or the authoring of persistent documentation covering the specific of the invariants, the atomicity, and the lock orderings.
-
On the other hand, we still need to figure out what other invariants during compilation might not hold in parallel compilation.
WorkerLocal
WorkerLocal is a special data structure implemented for parallel compilers. It
holds worker-locals values for each thread in a thread pool. You can only
access the worker local value through the Deref impl on the thread pool it
was constructed on. It panics otherwise.
WorkerLocal is used to implement the Arena allocator in the parallel
environment, which is critical in parallel queries. Its implementation is
located in the rustc_data_structures::sync::worker_local module. However,
in the non-parallel compiler, it is implemented as (OneThread<T>), whose T
can be accessed directly through Deref::deref.
Parallel Iterator
The parallel iterators provided by the rayon crate are easy ways to
implement parallelism. In the current implementation of the parallel compiler
we use a custom fork of rayon to run tasks in parallel.
Some iterator functions are implemented to run loops in parallel
when parallel-compiler is true.
Function(Omit Send and Sync) | Introduction | Owning Module |
|---|---|---|
| par_iter<T: IntoParallelIterator>(t: T) -> T::Iter | generate a parallel iterator | rustc_data_structure::sync |
| par_for_each_in<T: IntoParallelIterator>(t: T, for_each: impl Fn(T::Item)) | generate a parallel iterator and run for_each on each element | rustc_data_structure::sync |
| Map::par_body_owners(self, f: impl Fn(LocalDefId)) | run f on all hir owners in the crate | rustc_middle::hir::map |
| Map::par_for_each_module(self, f: impl Fn(LocalDefId)) | run f on all modules and sub modules in the crate | rustc_middle::hir::map |
| ModuleItems::par_items(&self, f: impl Fn(ItemId)) | run f on all items in the module | rustc_middle::hir |
| ModuleItems::par_trait_items(&self, f: impl Fn(TraitItemId)) | run f on all trait items in the module | rustc_middle::hir |
| ModuleItems::par_impl_items(&self, f: impl Fn(ImplItemId)) | run f on all impl items in the module | rustc_middle::hir |
| ModuleItems::par_foreign_items(&self, f: impl Fn(ForeignItemId)) | run f on all foreign items in the module | rustc_middle::hir |
There are a lot of loops in the compiler which can possibly be parallelized using these functions. As of August 2022, scenarios where the parallel iterator function has been used are as follows:
| caller | scenario | callee |
|---|---|---|
| rustc_metadata::rmeta::encoder::prefetch_mir | Prefetch queries which will be needed later by metadata encoding | par_iter |
| rustc_monomorphize::collector::collect_crate_mono_items | Collect monomorphized items reachable from non-generic items | par_for_each_in |
| rustc_interface::passes::analysis | Check the validity of the match statements | Map::par_body_owners |
| rustc_interface::passes::analysis | MIR borrow check | Map::par_body_owners |
| rustc_typeck::check::typeck_item_bodies | Type check | Map::par_body_owners |
| rustc_interface::passes::hir_id_validator::check_crate | Check the validity of hir | Map::par_for_each_module |
| rustc_interface::passes::analysis | Check the validity of loops body, attributes, naked functions, unstable abi, const bodys | Map::par_for_each_module |
| rustc_interface::passes::analysis | Liveness and intrinsic checking of MIR | Map::par_for_each_module |
| rustc_interface::passes::analysis | Deathness checking | Map::par_for_each_module |
| rustc_interface::passes::analysis | Privacy checking | Map::par_for_each_module |
| rustc_lint::late::check_crate | Run per-module lints | Map::par_for_each_module |
| rustc_typeck::check_crate | Well-formedness checking | Map::par_for_each_module |
There are still many loops that have the potential to use parallel iterators.
Query System
The query model has some properties that make it actually feasible to evaluate multiple queries in parallel without too much effort:
- All data a query provider can access is via the query context, so the query context can take care of synchronizing access.
- Query results are required to be immutable so they can safely be used by different threads concurrently.
When a query foo is evaluated, the cache table for foo is locked.
- If there already is a result, we can clone it, release the lock and we are done.
- If there is no cache entry and no other active query invocation computing the same result, we mark the key as being "in progress", release the lock and start evaluating.
- If there is another query invocation for the same key in progress, we release the lock, and just block the thread until the other invocation has computed the result we are waiting for. Cycle error detection in the parallel compiler requires more complex logic than in single-threaded mode. When worker threads in parallel queries stop making progress due to interdependence, the compiler uses an extra thread (named deadlock handler) to detect, remove and report the cycle error.
The parallel query feature still has implementation to do, most of which is
related to the previous Data Structures and Parallel Iterators. See this
open feature tracking issue.
Rustdoc
As of November 2022, there are still a number of steps to
complete before rustdoc rendering can be made parallel (see a open discussion
of parallel rustdoc).
Resources
Here are some resources that can be used to learn more:
- This IRLO thread by alexchricton about performance
- This IRLO thread by Zoxc, one of the pioneers of the effort
- This list of interior mutability in the compiler by nikomatsakis
Rustdoc Internals
- From Crate to Clean
- From Clean To HTML
- Other Tricks Up Its Sleeve
- Dotting i's And Crossing t's
- Testing Locally
- See Also
This page describes rustdoc's passes and modes. For an overview of rustdoc,
see the "Rustdoc overview" chapter.
From Crate to Clean
In core.rs are two central items: the rustdoc::core::DocContext
struct, and the rustdoc::core::run_global_ctxt function. The latter is
where rustdoc calls out to rustc to compile a crate to the point where
rustdoc can take over. The former is a state container used when crawling
through a crate to gather its documentation.
The main process of crate crawling is done in clean/mod.rs through several
functions with names that start with clean_. Each function accepts an hir
or ty data structure, and outputs a clean structure used by rustdoc. For
example, this function for converting lifetimes:
fn clean_lifetime<'tcx>(lifetime: &hir::Lifetime, cx: &mut DocContext<'tcx>) -> Lifetime {
if let Some(
rbv::ResolvedArg::EarlyBound(did)
| rbv::ResolvedArg::LateBound(_, _, did)
| rbv::ResolvedArg::Free(_, did),
) = cx.tcx.named_bound_var(lifetime.hir_id)
&& let Some(lt) = cx.args.get(&did).and_then(|arg| arg.as_lt())
{
return lt.clone();
}
Lifetime(lifetime.ident.name)
}
Also, clean/mod.rs defines the types for the "cleaned" Abstract Syntax Tree
(AST) used later to render documentation pages. Each usually accompanies a
clean_* function that takes some AST or High-Level Intermediate
Representation (HIR) type from rustc and converts it into the
appropriate "cleaned" type. "Big" items like modules or associated items may
have some extra processing in its clean function, but for the most part these
impls are straightforward conversions. The "entry point" to this module is
clean::utils::krate, which is called by run_global_ctxt.
The first step in clean::utils::krate is to invoke
visit_ast::RustdocVisitor to process the module tree into an intermediate
visit_ast::Module. This is the step that actually crawls the
rustc_hir::Crate, normalizing various aspects of name resolution, such as:
- handling
#[doc(inline)]and#[doc(no_inline)] - handling import globs and cycles, so there are no duplicates or infinite directory trees
- inlining public
useexports of private items, or showing a "Reexport" line in the module page - inlining items with
#[doc(hidden)]if the base item is hidden but the - showing
#[macro_export]-ed macros at the crate root, regardless of where they're defined reexport is not
After this step, clean::krate invokes clean_doc_module, which actually
converts the HIR items to the cleaned AST. This is also the step where cross-
crate inlining is performed, which requires converting rustc_middle data
structures into the cleaned AST.
The other major thing that happens in clean/mod.rs is the collection of doc
comments and #[doc=""] attributes into a separate field of the Attributes
struct, present on anything that gets hand-written documentation. This makes it
easier to collect this documentation later in the process.
The primary output of this process is a clean::types::Crate with a tree of Items
which describe the publicly-documentable items in the target crate.
Passes Anything But a Gas Station (or: Hot Potato)
Before moving on to the next major step, a few important "passes" occur over
the cleaned AST. Several of these passes are lints and reports, but some of
them mutate or generate new items.
These are all implemented in the librustdoc/passes directory, one file per pass.
By default, all of these passes are run on a crate, but the ones
regarding dropping private/hidden items can be bypassed by passing
--document-private-items to rustdoc. Note that unlike the previous set of AST
transformations, the passes are run on the cleaned crate.
Here is the list of passes as of March 2023:
-
calculate-doc-coveragecalculates information used for the--show-coverageflag. -
check-doc-test-visibilityrunsdoctestvisibility–relatedlints. This pass runs beforestrip-private, which is why it needs to be separate fromrun-lints. -
collect-intra-doc-linksresolves intra-doc links. -
collect-trait-implscollectstraitimpls for each item in the crate. For example, if we define astructthat implements atrait, this pass will note that thestructimplements thattrait. -
propagate-doc-cfgpropagates#[doc(cfg(...))]to child items. -
run-lintsruns some ofrustdoc'slints, defined inpasses/lint. This is the last pass to run.-
bare_urlsdetects links that are not linkified, e.g., in Markdown such asGo to https://example.com/.It suggests wrapping the link with angle brackets:Go to <https://example.com/>.to linkify it. This is the code behind therustdoc::bare_urlslint. -
check_code_block_syntaxvalidates syntax inside Rust code blocks (```rust) -
html_tagsdetects invalidHTML(like an unclosed<span>) in doc comments.
-
-
strip-hiddenandstrip-privatestrip alldoc(hidden)and private items from the output.strip-privateimpliesstrip-priv-imports. Basically, the goal is to remove items that are not relevant for public documentation. This pass is skipped when--document-hidden-itemsis passed. -
strip-priv-importsstrips all private import statements (use,extern crate) from a crate. This is necessary becauserustdocwill handle public imports by either inlining the item's documentation to the module or creating a "Reexports" section with the import in it. The pass ensures that all of these imports are actually relevant to documentation. It is technically only run when--document-private-itemsis passed, butstrip-privateaccomplishes the same thing. -
strip-privatestrips all private items from a crate which cannot be seen externally. This pass is skipped when--document-private-itemsis passed.
There is also a stripper module in librustdoc/passes, but it is a
collection of utility functions for the strip-* passes and is not a pass
itself.
From Clean To HTML
This is where the "second phase" in rustdoc begins. This phase primarily lives
in the librustdoc/formats and librustdoc/html folders, and it all starts with
formats::renderer::run_format. This code is responsible for setting up a type that
impl FormatRenderer, which for HTML is Context.
This structure contains methods that get called by run_format to drive the
doc rendering, which includes:
initgeneratesstatic.files, as well as search index andsrc/itemgenerates the itemHTMLfiles themselvesafter_krategenerates other global resources likeall.html
In item, the "page rendering" occurs, via a mixture of Askama templates
and manual write!() calls, starting in html/layout.rs. The parts that have
not been converted to templates occur within a series of std::fmt::Display
implementations and functions that pass around a &mut std::fmt::Formatter.
The parts that actually generate HTML from the items and documentation start
with print_item defined in html/render/print_item.rs, which switches out
to one of several item_* functions based on kind of Item being rendered.
Depending on what kind of rendering code you're looking for, you'll probably
find it either in html/render/mod.rs for major items like "what sections
should I print for a struct page" or html/format.rs for smaller component
pieces like "how should I print a where clause as part of some other item".
Whenever rustdoc comes across an item that should print hand-written
documentation alongside, it calls out to html/markdown.rs which interfaces
with the Markdown parser. This is exposed as a series of types that wrap a
string of Markdown, and implement fmt::Display to emit HTML text. It takes
special care to enable certain features like footnotes and tables and add
syntax highlighting to Rust code blocks (via html/highlight.rs) before
running the Markdown parser. There's also a function find_codes which is
called by find_testable_codes that specifically scans for Rust code blocks so
the test-runner code can find all the doctests in the crate.
From Soup to Nuts (or: "An Unbroken Thread Stretches From Those First Cells To Us")
It's important to note that rustdoc can ask the compiler for type information
directly, even during HTML generation. This didn't used to be the case, and
a lot of rustdoc's architecture was designed around not doing that, but a
TyCtxt is now passed to formats::renderer::run_format, which is used to
run generation for both HTML and the
(unstable as of March 2023) JSON format.
This change has allowed other changes to remove data from the "clean" AST
that can be easily derived from TyCtxt queries, and we'll usually accept
PRs that remove fields from "clean" (it's been soft-deprecated), but this
is complicated from two other constraints that rustdoc runs under:
- Docs can be generated for crates that don't actually pass type checking.
This is used for generating docs that cover mutually-exclusive platform
configurations, such as
libstdhaving a single package of docs that cover all supported operating systems. This meansrustdochas to be able to generate docs fromHIR. - Docs can inline across crates. Since crate metadata doesn't contain
HIR, it must be possible to generate inlined docs from therustc_middledata.
The "clean" AST acts as a common output format for both input formats. There
is also some data in clean that doesn't correspond directly to HIR, such as
synthetic impls for auto traits and blanket impls generated by the
collect-trait-impls pass.
Some additional data is stored in
html::render::context::{Context, SharedContext}. These two types serve as
ways to segregate rustdoc's data for an eventual future with multithreaded doc
generation, as well as just keeping things organized:
Contextstores data used for generating the current page, such as its path, a list ofHTMLIDs that have been used (to avoid duplicateid=""), and the pointer toSharedContext.SharedContextstores data that does not vary by page, such as thetcxpointer, and a list of all types.
Other Tricks Up Its Sleeve
All this describes the process for generating HTML documentation from a Rust
crate, but there are couple other major modes that rustdoc runs in. It can also
be run on a standalone Markdown file, or it can run doctests on Rust code or
standalone Markdown files. For the former, it shortcuts straight to
html/markdown.rs, optionally including a mode which inserts a Table of
Contents to the output HTML.
For the latter, rustdoc runs a similar partial-compilation to get relevant
documentation in test.rs, but instead of going through the full clean and
render process, it runs a much simpler crate walk to grab just the
hand-written documentation. Combined with the aforementioned
"find_testable_code" in html/markdown.rs, it builds up a collection of
tests to run before handing them off to the test runner. One notable location
in test.rs is the function make_test, which is where hand-written
doctests get transformed into something that can be executed.
Some extra reading about make_test can be found
here.
Dotting i's And Crossing t's
So that's rustdoc's code in a nutshell, but there's more things in the
compiler that deal with it. Since we have the full compiletest suite at hand,
there's a set of tests in tests/rustdoc that make sure the final HTML is
what we expect in various situations. These tests also use a supplementary
script, src/etc/htmldocck.py, that allows it to look through the final HTML
using XPath notation to get a precise look at the output. The full
description of all the commands available to rustdoc tests (e.g. @has and
@matches) is in htmldocck.py.
To use multiple crates in a rustdoc test, add // aux-build:filename.rs
to the top of the test file. filename.rs should be placed in an auxiliary
directory relative to the test file with the comment. If you need to build
docs for the auxiliary file, use // build-aux-docs.
In addition, there are separate tests for the search index and rustdoc's
ability to query it. The files in tests/rustdoc-js each contain a
different search query and the expected results, broken out by search tab.
These files are processed by a script in src/tools/rustdoc-js and the Node.js
runtime. These tests don't have as thorough of a writeup, but a broad example
that features results in all tabs can be found in basic.js. The basic idea is
that you match a given QUERY with a set of EXPECTED results, complete with
the full item path of each item.
Testing Locally
Some features of the generated HTML documentation might require local
storage to be used across pages, which doesn't work well without an HTTP
server. To test these features locally, you can run a local HTTP server, like
this:
$ ./x doc library
# The documentation has been generated into `build/[YOUR ARCH]/doc`.
$ python3 -m http.server -d build/[YOUR ARCH]/doc
Now you can browse your documentation just like you would if it was hosted
on the internet. For example, the url for std will be rust/std/.
See Also
Rustdoc search
Rustdoc Search is two programs: search_index.rs
and search.js. The first generates a nasty JSON
file with a full list of items and function signatures
in the crates in the doc bundle, and the second reads
it, turns it into some in-memory structures, and
scans them linearly to search.
Search index format
search.js calls this Raw, because it turns it into
a more normal object tree after loading it.
For space savings, it's also written without newlines or spaces.
[
[ "crate_name", {
// name
"n": ["function_name", "Data"],
// type
"t": "HF",
// parent module
"q": [[0, "crate_name"]],
// parent type
"i": [2, 0],
// type dictionary
"p": [[1, "i32"], [1, "str"], [5, "Data", 0]],
// function signature
"f": "{{gb}{d}}`", // [[3, 1], [2]]
// impl disambiguator
"b": [],
// deprecated flag
"c": "OjAAAAAAAAA=", // empty bitmap
// empty description flag
"e": "OjAAAAAAAAA=", // empty bitmap
// aliases
"a": [["get_name", 0]],
// description shards
"D": "g", // 3
// inlined re-exports
"r": [],
}]
]
src/librustdoc/html/static/js/externs.js
defines an actual schema in a Closure @typedef.
| Key | Name | Description |
|---|---|---|
n | Names | Item names |
t | Item Type | One-char item type code |
q | Parent module | Map<index, path> |
i | Parent type | list of indexes |
f | Function signature | encoded |
b | Impl disambiguator | Map<index, string> |
c | Deprecation flag | roaring bitmap |
e | Description is empty | roaring bitmap |
p | Type dictionary | [[item type, path]] |
a | Alias | Map<string, index> |
D | description shards | encoded |
The above index defines a crate called crate_name
with a free function called function_name and a struct called Data,
with the type signature Data, i32 -> str,
and an alias, get_name, that equivalently refers to function_name.
The search index needs to fit the needs of the rustdoc compiler,
the search.js frontend,
and also be compact and fast to decode.
It makes a lot of compromises:
- The
rustdoccompiler runs on one crate at a time, so each crate has an essentially separate search index. It merges them by having each crate on one line and looking at the first quoted string. - Names in the search index are given
in their original case and with underscores.
When the search index is loaded,
search.jsstores the original names for display, but also folds them to lowercase and strips underscores for search. You'll see them callednormalized. - The
farray stores types as offsets into theparray. These types might actually be from another crate, sosearch.jshas to turn the numbers into names and then back into numbers to deduplicate them if multiple crates in the same index mention the same types. - It's a JSON file, but not designed to be human-readable.
Browsers already include an optimized JSON decoder,
so this saves on
search.jscode and performs better for small crates, but instead of using objects like normal JSON formats do, it tries to put data of the same type next to each other so that the sliding window used by DEFLATE can find redundancies. Wheresearch.jsdoes its own compression, it's designed to save memory when the file is finally loaded, not just size on disk or network transfer.
Parallel arrays and indexed maps
Abstractly, Rustdoc Search data is a table, stored in column-major form. Most data in the index represents a set of parallel arrays (the "columns") which refer to the same data if they're at the same position.
For example, the above search index can be turned into this table:
| n | t | d | q | i | f | b | c | |
|---|---|---|---|---|---|---|---|---|
| 0 | crate_name | D | Documentation | NULL | 0 | NULL | NULL | 0 |
| 1 | function_name | H | This function gets the name of an integer with Data | crate_name | 2 | {{gb}{d}} | NULL | 0 |
| 2 | Data | F | The data struct | crate_name | 0 | ` | NULL | 0 |
The crate row is implied in most columns, since its type is known (it's a crate),
it can't have a parent (crates form the root of the module tree),
its name is specified as the map key,
and function-specific data like the impl disambiguator can't apply either.
However, it can still have a description and it can still be deprecated.
The crate, therefore, has a primary key of 0.
The above code doesn't use c, which holds deprecated indices,
or b, which maps indices to strings.
If crate_name::function_name used both, it might look like this.
"b": [[0, "impl-Foo-for-Bar"]],
"c": "OjAAAAEAAAAAAAIAEAAAABUAbgZYCQ==",
This attaches a disambiguator to index 1 and marks it deprecated.
The advantage of this layout is that these APIs often have implicit structure that DEFLATE can take advantage of, but that rustdoc can't assume. Like how names are usually CamelCase or snake_case, but descriptions aren't. It also makes it easier to use a sparse data for things like boolean flags.
q is a Map from the first applicable ID to a parent module path.
This is a weird trick, but it makes more sense in pseudo-code:
#![allow(unused)] fn main() { let mut parent_module = ""; for (i, entry) in search_index.iter().enumerate() { if q.contains(i) { parent_module = q.get(i); } // ... do other stuff with `entry` ... } }
This is valid because everything has a parent module (even if it's just the crate itself), and is easy to assemble because the rustdoc generator sorts by path before serializing. Doing this allows rustdoc to not only make the search index smaller, but reuse the same string representing the parent path across multiple in-memory items.
Representing sparse columns
VLQ Hex
This format is, as far as I know, used nowhere other than rustdoc. It follows this grammar:
VLQHex = { VHItem | VHBackref }
VHItem = VHNumber | ( '{', {VHItem}, '}' )
VHNumber = { '@' | 'A' | 'B' | 'C' | 'D' | 'E' | 'F' | 'G' | 'H' | 'I' | 'J' | 'K' | 'L' | 'M' | 'N' | 'O' }, ( '`' | 'a' | 'b' | 'c' | 'd' | 'e' | 'f' | 'g' | 'h' | 'i' | 'j' | 'k ' | 'l' | 'm' | 'n' | 'o' )
VHBackref = ( '0' | '1' | '2' | '3' | '4' | '5' | '6' | '7' | '8' | '9' | ':' | ';' | '<' | '=' | '>' | '?' )
A VHNumber is a variable-length, self-terminating base16 number (terminated because the last hexit is lowercase while all others are uppercase). The sign bit is represented using zig-zag encoding.
This alphabet is chosen because the characters can be turned into hexits by masking off the last four bits of the ASCII encoding.
A major feature of this encoding, as with all of the "compression" done in rustdoc,
is that it can remain in its compressed format even in memory at runtime.
This is why HBackref is only used at the top level,
and why we don't just use Flate for everything: the decoder in search.js
will reuse the entire decoded object whenever a backref is seen,
saving decode work and memory.
Roaring Bitmaps
Flag-style data, such as deprecation and empty descriptions, are stored using the standard Roaring Bitmap serialization format with runs. The data is then base64 encoded when writing it.
As a brief overview: a roaring bitmap is a chunked array of bits, described in this paper. A chunk can either be a list of integers, a bitfield, or a list of runs. In any case, the search engine has to base64 decode it, and read the chunk index itself, but the payload data stays as-is.
All roaring bitmaps in rustdoc currently store a flag for each item index. The crate is item 0, all others start at 1.
How descriptions are stored
The largest amount of data, and the main thing Rustdoc Search deals with that isn't actually used for searching, is descriptions. In a SERP table, this is what appears on the rightmost column.
item type item path description (this part) function my_crate::my_function This function gets the name of an integer with Data
When someone runs a search in rustdoc for the first time, their browser will work through a "sandwich workload" of three steps:
- Download the search-index.js and search.js files (a network bottleneck).
- Perform the actual search (a CPU and memory bandwidth bottleneck).
- Download the description data (another network bottleneck).
Reducing the amount of data downloaded here will almost always increase latency, by delaying the decision of what to download behind other work and/or adding data dependencies where something can't be downloaded without first downloading something else. In this case, we can't start downloading descriptions until after the search is done, because that's what allows it to decide which descriptions to download (it needs to sort the results then truncate to 200).
To do this, two columns are stored in the search index, building on both Roaring Bitmaps and on VLQ Hex.
eis an index of empty descriptions. It's a roaring bitmap of each item (the crate itself is item 0, the rest start at 1).Dis a shard list, stored in VLQ hex as flat list of integers. Each integer gives you the number of descriptions in the shard. As the decoder walks the index, it checks if the description is empty. if it's not, then it's in the "current" shard. When all items are exhausted, it goes on to the next shard.
Inside each shard is a newline-delimited list of descriptions, wrapped in a JSONP-style function call.
i, f, and p
i and f both index into p, the array of parent items.
i is just a one-indexed number
(not zero-indexed because 0 is used for items that have no parent item).
It's different from q because q represents the parent module or crate,
which everything has,
while i/q are used for type and trait-associated items like methods.
f, the function signatures, use a VLQ hex tree.
A number is either a one-indexed reference into p,
a negative number representing a generic,
or zero for null.
(the internal object representation also uses negative numbers, even after decoding, to represent generics).
For example, {{gb}{d}} is equivalent to the json [[3, 1], [2]].
Because of zigzag encoding, ` is +0, a is -0 (which is not used),
b is +1, and c is -1.
Searching by name
Searching by name works by looping through the search index and running these functions on each:
editDistanceis always used to determine a match (unless quotes are specified, which would use simple equality instead). It computes the number of swaps, inserts, and removes needed to turn the query name into the entry name. For example,foohas zero distance from itself, but a distance of 1 fromofo(one swap) andfoob(one insert). It is checked against an heuristic threshold, and then, if it is within that threshold, the distance is stored for ranking.String.prototype.indexOfis always used to determine a match. If it returns anything other than -1, the result is added, even ifeditDistanceexceeds its threshold, and the index is stored for ranking.checkPathis used if, and only if, a parent path is specified in the query. For example,vechas no parent path, butvec::vecdoes. Within checkPath, editDistance and indexOf are used, and the path query has its own heuristic threshold, too. If it's not within the threshold, the entry is rejected, even if the first two pass. If it's within the threshold, the path distance is stored for ranking.checkTypeis used only if there's a type filter, like the struct instruct:vec. If it fails, the entry is rejected.
If all four criteria pass
(plus the crate filter, which isn't technically part of the query),
the results are sorted by sortResults.
Searching by type
Searching by type can be divided into two phases, and the second phase has two sub-phases.
- Turn names in the query into numbers.
- Loop over each entry in the search index:
- Quick rejection using a bloom filter.
- Slow rejection using a recursive type unification algorithm.
In the names->numbers phase, if the query has only one name in it,
the editDistance function is used to find a near match if the exact match fails,
but if there's multiple items in the query,
non-matching items are treated as generics instead.
This means hahsmap will match hashmap on its own, but hahsmap, u32
is going to match the same things T, u32 matches
(though rustdoc will detect this particular problem and warn about it).
Then, when actually looping over each item,
the bloom filter will probably reject entries that don't have every
type mentioned in the query.
For example, the bloom query allows a query of i32 -> u32 to match
a function with the type i32, u32 -> bool,
but unification will reject it later.
The unification filter ensures that:
- Bag semantics are respected. If you query says
i32, i32, then the function has to mention two i32s, not just one. - Nesting semantics are respected. If your query says
vec<option>, thenvec<option<i32>>is fine, butoption<vec<i32>>is not a match. - The division between return type and parameter is respected.
i32 -> u32andu32 -> i32are completely different.
The bloom filter checks none of these things, and, on top of that, can have false positives. But it's fast and uses very little memory, so the bloom filter helps.
Re-exports
Re-export inlining allows the same item to be found by multiple names. Search supports this by giving the same item multiple entries and tracking a canonical path for any items where that differs from the given path.
For example, this sample index has a single struct exported from two paths:
[
[ "crate_name", {
"doc": "Documentation",
"n": ["Data", "Data"],
"t": "FF",
"d": ["The data struct", "The data struct"],
"q": [[0, "crate_name"], [1, "crate_name::submodule"]],
"i": [0, 0],
"p": [],
"f": "``",
"b": [],
"c": [],
"a": [],
"r": [[0, 1]],
}]
]
The important part of this example is the r array,
which indicates that path entry 1 in the q array is
the canonical path for item 0.
That is, crate_name::Data has a canonical path of crate_name::submodule::Data.
This might sound like a strange design, since it has the duplicate data. It's done that way because inlining can happen across crates, which are compiled separately and might not all be present in the docs.
[
[ "crate_name", ... ],
[ "crate_name_2", { "q": [[0, "crate_name::submodule"], [5, "core::option"]], ... }]
]
In the above example, a canonical path actually comes from a dependency, and another one comes from an inlined standard library item: the canonical path isn't even in the index! The canonical path might also be private. In either case, it's never shown to the user, and is only used for deduplication.
Associated types, like methods, store them differently.
These types are connected with an entry in p (their "parent")
and each one has an optional third tuple element:
"p": [[5, "Data", 0, 1]]
That's:
- 5: It's a struct
- "Data": Its name
- 0: Its display path, "crate_name"
- 1: Its canonical path, "crate_name::submodule"
In both cases, the canonical path might not be public at all, or it might be from another crate that isn't in the docs, so it's never shown to the user, but is used for deduplication.
Testing the search engine
While the generated UI is tested using rustdoc-gui tests, the
primary way the search engine is tested is the rustdoc-js and
rustdoc-js-std tests. They run in NodeJS.
A rustdoc-js test has a .rs and .js file, with the same name.
The .rs file specifies the hypothetical library crate to run
the searches on (make sure you mark anything you need to find as pub).
The .js file specifies the actual searches.
The rustdoc-js-std tests are the same, but don't require an .rs
file, since they use the standard library.
The .js file is like a module (except the loader takes care of
exports for you). It uses these variables:
| Name | Type | Description |
|---|---|---|
FILTER_CRATE | string | Only include results from the given crate. In the GUI, this is the "Results in crate" drop-down menu. |
EXPECTED | [ResultsTable]\|ResultsTable | List of tests to run, specifying what the hypothetical user types into the search box and sees in the tabs |
PARSED | [ParsedQuery]\|ParsedQuery | List of parser tests to run, without running an actual search |
FILTER_CRATE can be left out (equivalent to searching "all crates"), but you
have to specify EXPECTED or PARSED.
By default, the test fails if any of the results specified in the test case are not found after running the search, or if the results found after running the search don't appear in the same order that they do in the test. The actual search results may, however, include results that aren't in the test. To override this, specify any of the following magic comments. Put them on their own line, without indenting.
// exact-check: If search results appear that aren't part of the test case, then fail.// ignore-order: Allow search results to appear in any order.// should-fail: Used to write negative tests.
Standard library tests usually shouldn't specify // exact-check, since we
want the libs team to be able to add new items without causing unrelated
tests to fail, but standalone tests will use it more often.
The ResultsTable and ParsedQuery types are specified in
externs.js.
For example, imagine we needed to fix a bug where a function named
constructor couldn't be found. To do this, write two files:
#![allow(unused)] fn main() { // tests/rustdoc-js/constructor_search.rs // The test case needs to find this result. pub fn constructor(_input: &str) -> i32 { 1 } }
// tests/rustdoc-js/constructor_search.js
// exact-check
// Since this test runs against its own crate,
// new items should not appear in the search results.
const EXPECTED = [
// This first test targets name-based search.
{
query: "constructor",
others: [
{ path: "constructor_search", name: "constructor" },
],
in_args: [],
returned: [],
},
// This test targets the second tab.
{
query: "str",
others: [],
in_args: [
{ path: "constructor_search", name: "constructor" },
],
returned: [],
},
// This test targets the third tab.
{
query: "i32",
others: [],
in_args: [],
returned: [
{ path: "constructor_search", name: "constructor" },
],
},
// This test targets advanced type-driven search.
{
query: "str -> i32",
others: [
{ path: "constructor_search", name: "constructor" },
],
in_args: [],
returned: [],
},
]
Source Code Representation
This part describes the process of taking raw source code from the user and transforming it into various forms that the compiler can work with easily. These are called intermediate representations (IRs).
This process starts with compiler understanding what the user has asked for: parsing the command line arguments given and determining what it is to compile. After that, the compiler transforms the user input into a series of IRs that look progressively less like what the user wrote.
Command-line Arguments
Command-line flags are documented in the rustc book. All stable flags should be documented there. Unstable flags should be documented in the unstable book.
See the forge guide for new options for details on the procedure for adding a new command-line argument.
Guidelines
- Flags should be orthogonal to each other. For example, if we'd have a
json-emitting variant of multiple actions
fooandbar, an additional--jsonflag is better than adding--foo-jsonand--bar-json. - Avoid flags with the
no-prefix. Instead, use theparse_boolfunction, such as-C embed-bitcode=no. - Consider the behavior if the flag is passed multiple times. In some
situations, the values should be accumulated (in order!). In other
situations, subsequent flags should override previous flags (for example,
the lint-level flags). And some flags (like
-o) should generate an error if it is too ambiguous what multiple flags would mean. - Always give options a long descriptive name, if only for more understandable compiler scripts.
- The
--verboseflag is for adding verbose information torustcoutput. For example, using it with the--versionflag gives information about the hashes of the compiler code. - Experimental flags and options must be guarded behind the
-Z unstable-optionsflag.
rustc_driver and rustc_interface
The rustc_driver is essentially rustc's main function.
It acts as the glue for running the various phases of the compiler in the correct order,
using the interface defined in the rustc_interface crate.
Generally the rustc_interface crate provides external users with an (unstable) API
for running code at particular times during the compilation process, allowing
third parties to effectively use rustc's internals as a library for
analyzing a crate or for ad hoc emulating of the compiler (i.e. rustdoc
compiling code and serving output).
More specifically the rustc_interface::run_compiler function is the
main entrypoint for using nightly-rustc as a library.
Initially run_compiler takes a configuration variable for the compiler
and a closure taking a yet unresolved Compiler.
Operationally run_compiler creates a Compiler from the configuration and passes
it to the closure. Inside the closure you can use the Compiler to drive
queries to compile a crate and get the results.
Providing results about the internal state of the compiler what the rustc_driver does too.
You can see a minimal example of how to use rustc_interface here.
You can see what queries are currently available in the Compiler rustdocs.
You can see an example of how to use the queries by looking at the rustc_driver implementation,
specifically rustc_driver::run_compiler
(not to be confused with rustc_interface::run_compiler).
Generally rustc_driver::run_compiler takes a bunch of command-line args
and some other configurations and drives the compilation to completion.
Finally rustc_driver::run_compiler also takes a Callbacks,
which is a trait that allows for custom compiler configuration,
as well as allowing custom code to run after different phases of the compilation.
Warning: By its very nature, the internal compiler APIs are always going to be unstable. That said, we do try not to break things unnecessarily.
Example: Type checking through rustc_interface
The rustc_interface allows you to interact with Rust code at various stages of compilation.
Getting the type of an expression
To get the type of an expression, use the global_ctxt query to get a TyCtxt.
The following was tested with nightly-2024-05-09:
#![feature(rustc_private)] extern crate rustc_ast_pretty; extern crate rustc_driver; extern crate rustc_error_codes; extern crate rustc_errors; extern crate rustc_hash; extern crate rustc_hir; extern crate rustc_interface; extern crate rustc_session; extern crate rustc_span; use std::{path, process, str, sync::Arc}; use rustc_ast_pretty::pprust::item_to_string; use rustc_errors::registry; use rustc_session::config; fn main() { let out = process::Command::new("rustc") .arg("--print=sysroot") .current_dir(".") .output() .unwrap(); let sysroot = str::from_utf8(&out.stdout).unwrap().trim(); let config = rustc_interface::Config { opts: config::Options { maybe_sysroot: Some(path::PathBuf::from(sysroot)), ..config::Options::default() }, input: config::Input::Str { name: rustc_span::FileName::Custom("main.rs".to_string()), input: r#" fn main() { let message = "Hello, World!"; println!("{message}"); } "# .to_string(), }, crate_cfg: Vec::new(), crate_check_cfg: Vec::new(), output_dir: None, output_file: None, file_loader: None, locale_resources: rustc_driver::DEFAULT_LOCALE_RESOURCES, lint_caps: rustc_hash::FxHashMap::default(), psess_created: None, register_lints: None, override_queries: None, make_codegen_backend: None, registry: registry::Registry::new(rustc_errors::codes::DIAGNOSTICS), expanded_args: Vec::new(), ice_file: None, hash_untracked_state: None, using_internal_features: Arc::default(), }; rustc_interface::run_compiler(config, |compiler| { compiler.enter(|queries| { // TODO: add this to -Z unpretty let ast_krate = queries.parse().unwrap().get_mut().clone(); for item in ast_krate.items { println!("{}", item_to_string(&item)); } // Analyze the crate and inspect the types under the cursor. queries.global_ctxt().unwrap().enter(|tcx| { // Every compilation contains a single crate. let hir_krate = tcx.hir(); // Iterate over the top-level items in the crate, looking for the main function. for id in hir_krate.items() { let item = hir_krate.item(id); // Use pattern-matching to find a specific node inside the main function. if let rustc_hir::ItemKind::Fn(_, _, body_id) = item.kind { let expr = &tcx.hir().body(body_id).value; if let rustc_hir::ExprKind::Block(block, _) = expr.kind { if let rustc_hir::StmtKind::Let(let_stmt) = block.stmts[0].kind { if let Some(expr) = let_stmt.init { let hir_id = expr.hir_id; // hir_id identifies the string "Hello, world!" let def_id = item.hir_id().owner.def_id; // def_id identifies the main function let ty = tcx.typeck(def_id).node_type(hir_id); println!("{expr:#?}: {ty:?}"); } } } } } }) }); }); }
Example: Getting diagnostic through rustc_interface
The rustc_interface allows you to intercept diagnostics that would
otherwise be printed to stderr.
Getting diagnostics
To get diagnostics from the compiler,
configure rustc_interface::Config to output diagnostic to a buffer,
and run TyCtxt.analysis.
The following was tested with nightly-2024-09-16:
#![feature(rustc_private)] extern crate rustc_driver; extern crate rustc_error_codes; extern crate rustc_errors; extern crate rustc_hash; extern crate rustc_hir; extern crate rustc_interface; extern crate rustc_session; extern crate rustc_span; use rustc_errors::{ emitter::Emitter, registry, translation::Translate, DiagCtxt, DiagInner, FluentBundle, }; use rustc_session::config; use rustc_span::source_map::SourceMap; use std::{ path, process, str, sync::{Arc, Mutex}, }; struct DebugEmitter { source_map: Arc<SourceMap>, diagnostics: Arc<Mutex<Vec<DiagInner>>>, } impl Translate for DebugEmitter { fn fluent_bundle(&self) -> Option<&Arc<FluentBundle>> { None } fn fallback_fluent_bundle(&self) -> &FluentBundle { panic!("this emitter should not translate message") } } impl Emitter for DebugEmitter { fn emit_diagnostic(&mut self, diag: DiagInner) { self.diagnostics.lock().unwrap().push(diag); } fn source_map(&self) -> Option<&Arc<SourceMap>> { Some(&self.source_map) } } fn main() { let out = process::Command::new("rustc") .arg("--print=sysroot") .current_dir(".") .output() .unwrap(); let sysroot = str::from_utf8(&out.stdout).unwrap().trim(); let buffer: Arc<Mutex<Vec<DiagInner>>> = Arc::default(); let diagnostics = buffer.clone(); let config = rustc_interface::Config { opts: config::Options { maybe_sysroot: Some(path::PathBuf::from(sysroot)), ..config::Options::default() }, // This program contains a type error. input: config::Input::Str { name: rustc_span::FileName::Custom("main.rs".into()), input: " fn main() { let x: &str = 1; } " .into(), }, crate_cfg: Vec::new(), crate_check_cfg: Vec::new(), output_dir: None, output_file: None, file_loader: None, locale_resources: rustc_driver::DEFAULT_LOCALE_RESOURCES, lint_caps: rustc_hash::FxHashMap::default(), psess_created: Some(Box::new(|parse_sess| { parse_sess.set_dcx(DiagCtxt::new(Box::new(DebugEmitter { source_map: parse_sess.clone_source_map(), diagnostics, }))); })), register_lints: None, override_queries: None, registry: registry::Registry::new(rustc_errors::codes::DIAGNOSTICS), make_codegen_backend: None, expanded_args: Vec::new(), ice_file: None, hash_untracked_state: None, using_internal_features: Arc::default(), }; rustc_interface::run_compiler(config, |compiler| { compiler.enter(|queries| { queries.global_ctxt().unwrap().enter(|tcx| { // Run the analysis phase on the local crate to trigger the type error. let _ = tcx.analysis(()); }); }); // If the compiler has encountered errors when this closure returns, it will abort (!) the program. // We avoid this by resetting the error count before returning compiler.sess.dcx().reset_err_count(); }); // Read buffered diagnostics. buffer.lock().unwrap().iter().for_each(|diagnostic| { println!("{diagnostic:#?}"); }); }
Syntax and the AST
Working directly with source code is very inconvenient and error-prone. Thus, before we do anything else, we convert raw source code into an Abstract Syntax Tree (AST). It turns out that doing this involves a lot of work, including lexing, parsing, macro expansion, name resolution, conditional compilation, feature-gate checking, and validation of the AST. In this chapter, we take a look at all of these steps.
Notably, there isn't always a clean ordering between these tasks. For example, macro expansion relies on name resolution to resolve the names of macros and imports. And parsing requires macro expansion, which in turn may require parsing the output of the macro.
Lexing and Parsing
The very first thing the compiler does is take the program (in UTF-8 Unicode text) and turn it into a data format the compiler can work with more conveniently than strings. This happens in two stages: Lexing and Parsing.
- Lexing takes strings and turns them into streams of tokens. For
example,
foo.bar + buzwould be turned into the tokensfoo,.,bar,+, andbuz.
- Parsing takes streams of tokens and turns them into a structured form which is easier for the compiler to work with, usually called an Abstract Syntax Tree (AST) .
An AST mirrors the structure of a Rust program in memory, using a Span to
link a particular AST node back to its source text. The AST is defined in
rustc_ast, along with some definitions for tokens and token
streams, data structures/traits for mutating ASTs, and shared definitions for
other AST-related parts of the compiler (like the lexer and
macro-expansion).
The lexer is developed in rustc_lexer.
The parser is defined in rustc_parse, along with a
high-level interface to the lexer and some validation routines that run after
macro expansion. In particular, the rustc_parse::parser contains
the parser implementation.
The main entrypoint to the parser is via the various parse_* functions and others in
rustc_parse. They let you do things like turn a SourceFile
(e.g. the source in a single file) into a token stream, create a parser from
the token stream, and then execute the parser to get a Crate (the root AST
node).
To minimize the amount of copying that is done,
both StringReader and Parser have lifetimes which bind them to the parent ParseSess.
This contains all the information needed while parsing, as well as the SourceMap itself.
Note that while parsing, we may encounter macro definitions or invocations. We set these aside to be expanded (see Macro Expansion). Expansion itself may require parsing the output of a macro, which may reveal more macros to be expanded, and so on.
More on Lexical Analysis
Code for lexical analysis is split between two crates:
-
rustc_lexercrate is responsible for breaking a&strinto chunks constituting tokens. Although it is popular to implement lexers as generated finite state machines, the lexer inrustc_lexeris hand-written. -
StringReaderintegratesrustc_lexerwith data structures specific torustc. Specifically, it addsSpaninformation to tokens returned byrustc_lexerand interns identifiers.
Macro expansion
- Expansion and AST Integration
- Hygiene and Hierarchies
- Producing Macro Output
- Macros By Example
- Procedural Macros
N.B.
rustc_ast,rustc_expand, andrustc_builtin_macrosare all undergoing refactoring, so some of the links in this chapter may be broken.
Rust has a very powerful macro system. In the previous chapter, we saw how the parser sets aside macros to be expanded (using temporary placeholders). This chapter is about the process of expanding those macros iteratively until we have a complete Abstract Syntax Tree (AST) for our crate with no unexpanded macros (or a compile error).
First, we discuss the algorithm that expands and integrates macro output into ASTs. Next, we take a look at how hygiene data is collected. Finally, we look at the specifics of expanding different types of macros.
Many of the algorithms and data structures described below are in rustc_expand,
with fundamental data structures in rustc_expand::base.
Also of note, cfg and cfg_attr are treated specially from other macros, and are
handled in rustc_expand::config.
Expansion and AST Integration
Firstly, expansion happens at the crate level. Given a raw source code for
a crate, the compiler will produce a massive AST with all macros expanded, all
modules inlined, etc. The primary entry point for this process is the
MacroExpander::fully_expand_fragment method. With few exceptions, we
use this method on the whole crate (see "Eager Expansion"
below for more detailed discussion of edge case expansion issues).
At a high level, fully_expand_fragment works in iterations. We keep a
queue of unresolved macro invocations (i.e. macros we haven't found the
definition of yet). We repeatedly try to pick a macro from the queue, resolve
it, expand it, and integrate it back. If we can't make progress in an
iteration, this represents a compile error. Here is the algorithm:
- Initialize a
queueof unresolved macros. - Repeat until
queueis empty (or we make no progress, which is an error):- Resolve imports in our partially built crate as much as possible.
- Collect as many macro
Invocations as possible from our partially built crate (fn-like, attributes, derives) and add them to the queue. - Dequeue the first element and attempt to resolve it.
- If it's resolved:
- Run the macro's expander function that consumes a
TokenStreamor AST and produces aTokenStreamorAstFragment(depending on the macro kind). (ATokenStreamis a collection ofTokenTrees, each of which are a token (punctuation, identifier, or literal) or a delimited group (anything inside()/[]/{})).- At this point, we know everything about the macro itself and can
call
set_expn_datato fill in its properties in the global data; that is the hygiene data associated withExpnId(see Hygiene below).
- At this point, we know everything about the macro itself and can
call
- Integrate that piece of AST into the currently-existing though
partially-built AST. This is essentially where the "token-like mass"
becomes a proper set-in-stone AST with side-tables. It happens as
follows:
- If the macro produces tokens (e.g. a proc macro), we parse into an AST, which may produce parse errors.
- During expansion, we create
SyntaxContexts (hierarchy 2) (see Hygiene below). - These three passes happen one after another on every AST fragment
freshly expanded from a macro:
NodeIds are assigned byInvocationCollector. This also collects new macro calls from this new AST piece and adds them to the queue.- "Def paths" are created and
DefIds are assigned to them byDefCollector. - Names are put into modules (from the resolver's point of
view) by
BuildReducedGraphVisitor.
- After expanding a single macro and integrating its output, continue
to the next iteration of
fully_expand_fragment.
- Run the macro's expander function that consumes a
- If it's not resolved:
- Put the macro back in the queue.
- Continue to next iteration...
Error Recovery
If we make no progress in an iteration we have reached a compilation error
(e.g. an undefined macro). We attempt to recover from failures (i.e.
unresolved macros or imports) with the intent of generating diagnostics.
Failure recovery happens by expanding unresolved macros into
ExprKind::Err and allows compilation to continue past the first error
so that rustc can report more errors than just the original failure.
Name Resolution
Notice that name resolution is involved here: we need to resolve imports and
macro names in the above algorithm. This is done in
rustc_resolve::macros, which resolves macro paths, validates
those resolutions, and reports various errors (e.g. "not found", "found, but
it's unstable", "expected x, found y"). However, we don't try to resolve
other names yet. This happens later, as we will see in the chapter: Name
Resolution.
Eager Expansion
Eager expansion means we expand the arguments of a macro invocation before the macro invocation itself. This is implemented only for a few special built-in macros that expect literals; expanding arguments first for some of these macro results in a smoother user experience. As an example, consider the following:
macro bar($i: ident) { $i }
macro foo($i: ident) { $i }
foo!(bar!(baz));
A lazy-expansion would expand foo! first. An eager-expansion would expand
bar! first.
Eager-expansion is not a generally available feature of Rust. Implementing
eager-expansion more generally would be challenging, so we implement it for a
few special built-in macros for the sake of user-experience. The built-in
macros are implemented in rustc_builtin_macros, along with some other
early code generation facilities like injection of standard library imports or
generation of test harness. There are some additional helpers for building
AST fragments in rustc_expand::build. Eager-expansion generally
performs a subset of the things that lazy (normal) expansion does. It is done
by invoking fully_expand_fragment on only part of a crate (as opposed
to the whole crate, like we normally do).
Other Data Structures
Here are some other notable data structures involved in expansion and integration:
ResolverExpand- atraitused to break crate dependencies. This allows the resolver services to be used inrustc_ast, despiterustc_resolveand pretty much everything else depending onrustc_ast.ExtCtxt/ExpansionData- holds various intermediate expansion infrastructure data.Annotatable- a piece of AST that can be an attribute target, almost the same thing asAstFragmentexcept for types and patterns that can be produced by macros but cannot be annotated with attributes.MacResult- a "polymorphic" AST fragment, something that can turn into a differentAstFragmentdepending on itsAstFragmentKind(i.e. an item, expression, pattern, etc).
Hygiene and Hierarchies
If you have ever used the C/C++ preprocessor macros, you know that there are some annoying and hard-to-debug gotchas! For example, consider the following C code:
#define DEFINE_FOO struct Bar {int x;}; struct Foo {Bar bar;};
// Then, somewhere else
struct Bar {
...
};
DEFINE_FOO
Most people avoid writing C like this – and for good reason: it doesn't
compile. The struct Bar defined by the macro clashes names with the struct Bar defined in the code. Consider also the following example:
#define DO_FOO(x) {\
int y = 0;\
foo(x, y);\
}
// Then elsewhere
int y = 22;
DO_FOO(y);
Do you see the problem? We wanted to generate a call foo(22, 0), but instead
we got foo(0, 0) because the macro defined its own y!
These are both examples of macro hygiene issues. Hygiene relates to how to handle names defined within a macro. In particular, a hygienic macro system prevents errors due to names introduced within a macro. Rust macros are hygienic in that they do not allow one to write the sorts of bugs above.
At a high level, hygiene within the Rust compiler is accomplished by keeping track of the context where a name is introduced and used. We can then disambiguate names based on that context. Future iterations of the macro system will allow greater control to the macro author to use that context. For example, a macro author may want to introduce a new name to the context where the macro was called. Alternately, the macro author may be defining a variable for use only within the macro (i.e. it should not be visible outside the macro).
The context is attached to AST nodes. All AST nodes generated by macros have
context attached. Additionally, there may be other nodes that have context
attached, such as some desugared syntax (non-macro-expanded nodes are
considered to just have the "root" context, as described below).
Throughout the compiler, we use rustc_span::Spans to refer to code locations.
This struct also has hygiene information attached to it, as we will see later.
Because macros invocations and definitions can be nested, the syntax context of a node must be a hierarchy. For example, if we expand a macro and there is another macro invocation or definition in the generated output, then the syntax context should reflect the nesting.
However, it turns out that there are actually a few types of context we may want to track for different purposes. Thus, there are not just one but three expansion hierarchies that together comprise the hygiene information for a crate.
All of these hierarchies need some sort of "macro ID" to identify individual
elements in the chain of expansions. This ID is ExpnId. All macros receive
an integer ID, assigned continuously starting from 0 as we discover new macro
calls. All hierarchies start at ExpnId::root, which is its own
parent.
The rustc_span::hygiene crate contains all of the hygiene-related algorithms
(with the exception of some hacks in Resolver::resolve_crate_root)
and structures related to hygiene and expansion that are kept in global data.
The actual hierarchies are stored in HygieneData. This is a global
piece of data containing hygiene and expansion info that can be accessed from
any Ident without any context.
The Expansion Order Hierarchy
The first hierarchy tracks the order of expansions, i.e., when a macro invocation is in the output of another macro.
Here, the children in the hierarchy will be the "innermost" tokens. The
ExpnData struct itself contains a subset of properties from both macro
definition and macro call available through global data.
ExpnData::parent tracks the child-to-parent link in this hierarchy.
For example:
macro_rules! foo { () => { println!(); } }
fn main() { foo!(); }
In this code, the AST nodes that are finally generated would have hierarchy
root -> id(foo) -> id(println).
The Macro Definition Hierarchy
The second hierarchy tracks the order of macro definitions, i.e., when we are expanding one macro another macro definition is revealed in its output. This one is a bit tricky and more complex than the other two hierarchies.
SyntaxContext represents a whole chain in this hierarchy via an ID.
SyntaxContextData contains data associated with the given
SyntaxContext; mostly it is a cache for results of filtering that chain in
different ways. SyntaxContextData::parent is the child-to-parent
link here, and SyntaxContextData::outer_expns are individual
elements in the chain. The "chaining-operator" is
SyntaxContext::apply_mark in compiler code.
A Span, mentioned above, is actually just a compact representation of
a code location and SyntaxContext. Likewise, an Ident is just an interned
Symbol + Span (i.e. an interned string + hygiene data).
For built-in macros, we use the context:
SyntaxContext::empty().apply_mark(expn_id), and such macros are
considered to be defined at the hierarchy root. We do the same for proc macros because we haven't implemented cross-crate hygiene yet.
If the token had context X before being produced by a macro then after being
produced by the macro it has context X -> macro_id. Here are some examples:
Example 0:
macro m() { ident }
m!();
Here ident which initially has context SyntaxContext::root has
context ROOT -> id(m) after it's produced by m.
Example 1:
macro m() { macro n() { ident } }
m!();
n!();
In this example the ident has context ROOT initially, then ROOT -> id(m)
after the first expansion, then ROOT -> id(m) -> id(n).
Example 2:
Note that these chains are not entirely determined by their last element, in
other words ExpnId is not isomorphic to SyntaxContext.
macro m($i: ident) { macro n() { ($i, bar) } }
m!(foo);
After all expansions, foo has context ROOT -> id(n) and bar has context
ROOT -> id(m) -> id(n).
Currently this hierarchy for tracking macro definitions is subject to the so-called "context transplantation hack". Modern (i.e. experimental) macros have stronger hygiene than the legacy "Macros By Example" (MBE) system which can result in weird interactions between the two. The hack is intended to make things "just work" for now.
The Call-site Hierarchy
The third and final hierarchy tracks the location of macro invocations.
In this hierarchy ExpnData::call_site is the child -> parent
link.
Here is an example:
macro bar($i: ident) { $i }
macro foo($i: ident) { $i }
foo!(bar!(baz));
For the baz AST node in the final output, the expansion-order hierarchy is
ROOT -> id(foo) -> id(bar) -> baz, while the call-site hierarchy is ROOT -> baz.
Macro Backtraces
Macro backtraces are implemented in rustc_span using the hygiene machinery
in rustc_span::hygiene.
Producing Macro Output
Above, we saw how the output of a macro is integrated into the AST for a crate, and we also saw how the hygiene data for a crate is generated. But how do we actually produce the output of a macro? It depends on the type of macro.
There are two types of macros in Rust:
macro_rules!macros (a.k.a. "Macros By Example" (MBE)), and,- procedural macros (proc macros); including custom derives.
During the parsing phase, the normal Rust parser will set aside the contents of macros and their invocations. Later, macros are expanded using these portions of the code.
Some important data structures/interfaces here:
SyntaxExtension- a lowered macro representation, contains its expander function, which transforms aTokenStreamor AST into anotherTokenStreamor AST + some additional data like stability, or a list of unstable features allowed inside the macro.SyntaxExtensionKind- expander functions may have several different signatures (take one token stream, or two, or a piece of AST, etc). This is anenumthat lists them.BangProcMacro/TTMacroExpander/AttrProcMacro/MultiItemModifier-traits representing the expander function signatures.
Macros By Example
MBEs have their own parser distinct from the Rust parser. When macros are
expanded, we may invoke the MBE parser to parse and expand a macro. The
MBE parser, in turn, may call the Rust parser when it needs to bind a
metavariable (e.g. $my_expr) while parsing the contents of a macro
invocation. The code for macro expansion is in
compiler/rustc_expand/src/mbe/.
Example
macro_rules! printer {
(print $mvar:ident) => {
println!("{}", $mvar);
};
(print twice $mvar:ident) => {
println!("{}", $mvar);
println!("{}", $mvar);
};
}
Here $mvar is called a metavariable. Unlike normal variables, rather than
binding to a value at runtime, a metavariable binds at compile time to a
tree of tokens. A token is a single "unit" of the grammar, such as an
identifier (e.g. foo) or punctuation (e.g. =>). There are also other
special tokens, such as EOF, which its self indicates that there are no more
tokens. There are token trees resulting from the paired parentheses-like
characters ((...), [...], and {...}) – they include the open and
close and all the tokens in between (Rust requires that parentheses-like
characters be balanced). Having macro expansion operate on token streams
rather than the raw bytes of a source-file abstracts away a lot of complexity.
The macro expander (and much of the rest of the compiler) doesn't consider
the exact line and column of some syntactic construct in the code; it considers
which constructs are used in the code. Using tokens allows us to care about
what without worrying about where. For more information about tokens, see
the Parsing chapter of this book.
printer!(print foo); // `foo` is a variable
The process of expanding the macro invocation into the syntax tree
println!("{}", foo) and then expanding the syntax tree into a call to
Display::fmt is one common example of macro expansion.
The MBE parser
There are two parts to MBE expansion done by the macro parser:
- parsing the definition, and,
- parsing the invocations.
We think of the MBE parser as a nondeterministic finite automaton (NFA) based
regex parser since it uses an algorithm similar in spirit to the Earley
parsing algorithm. The macro
parser is defined in
compiler/rustc_expand/src/mbe/macro_parser.rs.
The interface of the macro parser is as follows (this is slightly simplified):
fn parse_tt(
&mut self,
parser: &mut Cow<'_, Parser<'_>>,
matcher: &[MatcherLoc]
) -> ParseResult
We use these items in macro parser:
- a
parservariable is a reference to the state of a normal Rust parser, including the token stream and parsing session. The token stream is what we are about to ask the MBE parser to parse. We will consume the raw stream of tokens and output a binding of metavariables to corresponding token trees. The parsing session can be used to report parser errors. - a
matchervariable is a sequence ofMatcherLocs that we want to match the token stream against. They're converted from token trees before matching.
In the analogy of a regex parser, the token stream is the input and we are
matching it against the pattern defined by matcher. Using our examples, the
token stream could be the stream of tokens containing the inside of the example
invocation print foo, while matcher might be the sequence of token (trees)
print $mvar:ident.
The output of the parser is a ParseResult, which indicates which of
three cases has occurred:
- Success: the token stream matches the given matcher and we have produced a binding from metavariables to the corresponding token trees.
- Failure: the token stream does not match matcher and results in an error message such as "No rule expected token ...".
- Error: some fatal error has occurred in the parser. For example, this happens if there is more than one pattern match, since that indicates the macro is ambiguous.
The full interface is defined here.
The macro parser does pretty much exactly the same as a normal regex parser
with one exception: in order to parse different types of metavariables, such as
ident, block, expr, etc., the macro parser must call back to the normal
Rust parser. Both the definition and invocation of macros are parsed using
the parser in a process which is non-intuitively self-referential.
The code to parse macro definitions is in
compiler/rustc_expand/src/mbe/macro_rules.rs. It defines the
pattern for matching a macro definition as $( $lhs:tt => $rhs:tt );+. In
other words, a macro_rules definition should have in its body at least one
occurrence of a token tree followed by => followed by another token tree.
When the compiler comes to a macro_rules definition, it uses this pattern to
match the two token trees per the rules of the definition of the macro, thereby
utilizing the macro parser itself. In our example definition, the
metavariable $lhs would match the patterns of both arms: (print $mvar:ident) and (print twice $mvar:ident). And $rhs would match the
bodies of both arms: { println!("{}", $mvar); } and { println!("{}", $mvar); println!("{}", $mvar); }. The parser keeps this knowledge around for when it
needs to expand a macro invocation.
When the compiler comes to a macro invocation, it parses that invocation using
a NFA-based macro parser described above. However, the matcher variable
used is the first token tree ($lhs) extracted from the arms of the macro
definition. Using our example, we would try to match the token stream print foo from the invocation against the matchers print $mvar:ident and print twice $mvar:ident that we previously extracted from the definition. The
algorithm is exactly the same, but when the macro parser comes to a place in the
current matcher where it needs to match a non-terminal (e.g. $mvar:ident),
it calls back to the normal Rust parser to get the contents of that
non-terminal. In this case, the Rust parser would look for an ident token,
which it finds (foo) and returns to the macro parser. Then, the macro parser
proceeds in parsing as normal. Also, note that exactly one of the matchers from
the various arms should match the invocation; if there is more than one match,
the parse is ambiguous, while if there are no matches at all, there is a syntax
error.
For more information about the macro parser's implementation, see the comments
in compiler/rustc_expand/src/mbe/macro_parser.rs.
Procedural Macros
Procedural macros are also expanded during parsing. However, rather than having a parser in the compiler, proc macros are implemented as custom, third-party crates. The compiler will compile the proc macro crate and specially annotated functions in them (i.e. the proc macro itself), passing them a stream of tokens. A proc macro can then transform the token stream and output a new token stream, which is synthesized into the AST.
The token stream type used by proc macros is stable, so rustc does not
use it internally. The compiler's (unstable) token stream is defined in
rustc_ast::tokenstream::TokenStream. This is converted into the
stable proc_macro::TokenStream and back in
rustc_expand::proc_macro and rustc_expand::proc_macro_server.
Since the Rust ABI is currently unstable, we use the C ABI for this conversion.
Custom Derive
Custom derives are a special type of proc macro.
Macros By Example and Macros 2.0
There is an legacy and mostly undocumented effort to improve the MBE system by giving it more hygiene-related features, better scoping and visibility rules, etc. Internally this uses the same machinery as today's MBEs with some additional syntactic sugar and are allowed to be in namespaces.
Name resolution
In the previous chapters, we saw how the Abstract Syntax Tree (AST)
is built with all macros expanded. We saw how doing that requires doing some
name resolution to resolve imports and macro names. In this chapter, we show
how this is actually done and more.
In fact, we don't do full name resolution during macro expansion -- we only
resolve imports and macros at that time. This is required to know what to even
expand. Later, after we have the whole AST, we do full name resolution to
resolve all names in the crate. This happens in rustc_resolve::late.
Unlike during macro expansion, in this late expansion, we only need to try to
resolve a name once, since no new names can be added. If we fail to resolve a
name, then it is a compiler error.
Name resolution is complex. There are different namespaces (e.g. macros, values, types, lifetimes), and names may be valid at different (nested) scopes. Also, different types of names can fail resolution differently, and failures can happen differently at different scopes. For example, in a module scope, failure means no unexpanded macros and no unresolved glob imports in that module. On the other hand, in a function body scope, failure requires that a name be absent from the block we are in, all outer scopes, and the global scope.
Basics
In our programs we refer to variables, types, functions, etc, by giving them a name. These names are not always unique. For example, take this valid Rust program:
#![allow(unused)] fn main() { type x = u32; let x: x = 1; let y: x = 2; }
How do we know on line 3 whether x is a type (u32) or a value (1)? These
conflicts are resolved during name resolution. In this specific case, name
resolution defines that type names and variable names live in separate
namespaces and therefore can co-exist.
The name resolution in Rust is a two-phase process. In the first phase, which runs
during macro expansion, we build a tree of modules and resolve imports. Macro
expansion and name resolution communicate with each other via the
ResolverAstLoweringExt trait.
The input to the second phase is the syntax tree, produced by parsing input
files and expanding macros. This phase produces links from all the names in the
source to relevant places where the name was introduced. It also generates
helpful error messages, like typo suggestions, traits to import or lints about
unused items.
A successful run of the second phase (Resolver::resolve_crate) creates kind
of an index the rest of the compilation may use to ask about the present names
(through the hir::lowering::Resolver interface).
The name resolution lives in the rustc_resolve crate, with the bulk in
lib.rs and some helpers or symbol-type specific logic in the other modules.
Namespaces
Different kind of symbols live in different namespaces ‒ e.g. types don't clash with variables. This usually doesn't happen, because variables start with lower-case letter while types with upper-case one, but this is only a convention. This is legal Rust code that will compile (with warnings):
#![allow(unused)] fn main() { type x = u32; let x: x = 1; let y: x = 2; // See? x is still a type here. }
To cope with this, and with slightly different scoping rules for these namespaces, the resolver keeps them separated and builds separate structures for them.
In other words, when the code talks about namespaces, it doesn't mean the module hierarchy, it's types vs. values vs. macros.
Scopes and ribs
A name is visible only in certain area in the source code. This forms a hierarchical structure, but not necessarily a simple one ‒ if one scope is part of another, it doesn't mean a name visible in the outer scope is also visible in the inner scope, or that it refers to the same thing.
To cope with that, the compiler introduces the concept of Ribs. This is
an abstraction of a scope. Every time the set of visible names potentially changes,
a new Rib is pushed onto a stack. The places where this can happen include for
example:
- The obvious places ‒ curly braces enclosing a block, function boundaries, modules.
- Introducing a
letbinding ‒ this can shadow another binding with the same name. - Macro expansion border ‒ to cope with macro hygiene.
When searching for a name, the stack of ribs is traversed from the innermost
outwards. This helps to find the closest meaning of the name (the one not
shadowed by anything else). The transition to outer Rib may also affect
what names are usable ‒ if there are nested functions (not closures),
the inner one can't access parameters and local bindings of the outer one,
even though they should be visible by ordinary scoping rules. An example:
#![allow(unused)] fn main() { fn do_something<T: Default>(val: T) { // <- New rib in both types and values (1) // `val` is accessible, as is the helper function // `T` is accessible let helper = || { // New rib on `helper` (2) and another on the block (3) // `val` is accessible here }; // End of (3) // `val` is accessible, `helper` variable shadows `helper` function fn helper() { // <- New rib in both types and values (4) // `val` is not accessible here, (4) is not transparent for locals // `T` is not accessible here } // End of (4) let val = T::default(); // New rib (5) // `val` is the variable, not the parameter here } // End of (5), (2) and (1) }
Because the rules for different namespaces are a bit different, each namespace
has its own independent Rib stack that is constructed in parallel to the others.
In addition, there's also a Rib stack for local labels (e.g. names of loops or
blocks), which isn't a full namespace in its own right.
Overall strategy
To perform the name resolution of the whole crate, the syntax tree is traversed
top-down and every encountered name is resolved. This works for most kinds of
names, because at the point of use of a name it is already introduced in the Rib
hierarchy.
There are some exceptions to this. Items are bit tricky, because they can be
used even before encountered ‒ therefore every block needs to be first scanned
for items to fill in its Rib.
Other, even more problematic ones, are imports which need recursive fixed-point resolution and macros, that need to be resolved and expanded before the rest of the code can be processed.
Therefore, the resolution is performed in multiple stages.
Speculative crate loading
To give useful errors, rustc suggests importing paths into scope if they're not found. How does it do this? It looks through every module of every crate and looks for possible matches. This even includes crates that haven't yet been loaded!
Eagerly loading crates to include import suggestions that haven't yet been
loaded is called speculative crate loading, because any errors it encounters
shouldn't be reported: rustc_resolve decided to load them, not the user. The function
that does this is lookup_import_candidates and lives in
rustc_resolve::diagnostics.
To tell the difference between speculative loads and loads initiated by the
user, rustc_resolve passes around a record_used parameter, which is false when
the load is speculative.
TODO: #16
This is a result of the first pass of learning the code. It is definitely incomplete and not detailed enough. It also might be inaccurate in places. Still, it probably provides useful first guidepost to what happens in there.
- What exactly does it link to and how is that published and consumed by following stages of compilation?
- Who calls it and how it is actually used.
- Is it a pass and then the result is only used, or can it be computed incrementally?
- The overall strategy description is a bit vague.
- Where does the name
Ribcome from? - Does this thing have its own tests, or is it tested only as part of some e2e testing?
Attributes
Attributes come in two types: inert (or built-in) and active (non-builtin).
Builtin/inert attributes
These attributes are defined in the compiler itself, in
compiler/rustc_feature/src/builtin_attrs.rs.
Examples include #[allow] and #[macro_use].
These attributes have several important characteristics:
- They are always in scope, and do not participate in typical path-based resolution.
- They cannot be renamed. For example,
use allow as foowill compile, but writing#[foo]will produce an error. - They are 'inert', meaning they are left as-is by the macro expansion code.
As a result, any behavior comes as a result of the compiler explicitly checking for their presence.
For example, lint-related code explicitly checks for
#[allow],#[warn],#[deny], and#[forbid], rather than the behavior coming from the expansion of the attributes themselves.
'Non-builtin'/'active' attributes
These attributes are defined by a crate - either the standard library, or a proc-macro crate.
Important: Many non-builtin attributes, such as #[derive], are still considered part of the
core Rust language. However, they are not called 'builtin attributes', since they have a
corresponding definition in the standard library.
Definitions of non-builtin attributes take two forms:
- Proc-macro attributes, defined via a function annotated with
#[proc_macro_attribute]in a proc-macro crate. - AST-based attributes, defined in the standard library. These attributes have special 'stub'
macros defined in places like
library/core/src/macros/mod.rs.
These definitions exist to allow the macros to participate in typical path-based resolution - they
can be imported, re-exported, and renamed just like any other item definition. However, the body of
the definition is empty. Instead, the macro is annotated with the #[rustc_builtin_macro]
attribute, which tells the compiler to run a corresponding function in rustc_builtin_macros.
All non-builtin attributes have the following characteristics:
- Like all other definitions (e.g. structs), they must be brought into scope via an import.
Many standard library attributes are included in the prelude - this is why writing
#[derive]works without an import. - They participate in macro expansion. The implementation of the macro may leave the attribute target unchanged, modify the target, produce new AST nodes, or remove the target entirely.
The #[test] attribute
- Step 1: Re-Exporting
- Step 2: Harness Generation
- Step 3: Test Object Generation
- Inspecting the generated code
Many Rust programmers rely on a built-in attribute called #[test]. All
you have to do is mark a function and include some asserts like so:
#[test]
fn my_test() {
assert!(2+2 == 4);
}
When this program is compiled using rustc --test or cargo test, it will
produce an executable that can run this, and any other test function. This
method of testing allows tests to live alongside code in an organic way. You
can even put tests inside private modules:
mod my_priv_mod {
fn my_priv_func() -> bool {}
#[test]
fn test_priv_func() {
assert!(my_priv_func());
}
}
Private items can thus be easily tested without worrying about how to expose
them to any sort of external testing apparatus. This is key to the
ergonomics of testing in Rust. Semantically, however, it's rather odd.
How does any sort of main function invoke these tests if they're not visible?
What exactly is rustc --test doing?
#[test] is implemented as a syntactic transformation inside the compiler's
rustc_ast. Essentially, it's a fancy macro that
rewrites the crate in 3 steps:
Step 1: Re-Exporting
As mentioned earlier, tests can exist inside private modules, so we need a
way of exposing them to the main function, without breaking any existing
code. To that end, rustc_ast will create local modules called
__test_reexports that recursively reexport tests. This expansion translates
the above example into:
mod my_priv_mod {
fn my_priv_func() -> bool {}
pub fn test_priv_func() {
assert!(my_priv_func());
}
pub mod __test_reexports {
pub use super::test_priv_func;
}
}
Now, our test can be accessed as
my_priv_mod::__test_reexports::test_priv_func. For deeper module
structures, __test_reexports will reexport modules that contain tests, so a
test at a::b::my_test becomes
a::__test_reexports::b::__test_reexports::my_test. While this process seems
pretty safe, what happens if there is an existing __test_reexports module?
The answer: nothing.
To explain, we need to understand how Rust's Abstract Syntax Tree
represents identifiers. The name of every function, variable, module,
etc. is not stored as a string, but rather as an opaque Symbol which
is essentially an ID number for each identifier. The compiler keeps a separate
hashtable that allows us to recover the human-readable name of a Symbol when
necessary (such as when printing a syntax error). When the compiler generates
the __test_reexports module, it generates a new Symbol for the
identifier, so while the compiler-generated __test_reexports may share a name
with your hand-written one, it will not share a Symbol. This
technique prevents name collision during code generation and is the foundation
of Rust's macro hygiene.
Step 2: Harness Generation
Now that our tests are accessible from the root of our crate, we need to do
something with them using rustc_ast generates a module like so:
#[main]
pub fn main() {
extern crate test;
test::test_main_static(&[&path::to::test1, /*...*/]);
}
Here path::to::test1 is a constant of type test::TestDescAndFn.
While this transformation is simple, it gives us a lot of insight into how
tests are actually run. The tests are aggregated into an array and passed to
a test runner called test_main_static. We'll come back to exactly what
TestDescAndFn is, but for now, the key takeaway is that there is a crate
called test that is part of Rust core, that implements all of the
runtime for testing. test's interface is unstable, so the only stable way
to interact with it is through the #[test] macro.
Step 3: Test Object Generation
If you've written tests in Rust before, you may be familiar with some of the
optional attributes available on test functions. For example, a test can be
annotated with #[should_panic] if we expect the test to cause a panic. It
looks something like this:
#[test]
#[should_panic]
fn foo() {
panic!("intentional");
}
This means our tests are more than just simple functions, they have
configuration information as well. test encodes this configuration data into
a struct called TestDesc. For each test function in a crate,
rustc_ast will parse its attributes and generate a TestDesc
instance. It then combines the TestDesc and test function into the
predictably named TestDescAndFn struct, that test_main_static
operates on.
For a given test, the generated TestDescAndFn instance looks like so:
self::test::TestDescAndFn{
desc: self::test::TestDesc{
name: self::test::StaticTestName("foo"),
ignore: false,
should_panic: self::test::ShouldPanic::Yes,
allow_fail: false,
},
testfn: self::test::StaticTestFn(||
self::test::assert_test_result(::crate::__test_reexports::foo())),
}
Once we've constructed an array of these test objects, they're passed to the test runner via the harness generated in Step 2.
Inspecting the generated code
On nightly rustc, there's an unstable flag called unpretty that you can use
to print out the module source after macro expansion:
$ rustc my_mod.rs -Z unpretty=hir
Panicking in rust
Step 1: Invocation of the panic! macro.
There are actually two panic macros - one defined in core, and one defined in std.
This is due to the fact that code in core can panic. core is built before std,
but we want panics to use the same machinery at runtime, whether they originate in core
or std.
core definition of panic!
The core panic! macro eventually makes the following call (in library/core/src/panicking.rs):
#![allow(unused)] fn main() { // NOTE This function never crosses the FFI boundary; it's a Rust-to-Rust call extern "Rust" { #[lang = "panic_impl"] fn panic_impl(pi: &PanicInfo<'_>) -> !; } let pi = PanicInfo::internal_constructor(Some(&fmt), location); unsafe { panic_impl(&pi) } }
Actually resolving this goes through several layers of indirection:
-
In
compiler/rustc_middle/src/middle/weak_lang_items.rs,panic_implis declared as 'weak lang item', with the symbolrust_begin_unwind. This is used inrustc_hir_analysis/src/collect.rsto set the actual symbol name torust_begin_unwind.Note that
panic_implis declared in anextern "Rust"block, which means that core will attempt to call a foreign symbol calledrust_begin_unwind(to be resolved at link time) -
In
library/std/src/panicking.rs, we have this definition:
#![allow(unused)] fn main() { /// Entry point of panic from the core crate. #[cfg(not(test))] #[panic_handler] #[unwind(allowed)] pub fn begin_panic_handler(info: &PanicInfo<'_>) -> ! { ... } }
The special panic_handler attribute is resolved via compiler/rustc_middle/src/middle/lang_items.
The extract function converts the panic_handler attribute to a panic_impl lang item.
Now, we have a matching panic_handler lang item in the std. This function goes
through the same process as the extern { fn panic_impl } definition in core, ending
up with a symbol name of rust_begin_unwind. At link time, the symbol reference in core
will be resolved to the definition of std (the function called begin_panic_handler in the
Rust source).
Thus, control flow will pass from core to std at runtime. This allows panics from core
to go through the same infrastructure that other panics use (panic hooks, unwinding, etc)
std implementation of panic!
This is where the actual panic-related logic begins. In library/std/src/panicking.rs,
control passes to rust_panic_with_hook. This method is responsible
for invoking the global panic hook, and checking for double panics. Finally,
we call __rust_start_panic, which is provided by the panic runtime.
The call to __rust_start_panic is very weird - it is passed a *mut &mut dyn PanicPayload,
converted to an usize. Let's break this type down:
-
PanicPayloadis an internal trait. It is implemented forPanicPayload(a wrapper around the user-supplied payload type), and has a methodfn take_box(&mut self) -> *mut (dyn Any + Send). This method takes the user-provided payload (T: Any + Send), boxes it, and converts the box to a raw pointer. -
When we call
__rust_start_panic, we have an&mut dyn PanicPayload. However, this is a fat pointer (twice the size of ausize). To pass this to the panic runtime across an FFI boundary, we take a mutable reference to this mutable reference (&mut &mut dyn PanicPayload), and convert it to a raw pointer (*mut &mut dyn PanicPayload). The outer raw pointer is a thin pointer, since it points to aSizedtype (a mutable reference). Therefore, we can convert this thin pointer into ausize, which is suitable for passing across an FFI boundary.
Finally, we call __rust_start_panic with this usize. We have now entered the panic runtime.
Step 2: The panic runtime
Rust provides two panic runtimes: panic_abort and panic_unwind. The user chooses
between them at build time via their Cargo.toml
panic_abort is extremely simple: its implementation of __rust_start_panic just aborts,
as you would expect.
panic_unwind is the more interesting case.
In its implementation of __rust_start_panic, we take the usize, convert
it back to a *mut &mut dyn PanicPayload, dereference it, and call take_box
on the &mut dyn PanicPayload. At this point, we have a raw pointer to the payload
itself (a *mut (dyn Send + Any)): that is, a raw pointer to the actual value
provided by the user who called panic!.
At this point, the platform-independent code ends. We now call into
platform-specific unwinding logic (e.g unwind). This code is
responsible for unwinding the stack, running any 'landing pads' associated
with each frame (currently, running destructors), and transferring control
to the catch_unwind frame.
Note that all panics either abort the process or get caught by some call to catch_unwind.
In particular, in std's runtime service,
the call to the user-provided main function is wrapped in catch_unwind.
AST Validation
AST validation is a separate AST pass that visits each item in the tree and performs simple checks. This pass doesn't perform any complex analysis, type checking or name resolution.
Before performing any validation, the compiler first expands the macros. Then this pass performs validations to check that each AST item is in the correct state. And when this pass is done, the compiler runs the crate resolution pass.
Validations
Validations are defined in AstValidator type, which
itself is located in rustc_ast_passes crate. This
type implements various simple checks which emit errors
when certain language rules are broken.
In addition, AstValidator implements Visitor trait
that defines how to visit AST items (which can be functions,
traits, enums, etc).
For each item, visitor performs specific checks. For
example, when visiting a function declaration,
AstValidator checks that the function has:
- no more than
u16::MAXparameters; - c-variadic argument goes the last in the declaration;
- documentation comments aren't applied to function parameters;
- and other validations.
Feature Gate Checking
TODO: this chapter #1158
Lang items
The compiler has certain pluggable operations; that is, functionality that isn't hard-coded into
the language, but is implemented in libraries, with a special marker to tell the compiler it
exists. The marker is the attribute #[lang = "..."], and there are various different values of
..., i.e. various different 'lang items'.
Many such lang items can be implemented only in one sensible way, such as add (trait core::ops::Add) or future_trait (trait core::future::Future). Others can be overridden to
achieve some specific goals; for example, you can control your binary's entrypoint.
Features provided by lang items include:
- overloadable operators via traits: the traits corresponding to the
==,<, dereference (*),+, etc. operators are all marked with lang items; those specific four areeq,ord,deref, andaddrespectively. - panicking and stack unwinding; the
eh_personality,panicandpanic_bounds_checkslang items. - the traits in
std::markerused to indicate properties of types used by the compiler; lang itemssend,syncandcopy. - the special marker types used for variance indicators found in
core::marker; lang itemphantom_data.
Lang items are loaded lazily by the compiler; e.g. if one never uses Box
then there is no need to define functions for exchange_malloc and
box_free. rustc will emit an error when an item is needed but not found
in the current crate or any that it depends on.
Most lang items are defined by the core library, but if you're trying to build an
executable with #![no_std], you'll still need to define a few lang items that are
usually provided by std.
Retrieving a language item
You can retrieve lang items by calling tcx.lang_items().
Here's a small example of retrieving the trait Sized {} language item:
#![allow(unused)] fn main() { // Note that in case of `#![no_core]`, the trait is not available. if let Some(sized_trait_def_id) = tcx.lang_items().sized_trait() { // do something with `sized_trait_def_id` } }
Note that sized_trait() returns an Option, not the DefId itself.
That's because language items are defined in the standard library, so if someone compiles with
#![no_core] (or for some lang items, #![no_std]), the lang item may not be present.
You can either:
- Give a hard error if the lang item is necessary to continue (don't panic, since this can happen in user code).
- Proceed with limited functionality, by just omitting whatever you were going to do with the
DefId.
List of all language items
You can find language items in the following places:
- An exhaustive reference in the compiler documentation:
rustc_hir::LangItem - An auto-generated list with source locations by using ripgrep:
rg '#\[.*lang =' library/
Note that language items are explicitly unstable and may change in any new release.
The HIR
The HIR – "High-Level Intermediate Representation" – is the primary IR used
in most of rustc. It is a compiler-friendly representation of the abstract
syntax tree (AST) that is generated after parsing, macro expansion, and name
resolution (see Lowering for how the HIR is created).
Many parts of HIR resemble Rust surface syntax quite closely, with
the exception that some of Rust's expression forms have been desugared away.
For example, for loops are converted into a loop and do not appear in
the HIR. This makes HIR more amenable to analysis than a normal AST.
This chapter covers the main concepts of the HIR.
You can view the HIR representation of your code by passing the
-Z unpretty=hir-tree flag to rustc:
cargo rustc -- -Z unpretty=hir-tree
You can also use the -Z unpretty=hir option to generate a HIR
that is closer to the original source code expression:
cargo rustc -- -Z unpretty=hir
Out-of-band storage and the Crate type
The top-level data-structure in the HIR is the Crate, which stores
the contents of the crate currently being compiled (we only ever
construct HIR for the current crate). Whereas in the AST the crate
data structure basically just contains the root module, the HIR
Crate structure contains a number of maps and other things that
serve to organize the content of the crate for easier access.
For example, the contents of individual items (e.g. modules,
functions, traits, impls, etc) in the HIR are not immediately
accessible in the parents. So, for example, if there is a module item
foo containing a function bar():
#![allow(unused)] fn main() { mod foo { fn bar() { } } }
then in the HIR the representation of module foo (the Mod
struct) would only have the ItemId I of bar(). To get the
details of the function bar(), we would lookup I in the
items map.
One nice result from this representation is that one can iterate over all items in the crate by iterating over the key-value pairs in these maps (without the need to trawl through the whole HIR). There are similar maps for things like trait items and impl items, as well as "bodies" (explained below).
The other reason to set up the representation this way is for better
integration with incremental compilation. This way, if you gain access
to an &rustc_hir::Item (e.g. for the mod foo), you do not immediately
gain access to the contents of the function bar(). Instead, you only
gain access to the id for bar(), and you must invoke some
function to lookup the contents of bar() given its id; this gives
the compiler a chance to observe that you accessed the data for
bar(), and then record the dependency.
Identifiers in the HIR
There are a bunch of different identifiers to refer to other nodes or definitions in the HIR. In short:
- A
DefIdrefers to a definition in any crate. - A
LocalDefIdrefers to a definition in the currently compiled crate. - A
HirIdrefers to any node in the HIR.
For more detailed information, check out the chapter on identifiers.
The HIR Map
Most of the time when you are working with the HIR, you will do so via
the HIR Map, accessible in the tcx via tcx.hir() (and defined in
the hir::map module). The HIR map contains a number of methods to
convert between IDs of various kinds and to lookup data associated
with a HIR node.
For example, if you have a LocalDefId, and you would like to convert it
to a HirId, you can use tcx.hir().local_def_id_to_hir_id(def_id).
You need a LocalDefId, rather than a DefId, since only local items have HIR nodes.
Similarly, you can use tcx.hir().find(n) to lookup the node for a
HirId. This returns a Option<Node<'hir>>, where Node is an enum
defined in the map. By matching on this, you can find out what sort of
node the HirId referred to and also get a pointer to the data
itself. Often, you know what sort of node n is – e.g. if you know
that n must be some HIR expression, you can do
tcx.hir().expect_expr(n), which will extract and return the
&hir::Expr, panicking if n is not in fact an expression.
Finally, you can use the HIR map to find the parents of nodes, via
calls like tcx.hir().get_parent(n).
HIR Bodies
A rustc_hir::Body represents some kind of executable code, such as the body
of a function/closure or the definition of a constant. Bodies are
associated with an owner, which is typically some kind of item
(e.g. an fn() or const), but could also be a closure expression
(e.g. |x, y| x + y). You can use the HIR map to find the body
associated with a given def-id (maybe_body_owned_by) or to find
the owner of a body (body_owner_def_id).
AST lowering
The AST lowering step converts AST to HIR. This means many structures are removed if they are irrelevant for type analysis or similar syntax agnostic analyses. Examples of such structures include but are not limited to
- Parenthesis
- Removed without replacement, the tree structure makes order explicit
forloops andwhile (let)loops- Converted to
loop+matchand someletbindings
- Converted to
if let- Converted to
match
- Converted to
- Universal
impl Trait- Converted to generic arguments (but with some flags, to know that the user didn't write them)
- Existential
impl Trait- Converted to a virtual
existential typedeclaration
- Converted to a virtual
Lowering needs to uphold several invariants in order to not trigger the
sanity checks in compiler/rustc_passes/src/hir_id_validator.rs:
- A
HirIdmust be used if created. So if you use thelower_node_id, you must use the resultingNodeIdorHirId(either is fine, since anyNodeIds in theHIRare checked for existingHirIds) - Lowering a
HirIdmust be done in the scope of the owning item. This means you need to usewith_hir_id_ownerif you are creating parts of an item other than the one being currently lowered. This happens for example during the lowering of existentialimpl Trait - A
NodeIdthat will be placed into a HIR structure must be lowered, even if itsHirIdis unused. Callinglet _ = self.lower_node_id(node_id);is perfectly legitimate. - If you are creating new nodes that didn't exist in the
AST, you must create new ids for them. This is done by calling thenext_idmethod, which produces both a newNodeIdas well as automatically lowering it for you so you also get theHirId.
If you are creating new DefIds, since each DefId needs to have a
corresponding NodeId, it is advisable to add these NodeIds to the
AST so you don't have to generate new ones during lowering. This has
the advantage of creating a way to find the DefId of something via its
NodeId. If lowering needs this DefId in multiple places, you can't
generate a new NodeId in all those places because you'd also get a new
DefId then. With a NodeId from the AST this is not an issue.
Having the NodeId also allows the DefCollector to generate the DefIds
instead of lowering having to do it on the fly. Centralizing the DefId
generation in one place makes it easier to refactor and reason about.
HIR Debugging
Use the -Z unpretty=hir flag to produce a human-readable representation of the HIR.
For cargo projects this can be done with cargo rustc -- -Z unpretty=hir.
This output is useful when you need to see at a glance how your code was desugared and transformed
during AST lowering.
For a full Debug dump of the data in the HIR, use the -Z unpretty=hir-tree flag.
This may be useful when you need to see the full structure of the HIR from the perspective of the
compiler.
If you are trying to correlate NodeIds or DefIds with source code, the
-Z unpretty=expanded,identified flag may be useful.
TODO: anything else? #1159
The THIR
The THIR ("Typed High-Level Intermediate Representation"), previously called HAIR for "High-Level Abstract IR", is another IR used by rustc that is generated after type checking. It is (as of January 2024) used for MIR construction, exhaustiveness checking, and unsafety checking.
As the name might suggest, the THIR is a lowered version of the HIR where all the types have been filled in, which is possible after type checking has completed. But it has some other interesting features that distinguish it from the HIR:
-
Like the MIR, the THIR only represents bodies, i.e. "executable code"; this includes function bodies, but also
constinitializers, for example. Specifically, all body owners have THIR created. Consequently, the THIR has no representation for items likestructs ortraits. -
Each body of THIR is only stored temporarily and is dropped as soon as it's no longer needed, as opposed to being stored until the end of the compilation process (which is what is done with the HIR).
-
Besides making the types of all nodes available, the THIR also has additional desugaring compared to the HIR. For example, automatic references and dereferences are made explicit, and method calls and overloaded operators are converted into plain function calls. Destruction scopes are also made explicit.
-
Statements, expressions, and match arms are stored separately. For example, statements in the
stmtsarray reference expressions by their index (represented as aExprId) in theexprsarray.
The THIR lives in rustc_mir_build::thir. To construct a thir::Expr,
you can use the thir_body function, passing in the memory arena where the THIR
will be allocated. Dropping this arena will result in the THIR being destroyed,
which is useful to keep peak memory in check. Having a THIR representation of
all bodies of a crate in memory at the same time would be very heavy.
You can get a debug representation of the THIR by passing the -Zunpretty=thir-tree flag
to rustc.
To demonstrate, let's use the following example:
fn main() { let x = 1 + 2; }
Here is how that gets represented in THIR (as of Aug 2022):
#![allow(unused)] fn main() { Thir { // no match arms arms: [], exprs: [ // expression 0, a literal with a value of 1 Expr { ty: i32, temp_lifetime: Some( Node(1), ), span: oneplustwo.rs:2:13: 2:14 (#0), kind: Literal { lit: Spanned { node: Int( 1, Unsuffixed, ), span: oneplustwo.rs:2:13: 2:14 (#0), }, neg: false, }, }, // expression 1, scope surrounding literal 1 Expr { ty: i32, temp_lifetime: Some( Node(1), ), span: oneplustwo.rs:2:13: 2:14 (#0), kind: Scope { // reference to expression 0 above region_scope: Node(3), lint_level: Explicit( HirId { owner: DefId(0:3 ~ oneplustwo[6932]::main), local_id: 3, }, ), value: e0, }, }, // expression 2, literal 2 Expr { ty: i32, temp_lifetime: Some( Node(1), ), span: oneplustwo.rs:2:17: 2:18 (#0), kind: Literal { lit: Spanned { node: Int( 2, Unsuffixed, ), span: oneplustwo.rs:2:17: 2:18 (#0), }, neg: false, }, }, // expression 3, scope surrounding literal 2 Expr { ty: i32, temp_lifetime: Some( Node(1), ), span: oneplustwo.rs:2:17: 2:18 (#0), kind: Scope { region_scope: Node(4), lint_level: Explicit( HirId { owner: DefId(0:3 ~ oneplustwo[6932]::main), local_id: 4, }, ), // reference to expression 2 above value: e2, }, }, // expression 4, represents 1 + 2 Expr { ty: i32, temp_lifetime: Some( Node(1), ), span: oneplustwo.rs:2:13: 2:18 (#0), kind: Binary { op: Add, // references to scopes surrounding literals above lhs: e1, rhs: e3, }, }, // expression 5, scope surrounding expression 4 Expr { ty: i32, temp_lifetime: Some( Node(1), ), span: oneplustwo.rs:2:13: 2:18 (#0), kind: Scope { region_scope: Node(5), lint_level: Explicit( HirId { owner: DefId(0:3 ~ oneplustwo[6932]::main), local_id: 5, }, ), value: e4, }, }, // expression 6, block around statement Expr { ty: (), temp_lifetime: Some( Node(9), ), span: oneplustwo.rs:1:11: 3:2 (#0), kind: Block { body: Block { targeted_by_break: false, region_scope: Node(8), opt_destruction_scope: None, span: oneplustwo.rs:1:11: 3:2 (#0), // reference to statement 0 below stmts: [ s0, ], expr: None, safety_mode: Safe, }, }, }, // expression 7, scope around block in expression 6 Expr { ty: (), temp_lifetime: Some( Node(9), ), span: oneplustwo.rs:1:11: 3:2 (#0), kind: Scope { region_scope: Node(9), lint_level: Explicit( HirId { owner: DefId(0:3 ~ oneplustwo[6932]::main), local_id: 9, }, ), value: e6, }, }, // destruction scope around expression 7 Expr { ty: (), temp_lifetime: Some( Node(9), ), span: oneplustwo.rs:1:11: 3:2 (#0), kind: Scope { region_scope: Destruction(9), lint_level: Inherited, value: e7, }, }, ], stmts: [ // let statement Stmt { kind: Let { remainder_scope: Remainder { block: 8, first_statement_index: 0}, init_scope: Node(1), pattern: Pat { ty: i32, span: oneplustwo.rs:2:9: 2:10 (#0), kind: Binding { mutability: Not, name: "x", mode: ByValue, var: LocalVarId( HirId { owner: DefId(0:3 ~ oneplustwo[6932]::main), local_id: 7, }, ), ty: i32, subpattern: None, is_primary: true, }, }, initializer: Some( e5, ), else_block: None, lint_level: Explicit( HirId { owner: DefId(0:3 ~ oneplustwo[6932]::main), local_id: 6, }, ), }, opt_destruction_scope: Some( Destruction(1), ), }, ], } }
The MIR (Mid-level IR)
MIR is Rust's Mid-level Intermediate Representation. It is constructed from HIR. MIR was introduced in RFC 1211. It is a radically simplified form of Rust that is used for certain flow-sensitive safety checks – notably the borrow checker! – and also for optimization and code generation.
If you'd like a very high-level introduction to MIR, as well as some of the compiler concepts that it relies on (such as control-flow graphs and desugaring), you may enjoy the rust-lang blog post that introduced MIR.
Introduction to MIR
MIR is defined in the compiler/rustc_middle/src/mir/ module, but much of the code
that manipulates it is found in compiler/rustc_mir_build,
compiler/rustc_mir_transform, and
compiler/rustc_mir_dataflow.
Some of the key characteristics of MIR are:
- It is based on a control-flow graph.
- It does not have nested expressions.
- All types in MIR are fully explicit.
Key MIR vocabulary
This section introduces the key concepts of MIR, summarized here:
- Basic blocks: units of the control-flow graph, consisting of:
- statements: actions with one successor
- terminators: actions with potentially multiple successors; always at the end of a block
- (if you're not familiar with the term basic block, see the background chapter)
- Locals: Memory locations allocated on the stack (conceptually, at
least), such as function arguments, local variables, and
temporaries. These are identified by an index, written with a
leading underscore, like
_1. There is also a special "local" (_0) allocated to store the return value. - Places: expressions that identify a location in memory, like
_1or_1.f. - Rvalues: expressions that produce a value. The "R" stands for
the fact that these are the "right-hand side" of an assignment.
- Operands: the arguments to an rvalue, which can either be a
constant (like
22) or a place (like_1).
- Operands: the arguments to an rvalue, which can either be a
constant (like
You can get a feeling for how MIR is constructed by translating simple programs into MIR and reading the pretty printed output. In fact, the playground makes this easy, since it supplies a MIR button that will show you the MIR for your program. Try putting this program into play (or clicking on this link), and then clicking the "MIR" button on the top:
fn main() { let mut vec = Vec::new(); vec.push(1); vec.push(2); }
You should see something like:
// WARNING: This output format is intended for human consumers only
// and is subject to change without notice. Knock yourself out.
fn main() -> () {
...
}
This is the MIR format for the main function.
MIR shown by above link is optimized.
Some statements like StorageLive are removed in optimization.
This happens because the compiler notices the value is never accessed in the code.
We can use rustc [filename].rs -Z mir-opt-level=0 --emit mir to view unoptimized MIR.
This requires the nightly toolchain.
Variable declarations. If we drill in a bit, we'll see it begins with a bunch of variable declarations. They look like this:
let mut _0: (); // return place
let mut _1: std::vec::Vec<i32>; // in scope 0 at src/main.rs:2:9: 2:16
let mut _2: ();
let mut _3: &mut std::vec::Vec<i32>;
let mut _4: ();
let mut _5: &mut std::vec::Vec<i32>;
You can see that variables in MIR don't have names, they have indices,
like _0 or _1. We also intermingle the user's variables (e.g.,
_1) with temporary values (e.g., _2 or _3). You can tell apart
user-defined variables because they have debuginfo associated to them (see below).
User variable debuginfo. Below the variable declarations, we find the only
hint that _1 represents a user variable:
scope 1 {
debug vec => _1; // in scope 1 at src/main.rs:2:9: 2:16
}
Each debug <Name> => <Place>; annotation describes a named user variable,
and where (i.e. the place) a debugger can find the data of that variable.
Here the mapping is trivial, but optimizations may complicate the place,
or lead to multiple user variables sharing the same place.
Additionally, closure captures are described using the same system, and so
they're complicated even without optimizations, e.g.: debug x => (*((*_1).0: &T));.
The "scope" blocks (e.g., scope 1 { .. }) describe the lexical structure of
the source program (which names were in scope when), so any part of the program
annotated with // in scope 0 would be missing vec, if you were stepping
through the code in a debugger, for example.
Basic blocks. Reading further, we see our first basic block (naturally it may look slightly different when you view it, and I am ignoring some of the comments):
bb0: {
StorageLive(_1);
_1 = const <std::vec::Vec<T>>::new() -> bb2;
}
A basic block is defined by a series of statements and a final terminator. In this case, there is one statement:
StorageLive(_1);
This statement indicates that the variable _1 is "live", meaning
that it may be used later – this will persist until we encounter a
StorageDead(_1) statement, which indicates that the variable _1 is
done being used. These "storage statements" are used by LLVM to
allocate stack space.
The terminator of the block bb0 is the call to Vec::new:
_1 = const <std::vec::Vec<T>>::new() -> bb2;
Terminators are different from statements because they can have more
than one successor – that is, control may flow to different
places. Function calls like the call to Vec::new are always
terminators because of the possibility of unwinding, although in the
case of Vec::new we are able to see that indeed unwinding is not
possible, and hence we list only one successor block, bb2.
If we look ahead to bb2, we will see it looks like this:
bb2: {
StorageLive(_3);
_3 = &mut _1;
_2 = const <std::vec::Vec<T>>::push(move _3, const 1i32) -> [return: bb3, unwind: bb4];
}
Here there are two statements: another StorageLive, introducing the _3
temporary, and then an assignment:
_3 = &mut _1;
Assignments in general have the form:
<Place> = <Rvalue>
A place is an expression like _3, _3.f or *_3 – it denotes a
location in memory. An Rvalue is an expression that creates a
value: in this case, the rvalue is a mutable borrow expression, which
looks like &mut <Place>. So we can kind of define a grammar for
rvalues like so:
<Rvalue> = & (mut)? <Place>
| <Operand> + <Operand>
| <Operand> - <Operand>
| ...
<Operand> = Constant
| copy Place
| move Place
As you can see from this grammar, rvalues cannot be nested – they can
only reference places and constants. Moreover, when you use a place,
we indicate whether we are copying it (which requires that the
place have a type T where T: Copy) or moving it (which works
for a place of any type). So, for example, if we had the expression x = a + b + c in Rust, that would get compiled to two statements and a
temporary:
TMP1 = a + b
x = TMP1 + c
(Try it and see, though you may want to do release mode to skip over the overflow checks.)
MIR data types
The MIR data types are defined in the compiler/rustc_middle/src/mir/
module. Each of the key concepts mentioned in the previous section
maps in a fairly straightforward way to a Rust type.
The main MIR data type is Body. It contains the data for a single
function (along with sub-instances of Mir for "promoted constants",
but you can read about those below).
- Basic blocks: The basic blocks are stored in the field
Body::basic_blocks; this is a vector ofBasicBlockDatastructures. Nobody ever references a basic block directly: instead, we pass aroundBasicBlockvalues, which are newtype'd indices into this vector. - Statements are represented by the type
Statement. - Terminators are represented by the
Terminator. - Locals are represented by a newtype'd index type
Local. The data for a local variable is found in theBody::local_declsvector. There is also a special constantRETURN_PLACEidentifying the special "local" representing the return value. - Places are identified by the struct
Place. There are a few fields:- Local variables like
_1 - Projections, which are fields or other things that "project
out" from a base place. These are represented by the newtype'd type
ProjectionElem. So e.g. the place_1.fis a projection, withfbeing the "projection element" and_1being the base path.*_1is also a projection, with the*being represented by theProjectionElem::Derefelement.
- Local variables like
- Rvalues are represented by the enum
Rvalue. - Operands are represented by the enum
Operand.
Representing constants
When code has reached the MIR stage, constants can generally come in two forms:
MIR constants (mir::Constant) and type system constants (ty::Const).
MIR constants are used as operands: in x + CONST, CONST is a MIR constant;
similarly, in x + 2, 2 is a MIR constant. Type system constants are used in
the type system, in particular for array lengths but also for const generics.
Generally, both kinds of constants can be "unevaluated" or "already evaluated".
And unevaluated constant simply stores the DefId of what needs to be evaluated
to compute this result. An evaluated constant (a "value") has already been
computed; their representation differs between type system constants and MIR
constants: MIR constants evaluate to a mir::ConstValue; type system constants
evaluate to a ty::ValTree.
Type system constants have some more variants to support const generics: they
can refer to local const generic parameters, and they are subject to inference.
Furthermore, the mir::Constant::Ty variant lets us use an arbitrary type
system constant as a MIR constant; this happens whenever a const generic
parameter is used as an operand.
MIR constant values
In general, a MIR constant value (mir::ConstValue) was computed by evaluating
some constant the user wrote. This const evaluation produces
a very low-level representation of the result in terms of individual bytes. We
call this an "indirect" constant (mir::ConstValue::Indirect) since the value
is stored in-memory.
However, storing everything in-memory would be awfully inefficient. Hence there
are some other variants in mir::ConstValue that can represent certain simple
and common values more efficiently. In particular, everything that can be
directly written as a literal in Rust (integers, floats, chars, bools, but also
"string literals" and b"byte string literals") has an optimized variant that
avoids the full overhead of the in-memory representation.
ValTrees
An evaluated type system constant is a "valtree". The ty::ValTree datastructure
allows us to represent
- arrays,
- many structs,
- tuples,
- enums and,
- most primitives.
The most important rule for
this representation is that every value must be uniquely represented. In other
words: a specific value must only be representable in one specific way. For example: there is only
one way to represent an array of two integers as a ValTree:
ValTree::Branch(&[ValTree::Leaf(first_int), ValTree::Leaf(second_int)]).
Even though theoretically a [u32; 2] could be encoded in a u64 and thus just be a
ValTree::Leaf(bits_of_two_u32), that is not a legal construction of ValTree
(and is very complex to do, so it is unlikely anyone is tempted to do so).
These rules also mean that some values are not representable. There can be no unions in type
level constants, as it is not clear how they should be represented, because their active variant
is unknown. Similarly there is no way to represent raw pointers, as addresses are unknown at
compile-time and thus we cannot make any assumptions about them. References on the other hand
can be represented, as equality for references is defined as equality on their value, so we
ignore their address and just look at the backing value. We must make sure that the pointer values
of the references are not observable at compile time. We thus encode &42 exactly like 42.
Any conversion from
valtree back to a MIR constant value must reintroduce an actual indirection. At codegen time the
addresses may be deduplicated between multiple uses or not, entirely depending on arbitrary
optimization choices.
As a consequence, all decoding of ValTree must happen by matching on the type first and making
decisions depending on that. The value itself gives no useful information without the type that
belongs to it.
Promoted constants
See the const-eval WG's docs on promotion.
MIR construction
unpack!all the things- Lowering expressions into the desired MIR
- Operator lowering
- Method call lowering
- Conditions
- Aggregate construction
The lowering of HIR to MIR occurs for the following (probably incomplete) list of items:
- Function and closure bodies
- Initializers of
staticandconstitems - Initializers of enum discriminants
- Glue and shims of any kind
- Tuple struct initializer functions
- Drop code (the
Drop::dropfunction is not called directly) - Drop implementations of types without an explicit
Dropimplementation
The lowering is triggered by calling the mir_built query. The MIR builder does
not actually use the HIR but operates on the THIR instead, processing THIR
expressions recursively.
The lowering creates local variables for every argument as specified in the signature.
Next, it creates local variables for every binding specified (e.g. (a, b): (i32, String))
produces 3 bindings, one for the argument, and two for the bindings. Next, it generates
field accesses that read the fields from the argument and writes the value to the binding
variable.
With this initialization out of the way, the lowering triggers a recursive call
to a function that generates the MIR for the body (a Block expression) and
writes the result into the RETURN_PLACE.
unpack! all the things
Functions that generate MIR tend to fall into one of two patterns. First, if the function generates only statements, then it will take a basic block as argument onto which those statements should be appended. It can then return a result as normal:
fn generate_some_mir(&mut self, block: BasicBlock) -> ResultType {
...
}
But there are other functions that may generate new basic blocks as well.
For example, lowering an expression like if foo { 22 } else { 44 }
requires generating a small "diamond-shaped graph".
In this case, the functions take a basic block where their code starts
and return a (potentially) new basic block where the code generation ends.
The BlockAnd type is used to represent this:
fn generate_more_mir(&mut self, block: BasicBlock) -> BlockAnd<ResultType> {
...
}
When you invoke these functions, it is common to have a local variable block
that is effectively a "cursor". It represents the point at which we are adding new MIR.
When you invoke generate_more_mir, you want to update this cursor.
You can do this manually, but it's tedious:
let mut block;
let v = match self.generate_more_mir(..) {
BlockAnd { block: new_block, value: v } => {
block = new_block;
v
}
};
For this reason, we offer a macro that lets you write
let v = unpack!(block = self.generate_more_mir(...)).
It simply extracts the new block and overwrites the
variable block that you named in the unpack!.
Lowering expressions into the desired MIR
There are essentially four kinds of representations one might want of an expression:
Placerefers to a (or part of a) preexisting memory location (local, static, promoted)Rvalueis something that can be assigned to aPlaceOperandis an argument to e.g. a+operation or a function call- a temporary variable containing a copy of the value
The following image depicts a general overview of the interactions between the representations:

Click here for a more detailed view
{kind=link}
We start out with lowering the function body to an Rvalue so we can create an
assignment to RETURN_PLACE, This Rvalue lowering will in turn trigger lowering to
Operand for its arguments (if any). Operand lowering either produces a const
operand, or moves/copies out of a Place, thus triggering a Place lowering. An
expression being lowered to a Place can in turn trigger a temporary to be created
if the expression being lowered contains operations. This is where the snake bites its
own tail and we need to trigger an Rvalue lowering for the expression to be written
into the local.
Operator lowering
Operators on builtin types are not lowered to function calls (which would end up being
infinite recursion calls, because the trait impls just contain the operation itself
again). Instead there are Rvalues for binary and unary operators and index operations.
These Rvalues later get codegened to llvm primitive operations or llvm intrinsics.
Operators on all other types get lowered to a function call to their impl of the
operator's corresponding trait.
Regardless of the lowering kind, the arguments to the operator are lowered to Operands.
This means all arguments are either constants, or refer to an already existing value
somewhere in a local or static.
Method call lowering
Method calls are lowered to the same TerminatorKind that function calls are.
In MIR there is no difference between method calls and function calls anymore.
Conditions
if conditions and match statements for enums with variants that have no fields are
lowered to TerminatorKind::SwitchInt. Each possible value (so 0 and 1 for if
conditions) has a corresponding BasicBlock to which the code continues.
The argument being branched on is (again) an Operand representing the value of
the if condition.
Pattern matching
match statements for enums with variants that have fields are lowered to
TerminatorKind::SwitchInt, too, but the Operand refers to a Place where the
discriminant of the value can be found. This often involves reading the discriminant
to a new temporary variable.
Aggregate construction
Aggregate values of any kind (e.g. structs or tuples) are built via Rvalue::Aggregate.
All fields are
lowered to Operators. This is essentially equivalent to one assignment
statement per aggregate field plus an assignment to the discriminant in the
case of enums.
MIR visitor
The MIR visitor is a convenient tool for traversing the MIR and either
looking for things or making changes to it. The visitor traits are
defined in the rustc_middle::mir::visit module – there are two of
them, generated via a single macro: Visitor (which operates on a
&Mir and gives back shared references) and MutVisitor (which
operates on a &mut Mir and gives back mutable references).
To implement a visitor, you have to create a type that represents your visitor. Typically, this type wants to "hang on" to whatever state you will need while processing MIR:
struct MyVisitor<...> {
tcx: TyCtxt<'tcx>,
...
}
and you then implement the Visitor or MutVisitor trait for that type:
impl<'tcx> MutVisitor<'tcx> for MyVisitor {
fn visit_foo(&mut self, ...) {
...
self.super_foo(...);
}
}
As shown above, within the impl, you can override any of the
visit_foo methods (e.g., visit_terminator) in order to write some
code that will execute whenever a foo is found. If you want to
recursively walk the contents of the foo, you then invoke the
super_foo method. (NB. You never want to override super_foo.)
A very simple example of a visitor can be found in LocalFinder.
By implementing visit_local method, this visitor identifies local variables that
can be candidates for reordering.
Traversal
In addition the visitor, the rustc_middle::mir::traversal module
contains useful functions for walking the MIR CFG in
different standard orders (e.g. pre-order, reverse
post-order, and so forth).
MIR queries and passes
If you would like to get the MIR:
- for a function - you can use the
optimized_mirquery (typically used by codegen) or themir_for_ctfequery (typically used by compile time function evaluation, i.e., CTFE); - for a promoted - you can use the
promoted_mirquery.
These will give you back the final, optimized MIR. For foreign def-ids, we simply read the MIR from the other crate's metadata. But for local def-ids, the query will construct the optimized MIR by requesting a pipeline of upstream queries1. Each query will contain a series of passes. This section describes how those queries and passes work and how you can extend them.
To produce the optimized MIR for a given def-id D, optimized_mir(D)
goes through several suites of passes, each grouped by a
query. Each suite consists of passes which perform linting, analysis, transformation or
optimization. Each query represent a useful intermediate point
where we can access the MIR dialect for type checking or other purposes:
mir_built(D)– it gives the initial MIR just after it's built;mir_const(D)– it applies some simple transformation passes to make MIR ready for const qualification;mir_promoted(D)- it extracts promotable temps into separate MIR bodies, and also makes MIR ready for borrow checking;mir_drops_elaborated_and_const_checked(D)- it performs borrow checking, runs major transformation passes (such as drop elaboration) and makes MIR ready for optimization;optimized_mir(D)– it performs all enabled optimizations and reaches the final state.
See the Queries chapter for the general concept of query.
Implementing and registering a pass
A MirPass is some bit of code that processes the MIR, typically transforming it along the way
somehow. But it may also do other things like linting (e.g., CheckPackedRef,
CheckConstItemMutation, FunctionItemReferences, which implement MirLint) or
optimization (e.g., SimplifyCfg, RemoveUnneededDrops). While most MIR passes
are defined in the rustc_mir_transform crate, the MirPass trait itself is
found in the rustc_middle crate, and it basically consists of one primary method,
run_pass, that simply gets an &mut Body (along with the tcx).
The MIR is therefore modified in place (which helps to keep things efficient).
A basic example of a MIR pass is RemoveStorageMarkers, which walks
the MIR and removes all storage marks if they won't be emitted during codegen. As you
can see from its source, a MIR pass is defined by first defining a
dummy type, a struct with no fields:
#![allow(unused)] fn main() { pub struct RemoveStorageMarkers; }
for which we implement the MirPass trait. We can then insert
this pass into the appropriate list of passes found in a query like
mir_built, optimized_mir, etc. (If this is an optimization, it
should go into the optimized_mir list.)
Another example of a simple MIR pass is CleanupPostBorrowck, which walks
the MIR and removes all statements that are not relevant to code generation. As you can see from
its source, it is defined by first defining a dummy type, a struct with no
fields:
#![allow(unused)] fn main() { pub struct CleanupPostBorrowck; }
for which we implement the MirPass trait:
#![allow(unused)] fn main() { impl<'tcx> MirPass<'tcx> for CleanupPostBorrowck { fn run_pass(&self, tcx: TyCtxt<'tcx>, body: &mut Body<'tcx>) { ... } } }
We register this pass inside the mir_drops_elaborated_and_const_checked query.
(If this is an optimization, it should go into the optimized_mir list.)
If you are writing a pass, there's a good chance that you are going to want to use a MIR visitor. MIR visitors are a handy way to walk all the parts of the MIR, either to search for something or to make small edits.
Stealing
The intermediate queries mir_const() and mir_promoted() yield up
a &'tcx Steal<Body<'tcx>>, allocated using tcx.alloc_steal_mir().
This indicates that the result may be stolen by a subsequent query – this is an
optimization to avoid cloning the MIR. Attempting to use a stolen
result will cause a panic in the compiler. Therefore, it is important
that you do not accidentally read from these intermediate queries without
the consideration of the dependency in the MIR processing pipeline.
Because of this stealing mechanism, some care must be taken to ensure that, before the MIR at a particular phase in the processing pipeline is stolen, anyone who may want to read from it has already done so.
Concretely, this means that if you have a query foo(D)
that wants to access the result of mir_promoted(D), you need to have foo(D)
calling the mir_const(D) query first. This will force it
to execute even though you don't directly require its result.
This mechanism is a bit dodgy. There is a discussion of more elegant alternatives in rust-lang/rust#41710.
Overview
Below is an overview of the stealing dependency in the MIR processing pipeline2:
flowchart BT mir_for_ctfe* --borrow--> id40 id5 --steal--> id40 mir_borrowck* --borrow--> id3 id41 --steal part 1--> id3 id40 --steal part 0--> id3 mir_const_qualif* -- borrow --> id2 id3 -- steal --> id2 id2 -- steal --> id1 id1([mir_built]) id2([mir_const]) id3([mir_promoted]) id40([mir_drops_elaborated_and_const_checked]) id41([promoted_mir]) id5([optimized_mir]) style id1 fill:#bbf style id2 fill:#bbf style id3 fill:#bbf style id40 fill:#bbf style id41 fill:#bbf style id5 fill:#bbf
The stadium-shape queries (e.g., mir_built) with a deep color are the primary queries in the
pipeline, while the rectangle-shape queries (e.g., mir_const_qualif*3) with a shallow color
are those subsequent queries that need to read the results from &'tcx Steal<Body<'tcx>>. With the
stealing mechanism, the rectangle-shape queries must be performed before any stadium-shape queries,
that have an equal or larger height in the dependency tree, ever do.
The mir_promoted query will yield up a tuple
(&'tcx Steal<Body<'tcx>>, &'tcx Steal<IndexVec<Promoted, Body<'tcx>>>), promoted_mir will steal
part 1 (&'tcx Steal<IndexVec<Promoted, Body<'tcx>>>) and mir_drops_elaborated_and_const_checked
will steal part 0 (&'tcx Steal<Body<'tcx>>). And their stealing is irrelevant to each other,
i.e., can be performed separately.
Note that the * suffix in the queries represent a set of queries with the same prefix.
For example, mir_borrowck* represents mir_borrowck, mir_borrowck_const_arg and
mir_borrowck_opt_const_arg.
Example
As an example, consider MIR const qualification. It wants to read the result produced by the
mir_const query. However, that result will be stolen by the mir_promoted query at some
time in the pipeline. Before mir_promoted is ever queried, calling the mir_const_qualif query
will succeed since mir_const will produce (if queried the first time) or cache (if queried
multiple times) the Steal result and the result is not stolen yet. After mir_promoted is
queried, the result would be stolen and calling the mir_const_qualif query to read the result
would cause a panic.
Therefore, with this stealing mechanism, mir_promoted should guarantee any mir_const_qualif*
queries are called before it actually steals, thus ensuring that the reads have already happened
(remember that queries are memoized, so executing a query twice
simply loads from a cache the second time).
Identifiers in the compiler
If you have read the few previous chapters, you now know that rustc uses
many different intermediate representations to perform different kinds of analyses.
However, like in every data structure, you need a way to traverse the structure
and refer to other elements. In this chapter, you will find information on the
different identifiers rustc uses for each intermediate representation.
In the AST
A NodeId is an identifier number that uniquely identifies an AST node within
a crate. Every node in the AST has its own NodeId, including top-level items
such as structs, but also individual statements and expressions.
However, because they are absolute within a crate, adding or removing a single
node in the AST causes all the subsequent NodeIds to change. This renders
NodeIds pretty much useless for incremental compilation, where you want as
few things as possible to change.
NodeIds are used in all the rustc bits that operate directly on the AST,
like macro expansion and name resolution.
In the HIR
The HIR uses a bunch of different identifiers that coexist and serve different purposes.
-
A
DefId, as the name suggests, identifies a particular definition, or top-level item, in a given crate. It is composed of two parts: aCrateNumwhich identifies the crate the definition comes from, and aDefIndexwhich identifies the definition within the crate. UnlikeHirIds, there isn't aDefIdfor every expression, which makes them more stable across compilations. -
A
LocalDefIdis basically aDefIdthat is known to come from the current crate. This allows us to drop theCrateNumpart, and use the type system to ensure that only local definitions are passed to functions that expect a local definition. -
A
HirIduniquely identifies a node in the HIR of the current crate. It is composed of two parts: anownerand alocal_idthat is unique within theowner. This combination makes for more stable values which are helpful for incremental compilation. UnlikeDefIds, aHirIdcan refer to fine-grained entities like expressions, but stays local to the current crate. -
A
BodyIdidentifies a HIRBodyin the current crate. It is currently only a wrapper around aHirId. For more info about HIR bodies, please refer to the HIR chapter.
These identifiers can be converted into one another through the HIR map. See the HIR chapter for more detailed information.
In the MIR
-
BasicBlockidentifies a basic block. It points to an instance ofBasicBlockData, which can be retrieved by indexing intoBody.basic_blocks. -
Localidentifies a local variable in a function. Its associated data is inLocalDecl, which can be retrieved by indexing intoBody.local_decls. -
FieldIdxidentifies a struct's, union's, or enum variant's field. It is used as a "projection" inPlace. -
SourceScopeidentifies a name scope in the original source code. Used for diagnostics and for debuginfo in debuggers. It points to an instance ofSourceScopeData, which can be retrieved by indexing intoBody.source_scopes. -
Promotedidentifies a promoted constant within another item (related to const evaluation). Note: it is unique only locally within the item, so it should be associated with aDefId.GlobalIdwill give you a more specific identifier. -
GlobalIdidentifies a global variable: aconst, astatic, aconst fnwhere all arguments are zero-sized types, or a promoted constant. -
Locationrepresents the location in the MIR of a statement or terminator. It identifies the block (usingBasicBlock) and the index of the statement or terminator in the block.
Closure Expansion in rustc
This section describes how rustc handles closures. Closures in Rust are
effectively "desugared" into structs that contain the values they use (or
references to the values they use) from their creator's stack frame. rustc has
the job of figuring out which values a closure uses and how, so it can decide
whether to capture a given variable by shared reference, mutable reference, or
by move. rustc also has to figure out which of the closure traits (Fn,
FnMut, or FnOnce) a closure is capable of
implementing.
Let's start with a few examples:
Example 1
To start, let's take a look at how the closure in the following example is desugared:
fn closure(f: impl Fn()) { f(); } fn main() { let x: i32 = 10; closure(|| println!("Hi {}", x)); // The closure just reads x. println!("Value of x after return {}", x); }
Let's say the above is the content of a file called immut.rs. If we compile
immut.rs using the following command. The -Z dump-mir=all flag will cause
rustc to generate and dump the MIR to a directory called mir_dump.
> rustc +stage1 immut.rs -Z dump-mir=all
After we run this command, we will see a newly generated directory in our
current working directory called mir_dump, which will contain several files.
If we look at file rustc.main.-------.mir_map.0.mir, we will find, among
other things, it also contains this line:
_4 = &_1;
_3 = [[email protected]:7:13: 7:36] { x: move _4 };
Note that in the MIR examples in this chapter, _1 is x.
Here in first line _4 = &_1;, the mir_dump tells us that x was borrowed
as an immutable reference. This is what we would hope as our closure just
reads x.
Example 2
Here is another example:
fn closure(mut f: impl FnMut()) { f(); } fn main() { let mut x: i32 = 10; closure(|| { x += 10; // The closure mutates the value of x println!("Hi {}", x) }); println!("Value of x after return {}", x); }
_4 = &mut _1;
_3 = [[email protected]:7:13: 10:6] { x: move _4 };
This time along, in the line _4 = &mut _1;, we see that the borrow is changed to mutable borrow.
Fair enough! The closure increments x by 10.
Example 3
One more example:
fn closure(f: impl FnOnce()) { f(); } fn main() { let x = vec![21]; closure(|| { drop(x); // Makes x unusable after the fact. }); // println!("Value of x after return {:?}", x); }
_6 = [[email protected]:7:13: 9:6] { x: move _1 }; // bb16[3]: scope 1 at move.rs:7:13: 9:6
Here, x is directly moved into the closure and the access to it will not be permitted after the
closure.
Inferences in the compiler
Now let's dive into rustc code and see how all these inferences are done by the compiler.
Let's start with defining a term that we will be using quite a bit in the rest of the discussion -
upvar. An upvar is a variable that is local to the function where the closure is defined. So,
in the above examples, x will be an upvar to the closure. They are also sometimes referred to as
the free variables meaning they are not bound to the context of the closure.
compiler/rustc_passes/src/upvars.rs defines a query called upvars_mentioned
for this purpose.
Other than lazy invocation, one other thing that distinguishes a closure from a
normal function is that it can use the upvars. It borrows these upvars from its surrounding
context; therefore the compiler has to determine the upvar's borrow type. The compiler starts with
assigning an immutable borrow type and lowers the restriction (that is, changes it from
immutable to mutable to move) as needed, based on the usage. In the Example 1 above, the
closure only uses the variable for printing but does not modify it in any way and therefore, in the
mir_dump, we find the borrow type for the upvar x to be immutable. In example 2, however, the
closure modifies x and increments it by some value. Because of this mutation, the compiler, which
started off assigning x as an immutable reference type, has to adjust it as a mutable reference.
Likewise in the third example, the closure drops the vector and therefore this requires the variable
x to be moved into the closure. Depending on the borrow kind, the closure has to implement the
appropriate trait: Fn trait for immutable borrow, FnMut for mutable borrow,
and FnOnce for move semantics.
Most of the code related to the closure is in the
compiler/rustc_hir_typeck/src/upvar.rs file and the data structures are
declared in the file compiler/rustc_middle/src/ty/mod.rs.
Before we go any further, let's discuss how we can examine the flow of control through the rustc
codebase. For closures specifically, set the RUSTC_LOG env variable as below and collect the
output in a file:
> RUSTC_LOG=rustc_hir_typeck::upvar rustc +stage1 -Z dump-mir=all \
<.rs file to compile> 2> <file where the output will be dumped>
This uses the stage1 compiler and enables debug! logging for the
rustc_hir_typeck::upvar module.
The other option is to step through the code using lldb or gdb.
rust-lldb build/host/stage1/bin/rustc test.rs- In lldb:
b upvar.rs:134// Setting the breakpoint on a certain line in the upvar.rs file`r// Run the program until it hits the breakpoint
Let's start with upvar.rs. This file has something called
the euv::ExprUseVisitor which walks the source of the closure and
invokes a callback for each upvar that is borrowed, mutated, or moved.
fn main() { let mut x = vec![21]; let _cl = || { let y = x[0]; // 1. x[0] += 1; // 2. }; }
In the above example, our visitor will be called twice, for the lines marked 1 and 2, once for a shared borrow and another one for a mutable borrow. It will also tell us what was borrowed.
The callbacks are defined by implementing the Delegate trait. The
InferBorrowKind type implements Delegate and keeps a map that
records for each upvar which mode of capture was required. The modes of capture
can be ByValue (moved) or ByRef (borrowed). For ByRef borrows, the possible
BorrowKinds are ImmBorrow, UniqueImmBorrow, MutBorrow as defined in the
compiler/rustc_middle/src/ty/mod.rs.
Delegate defines a few different methods (the different callbacks):
consume for move of a variable, borrow for a borrow of some kind
(shared or mutable), and mutate when we see an assignment of something.
All of these callbacks have a common argument cmt which stands for Category,
Mutability and Type and is defined in
compiler/rustc_hir_typeck/src/expr_use_visitor.rs. Borrowing from the code
comments, "cmt is a complete categorization of a value indicating where it
originated and how it is located, as well as the mutability of the memory in
which the value is stored". Based on the callback (consume, borrow etc.), we
will call the relevant adjust_upvar_borrow_kind_for_<something> and pass the
cmt along. Once the borrow type is adjusted, we store it in the table, which
basically says what borrows were made for each closure.
self.tables
.borrow_mut()
.upvar_capture_map
.extend(delegate.adjust_upvar_captures);
Inline assembly
Overview
Inline assembly in rustc mostly revolves around taking an asm! macro invocation and plumbing it
through all of the compiler layers down to LLVM codegen. Throughout the various stages, an
InlineAsm generally consists of 3 components:
-
The template string, which is stored as an array of
InlineAsmTemplatePiece. Each piece represents either a literal or a placeholder for an operand (just like format strings).#![allow(unused)] fn main() { pub enum InlineAsmTemplatePiece { String(String), Placeholder { operand_idx: usize, modifier: Option<char>, span: Span }, } } -
The list of operands to the
asm!(in,[late]out,in[late]out,sym,const). These are represented differently at each stage of lowering, but follow a common pattern:in,outandinoutall have an associated register class (reg) or explicit register ("eax").inouthas 2 forms: one with a single expression that is both read from and written to, and one with two separate expressions for the input and output parts.outandinouthave alateflag (lateout/inlateout) to indicate that the register allocator is allowed to reuse an input register for this output.outand the split variant ofinoutallow_to be specified for an output, which means that the output is discarded. This is used to allocate scratch registers for assembly code.constrefers to an anonymous constants and generally works like an inline const.symis a bit special since it only accepts a path expression, which must point to astaticor afn.
-
The options set at the end of the
asm!macro. The only ones that are of particular interest to rustc areNORETURNwhich makesasm!return!instead of(), andRAWwhich disables format string parsing. The remaining options are mostly passed through to LLVM with little processing.#![allow(unused)] fn main() { bitflags::bitflags! { pub struct InlineAsmOptions: u16 { const PURE = 1 << 0; const NOMEM = 1 << 1; const READONLY = 1 << 2; const PRESERVES_FLAGS = 1 << 3; const NORETURN = 1 << 4; const NOSTACK = 1 << 5; const ATT_SYNTAX = 1 << 6; const RAW = 1 << 7; const MAY_UNWIND = 1 << 8; } } }
AST
InlineAsm is represented as an expression in the AST:
#![allow(unused)] fn main() { pub struct InlineAsm { pub template: Vec<InlineAsmTemplatePiece>, pub template_strs: Box<[(Symbol, Option<Symbol>, Span)]>, pub operands: Vec<(InlineAsmOperand, Span)>, pub clobber_abi: Option<(Symbol, Span)>, pub options: InlineAsmOptions, pub line_spans: Vec<Span>, } pub enum InlineAsmRegOrRegClass { Reg(Symbol), RegClass(Symbol), } pub enum InlineAsmOperand { In { reg: InlineAsmRegOrRegClass, expr: P<Expr>, }, Out { reg: InlineAsmRegOrRegClass, late: bool, expr: Option<P<Expr>>, }, InOut { reg: InlineAsmRegOrRegClass, late: bool, expr: P<Expr>, }, SplitInOut { reg: InlineAsmRegOrRegClass, late: bool, in_expr: P<Expr>, out_expr: Option<P<Expr>>, }, Const { anon_const: AnonConst, }, Sym { expr: P<Expr>, }, } }
The asm! macro is implemented in rustc_builtin_macros and outputs an InlineAsm AST node. The
template string is parsed using fmt_macros, positional and named operands are resolved to
explicit operand indices. Since target information is not available to macro invocations,
validation of the registers and register classes is deferred to AST lowering.
HIR
InlineAsm is represented as an expression in the HIR:
#![allow(unused)] fn main() { pub struct InlineAsm<'hir> { pub template: &'hir [InlineAsmTemplatePiece], pub template_strs: &'hir [(Symbol, Option<Symbol>, Span)], pub operands: &'hir [(InlineAsmOperand<'hir>, Span)], pub options: InlineAsmOptions, pub line_spans: &'hir [Span], } pub enum InlineAsmRegOrRegClass { Reg(InlineAsmReg), RegClass(InlineAsmRegClass), } pub enum InlineAsmOperand<'hir> { In { reg: InlineAsmRegOrRegClass, expr: Expr<'hir>, }, Out { reg: InlineAsmRegOrRegClass, late: bool, expr: Option<Expr<'hir>>, }, InOut { reg: InlineAsmRegOrRegClass, late: bool, expr: Expr<'hir>, }, SplitInOut { reg: InlineAsmRegOrRegClass, late: bool, in_expr: Expr<'hir>, out_expr: Option<Expr<'hir>>, }, Const { anon_const: AnonConst, }, Sym { expr: Expr<'hir>, }, } }
AST lowering is where InlineAsmRegOrRegClass is converted from Symbols to an actual register or
register class. If any modifiers are specified for a template string placeholder, these are
validated against the set allowed for that operand type. Finally, explicit registers for inputs and
outputs are checked for conflicts (same register used for different operands).
Type checking
Each register class has a whitelist of types that it may be used with. After the types of all
operands have been determined, the intrinsicck pass will check that these types are in the
whitelist. It also checks that split inout operands have compatible types and that const
operands are integers or floats. Suggestions are emitted where needed if a template modifier should
be used for an operand based on the type that was passed into it.
THIR
InlineAsm is represented as an expression in the THIR:
#![allow(unused)] fn main() { crate enum ExprKind<'tcx> { // [..] InlineAsm { template: &'tcx [InlineAsmTemplatePiece], operands: Box<[InlineAsmOperand<'tcx>]>, options: InlineAsmOptions, line_spans: &'tcx [Span], }, } crate enum InlineAsmOperand<'tcx> { In { reg: InlineAsmRegOrRegClass, expr: ExprId, }, Out { reg: InlineAsmRegOrRegClass, late: bool, expr: Option<ExprId>, }, InOut { reg: InlineAsmRegOrRegClass, late: bool, expr: ExprId, }, SplitInOut { reg: InlineAsmRegOrRegClass, late: bool, in_expr: ExprId, out_expr: Option<ExprId>, }, Const { value: &'tcx Const<'tcx>, span: Span, }, SymFn { expr: ExprId, }, SymStatic { def_id: DefId, }, } }
The only significant change compared to HIR is that Sym has been lowered to either a SymFn
whose expr is a Literal ZST of the fn, or a SymStatic which points to the DefId of a
static.
MIR
InlineAsm is represented as a Terminator in the MIR:
#![allow(unused)] fn main() { pub enum TerminatorKind<'tcx> { // [..] /// Block ends with an inline assembly block. This is a terminator since /// inline assembly is allowed to diverge. InlineAsm { /// The template for the inline assembly, with placeholders. template: &'tcx [InlineAsmTemplatePiece], /// The operands for the inline assembly, as `Operand`s or `Place`s. operands: Vec<InlineAsmOperand<'tcx>>, /// Miscellaneous options for the inline assembly. options: InlineAsmOptions, /// Source spans for each line of the inline assembly code. These are /// used to map assembler errors back to the line in the source code. line_spans: &'tcx [Span], /// Destination block after the inline assembly returns, unless it is /// diverging (InlineAsmOptions::NORETURN). destination: Option<BasicBlock>, }, } pub enum InlineAsmOperand<'tcx> { In { reg: InlineAsmRegOrRegClass, value: Operand<'tcx>, }, Out { reg: InlineAsmRegOrRegClass, late: bool, place: Option<Place<'tcx>>, }, InOut { reg: InlineAsmRegOrRegClass, late: bool, in_value: Operand<'tcx>, out_place: Option<Place<'tcx>>, }, Const { value: Box<Constant<'tcx>>, }, SymFn { value: Box<Constant<'tcx>>, }, SymStatic { def_id: DefId, }, } }
As part of THIR lowering, InOut and SplitInOut operands are lowered to a split form with a
separate in_value and out_place.
Semantically, the InlineAsm terminator is similar to the Call terminator except that it has
multiple output places where a Call only has a single return place output.
Codegen
Operands are lowered one more time before being passed to LLVM codegen:
#![allow(unused)] fn main() { pub enum InlineAsmOperandRef<'tcx, B: BackendTypes + ?Sized> { In { reg: InlineAsmRegOrRegClass, value: OperandRef<'tcx, B::Value>, }, Out { reg: InlineAsmRegOrRegClass, late: bool, place: Option<PlaceRef<'tcx, B::Value>>, }, InOut { reg: InlineAsmRegOrRegClass, late: bool, in_value: OperandRef<'tcx, B::Value>, out_place: Option<PlaceRef<'tcx, B::Value>>, }, Const { string: String, }, SymFn { instance: Instance<'tcx>, }, SymStatic { def_id: DefId, }, } }
The operands are lowered to LLVM operands and constraint codes as follow:
outand the output part ofinoutoperands are added first, as required by LLVM. Late output operands have a=prefix added to their constraint code, non-late output operands have a=&prefix added to their constraint code.inoperands are added normally.inoutoperands are tied to the matching output operand.symoperands are passed as function pointers or pointers, using the"s"constraint.constoperands are formatted to a string and directly inserted in the template string.
The template string is converted to LLVM form:
$characters are escaped as$$.constoperands are converted to strings and inserted directly.- Placeholders are formatted as
${X:M}whereXis the operand index andMis the modifier character. Modifiers are converted from the Rust form to the LLVM form.
The various options are converted to clobber constraints or LLVM attributes, refer to the RFC for more details.
Note that LLVM is sometimes rather picky about what types it accepts for certain constraint codes so we sometimes need to insert conversions to/from a supported type. See the target-specific ISelLowering.cpp files in LLVM for details of what types are supported for each register class.
Adding support for new architectures
Adding inline assembly support to an architecture is mostly a matter of defining the registers and
register classes for that architecture. All the definitions for register classes are located in
compiler/rustc_target/asm/.
Additionally you will need to implement lowering of these register classes to LLVM constraint codes
in compiler/rustc_codegen_llvm/asm.rs.
When adding a new architecture, make sure to cross-reference with the LLVM source code:
- LLVM has restrictions on which types can be used with a particular constraint code. Refer to the
getRegForInlineAsmConstraintfunction inlib/Target/${ARCH}/${ARCH}ISelLowering.cpp. - LLVM reserves certain registers for its internal use, which causes them to not be saved/restored
properly around inline assembly blocks. These registers are listed in the
getReservedRegsfunction inlib/Target/${ARCH}/${ARCH}RegisterInfo.cpp. Any "conditionally" reserved register such as the frame/base pointer must always be treated as reserved for Rust purposes because we can't know ahead of time whether a function will require a frame/base pointer.
Tests
Various tests for inline assembly are available:
tests/assembly/asmtests/ui/asmtests/codegen/asm-*
Every architecture supported by inline assembly must have exhaustive tests in
tests/assembly/asm which test all combinations of register classes and types.
Analysis
This part discusses the many analyses that the compiler uses to check various properties of the code and to inform later stages. Typically, this is what people mean when they talk about "Rust's type system". This includes the representation, inference, and checking of types, the trait system, and the borrow checker. These analyses do not happen as one big pass or set of contiguous passes. Rather, they are spread out throughout various parts of the compilation process and use different intermediate representations. For example, type checking happens on the HIR, while borrow checking happens on the MIR. Nonetheless, for the sake of presentation, we will discuss all of these analyses in this part of the guide.
Generic parameter definitions
This chapter will discuss how rustc tracks what generic parameters are introduced by an item. For example given some struct defined via struct Foo<T> how does rustc track that Foo defines some type parameter T and nothing else?
This will not cover how we track generic parameters introduced via for<'a> syntax (i.e. in where clauses or fn types), which is covered elsewhere in the chapter on Binders .
What is ty::Generics
The generic parameters introduced by an item are tracked the ty::Generics struct. Sometimes items allows usage of generics of parent items inside of them, this is accomplished via the ty::Generics struct having an optional field to specify a parent item to inherit generic parameters of. For example given the following code:
trait Trait<T> {
fn foo<U>(&self);
}
The ty::Generics used for foo would contain [U] and a parent of Some(Trait). Trait would have a ty::Generics containing [Self, T] with a parent of None.
The GenericParamDef struct is used to represent each individual generic parameter in a ty::Generics listing. The GenericParamDef struct contains information about the generic parameter, for example its name, defid, what kind of parameter it is (i.e. type, const, lifetime).
GenericParamDef also contains a u32 index representing what position the parameter is (starting from the outermost parent), this is the value used to represent usages of generic parameters (more on this in the chapter on representing types).
Interestingly, ty::Generics does not currently contain every generic parameter defined on an item. In the case of functions it only contains the early bound lifetime parameters. See the next chapter for information on what "early bound" and "late bound" parameters are.
Early/Late bound parameters
This section discusses what it means for generic parameters to be early or late bound.
#![allow(unused)] fn main() { fn foo<'a, T>(b: &'a T) -> &'a T { b } // ^^ ^early bound // ^^ // ^^late bound }
Generally when referring to an item with generic parameters you must specify a list of generic arguments corresponding to the item's generic parameters. In
some cases it is permitted to elide these arguments but still, implicitly, a set of arguments are provided (i.e. Vec::default() desugars to Vec::<_>::default()).
For functions this is not necessarily the case, for example if we take the function foo from the example above and write the following code:
fn main() { let f = foo::<_>; let b = String::new(); let c = String::new(); f(&b); drop(b); f(&c); }
This code compiles perfectly fine even though there is no single lifetime that could possibly be specified in foo::<_> that would allow for both
the &b and &c borrows to be used as arguments (note: the drop(b) line forces the &b borrow to be shorter than the &c borrow). This works because
the 'a lifetime is late bound.
A generic parameter being late bound means that when we write foo::<_> we do not actually provide an argument for that parameter, instead we wait until calling the function to provide the generic argument. In the above example this means that we are doing something like f::<'_>(&b); and f::<'_>(&c); (although in practice we do not actually support turbofishing late bound parameters in this manner)
It may be helpful to think of "early bound parameter" or "late bound parameter" as meaning "early provided parameter" and "late provided parameter", i.e. we provide the argument to the parameter either early (when naming the function) or late (when calling it).
Early and Late Bound Parameter Implementation Nuances
Understanding this page likely requires a rudimentary understanding of higher ranked
trait bounds/for<'a>and also what types such as dyn for<'a> Trait<'a> and
for<'a> fn(&'a u32) mean. Reading the nomincon chapter
on HRTB may be useful for understanding this syntax. The meaning of for<'a> fn(&'a u32)
is incredibly similar to the meaning of T: for<'a> Trait<'a>.
What does it mean for parameters to be early or late bound
All function definitions conceptually have a ZST (this is represented by TyKind::FnDef in rustc).
The only generics on this ZST are the early bound parameters of the function definition. e.g.
fn foo<'a>(_: &'a u32) {} fn main() { let b = foo; // ^ `b` has type `FnDef(foo, [])` (no args because `'a` is late bound) assert!(std::mem::size_of_val(&b) == 0); }
In order to call b the late bound parameters do need to be provided, these are inferred at the
call site instead of when we refer to foo.
fn main() { let b = foo; let a: &'static u32 = &10; foo(a); // the lifetime argument for `'a` on `foo` is inferred at the callsite // the generic parameter `'a` on `foo` is inferred to `'static` here }
Because late bound parameters are not part of the FnDef's args this allows us to prove trait
bounds such as F: for<'a> Fn(&'a u32) where F is foo's FnDef. e.g.
fn foo_early<'a, T: Trait<'a>>(_: &'a u32, _: T) {} fn foo_late<'a, T>(_: &'a u32, _: T) {} fn accepts_hr_func<F: for<'a> Fn(&'a u32, u32)>(_: F) {} fn main() { // doesn't work, the substituted bound is `for<'a> FnDef<'?0>: Fn(&'a u32, u32)` // `foo_early` only implements `for<'a> FnDef<'a>: Fn(&'a u32, u32)`- the lifetime // of the borrow in the function argument must be the same as the lifetime // on the `FnDef`. accepts_hr_func(foo_early); // works, the substituted bound is `for<'a> FnDef: Fn(&'a u32, u32)` accepts_hr_func(foo_late); } // the builtin `Fn` impls for `foo_early` and `foo_late` look something like: // `foo_early` impl<'a, T: Trait<'a>> Fn(&'a u32, T) for FooEarlyFnDef<'a, T> { ... } // `foo_late` impl<'a, T> Fn(&'a u32, T) for FooLateFnDef<T> { ... }
Early bound parameters are present on the FnDef. Late bound generic parameters are not present
on the FnDef but are instead constrained by the builtin Fn* impl.
The same distinction applies to closures. Instead of FnDef we are talking about the anonymous
closure type. Closures are currently unsound in
ways that are closely related to the distinction between early/late bound
parameters (more on this later)
The early/late boundness of generic parameters is only relevant for the desugaring of
functions/closures into types with builtin Fn* impls. It does not make sense to talk about
in other contexts.
The generics_of query in rustc only contains early bound parameters. In this way it acts more
like generics_of(my_func) is the generics for the FnDef than the generics provided to the function
body although it's not clear to the author of this section if this was the actual justification for
making generics_of behave this way.
What parameters are currently late bound
Below are the current requirements for determining if a generic parameter is late bound. It is worth keeping in mind that these are not necessarily set in stone and it is almost certainly possible to be more flexible.
Must be a lifetime parameter
Rust can't support types such as for<T> dyn Trait<T> or for<T> fn(T), this is a
fundamental limitation of the language as we are required to monomorphize type/const
parameters and cannot do so behind dynamic dispatch. (technically we could probably
support for<T> dyn MarkerTrait<T> as there is nothing to monomorphize)
Not being able to support for<T> dyn Trait<T> resulted in making all type and const
parameters early bound. Only lifetime parameters can be late bound.
Must not appear in the where clauses
In order for a generic parameter to be late bound it must not appear in any where clauses. This is currently an incredibly simplistic check that causes lifetimes to be early bound even if the where clause they appear in are always true, or implied by well formedness of function arguments. e.g.
#![allow(unused)] fn main() { fn foo1<'a: 'a>(_: &'a u32) {} // ^^ early bound parameter because it's in a `'a: 'a` clause // even though the bound obviously holds all the time fn foo2<'a, T: Trait<'a>(a: T, b: &'a u32) {} // ^^ early bound parameter because it's used in the `T: Trait<'a>` clause fn foo3<'a, T: 'a>(_: &'a T) {} // ^^ early bound parameter because it's used in the `T: 'a` clause // even though that bound is implied by wellformedness of `&'a T` fn foo4<'a, 'b: 'a>(_: Inv<&'a ()>, _: Inv<&'b ()>) {} // ^^ ^^ ^^^ note: // ^^ ^^ `Inv` stands for `Invariant` and is used to // ^^ ^^ make the type parameter invariant. This // ^^ ^^ is necessary for demonstration purposes as // ^^ ^^ `for<'a, 'b> fn(&'a (), &'b ())` and // ^^ ^^ `for<'a> fn(&'a u32, &'a u32)` are subtypes- // ^^ ^^ of each other which makes the bound trivially // ^^ ^^ satisfiable when making the fnptr. `Inv` // ^^ ^^ disables this subtyping. // ^^ ^^ // ^^^^^^ both early bound parameters because they are present in the // `'b: 'a` clause }
The reason for this requirement is that we cannot represent the T: Trait<'a> or 'a: 'b clauses
on a function pointer. for<'a, 'b> fn(Inv<&'a ()>, Inv<&'b ()>) is not a valid function pointer to
representfoo4 as it would allow calling the function without 'b: 'a holding.
Must be constrained by where clauses or function argument types
The builtin impls of the Fn* traits for closures and FnDefs cannot not have any unconstrained
parameters. For example the following impl is illegal:
#![allow(unused)] fn main() { impl<'a> Trait for u32 { type Assoc = &'a u32; } }
We must not end up with a similar impl for the Fn* traits e.g.
#![allow(unused)] fn main() { impl<'a> Fn<()> for FnDef { type Assoc = &'a u32 } }
Violating this rule can trivially lead to unsoundness as seen in #84366. Additionally if we ever support late bound type params then an impl like:
#![allow(unused)] fn main() { impl<T> Fn<()> for FnDef { type Assoc = T; } }
would break the compiler in various ways.
In order to ensure that everything functions correctly, we do not allow generic parameters to be late bound if it would result in a builtin impl that does not constrain all of the generic parameters on the builtin impl. Making a generic parameter be early bound trivially makes it be constrained by the builtin impl as it ends up on the self type.
Because of the requirement that late bound parameters must not appear in where clauses, checking this is simpler than the rules for checking impl headers constrain all the parameters on the impl. We only have to ensure that all late bound parameters appear at least once in the function argument types outside of an alias (e.g. an associated type).
The requirement that they not indirectly be in the args of an alias for it to count is the same as why the follow code is forbidden:
#![allow(unused)] fn main() { impl<T: Trait> OtherTrait for <T as Trait>::Assoc { type Assoc = T } }
There is no guarantee that <T as Trait>::Assoc will normalize to different types for every
instantiation of T. If we were to allow this impl we could get overlapping impls and the
same is true of the builtin Fn* impls.
Making more generic parameters late bound
It is generally considered desirable for more parameters to be late bound as it makes
the builtin Fn* impls more flexible. Right now many of the requirements for making
a parameter late bound are overly restrictive as they are tied to what we can currently
(or can ever) do with fn ptrs.
It would be theoretically possible to support late bound params in where-clauses in the
language by introducing implication types which would allow us to express types such as:
for<'a, 'b: 'a> fn(Inv<&'a u32>, Inv<&'b u32>) which would ensure 'b: 'a is upheld when
calling the function pointer.
It would also be theoretically possible to support it by making the coercion to a fn ptr
instantiate the parameter with an infer var while still allowing the FnDef to not have the
generic parameter present as trait impls are perfectly capable of representing the where clauses
on the function on the impl itself. This would also allow us to support late bound type/const
vars allowing bounds like F: for<T> Fn(T) to hold.
It is almost somewhat unclear if we can change the Fn traits to be structured differently
so that we never have to make a parameter early bound just to make the builtin impl have all
generics be constrained. Of all the possible causes of a generic parameter being early bound
this seems the most difficult to remove.
Whether these would be good ideas to implement is a separate question- they are only brought up to illustrate that the current rules are not necessarily set in stone and a result of "its the only way of doing this".
Turbofishing's interactions with early/late bound parameters
The early/late bound parameter distinction on functions introduces some complications when providing generic arguments to functions. This document discusses what those are and how they might interact with future changes to make more things late bound.
Can't turbofish generic arguments on functions sometimes
When a function has any late bound lifetime parameters (be they explicitly defined or
implicitly introduced via lifetime elision) we disallow specifying any lifetime arguments
on the function. Sometimes this is a hard error other times it is a future compat lint
(late_bound_lifetime_arguments).
fn early<'a: 'a>(a: &'a ()) -> &'a () { a } fn late<'a>(a: &'a ()) -> &'a () { a } fn mixed<'a, 'b: 'b>(a: &'a (), b: &'b ()) -> &'a () { a } struct Foo; impl Foo { fn late<'a>(self, a: &'a ()) -> &'a () { a } } fn main() { // fine let f = early::<'static>; // some variation of hard errors and future compat lints Foo.late::<'static>(&()); let f = late::<'static>; let f = mixed::<'static, 'static>; let f = mixed::<'static>; late::<'static>(&()); }
The justification for this is that late bound parameters are not present on the
FnDef so the arguments to late bound parameters can't be present in the substs
for the type. i.e. the late function in the above code snippet would not have
any generic parameters on the FnDef zst:
#![allow(unused)] fn main() { // example desugaring of the `late` function and its zst + builtin Fn impl struct LateFnDef; impl<'a> Fn<(&'a ())> for LateFnDef { type Output = &'a (); ... } }
The cause for some situations giving future compat lints and others giving hard errors is a little arbitrary but explainable:
- It's always a hard error for method calls
- It's only a hard error on paths to free functions if there is no unambiguous way to create the substs for the fndef from the lifetime arguments. (i.e. the amount of lifetimes provided must be exactly equal to the amount of early bound lifetimes or else it's a hard error)
Back compat issues from turning early bound to late bound
Because of the previously mentioned restriction on turbofishing generic arguments, it is a breaking change to upgrade a lifetime from early bound to late bound as it can cause existing turbofishies to become hard errors/future compat lints.
Many t-types members have expressed interest in wanting more parameters to be late bound. We cannot do so if making something late bound is going to break code that many would expect to work (judging by the future compat lint issue many people do expect to be able to turbofish late bound parameters).
Interactions with late bound type/const parameters
If we were to make some type/const parameters late bound we would definitely not want to disallow turbofishing them as it presumably(?) would break a Tonne of code.
While lifetimes do differ from type/consts in some ways I(BoxyUwU) do not believe there is any justification for why it would make sense to allow turbofishing late bound type/const parameters but not late bound lifetimes.
Removing the hard error/fcw
From reasons above it seems reasonable that we may want to remove the hard error and fcw (removing the errors/fcw is definitely a blocker for making more things late bound).
example behaviour:
fn late<'a>(a: &'a ()) -> &'a () { a } fn accepts_fn(_: impl for<'a> Fn(&'a ()) -> &'a ()) {} fn accepts_fn_2(_: impl Fn(&'static ()) -> &'static ()) {} fn main() { let f = late::<'static>; accepts_fn(f); //~ error: `f` doesn't implement `for<'a> Fn(&'a ()) -> &'a ()` accepts_fn_2(f) // works accepts_fn(late) // works }
one potential complication is that we would want a way to specify a generic argument to a function without having to specify arguments for all previous parameters. i.e. ideally you could write the following code somehow.
fn late<'a, 'b>(_: &'a (), _: &'b ()) {} fn accepts_fn(_: impl for<'a> Fn(&'a (), &'static ())) {} fn main() { // a naive implementation would have a `ReInfer` as the subst for `'a` parameter // no longer allowing the FnDef to satisfy the `for<'a> Fn(&'a ()` bound let f = late::<'_, 'static>; accepts_fn(f); }
Maybe we can just special case HIR ty lowering for _/'_ arguments for late bound
parameters somehow and have it not mean the same thing as _ for early bound parameters.
Regardless I think we would need a solution that would allow writing the above code even
if it was done by some new syntax such as having to write late::<k#no_argument, 'static>
(naturally k#no_argument would only make sense as an argument to late bound parameters).
The ty module: representing types
ty::Tyrustc_hir::Tyvsty::Tyty::Tyimplementation- Allocating and working with types
- Comparing types
ty::TyKindVariants- Import conventions
- Type errors
The ty module defines how the Rust compiler represents types internally. It also defines the
typing context (tcx or TyCtxt), which is the central data structure in the compiler.
ty::Ty
When we talk about how rustc represents types, we usually refer to a type called Ty . There are
quite a few modules and types for Ty in the compiler (Ty documentation).
The specific Ty we are referring to is rustc_middle::ty::Ty (and not
rustc_hir::Ty). The distinction is important, so we will discuss it first before going
into the details of ty::Ty.
rustc_hir::Ty vs ty::Ty
The HIR in rustc can be thought of as the high-level intermediate representation. It is more or less the AST (see this chapter) as it represents the syntax that the user wrote, and is obtained after parsing and some desugaring. It has a representation of types, but in reality it reflects more of what the user wrote, that is, what they wrote so as to represent that type.
In contrast, ty::Ty represents the semantics of a type, that is, the meaning of what the user
wrote. For example, rustc_hir::Ty would record the fact that a user used the name u32 twice
in their program, but the ty::Ty would record the fact that both usages refer to the same type.
Example: fn foo(x: u32) → u32 { x }
In this function, we see that u32 appears twice. We know
that that is the same type,
i.e. the function takes an argument and returns an argument of the same type,
but from the point of view of the HIR,
there would be two distinct type instances because these
are occurring in two different places in the program.
That is, they have two different Spans (locations).
Example: fn foo(x: &u32) -> &u32
In addition, HIR might have information left out. This type
&u32 is incomplete, since in the full Rust type there is actually a lifetime, but we didn’t need
to write those lifetimes. There are also some elision rules that insert information. The result may
look like fn foo<'a>(x: &'a u32) -> &'a u32.
In the HIR level, these things are not spelled out and you can say the picture is rather incomplete.
However, at the ty::Ty level, these details are added and it is complete. Moreover, we will have
exactly one ty::Ty for a given type, like u32, and that ty::Ty is used for all u32s in the
whole program, not a specific usage, unlike rustc_hir::Ty.
Here is a summary:
rustc_hir::Ty | ty::Ty |
|---|---|
| Describe the syntax of a type: what the user wrote (with some desugaring). | Describe the semantics of a type: the meaning of what the user wrote. |
Each rustc_hir::Ty has its own spans corresponding to the appropriate place in the program. | Doesn’t correspond to a single place in the user’s program. |
rustc_hir::Ty has generics and lifetimes; however, some of those lifetimes are special markers like LifetimeName::Implicit. | ty::Ty has the full type, including generics and lifetimes, even if the user left them out |
fn foo(x: u32) → u32 { } - Two rustc_hir::Ty representing each usage of u32, each has its own Spans, and rustc_hir::Ty doesn’t tell us that both are the same type | fn foo(x: u32) → u32 { } - One ty::Ty for all instances of u32 throughout the program, and ty::Ty tells us that both usages of u32 mean the same type. |
fn foo(x: &u32) -> &u32) - Two rustc_hir::Ty again. Lifetimes for the references show up in the rustc_hir::Tys using a special marker, LifetimeName::Implicit. | fn foo(x: &u32) -> &u32)- A single ty::Ty. The ty::Ty has the hidden lifetime param. |
Order
HIR is built directly from the AST, so it happens before any ty::Ty is produced. After
HIR is built, some basic type inference and type checking is done. During the type inference, we
figure out what the ty::Ty of everything is and we also check if the type of something is
ambiguous. The ty::Ty is then used for type checking while making sure everything has the
expected type. The hir_ty_lowering module is where the code responsible for
lowering a rustc_hir::Ty to a ty::Ty is located. The main routine used is lower_ty.
This occurs during the type-checking phase, but also in other parts of the compiler that want to ask
questions like "what argument types does this function expect?"
How semantics drive the two instances of Ty
You can think of HIR as the perspective of the type information that assumes the least. We assume two things are distinct until they are proven to be the same thing. In other words, we know less about them, so we should assume less about them.
They are syntactically two strings: "u32" at line N column 20 and "u32" at line N column 35. We
don’t know that they are the same yet. So, in the HIR we treat them as if they are different. Later,
we determine that they semantically are the same type and that’s the ty::Ty we use.
Consider another example: fn foo<T>(x: T) -> u32. Suppose that someone invokes foo::<u32>(0).
This means that T and u32 (in this invocation) actually turns out to be the same type, so we
would eventually end up with the same ty::Ty in the end, but we have distinct rustc_hir::Ty.
(This is a bit over-simplified, though, since during type checking, we would check the function
generically and would still have a T distinct from u32. Later, when doing code generation,
we would always be handling "monomorphized" (fully substituted) versions of each function,
and hence we would know what T represents (and specifically that it is u32).)
Here is one more example:
#![allow(unused)] fn main() { mod a { type X = u32; pub fn foo(x: X) -> u32 { 22 } } mod b { type X = i32; pub fn foo(x: X) -> i32 { x } } }
Here the type X will vary depending on context, clearly. If you look at the rustc_hir::Ty,
you will get back that X is an alias in both cases (though it will be mapped via name resolution
to distinct aliases). But if you look at the ty::Ty signature, it will be either fn(u32) -> u32
or fn(i32) -> i32 (with type aliases fully expanded).
ty::Ty implementation
rustc_middle::ty::Ty is actually a wrapper around
Interned<WithCachedTypeInfo<TyKind>>.
You can ignore Interned in general; you will basically never access it explicitly.
We always hide them within Ty and skip over it via Deref impls or methods.
TyKind is a big enum
with variants to represent many different Rust types
(e.g. primitives, references, algebraic data types, generics, lifetimes, etc).
WithCachedTypeInfo has a few cached values like flags and outer_exclusive_binder. They
are convenient hacks for efficiency and summarize information about the type that we may want to
know, but they don’t come into the picture as much here. Finally, Interned allows
the ty::Ty to be a thin pointer-like
type. This allows us to do cheap comparisons for equality, along with the other
benefits of interning.
Allocating and working with types
To allocate a new type, you can use the various new_* methods defined on
Ty.
These have names
that correspond mostly to the various kinds of types. For example:
let array_ty = Ty::new_array_with_const_len(tcx, ty, count);
These methods all return a Ty<'tcx> – note that the lifetime you get back is the lifetime of the
arena that this tcx has access to. Types are always canonicalized and interned (so we never
allocate exactly the same type twice).
You can also find various common types in the tcx itself by accessing its fields:
tcx.types.bool, tcx.types.char, etc. (See CommonTypes for more.)
Comparing types
Because types are interned, it is possible to compare them for equality efficiently using ==
– however, this is almost never what you want to do unless you happen to be hashing and looking
for duplicates. This is because often in Rust there are multiple ways to represent the same type,
particularly once inference is involved.
For example, the type {integer} (ty::Infer(ty::IntVar(..)) an integer inference variable,
the type of an integer literal like 0) and u8 (ty::UInt(..)) should often be treated as
equal when testing whether they can be assigned to each other (which is a common operation in
diagnostics code). == on them will return false though, since they are different types.
The simplest way to compare two types correctly requires an inference context (infcx).
If you have one, you can use infcx.can_eq(param_env, ty1, ty2)
to check whether the types can be made equal.
This is typically what you want to check during diagnostics, which is concerned with questions such
as whether two types can be assigned to each other, not whether they're represented identically in
the compiler's type-checking layer.
When working with an inference context, you have to be careful to ensure that potential inference variables inside the types actually belong to that inference context. If you are in a function that has access to an inference context already, this should be the case. Specifically, this is the case during HIR type checking or MIR borrow checking.
Another consideration is normalization. Two types may actually be the same, but one is behind an
associated type. To compare them correctly, you have to normalize the types first. This is
primarily a concern during HIR type checking and with all types from a TyCtxt query
(for example from tcx.type_of()).
When a FnCtxt or an ObligationCtxt is available during type checking, .normalize(ty)
should be used on them to normalize the type. After type checking, diagnostics code can use
tcx.normalize_erasing_regions(ty).
There are also cases where using == on Ty is fine. This is for example the case in late lints
or after monomorphization, since type checking has been completed, meaning all inference variables
are resolved and all regions have been erased. In these cases, if you know that inference variables
or normalization won't be a concern, #[allow] or #[expect]ing the lint is recommended.
When diagnostics code does not have access to an inference context, it should be threaded through the function calls if one is available in some place (like during type checking).
If no inference context is available at all, then one can be created as described in
type-inference. But this is only useful when the involved types (for example, if
they came from a query like tcx.type_of()) are actually substituted with fresh
inference variables using fresh_args_for_item. This can be used to answer questions
like "can Vec<T> for any T be unified with Vec<u32>?".
ty::TyKind Variants
Note: TyKind is NOT the functional programming concept of Kind.
Whenever working with a Ty in the compiler, it is common to match on the kind of type:
fn foo(x: Ty<'tcx>) {
match x.kind {
...
}
}
The kind field is of type TyKind<'tcx>, which is an enum defining all of the different kinds of
types in the compiler.
N.B. inspecting the
kindfield on types during type inference can be risky, as there may be inference variables and other things to consider, or sometimes types are not yet known and will become known later.
There are a lot of related types, and we’ll cover them in time (e.g regions/lifetimes, “substitutions”, etc).
There are many variants on the TyKind enum, which you can see by looking at its
documentation. Here is a sampling:
- Algebraic Data Types (ADTs) An algebraic data type is a
struct,enumorunion. Under the hood,struct,enumandunionare actually implemented the same way: they are allty::TyKind::Adt. It’s basically a user defined type. We will talk more about these later. - Foreign Corresponds to
extern type T. - Str Is the type str. When the user writes
&str,Stris the how we represent thestrpart of that type. - Slice Corresponds to
[T]. - Array Corresponds to
[T; n]. - RawPtr Corresponds to
*mut Tor*const T. - Ref
Refstands for safe references,&'a mut Tor&'a T.Refhas some associated parts, likeTy<'tcx>which is the type that the reference references.Region<'tcx>is the lifetime or region of the reference andMutabilityif the reference is mutable or not. - Param Represents a type parameter (e.g. the
TinVec<T>). - Error Represents a type error somewhere so that we can print better diagnostics. We will discuss this more later.
- And many more...
Import conventions
Although there is no hard and fast rule, the ty module tends to be used like so:
use ty::{self, Ty, TyCtxt};
In particular, since they are so common, the Ty and TyCtxt types are imported directly. Other
types are often referenced with an explicit ty:: prefix (e.g. ty::TraitRef<'tcx>). But some
modules choose to import a larger or smaller set of names explicitly.
Type errors
There is a TyKind::Error that is produced when the user makes a type error. The idea is that
we would propagate this type and suppress other errors that come up due to it so as not to overwhelm
the user with cascading compiler error messages.
There is an important invariant for TyKind::Error. The compiler should
never produce Error unless we know that an error has already been
reported to the user. This is usually
because (a) you just reported it right there or (b) you are propagating an existing Error type (in
which case the error should've been reported when that error type was produced).
It's important to maintain this invariant because the whole point of the Error type is to suppress
other errors -- i.e., we don't report them. If we were to produce an Error type without actually
emitting an error to the user, then this could cause later errors to be suppressed, and the
compilation might inadvertently succeed!
Sometimes there is a third case. You believe that an error has been reported, but you believe it
would've been reported earlier in the compilation, not locally. In that case, you can create a
"delayed bug" with delayed_bug or span_delayed_bug. This will make a note that you expect
compilation to yield an error -- if however compilation should succeed, then it will trigger a
compiler bug report.
For added safety, it's not actually possible to produce a TyKind::Error value
outside of rustc_middle::ty; there is a private member of
TyKind::Error that prevents it from being constructable elsewhere. Instead,
one should use the Ty::new_error or
Ty::new_error_with_message methods. These methods either take an ErrorGuaranteed
or call span_delayed_bug before returning an interned Ty of kind Error. If you
were already planning to use span_delayed_bug, then you can just pass the
span and message to ty_error_with_message instead to avoid
a redundant delayed bug.
ADTs and Generic Arguments
The term ADT stands for "Algebraic data type", in rust this refers to a struct, enum, or union.
ADTs Representation
Let's consider the example of a type like MyStruct<u32>, where MyStruct is defined like so:
struct MyStruct<T> { x: u8, y: T }
The type MyStruct<u32> would be an instance of TyKind::Adt:
Adt(&'tcx AdtDef, GenericArgs<'tcx>)
// ------------ ---------------
// (1) (2)
//
// (1) represents the `MyStruct` part
// (2) represents the `<u32>`, or "substitutions" / generic arguments
There are two parts:
- The
AdtDefreferences the struct/enum/union but without the values for its type parameters. In our example, this is theMyStructpart without the argumentu32. (Note that in the HIR, structs, enums and unions are represented differently, but inty::Ty, they are all represented usingTyKind::Adt.) - The
GenericArgsis a list of values that are to be substituted for the generic parameters. In our example ofMyStruct<u32>, we would end up with a list like[u32]. We’ll dig more into generics and substitutions in a little bit.
AdtDef and DefId
For every type defined in the source code, there is a unique DefId (see this
chapter). This includes ADTs and generics. In the MyStruct<T>
definition we gave above, there are two DefIds: one for MyStruct and one for T. Notice that
the code above does not generate a new DefId for u32 because it is not defined in that code (it
is only referenced).
AdtDef is more or less a wrapper around DefId with lots of useful helper methods. There is
essentially a one-to-one relationship between AdtDef and DefId. You can get the AdtDef for a
DefId with the tcx.adt_def(def_id) query. AdtDefs are all interned, as shown
by the 'tcx lifetime.
Question: Why not substitute “inside” the AdtDef?
Recall that we represent a generic struct with (AdtDef, args). So why bother with this scheme?
Well, the alternate way we could have chosen to represent types would be to always create a new,
fully-substituted form of the AdtDef where all the types are already substituted. This seems like
less of a hassle. However, the (AdtDef, args) scheme has some advantages over this.
First, (AdtDef, args) scheme has an efficiency win:
struct MyStruct<T> {
... 100s of fields ...
}
// Want to do: MyStruct<A> ==> MyStruct<B>
in an example like this, we can instantiate MyStruct<A> as MyStruct<B> (and so on) very cheaply,
by just replacing the one reference to A with B. But if we eagerly instantiated all the fields,
that could be a lot more work because we might have to go through all of the fields in the AdtDef
and update all of their types.
A bit more deeply, this corresponds to structs in Rust being nominal types — which means that they are defined by their name (and that their contents are then indexed from the definition of that name, and not carried along “within” the type itself).
The GenericArgs type
Given a generic type MyType<A, B, …>, we have to store the list of generic arguments for MyType.
In rustc this is done using GenericArgs. GenericArgs is a thin pointer to a slice of GenericArg representing a list of generic arguments for a generic item. For example, given a struct HashMap<K, V> with two type parameters, K and V, the GenericArgs used to represent the type HashMap<i32, u32> would be represented by &'tcx [tcx.types.i32, tcx.types.u32].
GenericArg is conceptually an enum with three variants, one for type arguments, one for const arguments and one for lifetime arguments.
In practice that is actually represented by GenericArgKind and GenericArg is a more space efficient version that has a method to
turn it into a GenericArgKind.
The actual GenericArg struct stores the type, lifetime or const as an interned pointer with the discriminant stored in the lower 2 bits.
Unless you are working with the GenericArgs implementation specifically, you should generally not have to deal with GenericArg and instead
make use of the safe GenericArgKind abstraction obtainable via the GenericArg::unpack() method.
In some cases you may have to construct a GenericArg, this can be done via Ty/Const/Region::into() or GenericArgKind::pack.
// An example of unpacking and packing a generic argument.
fn deal_with_generic_arg<'tcx>(generic_arg: GenericArg<'tcx>) -> GenericArg<'tcx> {
// Unpack a raw `GenericArg` to deal with it safely.
let new_generic_arg: GenericArgKind<'tcx> = match generic_arg.unpack() {
GenericArgKind::Type(ty) => { /* ... */ }
GenericArgKind::Lifetime(lt) => { /* ... */ }
GenericArgKind::Const(ct) => { /* ... */ }
};
// Pack the `GenericArgKind` to store it in a generic args list.
new_generic_arg.pack()
}
So pulling it all together:
struct MyStruct<T>(T);
type Foo = MyStruct<u32>
For the MyStruct<U> written in the Foo type alias, we would represent it in the following way:
- There would be an
AdtDef(and correspondingDefId) forMyStruct. - There would be a
GenericArgscontaining the list[GenericArgKind::Type(Ty(u32))] - And finally a
TyKind::Adtwith theAdtDefandGenericArgslisted above.
Parameter Ty/Const/Regions
When inside of generic items, types can be written that use in scope generic parameters, for example fn foo<'a, T>(_: &'a Vec<T>). In this specific case
the &'a Vec<T> type would be represented internally as:
TyKind::Ref(
RegionKind::LateParam(DefId(foo), DefId(foo::'a), "'a"),
TyKind::Adt(Vec, &[TyKind::Param("T", 0)])
)
There are three separate ways we represent usages of generic parameters:
TyKind::Param/ConstKind::Param/RegionKind::EarlyParamfor early bound generic parameters (note: all type and const parameters are considered early bound, see the chapter on early vs late bound parameters for more information)TyKind::Bound/ConstKind::Bound/RegionKind::Boundfor references to parameters introduced via higher ranked bounds or higher ranked types i.e.for<'a> fn(&'a u32)orfor<'a> T: Trait<'a>. This will be discussed in the chapter onBinders.RegionKind::LateParamfor late bound lifetime parameters,LateParamwill be discussed in the chapter on instantiatingBinders.
This chapter will only cover TyKind::Param ConstKind::Param and RegionKind::EarlyParam.
Ty/Const Parameters
As TyKind::Param and ConstKind::Param are implemented identically this section will only refer to TyKind::Param for simplicity. However
you should keep in mind that everything here also is true of ConstKind::Param
Each TyKind::Param contains two things: the name of the parameter and an index.
See the following concrete example of a usage of TyKind::Param:
struct Foo<T>(Vec<T>);
The Vec<T> type is represented as TyKind::Adt(Vec, &[GenericArgKind::Type(Param("T", 0))]).
The name is somewhat self explanatory, it's the name of the type parameter. The index of the type parameter is an integer indicating its order in the list of generic parameters in scope (note: this includes parameters defined on items on outer scopes than the item the parameter is defined on). Consider the following examples:
struct Foo<A, B> {
// A would have index 0
// B would have index 1
.. // some fields
}
impl<X, Y> Foo<X, Y> {
fn method<Z>() {
// inside here, X, Y and Z are all in scope
// X has index 0
// Y has index 1
// Z has index 2
}
}
Concretely given the ty::Generics for the item the parameter is defined on, if the index is 2 then starting from the root parent, it will be the third parameter to be introduced. For example in the above example, Z has index 2 and is the third generic parameter to be introduced, starting from the impl block.
The index fully defines the Ty and is the only part of TyKind::Param that matters for reasoning about the code we are compiling.
Generally we do not care what the name is and only use the index is included for diagnostics and debug logs as otherwise it would be
incredibly difficult to understand the output, i.e. Vec<Param(0)>: Sized vs Vec<T>: Sized. In debug output, parameter types are
often printed out as {name}/#{index}, for example in the function foo if we were to debug print Vec<T> it would be written as Vec<T/#0>.
An alternative representation would be to only have the name, however using an index is more efficient as it means we can index into GenericArgs when instantiating generic parameters with some arguments. We would otherwise have to store GenericArgs as a HashMap<Symbol, GenericArg> and do a hashmap lookup everytime we used a generic item.
In theory an index would also allow for having multiple distinct parameters that use the same name, e.g.
impl<A> Foo<A> { fn bar<A>() { .. } }.
The rules against shadowing make this difficult but those language rules could change in the future.
Lifetime parameters
In contrast to Ty/Const's Param singular Param variant, lifetimes have two variants for representing region parameters: RegionKind::EarlyParam and RegionKind::LateParam. The reason for this is due to function's distinguishing between early and late bound parameters which is discussed in an earlier chapter (see link).
RegionKind::EarlyParam is structured identically to Ty/Const's Param variant, it is simply a u32 index and a Symbol. For lifetime parameters defined on non-function items we always use ReEarlyParam. For functions we use ReEarlyParam for any early bound parameters and ReLateParam for any late bound parameters. Note that just like Ty and Const params we often debug format them as 'SYMBOL/#INDEX, see for example:
// This function would have its signature represented as:
//
// ```
// fn(
// T/#2,
// Ref('a/#0, Ref(ReLateParam(...), u32))
// ) -> Ref(ReLateParam(...), u32)
// ```
fn foo<'a, 'b, T: 'a>(one: T, two: &'a &'b u32) -> &'b u32 {
...
}
RegionKind::LateParam will be discussed more in the chapter on instantiating binders.
EarlyBinder and instantiating parameters
Given an item that introduces a generic parameter T, whenever we refer to types inside of foo (i.e. the return type or argument types) from outside of foo we must take care to handle the generic parameters defined on foo. As an example:
fn foo<T, U>(a: T, _b: U) -> T { a }
fn main() {
let c = foo::<i32, u128>(1, 2);
}
When type checking main we cannot just naively look at the return type of foo and assign the type T to the variable c, The function main does not define any generic parameters, T is completely meaningless in this context. More generally whenever an item introduces (binds) generic parameters, when accessing types inside the item from outside, the generic parameters must be instantiated with values from the outer item.
In rustc we track this via the EarlyBinder type, the return type of foo is represented as an EarlyBinder<Ty> with the only way to access Ty being to provide arguments for any generic parameters Ty might be using. This is implemented via the EarlyBinder::instantiate method which discharges the binder returning the inner value with all the generic parameters replaced by the provided arguments.
To go back to our example, when type checking main the return type of foo would be represented as EarlyBinder(T/#0). Then, because we called the function with i32, u128 for the generic arguments, we would call EarlyBinder::instantiate on the return type with [i32, u128] for the args. This would result in an instantiated return type of i32 that we can use as the type of the local c.
Here are some more examples:
fn foo<T>() -> Vec<(u32, T)> { Vec::new() }
fn bar() {
// the return type of `foo` before instantiating it would be:
// `EarlyBinder(Adt(Vec, &[Tup(&[u32, T/#=0])]))`
// we then instantiate the binder with `[u64]` resulting in the type:
// `Adt(Vec, &[Tup(&[u32, u64])])`
let a = foo::<u64>();
}
struct Foo<A, B> {
x: Vec<A>,
..
}
fn bar(foo: Foo<u32, f32>) {
// the type of `foo`'s `x` field before instantiating it would be:
// `EarlyBinder(Vec<A/#0>)`
// we then instantiate the binder with `[u32, f32]` as those are the
// generic arguments to the `Foo` struct. This results in a type of:
// `Vec<u32>`
let y = foo.x;
}
In the compiler the instantiate call for this is done in FieldDef::ty (src), at some point during type checking bar we will wind up calling FieldDef::ty(x, &[u32, f32]) in order to obtain the type of foo.x.
Note on indices: It is possible for the indices in Param to not match with what the EarlyBinder binds. For
example, the index could be out of bounds or it could be the index of a lifetime when we were expecting a type.
These sorts of errors would be caught earlier in the compiler when translating from a rustc_hir::Ty to a ty::Ty.
If they occur later, that is a compiler bug.
As mentioned previously when outside of an item, it is important to instantiate the EarlyBinder with generic arguments before accessing the value inside, but the setup for when we are conceptually inside of the binder already is a bit different.
For example:
#![allow(unused)] fn main() { impl<T> Trait for Vec<T> { fn foo(&self, b: Self) {} } }
When constructing a Ty to represent the b parameter's type we need to get the type of Self on the impl that we are inside. This can be acquired by calling the type_of query with the impl's DefId, however, this will return a EarlyBinder<Ty> as the impl block binds generic parameters that may have to be discharged if we are outside of the impl.
The EarlyBinder type provides an instantiate_identity function for discharging the binder when you are "already inside of it". This is effectively a more performant version of writing EarlyBinder::instantiate(GenericArgs::identity_for_item(..)). Conceptually this discharges the binder by instantiating it with placeholders in the root universe (we will talk about what this means in the next few chapters). In practice though it simply returns the inner value with no modification taking place.
Binder and Higher ranked regions
Sometimes we define generic parameters not on an item but as part of a type or a where clauses. As an example the type for<'a> fn(&'a u32) or the where clause for<'a> T: Trait<'a> both introduce a generic lifetime named 'a. Currently there is no stable syntax for for<T> or for<const N: usize> but on nightly feature(non_lifetime_binders) feature can be used to write where clauses (but not types) using for<T>/for<const N: usize>.
The for is referred to as a "binder" because it brings new names into scope. In rustc we use the Binder type to track where these parameters are introduced and what the parameters are (i.e. how many and whether they the parameter is a type/const/region). A type such as for<'a> fn(&'a u32) would be
represented in rustc as:
Binder(
fn(&RegionKind::Bound(DebruijnIndex(0), BoundVar(0)) u32) -> (),
&[BoundVariableKind::Region(...)],
)
Usages of these parameters is represented by the RegionKind::Bound (or TyKind::Bound/ConstKind::Bound variants). These bound regions/types/consts are composed of two main pieces of data:
- A DebruijnIndex to specify which binder we are referring to.
- A
BoundVarwhich specifies which of the parameters theBinderintroduces we are referring to. - We also sometimes store some extra information for diagnostics reasons via the
BoundTyKind/BoundRegionKindbut this is not important for type equality or more generally the semantics ofTy. (omitted from the above example)
In debug output (and also informally when talking to eachother) we tend to write these bound variables in the format of ^DebruijnIndex_BoundVar. The above example would instead be written as Binder(fn(&'^0_0), &[BoundVariableKind::Region]). Sometimes when the DebruijnIndex is 0 we just omit it and would write ^0.
Another concrete example, this time a mixture of for<'a> in a where clause and a type:
where
for<'a> Foo<for<'b> fn(&'a &'b T)>: Trait,
This would be represented as
Binder(
Foo<Binder(
fn(&'^1_0 &'^0 T/#0),
[BoundVariableKind::Region(...)]
)>: Trait,
[BoundVariableKind::Region(...)]
)
Note how the '^1_0 refers to the 'a parameter. We use a DebruijnIndex of 1 to refer to the binder one level up from the innermost one, and a var of 0 to refer to the first parameter bound which is 'a. We also use '^0 to refer to the 'b parameter, the DebruijnIndex is 0 (referring to the innermost binder) so we omit it, leaving only the boundvar of 0 referring to the first parameter bound which is 'b.
We did not always explicitly track the set of bound vars introduced by each Binder, this caused a number of bugs (read: ICEs #81193, #79949, #83017). By tracking these explicitly we can assert when constructing higher ranked where clauses/types that there are no escaping bound variables or variables from a different binder. See the following example of an invalid type inside of a binder:
Binder(
fn(&'^1_0 &'^1 T/#0),
&[BoundVariarbleKind::Region(...)],
)
This would cause all kinds of issues as the region '^1_0 refers to a binder at a higher level than the outermost binder i.e. it is an escaping bound var. The '^1 region (also writeable as '^0_1) is also ill formed as the binder it refers to does not introduce a second parameter. Modern day rustc will ICE when constructing this binder due to both of those regions, in the past we would have simply allowed this to work and then ran into issues in other parts of the codebase.
Instantiating Binders
Much like EarlyBinder, when accessing the inside of a Binder we must first discharge it by replacing the bound vars with some other value. This is for much the same reason as with EarlyBinder, types referencing parameters introduced by the Binder do not make any sense outside of that binder, for example:
fn foo<'a>(a: &'a u32) -> &'a u32 {
a
}
fn bar<T>(a: fn(&u32) -> T) -> T {
a(&10)
}
fn main() {
let higher_ranked_fn_ptr = foo as for<'a> fn(&'a u32) -> &'a u32;
let references_bound_vars = bar(higher_ranked_fn_ptr);
}
In this example we are providing an argument of type for<'a> fn(&'^0 u32) -> &'^0 u32 to bar, we do not want to allow T to be inferred to the type &'^0 u32 as it would be rather nonsensical (and likely unsound if we did not happen to ICE, main has no idea what 'a is so how would the borrow checker handle a borrow with lifetime 'a).
Unlike EarlyBinder we typically do not instantiate Binder with some concrete set of arguments from the user, i.e. ['b, 'static] as arguments to a for<'a1, 'a2> fn(&'a1 u32, &'a2 u32). Instead we usually instantiate the binder with inference variables or placeholders.
Instantiating with inference variables
We instantiate binders with inference variables when we are trying to infer a possible instantiation of the binder, e.g. calling higher ranked function pointers or attempting to use a higher ranked where-clause to prove some bound. For example, given the higher_ranked_fn_ptr from the example above, if we were to call it with &10_u32 we would:
- Instantaite the binder with infer vars yielding a signature of
fn(&'?0 u32) -> &'?0 u32) - Equate the type of the provided argument
&10_u32(&'static u32) with the type in the signature,&'?0 u32, inferring'?0 = 'static - The provided arguments were correct as we were successfully able to unify the types of the provided arguments with the types of the arguments in fn ptr signature
As another example of instantiating with infer vars, given some for<'a> T: Trait<'a> where-clause, if we were attempting to prove that T: Trait<'static> holds we would:
- Instantiate the binder with infer vars yielding a where clause of
T: Trait<'?0> - Equate the goal of
T: Trait<'static>with the instantiated where clause, inferring'?0 = 'static - The goal holds because we were successfully able to unify
T: Trait<'static>withT: Trait<'?0>
Instantiating binders with inference variables can be accomplished by using the instantiate_binder_with_fresh_vars method on InferCtxt. Binders should be instantiated with infer vars when we only care about one specific instantiation of the binder, if instead we wish to reason about all possible instantiations of the binder then placeholders should be used instead.
Instantiating with placeholders
Placeholders are very similar to Ty/ConstKind::Param/ReEarlyParam, they represent some unknown type that is only equal to itself. Ty/Const and Region all have a Placeholder variant that is comprised of a Universe and a BoundVar.
The Universe tracks which binder the placeholder originated from, and the BoundVar tracks which parameter on said binder that this placeholder corresponds to. Equality of placeholders is determined solely by whether the universes are equal and the BoundVars are equal. See the chapter on Placeholders and Universes for more information.
When talking with other rustc devs or seeing Debug formatted Ty/Const/Regions, Placeholder will often be written as '!UNIVERSE_BOUNDVARS. For example given some type for<'a> fn(&'a u32, for<'b> fn(&'b &'a u32)), after instantiating both binders (assuming the Universe in the current InferCtxt was U0 beforehand), the type of &'b &'a u32 would be represented as &'!2_0 &!1_0 u32.
When the universe of the placeholder is 0, it will be entirely omitted from the debug output, i.e. !0_2 would be printed as !2. This rarely happens in practice though as we increase the universe in the InferCtxt when instantiating a binder with placeholders so usually the lowest universe placeholders encounterable are ones in U1.
Binders can be instantiated with placeholders via the enter_forall method on InferCtxt. It should be used whenever the compiler should care about any possible instantiation of the binder instead of one concrete instantiation.
Note: in the original example of this chapter it was mentioned that we should not infer a local variable to have type &'^0 u32. This code is prevented from compiling via universes (as explained in the linked chapter)
Why have both RePlaceholder and ReBound?
You may be wondering why we have both of these variants, afterall the data stored in Placeholder is effectively equivalent to that of ReBound: something to track which binder, and an index to track which parameter the Binder introduced.
The main reason for this is that Bound is a more syntactic representation of bound variables wheras Placeholder is a more semantic representation. As a concrete example:
#![allow(unused)] fn main() { impl<'a> Other<'a> for &'a u32 { } impl<T> Trait for T where for<'a> T: Other<'a>, { ... } impl<T> Bar for T where for<'a> &'a T: Trait { ... } }
Given these trait implementations u32: Bar should not hold. &'a u32 only implements Other<'a> when the lifetime of the borrow and the lifetime on the trait are equal. However if we only used ReBound and did not have placeholders it may be easy to accidentally believe that trait bound does hold. To explain this let's walk through an example of trying to prove u32: Bar in a world where rustc did not have placeholders:
- We start by trying to prove
u32: Bar - We find the
impl<T> Bar for Timpl, we would wind up instantiating theEarlyBinderwithu32(note: this is not quite accurate as we first instantiate the binder with an inference variable that we then infer to beu32but that distinction is not super important here) - There is a where clause
for<'a> &'^0 T: Traiton the impl, as we instantiated the early binder withu32we actually have to provefor<'a> &'^0 u32: Trait - We find the
impl<T> Trait for Timpl, we would wind up instantiating theEarlyBinderwith&'^0 u32 - There is a where clause
for<'a> T: Other<'^0>, as we instantiated the early binder with&'^0 u32we actually have to provefor<'a> &'^0 u32: Other<'^0> - We find the
impl<'a> Other<'a> for &'a u32and this impl is enough to prove the bound as the lifetime on the borrow and on the trait are both'^0
This end result is incorrect as we had two separate binders introducing their own generic parameters, the trait bound should have ended up as something like for<'a1, 'a2> &'^1 u32: Other<'^0> which is not satisfied by the impl<'a> Other<'a> for &'a u32.
While in theory we could make this work it would be quite involved and more complex than the current setup, we would have to:
- "rewrite" bound variables to have a higher
DebruijnIndexwhenever instantiating aBinder/EarlyBinderwith aBoundty/const/region - When inferring an inference variable to a bound var, if that bound var is from a binder enterred after creating the infer var, we would have to lower the
DebruijnIndexof the var. - Separately track what binder an inference variable was created inside of, also what the innermost binder it can name parameters from (currently we only have to track the latter)
- When resolving inference variables rewrite any bound variables according to the current binder depth of the infcx
- Maybe more (while writing this list items kept getting added so it seems naive to think this is exhaustive)
Fundamentally all of this complexity is because Bound ty/const/regions have a different representation for a given parameter on a Binder depending on how many other Binders there are between the binder introducing the parameter, and its usage. For example given the following code:
#![allow(unused)] fn main() { fn foo<T>() where for<'a> T: Trait<'a, for<'b> fn(&'b T, &'a u32)> { ... } }
That where clause would be written as:
for<'a> T: Trait<'^0, for<'b> fn(&'^0 T, &'^1_0 u32)>
Despite there being two references to the 'a parameter they are both represented differently: ^0 and ^1_0, due to the fact that the latter usage is nested under a second Binder for the inner function pointer type.
This is in contrast to Placeholder ty/const/regions which do not have this limitation due to the fact that Universes are specific to the current InferCtxt not the usage site of the parameter.
It is trivially possible to instantiate EarlyBinders and unify inference variables with existing Placeholders as no matter what context the Placeholder is in, it will have the same representation. As an example if we were to instantiate the binder on the higher ranked where clause from above, it would be represented like so:
T: Trait<'!1_0, for<'b> fn(&'^0 T, &'!1_0 u32)>
the RePlaceholder representation for both usages of 'a are the same despite one being underneath another Binder.
If we were to then instantiate the binder on the function pointer we would get a type such as:
fn(&'!2_0 T, ^'!1_0 u32)
the RePlaceholder for the 'b parameter is in a higher universe to track the fact that its binder was instantiated after the binder for 'a.
Instantiating with ReLateParam
As discussed in a previous chapter, RegionKind has two variants for representing generic parameters, ReLateParam and ReEarlyParam. ReLateParam is conceptually a Placeholder that is always in the root universe (U0). It is used when instantiating late bound parameters of functions/closures while inside of them. Its actual representation is relatively different from both ReEarlyParam and RePlaceholder:
- A
DefIdfor the item that introduced the late bound generic parameter - A
BoundRegionKindwhich either specifies theDefIdof the generic parameter and its name (via aSymbol), or that this placeholder is representing the anonymous lifetime of aFn/FnMutclosure's self borrow. There is also a variant forBrAnonbut this is not used forReLateParam.
For example, given the following code:
impl Trait for Whatever {
fn foo<'a>(a: &'a u32) -> &'a u32 {
let b: &'a u32 = a;
b
}
}
the lifetime 'a in the type &'a u32 in the function body would be represented as:
ReLateParam(
{impl#0}::foo,
BoundRegionKind::BrNamed({impl#0}::foo::'a, "'a")
)
In this specific case of referencing late bound generic parameters of a function from inside the body this is done implicitly during hir_ty_lowering rather than explicitly when instantiating a Binder somewhere. In some cases however, we do explicitly instantiate a Binder with ReLateParams.
Generally whenever we have a Binder for late bound parameters on a function/closure and we are conceptually inside of the binder already, we use liberate_late_bound_regions to instantiate it with ReLateParams. That makes this operation the Binder equivalent to EarlyBinder's instantiate_identity.
As a concrete example, accessing the signature of a function we are type checking will be represented as EarlyBinder<Binder<FnSig>>. As we are already "inside" of these binders, we would call instantiate_identity followed by liberate_late_bound_regions.
Constants in the type system
Constants used in the type system are represented as ty::Const.
The variants of their const_kind::ConstKind mostly mirror the variants of ty_kind::TyKind
with the two additional variants being ConstKind::Value and ConstKind::Unevaluated.
WithOptConstParam and dealing with the query system
To typecheck constants used in the type system, we have to know their expected type.
For const arguments in type dependent paths, e.g. x.foo::<{ 3 + 4 }>(), we don't know
the expected type for { 3 + 4 } until we are typechecking the containing function.
As we may however have to evaluate that constant during this typecheck, we would get a cycle error. For more details, you can look at this document.
Unevaluated constants
This section talks about what's happening with feature(generic_const_exprs) enabled.
On stable we do not yet supply any generic parameters to anonymous constants,
avoiding most of the issues mentioned here.
Unless a constant is either a simple literal, e.g. [u8; 3] or foo::<{ 'c' }>(),
or a generic parameter, e.g. [u8; N], converting a constant to its ty::Const representation
returns an unevaluated constant. Even fully concrete constants which do not depend on
generic parameters are not evaluated right away.
Anonymous constants are typechecked separately from their containing item, e.g.
#![allow(unused)] fn main() { fn foo<const N: usize>() -> [u8; N + 1] { [0; N + 1] } }
is treated as
#![allow(unused)] fn main() { const ANON_CONST_1<const N: usize> = N + 1; const ANON_CONST_2<const N: usize> = N + 1; fn foo<const N: usize>() -> [u8; ANON_CONST_1::<N>] { [0; ANON_CONST_2::<N>] } }
Unifying constants
For the compiler, ANON_CONST_1 and ANON_CONST_2 are completely different, so
we have to somehow look into unevaluated constants to check whether they should
unify.
For this we use InferCtxt::try_unify_abstract_consts. This builds a custom AST for the two inputs from their THIR. This is then used for the actual comparison.
Lazy normalization for constants
We do not eagerly evaluate constant as they can be used in the where-clauses of their
parent item, for example:
#![allow(unused)] fn main() { #[feature(generic_const_exprs)] fn foo<T: Trait>() where [u8; <T as Trait>::ASSOC + 1]: SomeOtherTrait, {} }
The constant <T as Trait>::ASSOC + 1 depends on the T: Trait bound of
its parents caller bounds, but is also part of another bound itself.
If we were to eagerly evaluate this constant while computing its parents bounds
this would cause a query cycle.
Unused generic arguments of anonymous constants
Anonymous constants inherit the generic parameters of their parent, which is
why the array length in foo<const N: usize>() -> [u8; N + 1] can use N.
Without any manual adjustments, this causes us to include parameters even if the constant doesn't use them in any way. This can cause some interesting errors and breaks some already stable code.
TypeFoldable and TypeFolder
In the previous chapter we discussed instantiating binders. This must involves looking at everything inside of a Early/Binder
to find any usages of the bound vars in order to replace them. Binders can wrap an arbitrary rust type T not just a Ty so
how do we implement the instantiate methods on the Early/Binder types.
The answer is a couple of traits:
TypeFoldable
and
TypeFolder.
TypeFoldableis implemented by types that embed type information. It allows you to recursively process the contents of theTypeFoldableand do stuff to them.TypeFolderdefines what you want to do with the types you encounter while processing theTypeFoldable.
For example, the TypeFolder trait has a method
fold_ty
that takes a type as input and returns a new type as a result. TypeFoldable invokes the
TypeFolder fold_foo methods on itself, giving the TypeFolder access to its contents (the
types, regions, etc that are contained within).
You can think of it with this analogy to the iterator combinators we have come to love in rust:
vec.iter().map(|e1| foo(e2)).collect()
// ^^^^^^^^^^^^ analogous to `TypeFolder`
// ^^^ analogous to `TypeFoldable`
So to reiterate:
TypeFolderis a trait that defines a “map” operation.TypeFoldableis a trait that is implemented by things that embed types.
In the case of subst, we can see that it is implemented as a TypeFolder:
ArgFolder.
Looking at its implementation, we see where the actual substitutions are happening.
However, you might also notice that the implementation calls this super_fold_with method. What is
that? It is a method of TypeFoldable. Consider the following TypeFoldable type MyFoldable:
struct MyFoldable<'tcx> {
def_id: DefId,
ty: Ty<'tcx>,
}
The TypeFolder can call super_fold_with on MyFoldable if it just wants to replace some of the
fields of MyFoldable with new values. If it instead wants to replace the whole MyFoldable with a
different one, it would call fold_with instead (a different method on TypeFoldable).
In almost all cases, we don’t want to replace the whole struct; we only want to replace ty::Tys in
the struct, so usually we call super_fold_with. A typical implementation that MyFoldable could
have might do something like this:
my_foldable: MyFoldable<'tcx>
my_foldable.subst(..., subst)
impl TypeFoldable for MyFoldable {
fn super_fold_with(&self, folder: &mut impl TypeFolder<'tcx>) -> MyFoldable {
MyFoldable {
def_id: self.def_id.fold_with(folder),
ty: self.ty.fold_with(folder),
}
}
fn super_visit_with(..) { }
}
Notice that here, we implement super_fold_with to go over the fields of MyFoldable and call
fold_with on them. That is, a folder may replace def_id and ty, but not the whole
MyFoldable struct.
Here is another example to put things together: suppose we have a type like Vec<Vec<X>>. The
ty::Ty would look like: Adt(Vec, &[Adt(Vec, &[Param(X)])]). If we want to do subst(X => u32),
then we would first look at the overall type. We would see that there are no substitutions to be
made at the outer level, so we would descend one level and look at Adt(Vec, &[Param(X)]). There
are still no substitutions to be made here, so we would descend again. Now we are looking at
Param(X), which can be substituted, so we replace it with u32. We can’t descend any more, so we
are done, and the overall result is Adt(Vec, &[Adt(Vec, &[u32])]).
One last thing to mention: often when folding over a TypeFoldable, we don’t want to change most
things. We only want to do something when we reach a type. That means there may be a lot of
TypeFoldable types whose implementations basically just forward to their fields’ TypeFoldable
implementations. Such implementations of TypeFoldable tend to be pretty tedious to write by hand.
For this reason, there is a derive macro that allows you to #![derive(TypeFoldable)]. It is
defined
here.
subst In the case of substitutions the actual
folder
is going to be doing the indexing we’ve already mentioned. There we define a Folder and call
fold_with on the TypeFoldable to process yourself. Then
fold_ty
the method that process each type it looks for a ty::Param and for those it replaces it for
something from the list of substitutions, otherwise recursively process the type. To replace it,
calls
ty_for_param
and all that does is index into the list of substitutions with the index of the Param.
The ParamEnv type
Summary
The ParamEnv is used to store information about the environment that we are interacting with the type system from. For example the set of in-scope where-clauses is stored in ParamEnv as it differs between each item whereas the list of user written impls is not stored in the ParamEnv as this does not change for each item.
This chapter of the dev guide covers:
- A high level summary of what a
ParamEnvis and what it is used for - Technical details about what the process of constructing a
ParamEnvinvolves - Guidance about how to acquire a
ParamEnvwhen one is required
Bundling
A useful API on ParamEnv is the and method which allows bundling a value with the ParamEnv. The and method produces a ParamEnvAnd<T> making it clearer that using the inner value is intended to be done in that specific environment.
What is a ParamEnv?
The type system relies on information in the environment in order for it to function correctly. This information is stored in the ParamEnv type and it is important to use the correct ParamEnv when interacting with the type system.
The information represented by ParamEnv is a list of in-scope where-clauses, and a Reveal (see linked docs for more information). A ParamEnv typically corresponds to a specific item's where clauses, some clauses are not explicitly written bounds and instead are implicitly added in predicates_of such as ConstArgHasType or some implied bounds.
A ParamEnv can also be created with arbitrary data that is not derived from a specific item such as in compare_method_predicate_entailment which creates a hybrid ParamEnv consisting of the impl's where clauses and the trait definition's function's where clauses. In most cases ParamEnvs are initially created via the param_env query which returns a ParamEnv derived from the provided item's where clauses.
If we have a function such as:
#![allow(unused)] fn main() { // `foo` would have a `ParamEnv` of: // `[T: Sized, T: Trait, <T as Trait>::Assoc: Clone]` fn foo<T: Trait>() where <T as Trait>::Assoc: Clone, {} }
If we were conceptually inside of foo (for example, type-checking or linting it) we would use this ParamEnv everywhere that we interact with the type system. This would allow things such as normalization (TODO: write a chapter about normalization and link it), evaluating generic constants, and proving where clauses/goals, to rely on T being sized, implementing Trait, etc.
A more concrete example:
#![allow(unused)] fn main() { // `foo` would have a `ParamEnv` of: // `[T: Sized, T: Clone]` fn foo<T: Clone>(a: T) { // when typechecking `foo` we require all the where clauses on `bar` // to hold in order for it to be legal to call. This means we have to // prove `T: Clone`. As we are type checking `foo` we use `foo`'s // environment when trying to check that `T: Clone` holds. // // Trying to prove `T: Clone` with a `ParamEnv` of `[T: Sized, T: Clone]` // will trivially succeed as bound we want to prove is in our environment. requires_clone(a); } }
Or alternatively an example that would not compile:
#![allow(unused)] fn main() { // `foo2` would have a `ParamEnv` of: // `[T: Sized]` fn foo2<T>(a: T) { // When typechecking `foo2` we attempt to prove `T: Clone`. // As we are type checking `foo2` we use `foo2`'s environment // when trying to prove `T: Clone`. // // Trying to prove `T: Clone` with a `ParamEnv` of `[T: Sized]` will // fail as there is nothing in the environment telling the trait solver // that `T` implements `Clone` and there exists no user written impl // that could apply. requires_clone(a); } }
It's very important to use the correct ParamEnv when interacting with the type system as otherwise it can lead to ICEs or things compiling when they shouldn't (or vice versa). See #82159 and #82067 as examples of PRs that changed rustc to use the correct param env to avoid ICE. Determining how to acquire the correct ParamEnv is explained later in this chapter.
How are ParamEnv's constructed internally?
Creating a ParamEnv is more complicated than simply using the list of where clauses defined on an item as written by the user. We need to both elaborate supertraits into the env and fully normalize all aliases. This logic is handled by traits::normalize_param_env_or_error (even though it does not mention anything about elaboration).
Elaborating supertraits
When we have a function such as fn foo<T: Copy>() we would like to be able to prove T: Clone inside of the function as the Copy trait has a Clone supertrait. Constructing a ParamEnv looks at all of the trait bounds in the env and explicitly adds new where clauses to the ParamEnv for any supertraits found on the traits.
A concrete example would be the following function:
#![allow(unused)] fn main() { trait Trait: SuperTrait {} trait SuperTrait: SuperSuperTrait {} // `bar`'s unelaborated `ParamEnv` would be: // `[T: Sized, T: Copy, T: Trait]` fn bar<T: Copy + Trait>(a: T) { requires_impl(a); } fn requires_impl<T: Clone + SuperSuperTrait>(a: T) {} }
If we did not elaborate the env then the requires_impl call would fail to typecheck as we would not be able to prove T: Clone or T: SuperSuperTrait. In practice we elaborate the env which means that bar's ParamEnv is actually:
[T: Sized, T: Copy, T: Clone, T: Trait, T: SuperTrait, T: SuperSuperTrait]
This allows us to prove T: Clone and T: SuperSuperTrait when type checking bar.
The Clone trait has a Sized supertrait however we do not end up with two T: Sized bounds in the env (one for the supertrait and one for the implicitly added T: Sized bound). This is because the elaboration process (implemented via util::elaborate) deduplicates the where clauses to avoid this.
As a side effect this also means that even if no actual elaboration of supertraits takes place, the existing where clauses in the env are also deduplicated. See the following example:
#![allow(unused)] fn main() { trait Trait {} // The unelaborated `ParamEnv` would be: // `[T: Sized, T: Trait, T: Trait]` // but after elaboration it would be: // `[T: Sized, T: Trait]` fn foo<T: Trait + Trait>() {} }
The next-gen trait solver also requires this elaboration to take place.
Normalizing all bounds
In the old trait solver the where clauses stored in ParamEnv are required to be fully normalized or else the trait solver will not function correctly. A concrete example of needing to normalize the ParamEnv is the following:
#![allow(unused)] fn main() { trait Trait<T> { type Assoc; } trait Other { type Bar; } impl<T> Other for T { type Bar = u32; } // `foo`'s unnormalized `ParamEnv` would be: // `[T: Sized, U: Sized, U: Trait<T::Bar>]` fn foo<T, U>(a: U) where U: Trait<<T as Other>::Bar>, { requires_impl(a); } fn requires_impl<U: Trait<u32>>(_: U) {} }
As humans we can tell that <T as Other>::Bar is equal to u32 so the trait bound on U is equivalent to U: Trait<u32>. In practice trying to prove U: Trait<u32> in the old solver in this environment would fail as it is unable to determine that <T as Other>::Bar is equal to u32.
To work around this we normalize ParamEnv's after constructing them so that foo's ParamEnv is actually: [T: Sized, U: Sized, U: Trait<u32>] which means the trait solver is now able to use the U: Trait<u32> in the ParamEnv to determine that the trait bound U: Trait<u32> holds.
This workaround does not work in all cases as normalizing associated types requires a ParamEnv which introduces a bootstrapping problem. We need a normalized ParamEnv in order for normalization to give correct results, but we need to normalize to get that ParamEnv. Currently we normalize the ParamEnv once using the unnormalized param env and it tends to give okay results in practice even though there are some examples where this breaks (example).
In the next-gen trait solver the requirement for all where clauses in the ParamEnv to be fully normalized is not present and so we do not normalize when constructing ParamEnvs.
Which ParamEnv do I use?
When needing a ParamEnv in the compiler there are a few options for obtaining one:
- The correct env is already in scope simply use it (or pass it down the call stack to where you are).
- The
tcx.param_env(def_id)query - Use
ParamEnv::newto construct an env with an arbitrary set of where clauses. Then calltraits::normalize_param_env_or_errorwhich will handle normalizing and elaborating all the where clauses in the env for you. - Creating an empty environment via
ParamEnv::reveal_allorParamEnv::empty
In the large majority of cases a ParamEnv when required already exists somewhere in scope or above in the call stack and should be passed down. A non exhaustive list of places where you might find an existing ParamEnv:
- During typeck
FnCtxthas aparam_envfield - When writing late lints the
LateContexthas aparam_envfield - During well formedness checking the
WfCheckingCtxthas aparam_envfield - The
TypeCheckerused by Mir Typeck has aparam_envfield - In the next-gen trait solver all
Goals have aparam_envfield specifying what environment to prove the goal in - When editing an existing
TypeRelationif it implementsPredicateEmittingRelationthen aparam_envmethod will be available.
Using the param_env query to obtain an env is generally done at the start of some kind of analysis and then passed everywhere that a ParamEnv is required. For example the type checker will create a ParamEnv for the item it is type checking and then pass it around everywhere.
Creating an env from an arbitrary set of where clauses is usually unnecessary and should only be done if the environment you need does not correspond to an actual item in the source code (i.e. compare_method_predicate_entailment as mentioned earlier).
Creating an empty environment via ParamEnv::empty is almost always wrong. There are very few places where we actually know that the environment should be empty. One of the only places where we do actually know this is after monomorphization, however the ParamEnv there should be constructed via ParamEnv::reveal_all instead as at this point we should be able to determine the hidden type of opaque types. Codegen/Post-mono is one of the only places that should be using ParamEnv::reveal_all.
An additional piece of complexity here is specifying the Reveal (see linked docs for explanation of what reveal does) used for the ParamEnv. When constructing a param env using the param_env query it will have Reveal::UserFacing, if Reveal::All is desired then the tcx.param_env_reveal_all_normalized query can be used instead.
The ParamEnv type has a method ParamEnv::with_reveal_all_normalized which converts an existing ParamEnv into one with Reveal::All specified. Where possible the previously mentioned query should be preferred as it is more efficient.
Type inference
- A note on terminology
- Creating an inference context
- Inference variables
- Enforcing equality / subtyping
- "Trying" equality
- Snapshots
- Subtyping obligations
- Region constraints
- Solving region constraints
- Lexical region resolution
Type inference is the process of automatic detection of the type of an expression.
It is what allows Rust to work with fewer or no type annotations, making things easier for users:
fn main() { let mut things = vec![]; things.push("thing"); }
Here, the type of things is inferred to be Vec<&str> because of the value
we push into things.
The type inference is based on the standard Hindley-Milner (HM) type inference algorithm, but extended in various way to accommodate subtyping, region inference, and higher-ranked types.
A note on terminology
We use the notation ?T to refer to inference variables, also called
existential variables.
We use the terms "region" and "lifetime" interchangeably. Both refer to
the 'a in &'a T.
The term "bound region" refers to a region that is bound in a function
signature, such as the 'a in for<'a> fn(&'a u32). A region is
"free" if it is not bound.
Creating an inference context
You create an inference context by doing something like the following:
let infcx = tcx.infer_ctxt().build();
// Use the inference context `infcx` here.
infcx has the type InferCtxt<'tcx>, the same 'tcx lifetime as on
the tcx it was built from.
The tcx.infer_ctxt method actually returns a builder, which means
there are some kinds of configuration you can do before the infcx is
created. See InferCtxtBuilder for more information.
Inference variables
The main purpose of the inference context is to house a bunch of inference variables – these represent types or regions whose precise value is not yet known, but will be uncovered as we perform type-checking.
If you're familiar with the basic ideas of unification from H-M type systems, or logic languages like Prolog, this is the same concept. If you're not, you might want to read a tutorial on how H-M type inference works, or perhaps this blog post on unification in the Chalk project.
All told, the inference context stores five kinds of inference variables (as of March 2023):
- Type variables, which come in three varieties:
- General type variables (the most common). These can be unified with any type.
- Integral type variables, which can only be unified with an integral type,
and arise from an integer literal expression like
22. - Float type variables, which can only be unified with a float type, and
arise from a float literal expression like
22.0.
- Region variables, which represent lifetimes, and arise all over the place.
- Const variables, which represent constants.
All the type variables work in much the same way: you can create a new
type variable, and what you get is Ty<'tcx> representing an
unresolved type ?T. Then later you can apply the various operations
that the inferencer supports, such as equality or subtyping, and it
will possibly instantiate (or bind) that ?T to a specific
value as a result.
The region variables work somewhat differently, and are described below in a separate section.
Enforcing equality / subtyping
The most basic operations you can perform in the type inferencer is
equality, which forces two types T and U to be the same. The
recommended way to add an equality constraint is to use the at
method, roughly like so:
infcx.at(...).eq(t, u);
The first at() call provides a bit of context, i.e. why you are
doing this unification, and in what environment, and the eq method
performs the actual equality constraint.
When you equate things, you force them to be precisely equal. Equating
returns an InferResult – if it returns Err(err), then equating
failed, and the enclosing TypeError will tell you what went wrong.
The success case is perhaps more interesting. The "primary" return
type of eq is () – that is, when it succeeds, it doesn't return a
value of any particular interest. Rather, it is executed for its
side-effects of constraining type variables and so forth. However, the
actual return type is not (), but rather InferOk<()>. The
InferOk type is used to carry extra trait obligations – your job is
to ensure that these are fulfilled (typically by enrolling them in a
fulfillment context). See the trait chapter for more background on that.
You can similarly enforce subtyping through infcx.at(..).sub(..). The same
basic concepts as above apply.
"Trying" equality
Sometimes you would like to know if it is possible to equate two
types without error. You can test that with infcx.can_eq (or
infcx.can_sub for subtyping). If this returns Ok, then equality
is possible – but in all cases, any side-effects are reversed.
Be aware, though, that the success or failure of these methods is always
modulo regions. That is, two types &'a u32 and &'b u32 will
return Ok for can_eq, even if 'a != 'b. This falls out from the
"two-phase" nature of how we solve region constraints.
Snapshots
As described in the previous section on can_eq, often it is useful
to be able to do a series of operations and then roll back their
side-effects. This is done for various reasons: one of them is to be
able to backtrack, trying out multiple possibilities before settling
on which path to take. Another is in order to ensure that a series of
smaller changes take place atomically or not at all.
To allow for this, the inference context supports a snapshot method.
When you call it, it will start recording changes that occur from the
operations you perform. When you are done, you can either invoke
rollback_to, which will undo those changes, or else confirm, which
will make them permanent. Snapshots can be nested as long as you follow
a stack-like discipline.
Rather than use snapshots directly, it is often helpful to use the
methods like commit_if_ok or probe that encapsulate higher-level
patterns.
Subtyping obligations
One thing worth discussing is subtyping obligations. When you force
two types to be a subtype, like ?T <: i32, we can often convert those
into equality constraints. This follows from Rust's rather limited notion
of subtyping: so, in the above case, ?T <: i32 is equivalent to ?T = i32.
However, in some cases we have to be more careful. For example, when
regions are involved. So if you have ?T <: &'a i32, what we would do
is to first "generalize" &'a i32 into a type with a region variable:
&'?b i32, and then unify ?T with that (?T = &'?b i32). We then
relate this new variable with the original bound:
&'?b i32 <: &'a i32
This will result in a region constraint (see below) of '?b: 'a.
One final interesting case is relating two unbound type variables,
like ?T <: ?U. In that case, we can't make progress, so we enqueue
an obligation Subtype(?T, ?U) and return it via the InferOk
mechanism. You'll have to try again when more details about ?T or
?U are known.
Region constraints
Regions are inferenced somewhat differently from types. Rather than eagerly unifying things, we simply collect constraints as we go, but make (almost) no attempt to solve regions. These constraints have the form of an "outlives" constraint:
'a: 'b
Actually the code tends to view them as a subregion relation, but it's the same idea:
'b <= 'a
(There are various other kinds of constraints, such as "verifys"; see
the region_constraints module for details.)
There is one case where we do some amount of eager unification. If you have an equality constraint between two regions
'a = 'b
we will record that fact in a unification table. You can then use
opportunistic_resolve_var to convert 'b to 'a (or vice
versa). This is sometimes needed to ensure termination of fixed-point
algorithms.
Solving region constraints
Region constraints are only solved at the very end of typechecking, once all other constraints are known and all other obligations have been proven. There are two ways to solve region constraints right now: lexical and non-lexical. Eventually there will only be one.
An exception here is the leak-check which is used during trait solving
and relies on region constraints containing higher-ranked regions. Region
constraints in the root universe (i.e. not arising from a for<'a>) must
not influence the trait system, as these regions are all erased during
codegen.
To solve lexical region constraints, you invoke
resolve_regions_and_report_errors. This "closes" the region
constraint process and invokes the lexical_region_resolve code. Once
this is done, any further attempt to equate or create a subtyping
relationship will yield an ICE.
The NLL solver (actually, the MIR type-checker) does things slightly
differently. It uses canonical queries for trait solving which use
take_and_reset_region_constraints at the end. This extracts all of the
outlives constraints added during the canonical query. This is required
as the NLL solver must not only know what regions outlive each other,
but also where. Finally, the NLL solver invokes take_region_var_origins,
providing all region variables to the solver.
Lexical region resolution
Lexical region resolution is done by initially assigning each region variable to an empty value. We then process each outlives constraint repeatedly, growing region variables until a fixed-point is reached. Region variables can be grown using a least-upper-bound relation on the region lattice in a fairly straightforward fashion.
Trait resolution (old-style)
This chapter describes the general process of trait resolution and points out some non-obvious things.
Note: This chapter (and its subchapters) describe how the trait solver currently works. However, we are in the process of designing a new trait solver. If you'd prefer to read about that, see this subchapter.
Major concepts
Trait resolution is the process of pairing up an impl with each reference to a trait. So, for example, if there is a generic function like:
fn clone_slice<T:Clone>(x: &[T]) -> Vec<T> { ... }
and then a call to that function:
let v: Vec<isize> = clone_slice(&[1, 2, 3])
it is the job of trait resolution to figure out whether there exists an impl of
(in this case) isize : Clone.
Note that in some cases, like generic functions, we may not be able to
find a specific impl, but we can figure out that the caller must
provide an impl. For example, consider the body of clone_slice:
fn clone_slice<T:Clone>(x: &[T]) -> Vec<T> {
let mut v = Vec::new();
for e in &x {
v.push((*e).clone()); // (*)
}
}
The line marked (*) is only legal if T (the type of *e)
implements the Clone trait. Naturally, since we don't know what T
is, we can't find the specific impl; but based on the bound T:Clone,
we can say that there exists an impl which the caller must provide.
We use the term obligation to refer to a trait reference in need of an impl. Basically, the trait resolution system resolves an obligation by proving that an appropriate impl does exist.
During type checking, we do not store the results of trait selection. We simply wish to verify that trait selection will succeed. Then later, at codegen time, when we have all concrete types available, we can repeat the trait selection to choose an actual implementation, which will then be generated in the output binary.
Overview
Trait resolution consists of three major parts:
-
Selection: Deciding how to resolve a specific obligation. For example, selection might decide that a specific obligation can be resolved by employing an impl which matches the
Selftype, or by using a parameter bound (e.g.T: Trait). In the case of an impl, selecting one obligation can create nested obligations because of where clauses on the impl itself. It may also require evaluating those nested obligations to resolve ambiguities. -
Fulfillment: The fulfillment code is what tracks that obligations are completely fulfilled. Basically it is a worklist of obligations to be selected: once selection is successful, the obligation is removed from the worklist and any nested obligations are enqueued. Fulfillment constrains inference variables.
-
Evaluation: Checks whether obligations holds without constraining any inference variables. Used by selection.
Selection
Selection is the process of deciding whether an obligation can be
resolved and, if so, how it is to be resolved (via impl, where clause, etc).
The main interface is the select() function, which takes an obligation
and returns a SelectionResult. There are three possible outcomes:
-
Ok(Some(selection))– yes, the obligation can be resolved, andselectionindicates how. If the impl was resolved via an impl, thenselectionmay also indicate nested obligations that are required by the impl. -
Ok(None)– we are not yet sure whether the obligation can be resolved or not. This happens most commonly when the obligation contains unbound type variables. -
Err(err)– the obligation definitely cannot be resolved due to a type error or because there are no impls that could possibly apply.
The basic algorithm for selection is broken into two big phases: candidate assembly and confirmation.
Note that because of how lifetime inference works, it is not possible to give back immediate feedback as to whether a unification or subtype relationship between lifetimes holds or not. Therefore, lifetime matching is not considered during selection. This is reflected in the fact that subregion assignment is infallible. This may yield lifetime constraints that will later be found to be in error (in contrast, the non-lifetime-constraints have already been checked during selection and can never cause an error, though naturally they may lead to other errors downstream).
Candidate assembly
TODO: Talk about why we have different candidates, and why it needs to happen in a probe.
Searches for impls/where-clauses/etc that might possibly be used to satisfy the obligation. Each of those is called a candidate. To avoid ambiguity, we want to find exactly one candidate that is definitively applicable. In some cases, we may not know whether an impl/where-clause applies or not – this occurs when the obligation contains unbound inference variables.
The subroutines that decide whether a particular impl/where-clause/etc applies
to a particular obligation are collectively referred to as the process of
matching. For impl candidates ,
this amounts to unifying the impl header (the Self type and the trait arguments)
while ignoring nested obligations. If matching succeeds then we add it
to a set of candidates. There are other rules when assembling candidates for
built-in traits such as Copy, Sized, and CoerceUnsized.
Once this first pass is done, we can examine the set of candidates. If
it is a singleton set, then we are done: this is the only impl in
scope that could possibly apply. Otherwise, we can winnow down the set
of candidates by using where clauses and other conditions. Winnowing uses
evaluate_candidate to check whether the nested obligations may apply.
If this still leaves more than 1 candidate, we use fn candidate_should_be_dropped_in_favor_of
to prefer some candidates over others.
If this reduced set yields a single, unambiguous entry, we're good to go, otherwise the result is considered ambiguous.
Winnowing: Resolving ambiguities
But what happens if there are multiple impls where all the types unify? Consider this example:
trait Get {
fn get(&self) -> Self;
}
impl<T: Copy> Get for T {
fn get(&self) -> T {
*self
}
}
impl<T: Get> Get for Box<T> {
fn get(&self) -> Box<T> {
Box::new(<T>::get(self))
}
}
What happens when we invoke get(&Box::new(1_u16)), for example? In this
case, the Self type is Box<u16> – that unifies with both impls,
because the first applies to all types T, and the second to all
Box<T>. In order for this to be unambiguous, the compiler does a winnowing
pass that considers where clauses
and attempts to remove candidates. In this case, the first impl only
applies if Box<u16> : Copy, which doesn't hold. After winnowing,
then, we are left with just one candidate, so we can proceed.
where clauses
Besides an impl, the other major way to resolve an obligation is via a where clause. The selection process is always given a parameter environment which contains a list of where clauses, which are basically obligations that we can assume are satisfiable. We will iterate over that list and check whether our current obligation can be found in that list. If so, it is considered satisfied. More precisely, we want to check whether there is a where-clause obligation that is for the same trait (or some subtrait) and which can match against the obligation.
Consider this simple example:
trait A1 {
fn do_a1(&self);
}
trait A2 : A1 { ... }
trait B {
fn do_b(&self);
}
fn foo<X:A2+B>(x: X) {
x.do_a1(); // (*)
x.do_b(); // (#)
}
In the body of foo, clearly we can use methods of A1, A2, or B
on variable x. The line marked (*) will incur an obligation X: A1,
while the line marked (#) will incur an obligation X: B. Meanwhile,
the parameter environment will contain two where-clauses: X : A2 and X : B.
For each obligation, then, we search this list of where-clauses. The
obligation X: B trivially matches against the where-clause X: B.
To resolve an obligation X:A1, we would note that X:A2 implies that X:A1.
Confirmation
Confirmation unifies the output type parameters of the trait with the values found in the obligation, possibly yielding a type error.
Suppose we have the following variation of the Convert example in the
previous section:
trait Convert<Target> {
fn convert(&self) -> Target;
}
impl Convert<usize> for isize { ... } // isize -> usize
impl Convert<isize> for usize { ... } // usize -> isize
let x: isize = ...;
let y: char = x.convert(); // NOTE: `y: char` now!
Confirmation is where an error would be reported because the impl specified
that Target would be usize, but the obligation reported char. Hence the
result of selection would be an error.
Note that the candidate impl is chosen based on the Self type, but
confirmation is done based on (in this case) the Target type parameter.
Selection during codegen
As mentioned above, during type checking, we do not store the results of trait
selection. At codegen time, we repeat the trait selection to choose a particular
impl for each method call. This is done using fn codegen_select_candidate.
In this second selection, we do not consider any where-clauses to be in scope
because we know that each resolution will resolve to a particular impl.
One interesting twist has to do with nested obligations. In general, in codegen, we only need to figure out which candidate applies, and we do not care about nested obligations, as these are already assumed to be true. Nonetheless, we do currently fulfill all of them. That is because it can sometimes inform the results of type inference. That is, we do not have the full substitutions in terms of the type variables of the impl available to us, so we must run trait selection to figure everything out.
Higher-ranked trait bounds
One of the more subtle concepts in trait resolution is higher-ranked trait
bounds. An example of such a bound is for<'a> MyTrait<&'a isize>.
Let's walk through how selection on higher-ranked trait references
works.
Basic matching and placeholder leaks
Suppose we have a trait Foo:
#![allow(unused)] fn main() { trait Foo<X> { fn foo(&self, x: X) { } } }
Let's say we have a function want_hrtb that wants a type which
implements Foo<&'a isize> for any 'a:
fn want_hrtb<T>() where T : for<'a> Foo<&'a isize> { ... }
Now we have a struct AnyInt that implements Foo<&'a isize> for any
'a:
struct AnyInt;
impl<'a> Foo<&'a isize> for AnyInt { }
And the question is, does AnyInt : for<'a> Foo<&'a isize>? We want the
answer to be yes. The algorithm for figuring it out is closely related
to the subtyping for higher-ranked types (which is described here
and also in a paper by SPJ. If you wish to understand higher-ranked
subtyping, we recommend you read the paper). There are a few parts:
- Replace bound regions in the obligation with placeholders.
- Match the impl against the placeholder obligation.
- Check for placeholder leaks.
So let's work through our example.
-
The first thing we would do is to replace the bound region in the obligation with a placeholder, yielding
AnyInt : Foo<&'0 isize>(here'0represents placeholder region #0). Note that we now have no quantifiers; in terms of the compiler type, this changes from aty::PolyTraitRefto aTraitRef. We would then create theTraitReffrom the impl, using fresh variables for it's bound regions (and thus gettingFoo<&'$a isize>, where'$ais the inference variable for'a). -
Next we relate the two trait refs, yielding a graph with the constraint that
'0 == '$a. -
Finally, we check for placeholder "leaks" – a leak is basically any attempt to relate a placeholder region to another placeholder region, or to any region that pre-existed the impl match. The leak check is done by searching from the placeholder region to find the set of regions that it is related to in any way. This is called the "taint" set. To pass the check, that set must consist solely of itself and region variables from the impl. If the taint set includes any other region, then the match is a failure. In this case, the taint set for
'0is{'0, '$a}, and hence the check will succeed.
Let's consider a failure case. Imagine we also have a struct
struct StaticInt;
impl Foo<&'static isize> for StaticInt;
We want the obligation StaticInt : for<'a> Foo<&'a isize> to be
considered unsatisfied. The check begins just as before. 'a is
replaced with a placeholder '0 and the impl trait reference is instantiated to
Foo<&'static isize>. When we relate those two, we get a constraint
like 'static == '0. This means that the taint set for '0 is {'0, 'static}, which fails the leak check.
TODO: This is because 'static is not a region variable but is in the
taint set, right?
Higher-ranked trait obligations
Once the basic matching is done, we get to another interesting topic:
how to deal with impl obligations. I'll work through a simple example
here. Imagine we have the traits Foo and Bar and an associated impl:
#![allow(unused)] fn main() { trait Foo<X> { fn foo(&self, x: X) { } } trait Bar<X> { fn bar(&self, x: X) { } } impl<X,F> Foo<X> for F where F : Bar<X> { } }
Now let's say we have an obligation Baz: for<'a> Foo<&'a isize> and we match
this impl. What obligation is generated as a result? We want to get
Baz: for<'a> Bar<&'a isize>, but how does that happen?
After the matching, we are in a position where we have a placeholder
substitution like X => &'0 isize. If we apply this substitution to the
impl obligations, we get F : Bar<&'0 isize>. Obviously this is not
directly usable because the placeholder region '0 cannot leak out of
our computation.
What we do is to create an inverse mapping from the taint set of '0
back to the original bound region ('a, here) that '0 resulted
from. (This is done in higher_ranked::plug_leaks). We know that the
leak check passed, so this taint set consists solely of the placeholder
region itself plus various intermediate region variables. We then walk
the trait-reference and convert every region in that taint set back to
a late-bound region, so in this case we'd wind up with
Baz: for<'a> Bar<&'a isize>.
Caching and subtle considerations therewith
In general, we attempt to cache the results of trait selection. This is a somewhat complex process. Part of the reason for this is that we want to be able to cache results even when all the types in the trait reference are not fully known. In that case, it may happen that the trait selection process is also influencing type variables, so we have to be able to not only cache the result of the selection process, but replay its effects on the type variables.
An example
The high-level idea of how the cache works is that we first replace
all unbound inference variables with placeholder versions. Therefore,
if we had a trait reference usize : Foo<$t>, where $t is an unbound
inference variable, we might replace it with usize : Foo<$0>, where
$0 is a placeholder type. We would then look this up in the cache.
If we found a hit, the hit would tell us the immediate next step to
take in the selection process (e.g. apply impl #22, or apply where
clause X : Foo<Y>).
On the other hand, if there is no hit, we need to go through the selection process from scratch. Suppose, we come to the conclusion that the only possible impl is this one, with def-id 22:
impl Foo<isize> for usize { ... } // Impl #22
We would then record in the cache usize : Foo<$0> => ImplCandidate(22). Next
we would confirm ImplCandidate(22), which would (as a side-effect) unify
$t with isize.
Now, at some later time, we might come along and see a usize : Foo<$u>. When replaced with a placeholder, this would yield usize : Foo<$0>, just as
before, and hence the cache lookup would succeed, yielding
ImplCandidate(22). We would confirm ImplCandidate(22) which would
(as a side-effect) unify $u with isize.
Where clauses and the local vs global cache
One subtle interaction is that the results of trait lookup will vary
depending on what where clauses are in scope. Therefore, we actually
have two caches, a local and a global cache. The local cache is
attached to the ParamEnv, and the global cache attached to the
tcx. We use the local cache whenever the result might depend on the
where clauses that are in scope. The determination of which cache to
use is done by the method pick_candidate_cache in select.rs. At
the moment, we use a very simple, conservative rule: if there are any
where-clauses in scope, then we use the local cache. We used to try
and draw finer-grained distinctions, but that led to a series of
annoying and weird bugs like #22019 and #18290. This simple rule seems
to be pretty clearly safe and also still retains a very high hit rate
(~95% when compiling rustc).
TODO: it looks like pick_candidate_cache no longer exists. In
general, is this section still accurate at all?
Implied bounds
We currently add implied region bounds to avoid explicit annotations. e.g.
fn foo<'a, T>(x: &'a T) can freely assume that T: 'a holds without specifying it.
There are two kinds of implied bounds: explicit and implicit. Explicit implied bounds
get added to the fn predicates_of of the relevant item while implicit ones are
handled... well... implicitly.
explicit implied bounds
The explicit implied bounds are computed in fn inferred_outlives_of. Only ADTs and
lazy type aliases have explicit implied bounds which are computed via a fixpoint algorithm
in the fn inferred_outlives_crate query.
We use fn insert_required_predicates_to_be_wf on all fields of all ADTs in the crate.
This function computes the outlives bounds for each component of the field using a
separate implementation.
For ADTs, trait objects, and associated types the initially required predicates are
computed in fn check_explicit_predicates. This simply uses fn explicit_predicates_of
without elaborating them.
Region predicates are added via fn insert_outlives_predicate. This function takes
an outlives predicate, decomposes it and adds the components as explicit predicates only
if the outlived region is a region parameter. It does not add 'static requirements.
implicit implied bounds
As we are unable to handle implications in binders yet, we cannot simply add the outlives requirements of impls and functions as explicit predicates.
using implicit implied bounds as assumptions
These bounds are not added to the ParamEnv of the affected item itself. For lexical
region resolution they are added using fn OutlivesEnvironment::with_bounds.
Similarly,during MIR borrowck we add them using
fn UniversalRegionRelationsBuilder::add_implied_bounds.
We add implied bounds for the function signature and impl header in MIR borrowck.
Outside of MIR borrowck we add the outlives requirements for the types returned by the
fn assumed_wf_types query.
The assumed outlives constraints for implicit bounds are computed using the
fn implied_outlives_bounds query. This directly
extracts the required outlives bounds from fn wf::obligations.
MIR borrowck adds the outlives constraints for both the normalized and unnormalized types, lexical region resolution only uses the unnormalized types.
proving implicit implied bounds
As the implicit implied bounds are not included in fn predicates_of we have to
separately make sure they actually hold. We generally handle this by checking that
all used types are well formed by emitting WellFormed predicates.
We cannot emit WellFormed predicates when instantiating impls, as this would result
in - currently often inductive - trait solver cycles. We also do not emit constraints
involving higher ranked regions as we're lacking the implied bounds from their binder.
This results in multiple unsoundnesses:
- by using subtyping: #25860
- by using super trait upcasting for a higher ranked trait bound: #84591
- by being able to normalize a projection when using an impl while not being able to normalize it when checking the impl: #100051
Specialization
TODO: where does Chalk fit in? Should we mention/discuss it here?
Defined in the specialize module.
The basic strategy is to build up a specialization graph during coherence checking (coherence checking looks for overlapping impls). Insertion into the graph locates the right place to put an impl in the specialization hierarchy; if there is no right place (due to partial overlap but no containment), you get an overlap error. Specialization is consulted when selecting an impl (of course), and the graph is consulted when propagating defaults down the specialization hierarchy.
You might expect that the specialization graph would be used during selection – i.e. when actually performing specialization. This is not done for two reasons:
-
It's merely an optimization: given a set of candidates that apply, we can determine the most specialized one by comparing them directly for specialization, rather than consulting the graph. Given that we also cache the results of selection, the benefit of this optimization is questionable.
-
To build the specialization graph in the first place, we need to use selection (because we need to determine whether one impl specializes another). Dealing with this reentrancy would require some additional mode switch for selection. Given that there seems to be no strong reason to use the graph anyway, we stick with a simpler approach in selection, and use the graph only for propagating default implementations.
Trait impl selection can succeed even when multiple impls can apply,
as long as they are part of the same specialization family. In that
case, it returns a single impl on success – this is the most
specialized impl known to apply. However, if there are any inference
variables in play, the returned impl may not be the actual impl we
will use at codegen time. Thus, we take special care to avoid projecting
associated types unless either (1) the associated type does not use
default and thus cannot be overridden or (2) all input types are
known concretely.
Additional Resources
This talk by @sunjay may be useful. Keep in mind that the talk only gives a broad overview of the problem and the solution (it was presented about halfway through @sunjay's work). Also, it was given in June 2018, and some things may have changed by the time you watch it.
Chalk-based trait solving
Chalk is an experimental trait solver for Rust that is
(as of May 2022) under development by the Types team.
Its goal is to enable a lot of trait system features and bug fixes
that are hard to implement (e.g. GATs or specialization). If you would like to
help in hacking on the new solver, drop by on the rust-lang Zulip in the #t-types
stream and say hello!
The new-style trait solver is based on the work done in chalk. Chalk recasts Rust's trait system explicitly in terms of logic programming. It does this by "lowering" Rust code into a kind of logic program we can then execute queries against.
The key observation here is that the Rust trait system is basically a kind of logic, and it can be mapped onto standard logical inference rules. We can then look for solutions to those inference rules in a very similar fashion to how e.g. a Prolog solver works. It turns out that we can't quite use Prolog rules (also called Horn clauses) but rather need a somewhat more expressive variant.
You can read more about chalk itself in the Chalk book section.
Ongoing work
The design of the new-style trait solving happens in two places:
chalk. The chalk repository is where we experiment with new ideas and designs for the trait system.
rustc. Once we are happy with the logical rules, we proceed to implementing them in rustc. We map our struct, trait, and impl declarations into logical inference rules in the lowering module in rustc.
Lowering to logic
- Rust traits and logic
- Type-checking normal functions
- Type-checking generic functions: beyond Horn clauses
- Source
The key observation here is that the Rust trait system is basically a kind of logic, and it can be mapped onto standard logical inference rules. We can then look for solutions to those inference rules in a very similar fashion to how e.g. a Prolog solver works. It turns out that we can't quite use Prolog rules (also called Horn clauses) but rather need a somewhat more expressive variant.
Rust traits and logic
One of the first observations is that the Rust trait system is basically a kind of logic. As such, we can map our struct, trait, and impl declarations into logical inference rules. For the most part, these are basically Horn clauses, though we'll see that to capture the full richness of Rust – and in particular to support generic programming – we have to go a bit further than standard Horn clauses.
To see how this mapping works, let's start with an example. Imagine we declare a trait and a few impls, like so:
#![allow(unused)] fn main() { trait Clone { } impl Clone for usize { } impl<T> Clone for Vec<T> where T: Clone { } }
We could map these declarations to some Horn clauses, written in a Prolog-like notation, as follows:
Clone(usize).
Clone(Vec<?T>) :- Clone(?T).
// The notation `A :- B` means "A is true if B is true".
// Or, put another way, B implies A.
In Prolog terms, we might say that Clone(Foo) – where Foo is some
Rust type – is a predicate that represents the idea that the type
Foo implements Clone. These rules are program clauses; they
state the conditions under which that predicate can be proven (i.e.,
considered true). So the first rule just says "Clone is implemented
for usize". The next rule says "for any type ?T, Clone is
implemented for Vec<?T> if clone is implemented for ?T". So
e.g. if we wanted to prove that Clone(Vec<Vec<usize>>), we would do
so by applying the rules recursively:
Clone(Vec<Vec<usize>>)is provable if:Clone(Vec<usize>)is provable if:Clone(usize)is provable. (Which it is, so we're all good.)
But now suppose we tried to prove that Clone(Vec<Bar>). This would
fail (after all, I didn't give an impl of Clone for Bar):
Clone(Vec<Bar>)is provable if:Clone(Bar)is provable. (But it is not, as there are no applicable rules.)
We can easily extend the example above to cover generic traits with
more than one input type. So imagine the Eq<T> trait, which declares
that Self is equatable with a value of type T:
trait Eq<T> { ... }
impl Eq<usize> for usize { }
impl<T: Eq<U>> Eq<Vec<U>> for Vec<T> { }
That could be mapped as follows:
Eq(usize, usize).
Eq(Vec<?T>, Vec<?U>) :- Eq(?T, ?U).
So far so good.
Type-checking normal functions
OK, now that we have defined some logical rules that are able to express when traits are implemented and to handle associated types, let's turn our focus a bit towards type-checking. Type-checking is interesting because it is what gives us the goals that we need to prove. That is, everything we've seen so far has been about how we derive the rules by which we can prove goals from the traits and impls in the program; but we are also interested in how to derive the goals that we need to prove, and those come from type-checking.
Consider type-checking the function foo() here:
fn foo() { bar::<usize>() }
fn bar<U: Eq<U>>() { }
This function is very simple, of course: all it does is to call
bar::<usize>(). Now, looking at the definition of bar(), we can see
that it has one where-clause U: Eq<U>. So, that means that foo() will
have to prove that usize: Eq<usize> in order to show that it can call bar()
with usize as the type argument.
If we wanted, we could write a Prolog predicate that defines the
conditions under which bar() can be called. We'll say that those
conditions are called being "well-formed":
barWellFormed(?U) :- Eq(?U, ?U).
Then we can say that foo() type-checks if the reference to
bar::<usize> (that is, bar() applied to the type usize) is
well-formed:
fooTypeChecks :- barWellFormed(usize).
If we try to prove the goal fooTypeChecks, it will succeed:
fooTypeChecksis provable if:barWellFormed(usize), which is provable if:Eq(usize, usize), which is provable because of an impl.
Ok, so far so good. Let's move on to type-checking a more complex function.
Type-checking generic functions: beyond Horn clauses
In the last section, we used standard Prolog horn-clauses (augmented with Rust's
notion of type equality) to type-check some simple Rust functions. But that only
works when we are type-checking non-generic functions. If we want to type-check
a generic function, it turns out we need a stronger notion of goal than what Prolog
can provide. To see what I'm talking about, let's revamp our previous
example to make foo generic:
fn foo<T: Eq<T>>() { bar::<T>() }
fn bar<U: Eq<U>>() { }
To type-check the body of foo, we need to be able to hold the type
T "abstract". That is, we need to check that the body of foo is
type-safe for all types T, not just for some specific type. We might express
this like so:
fooTypeChecks :-
// for all types T...
forall<T> {
// ...if we assume that Eq(T, T) is provable...
if (Eq(T, T)) {
// ...then we can prove that `barWellFormed(T)` holds.
barWellFormed(T)
}
}.
This notation I'm using here is the notation I've been using in my
prototype implementation; it's similar to standard mathematical
notation but a bit Rustified. Anyway, the problem is that standard
Horn clauses don't allow universal quantification (forall) or
implication (if) in goals (though many Prolog engines do support
them, as an extension). For this reason, we need to accept something
called "first-order hereditary harrop" (FOHH) clauses – this long
name basically means "standard Horn clauses with forall and if in
the body". But it's nice to know the proper name, because there is a
lot of work describing how to efficiently handle FOHH clauses; see for
example Gopalan Nadathur's excellent
"A Proof Procedure for the Logic of Hereditary Harrop Formulas"
in the bibliography of Chalk Book.
It turns out that supporting FOHH is not really all that hard. And
once we are able to do that, we can easily describe the type-checking
rule for generic functions like foo in our logic.
Source
This page is a lightly adapted version of a blog post by Nicholas Matsakis.
Goals and clauses
In logic programming terms, a goal is something that you must prove and a clause is something that you know is true. As described in the lowering to logic chapter, Rust's trait solver is based on an extension of hereditary harrop (HH) clauses, which extend traditional Prolog Horn clauses with a few new superpowers.
Goals and clauses meta structure
In Rust's solver, goals and clauses have the following forms (note that the two definitions reference one another):
Goal = DomainGoal // defined in the section below
| Goal && Goal
| Goal || Goal
| exists<K> { Goal } // existential quantification
| forall<K> { Goal } // universal quantification
| if (Clause) { Goal } // implication
| true // something that's trivially true
| ambiguous // something that's never provable
Clause = DomainGoal
| Clause :- Goal // if can prove Goal, then Clause is true
| Clause && Clause
| forall<K> { Clause }
K = <type> // a "kind"
| <lifetime>
The proof procedure for these sorts of goals is actually quite straightforward. Essentially, it's a form of depth-first search. The paper "A Proof Procedure for the Logic of Hereditary Harrop Formulas" gives the details.
In terms of code, these types are defined in
rustc_middle/src/traits/mod.rs in rustc, and in
chalk-ir/src/lib.rs in chalk.
Domain goals
Domain goals are the atoms of the trait logic. As can be seen in the definitions given above, general goals basically consist in a combination of domain goals.
Moreover, flattening a bit the definition of clauses given previously, one can see that clauses are always of the form:
forall<K1, ..., Kn> { DomainGoal :- Goal }
hence domain goals are in fact clauses' LHS. That is, at the most granular level, domain goals are what the trait solver will end up trying to prove.
To define the set of domain goals in our system, we need to first introduce a few simple formulations. A trait reference consists of the name of a trait along with a suitable set of inputs P0..Pn:
TraitRef = P0: TraitName<P1..Pn>
So, for example, u32: Display is a trait reference, as is Vec<T>: IntoIterator. Note that Rust surface syntax also permits some extra
things, like associated type bindings (Vec<T>: IntoIterator<Item = T>), that are not part of a trait reference.
A projection consists of an associated item reference along with its inputs P0..Pm:
Projection = <P0 as TraitName<P1..Pn>>::AssocItem<Pn+1..Pm>
Given these, we can define a DomainGoal as follows:
DomainGoal = Holds(WhereClause)
| FromEnv(TraitRef)
| FromEnv(Type)
| WellFormed(TraitRef)
| WellFormed(Type)
| Normalize(Projection -> Type)
WhereClause = Implemented(TraitRef)
| ProjectionEq(Projection = Type)
| Outlives(Type: Region)
| Outlives(Region: Region)
WhereClause refers to a where clause that a Rust user would actually be able
to write in a Rust program. This abstraction exists only as a convenience as we
sometimes want to only deal with domain goals that are effectively writable in
Rust.
Let's break down each one of these, one-by-one.
Implemented(TraitRef)
e.g. Implemented(i32: Copy)
True if the given trait is implemented for the given input types and lifetimes.
ProjectionEq(Projection = Type)
e.g. ProjectionEq<T as Iterator>::Item = u8
The given associated type Projection is equal to Type; this can be proved
with either normalization or using placeholder associated types. See
the section on associated types in Chalk Book.
Normalize(Projection -> Type)
e.g. ProjectionEq<T as Iterator>::Item -> u8
The given associated type Projection can be normalized to Type.
As discussed in the section on associated
types in Chalk Book, Normalize implies ProjectionEq,
but not vice versa. In general, proving Normalize(<T as Trait>::Item -> U)
also requires proving Implemented(T: Trait).
FromEnv(TraitRef)
e.g. FromEnv(Self: Add<i32>)
True if the inner TraitRef is assumed to be true,
that is, if it can be derived from the in-scope where clauses.
For example, given the following function:
#![allow(unused)] fn main() { fn loud_clone<T: Clone>(stuff: &T) -> T { println!("cloning!"); stuff.clone() } }
Inside the body of our function, we would have FromEnv(T: Clone). In-scope
where clauses nest, so a function body inside an impl body inherits the
impl body's where clauses, too.
This and the next rule are used to implement implied bounds. As we'll see
in the section on lowering, FromEnv(TraitRef) implies Implemented(TraitRef),
but not vice versa. This distinction is crucial to implied bounds.
FromEnv(Type)
e.g. FromEnv(HashSet<K>)
True if the inner Type is assumed to be well-formed, that is, if it is an
input type of a function or an impl.
For example, given the following code:
struct HashSet<K> where K: Hash { ... }
fn loud_insert<K>(set: &mut HashSet<K>, item: K) {
println!("inserting!");
set.insert(item);
}
HashSet<K> is an input type of the loud_insert function. Hence, we assume it
to be well-formed, so we would have FromEnv(HashSet<K>) inside the body of our
function. As we'll see in the section on lowering, FromEnv(HashSet<K>) implies
Implemented(K: Hash) because the
HashSet declaration was written with a K: Hash where clause. Hence, we don't
need to repeat that bound on the loud_insert function: we rather automatically
assume that it is true.
WellFormed(Item)
These goals imply that the given item is well-formed.
We can talk about different types of items being well-formed:
-
Types, like
WellFormed(Vec<i32>), which is true in Rust, orWellFormed(Vec<str>), which is not (becausestris notSized.) -
TraitRefs, like
WellFormed(Vec<i32>: Clone).
Well-formedness is important to implied bounds. In particular, the reason
it is okay to assume FromEnv(T: Clone) in the loud_clone example is that we
also verify WellFormed(T: Clone) for each call site of loud_clone.
Similarly, it is okay to assume FromEnv(HashSet<K>) in the loud_insert
example because we will verify WellFormed(HashSet<K>) for each call site of
loud_insert.
Outlives(Type: Region), Outlives(Region: Region)
e.g. Outlives(&'a str: 'b), Outlives('a: 'static)
True if the given type or region on the left outlives the right-hand region.
Coinductive goals
Most goals in our system are "inductive". In an inductive goal, circular reasoning is disallowed. Consider this example clause:
Implemented(Foo: Bar) :-
Implemented(Foo: Bar).
Considered inductively, this clause is useless: if we are trying to
prove Implemented(Foo: Bar), we would then recursively have to prove
Implemented(Foo: Bar), and that cycle would continue ad infinitum
(the trait solver will terminate here, it would just consider that
Implemented(Foo: Bar) is not known to be true).
However, some goals are co-inductive. Simply put, this means that
cycles are OK. So, if Bar were a co-inductive trait, then the rule
above would be perfectly valid, and it would indicate that
Implemented(Foo: Bar) is true.
Auto traits are one example in Rust where co-inductive goals are used.
Consider the Send trait, and imagine that we have this struct:
#![allow(unused)] fn main() { struct Foo { next: Option<Box<Foo>> } }
The default rules for auto traits say that Foo is Send if the
types of its fields are Send. Therefore, we would have a rule like
Implemented(Foo: Send) :-
Implemented(Option<Box<Foo>>: Send).
As you can probably imagine, proving that Option<Box<Foo>>: Send is
going to wind up circularly requiring us to prove that Foo: Send
again. So this would be an example where we wind up in a cycle – but
that's ok, we do consider Foo: Send to hold, even though it
references itself.
In general, co-inductive traits are used in Rust trait solving when we
want to enumerate a fixed set of possibilities. In the case of auto
traits, we are enumerating the set of reachable types from a given
starting point (i.e., Foo can reach values of type
Option<Box<Foo>>, which implies it can reach values of type
Box<Foo>, and then of type Foo, and then the cycle is complete).
In addition to auto traits, WellFormed predicates are co-inductive.
These are used to achieve a similar "enumerate all the cases" pattern,
as described in the section on implied bounds.
Incomplete chapter
Some topics yet to be written:
- Elaborate on the proof procedure
- SLG solving – introduce negative reasoning
Canonical queries
The "start" of the trait system is the canonical query (these are
both queries in the more general sense of the word – something you
would like to know the answer to – and in the
rustc-specific sense). The idea is that the type
checker or other parts of the system, may in the course of doing their
thing want to know whether some trait is implemented for some type
(e.g., is u32: Debug true?). Or they may want to
normalize some associated type.
This section covers queries at a fairly high level of abstraction. The subsections look a bit more closely at how these ideas are implemented in rustc.
The traditional, interactive Prolog query
In a traditional Prolog system, when you start a query, the solver will run off and start supplying you with every possible answer it can find. So given something like this:
?- Vec<i32>: AsRef<?U>
The solver might answer:
Vec<i32>: AsRef<[i32]>
continue? (y/n)
This continue bit is interesting. The idea in Prolog is that the
solver is finding all possible instantiations of your query that
are true. In this case, if we instantiate ?U = [i32], then the query
is true (note that a traditional Prolog interface does not, directly,
tell us a value for ?U, but we can infer one by unifying the
response with our original query – Rust's solver gives back a
substitution instead). If we were to hit y, the solver might then
give us another possible answer:
Vec<i32>: AsRef<Vec<i32>>
continue? (y/n)
This answer derives from the fact that there is a reflexive impl
(impl<T> AsRef<T> for T) for AsRef. If were to hit y again,
then we might get back a negative response:
no
Naturally, in some cases, there may be no possible answers, and hence
the solver will just give me back no right away:
?- Box<i32>: Copy
no
In some cases, there might be an infinite number of responses. So for
example if I gave this query, and I kept hitting y, then the solver
would never stop giving me back answers:
?- Vec<?U>: Clone
Vec<i32>: Clone
continue? (y/n)
Vec<Box<i32>>: Clone
continue? (y/n)
Vec<Box<Box<i32>>>: Clone
continue? (y/n)
Vec<Box<Box<Box<i32>>>>: Clone
continue? (y/n)
As you can imagine, the solver will gleefully keep adding another
layer of Box until we ask it to stop, or it runs out of memory.
Another interesting thing is that queries might still have variables in them. For example:
?- Rc<?T>: Clone
might produce the answer:
Rc<?T>: Clone
continue? (y/n)
After all, Rc<?T> is true no matter what type ?T is.
A trait query in rustc
The trait queries in rustc work somewhat differently. Instead of trying to enumerate all possible answers for you, they are looking for an unambiguous answer. In particular, when they tell you the value for a type variable, that means that this is the only possible instantiation that you could use, given the current set of impls and where-clauses, that would be provable.
The response to a trait query in rustc is typically a
Result<QueryResult<T>, NoSolution> (where the T will vary a bit
depending on the query itself). The Err(NoSolution) case indicates
that the query was false and had no answers (e.g., Box<i32>: Copy).
Otherwise, the QueryResult gives back information about the possible answer(s)
we did find. It consists of four parts:
- Certainty: tells you how sure we are of this answer. It can have two
values:
Provenmeans that the result is known to be true.- This might be the result for trying to prove
Vec<i32>: Clone, say, orRc<?T>: Clone.
- This might be the result for trying to prove
Ambiguousmeans that there were things we could not yet prove to be either true or false, typically because more type information was needed. (We'll see an example shortly.)- This might be the result for trying to prove
Vec<?T>: Clone.
- This might be the result for trying to prove
- Var values: Values for each of the unbound inference variables
(like
?T) that appeared in your original query. (Remember that in Prolog, we had to infer these.)- As we'll see in the example below, we can get back var values even
for
Ambiguouscases.
- As we'll see in the example below, we can get back var values even
for
- Region constraints: these are relations that must hold between the lifetimes that you supplied as inputs. We'll ignore these here.
- Value: The query result also comes with a value of type
T. For some specialized queries – like normalizing associated types – this is used to carry back an extra result, but it's often just().
Examples
Let's work through an example query to see what all the parts mean.
Consider the Borrow trait. This trait has a number of
impls; among them, there are these two (for clarity, I've written the
Sized bounds explicitly):
impl<T> Borrow<T> for T where T: ?Sized
impl<T> Borrow<[T]> for Vec<T> where T: Sized
Example 1. Imagine we are type-checking this (rather artificial) bit of code:
fn foo<A, B>(a: A, vec_b: Option<B>) where A: Borrow<B> { }
fn main() {
let mut t: Vec<_> = vec![]; // Type: Vec<?T>
let mut u: Option<_> = None; // Type: Option<?U>
foo(t, u); // Example 1: requires `Vec<?T>: Borrow<?U>`
...
}
As the comments indicate, we first create two variables t and u;
t is an empty vector and u is a None option. Both of these
variables have unbound inference variables in their type: ?T
represents the elements in the vector t and ?U represents the
value stored in the option u. Next, we invoke foo; comparing the
signature of foo to its arguments, we wind up with A = Vec<?T> and
B = ?U. Therefore, the where clause on foo requires that Vec<?T>: Borrow<?U>. This is thus our first example trait query.
There are many possible solutions to the query Vec<?T>: Borrow<?U>;
for example:
?U = Vec<?T>,?U = [?T],?T = u32, ?U = [u32]- and so forth.
Therefore, the result we get back would be as follows (I'm going to ignore region constraints and the "value"):
- Certainty:
Ambiguous– we're not sure yet if this holds - Var values:
[?T = ?T, ?U = ?U]– we learned nothing about the values of the variables
In short, the query result says that it is too soon to say much about
whether this trait is proven. During type-checking, this is not an
immediate error: instead, the type checker would hold on to this
requirement (Vec<?T>: Borrow<?U>) and wait. As we'll see in the next
example, it may happen that ?T and ?U wind up constrained from
other sources, in which case we can try the trait query again.
Example 2. We can now extend our previous example a bit,
and assign a value to u:
fn foo<A, B>(a: A, vec_b: Option<B>) where A: Borrow<B> { }
fn main() {
// What we saw before:
let mut t: Vec<_> = vec![]; // Type: Vec<?T>
let mut u: Option<_> = None; // Type: Option<?U>
foo(t, u); // `Vec<?T>: Borrow<?U>` => ambiguous
// New stuff:
u = Some(vec![]); // ?U = Vec<?V>
}
As a result of this assignment, the type of u is forced to be
Option<Vec<?V>>, where ?V represents the element type of the
vector. This in turn implies that ?U is unified to Vec<?V>.
Let's suppose that the type checker decides to revisit the
"as-yet-unproven" trait obligation we saw before, Vec<?T>: Borrow<?U>. ?U is no longer an unbound inference variable; it now
has a value, Vec<?V>. So, if we "refresh" the query with that value, we get:
Vec<?T>: Borrow<Vec<?V>>
This time, there is only one impl that applies, the reflexive impl:
impl<T> Borrow<T> for T where T: ?Sized
Therefore, the trait checker will answer:
- Certainty:
Proven - Var values:
[?T = ?T, ?V = ?T]
Here, it is saying that we have indeed proven that the obligation
holds, and we also know that ?T and ?V are the same type (but we
don't know what that type is yet!).
(In fact, as the function ends here, the type checker would give an
error at this point, since the element types of t and u are still
not yet known, even though they are known to be the same.)
Canonicalization
NOTE: FIXME: The content of this chapter has some overlap with Next-gen trait solving Canonicalization chapter. It is suggested to reorganize these contents in the future.
Canonicalization is the process of isolating an inference value from its context. It is a key part of implementing canonical queries, and you may wish to read the parent chapter to get more context.
Canonicalization is really based on a very simple concept: every inference variable is always in one of two states: either it is unbound, in which case we don't know yet what type it is, or it is bound, in which case we do. So to isolate some data-structure T that contains types/regions from its environment, we just walk down and find the unbound variables that appear in T; those variables get replaced with "canonical variables", starting from zero and numbered in a fixed order (left to right, for the most part, but really it doesn't matter as long as it is consistent).
So, for example, if we have the type X = (?T, ?U), where ?T and
?U are distinct, unbound inference variables, then the canonical
form of X would be (?0, ?1), where ?0 and ?1 represent these
canonical placeholders. Note that the type Y = (?U, ?T) also
canonicalizes to (?0, ?1). But the type Z = (?T, ?T) would
canonicalize to (?0, ?0) (as would (?U, ?U)). In other words, the
exact identity of the inference variables is not important – unless
they are repeated.
We use this to improve caching as well as to detect cycles and other
things during trait resolution. Roughly speaking, the idea is that if
two trait queries have the same canonical form, then they will get
the same answer. That answer will be expressed in terms of the
canonical variables (?0, ?1), which we can then map back to the
original variables (?T, ?U).
Canonicalizing the query
To see how it works, imagine that we are asking to solve the following
trait query: ?A: Foo<'static, ?B>, where ?A and ?B are unbound.
This query contains two unbound variables, but it also contains the
lifetime 'static. The trait system generally ignores all lifetimes
and treats them equally, so when canonicalizing, we will also
replace any free lifetime with a
canonical variable (Note that 'static is actually a free lifetime
variable here. We are not considering it in the typing context of the whole
program but only in the context of this trait reference. Mathematically, we
are not quantifying over the whole program, but only this obligation).
Therefore, we get the following result:
?0: Foo<'?1, ?2>
Sometimes we write this differently, like so:
for<T,L,T> { ?0: Foo<'?1, ?2> }
This for<> gives some information about each of the canonical
variables within. In this case, each T indicates a type variable,
so ?0 and ?2 are types; the L indicates a lifetime variable, so
?1 is a lifetime. The canonicalize method also gives back a
CanonicalVarValues array OV with the "original values" for each
canonicalized variable:
[?A, 'static, ?B]
We'll need this vector OV later, when we process the query response.
Executing the query
Once we've constructed the canonical query, we can try to solve it. To do so, we will wind up creating a fresh inference context and instantiating the canonical query in that context. The idea is that we create a substitution S from the canonical form containing a fresh inference variable (of suitable kind) for each canonical variable. So, for our example query:
for<T,L,T> { ?0: Foo<'?1, ?2> }
the substitution S might be:
S = [?A, '?B, ?C]
We can then replace the bound canonical variables (?0, etc) with
these inference variables, yielding the following fully instantiated
query:
?A: Foo<'?B, ?C>
Remember that substitution S though! We're going to need it later.
OK, now that we have a fresh inference context and an instantiated
query, we can go ahead and try to solve it. The trait solver itself is
explained in more detail in another section, but
suffice to say that it will compute a certainty value (Proven or
Ambiguous) and have side-effects on the inference variables we've
created. For example, if there were only one impl of Foo, like so:
impl<'a, X> Foo<'a, X> for Vec<X>
where X: 'a
{ ... }
then we might wind up with a certainty value of Proven, as well as
creating fresh inference variables '?D and ?E (to represent the
parameters on the impl) and unifying as follows:
'?B = '?D?A = Vec<?E>?C = ?E
We would also accumulate the region constraint ?E: '?D, due to the
where clause.
In order to create our final query result, we have to "lift" these values out of the query's inference context and into something that can be reapplied in our original inference context. We do that by re-applying canonicalization, but to the query result.
Canonicalizing the query result
As discussed in the parent section, most trait queries wind up
with a result that brings together a "certainty value" certainty, a
result substitution var_values, and some region constraints. To
create this, we wind up re-using the substitution S that we created
when first instantiating our query. To refresh your memory, we had a query
for<T,L,T> { ?0: Foo<'?1, ?2> }
for which we made a substutition S:
S = [?A, '?B, ?C]
We then did some work which unified some of those variables with other things. If we "refresh" S with the latest results, we get:
S = [Vec<?E>, '?D, ?E]
These are precisely the new values for the three input variables from
our original query. Note though that they include some new variables
(like ?E). We can make those go away by canonicalizing again! We don't
just canonicalize S, though, we canonicalize the whole query response QR:
QR = {
certainty: Proven, // or whatever
var_values: [Vec<?E>, '?D, ?E] // this is S
region_constraints: [?E: '?D], // from the impl
value: (), // for our purposes, just (), but
// in some cases this might have
// a type or other info
}
The result would be as follows:
Canonical(QR) = for<T, L> {
certainty: Proven,
var_values: [Vec<?0>, '?1, ?0]
region_constraints: [?0: '?1],
value: (),
}
(One subtle point: when we canonicalize the query result, we do not
use any special treatment for free lifetimes. Note that both
references to '?D, for example, were converted into the same
canonical variable (?1). This is in contrast to the original query,
where we canonicalized every free lifetime into a fresh canonical
variable.)
Now, this result must be reapplied in each context where needed.
Processing the canonicalized query result
In the previous section we produced a canonical query result. We now have to apply that result in our original context. If you recall, way back in the beginning, we were trying to prove this query:
?A: Foo<'static, ?B>
We canonicalized that into this:
for<T,L,T> { ?0: Foo<'?1, ?2> }
and now we got back a canonical response:
for<T, L> {
certainty: Proven,
var_values: [Vec<?0>, '?1, ?0]
region_constraints: [?0: '?1],
value: (),
}
We now want to apply that response to our context. Conceptually, how we do that is to (a) instantiate each of the canonical variables in the result with a fresh inference variable, (b) unify the values in the result with the original values, and then (c) record the region constraints for later. Doing step (a) would yield a result of
{
certainty: Proven,
var_values: [Vec<?C>, '?D, ?C]
^^ ^^^ fresh inference variables
region_constraints: [?C: '?D],
value: (),
}
Step (b) would then unify:
?A with Vec<?C>
'static with '?D
?B with ?C
And finally the region constraint of ?C: 'static would be recorded
for later verification.
(What we actually do is a mildly optimized variant of that: Rather
than eagerly instantiating all of the canonical values in the result
with variables, we instead walk the vector of values, looking for
cases where the value is just a canonical variable. In our example,
values[2] is ?C, so that means we can deduce that ?C := ?B and
'?D := 'static. This gives us a partial set of values. Anything for
which we do not find a value, we create an inference variable.)
Trait solving (new)
This chapter describes how trait solving works with the new WIP solver located in
rustc_trait_selection/solve. Feel free to also look at the docs for
the current solver and the chalk solver
can be found separately.
Core concepts
The goal of the trait system is to check whether a given trait bound is satisfied. Most notably when typechecking the body of - potentially generic - functions. For example:
#![allow(unused)] fn main() { fn uses_vec_clone<T: Clone>(x: Vec<T>) -> (Vec<T>, Vec<T>) { (x.clone(), x) } }
Here the call to x.clone() requires us to prove that Vec<T> implements Clone given
the assumption that T: Clone is true. We can assume T: Clone as that will be proven by
callers of this function.
The concept of "prove the Vec<T>: Clone with the assumption T: Clone" is called a Goal.
Both Vec<T>: Clone and T: Clone are represented using Predicate. There are other
predicates, most notably equality bounds on associated items: <Vec<T> as IntoIterator>::Item == T.
See the PredicateKind enum for an exhaustive list. A Goal is represented as the predicate we
have to prove and the param_env in which this predicate has to hold.
We prove goals by checking whether each possible Candidate applies for the given goal by
recursively proving its nested goals. For a list of possible candidates with examples, look at
CandidateSource. The most important candidates are Impl candidates, i.e. trait implementations
written by the user, and ParamEnv candidates, i.e. assumptions in our current environment.
Looking at the above example, to prove Vec<T>: Clone we first use
impl<T: Clone> Clone for Vec<T>. To use this impl we have to prove the nested
goal that T: Clone holds. This can use the assumption T: Clone from the ParamEnv
which does not have any nested goals. Therefore Vec<T>: Clone holds.
The trait solver can either return success, ambiguity or an error as a CanonicalResponse.
For success and ambiguity it also returns constraints inference and region constraints.
Invariants of the type system
FIXME: This file talks about invariants of the type system as a whole, not only the solver
There are a lot of invariants - things the type system guarantees to be true at all times - which are desirable or expected from other languages and type systems. Unfortunately, quite a few of them do not hold in Rust right now. This is either a fundamental to its design or caused by bugs and something that may change in the future.
It is important to know about the things you can assume while working on - and with - the type system, so here's an incomplete and unofficial list of invariants of the core type system:
- ✅: this invariant mostly holds, with some weird exceptions, you can rely on it outside of these cases
- ❌: this invariant does not hold, either due to bugs or by design, you must not rely on it for soundness or have to be incredibly careful when doing so
wf(X) implies wf(normalize(X)) ✅
If a type containing aliases is well-formed, it should also be well-formed after normalizing said aliases. We rely on this as otherwise we would have to re-check for well-formedness for these types.
This is unfortunately broken for <fndef as FnOnce<..>>::Output due to implied bounds,
resulting in #114936.
Structural equality modulo regions implies semantic equality ✅
If you have a some type and equate it to itself after replacing any regions with unique inference variables in both the lhs and rhs, the now potentially structurally different types should still be equal to each other.
Needed to prevent goals from succeeding in HIR typeck and then failing in MIR borrowck. If this does invariant is broken MIR typeck ends up failing with an ICE.
Applying inference results from a goal does not change its result ❌
TODO: this invariant is formulated in a weird way and needs to be elaborated. Pretty much: I would like this check to only fail if there's a solver bug: https://github.com/rust-lang/rust/blob/2ffeb4636b4ae376f716dc4378a7efb37632dc2d/compiler/rustc_trait_selection/src/solve/eval_ctxt.rs#L391-L407
If we prove some goal/equate types/whatever, apply the resulting inference constraints, and then redo the original action, the result should be the same.
This unfortunately does not hold - at least in the new solver - due to a few annoying reasons.
The trait solver has to be locally sound ✅
This means that we must never return success for goals for which no impl exists. That would
mean we assume a trait is implemented even though it is not, which is very likely to result in
actual unsoundness. When using where-bounds to prove a goal, the impl will be provided by the
user of the item.
This invariant only holds if we check region constraints. As we do not check region constraints
during implicit negative overlap check in coherence, this invariant is broken there. As this check
relies on completeness of the trait solver, it is not able to use the current region constraints
check - InferCtxt::resolve_regions - as its handling of type outlives goals is incomplete.
Normalization of semantically equal aliases in empty environments results in a unique type ✅
Normalization for alias types/consts has to have a unique result. Otherwise we can easily implement transmute in safe code. Given the following function, we have to make sure that the input and output types always get normalized to the same concrete type.
#![allow(unused)] fn main() { fn foo<T: Trait>( x: <T as Trait>::Assoc ) -> <T as Trait>::Assoc { x } }
Many of the currently known unsound issues end up relying on this invariant being broken. It is however very difficult to imagine a sound type system without this invariant, so the issue is that the invariant is broken, not that we incorrectly rely on it.
Generic goals and their instantiations have the same result ✅
Pretty much: If we successfully typecheck a generic function concrete instantiations of that function should also typeck. We should not get errors post-monomorphization. We can however get overflow errors at that point.
TODO: example for overflow error post-monomorphization
This invariant is relied on to allow the normalization of generic aliases. Breaking it can easily result in unsoundness, e.g. #57893
Trait goals in empty environments are proven by a unique impl ✅
If a trait goal holds with an empty environment, there should be a unique impl,
either user-defined or builtin, which is used to prove that goal. This is
necessary to select a unique method. It
We do however break this invariant in few cases, some of which are due to bugs, some by design:
- marker traits are allowed to overlap as they do not have associated items
- specialization allows specializing impls to overlap with their parent
- the builtin trait object trait implementation can overlap with a user-defined impl: #57893
The type system is complete ❌
The type system is not complete, it often adds unnecessary inference constraints, and errors even though the goal could hold.
- method selection
- opaque type inference
- handling type outlives constraints
- preferring
ParamEnvcandidates overImplcandidates during candidate selection in the trait solver
The type system is complete during the implicit negative overlap check in coherence ✅
For more on overlap checking: coherence
During the implicit negative overlap check in coherence we must never return error for goals which can be proven. This would allow for overlapping impls with potentially different associated items, breaking a bunch of other invariants.
This invariant is currently broken in many different ways while actually something we rely on. We have to be careful as it is quite easy to break:
- generalization of aliases
- generalization during subtyping binders (luckily not exploitable in coherence)
Trait solving must be (free) lifetime agnostic ✅
Trait solving during codegen should have the same result as during typeck. As we erase
all free regions during codegen we must not rely on them during typeck. A noteworthy example
is special behavior for 'static.
We also have to be careful with relying on equality of regions in the trait solver. This is fine for codegen, as we treat all erased regions as equal. We can however lose equality information from HIR to MIR typeck.
The new solver "uniquifies regions" during canonicalization, canonicalizing u32: Trait<'x, 'x>
as exists<'0, '1> u32: Trait<'0, '1>, to make it harder to rely on this property.
Removing ambiguity makes strictly more things compile ❌
Ideally we should not rely on ambiguity for things to compile. Not doing that will cause future improvements to be breaking changes.
Due to incompleteness this is not the case and improving inference can result in inference changes, breaking existing projects.
Semantic equality implies structural equality ✅
Two types being equal in the type system must mean that they have the
same TypeId after instantiating their generic parameters with concrete
arguments. This currently does not hold: #97156.
The solver
Also consider reading the documentation for the recursive solver in chalk as it is very similar to this implementation and also talks about limitations of this approach.
A rough walkthrough
The entry-point of the solver is InferCtxtEvalExt::evaluate_root_goal. This
function sets up the root EvalCtxt and then calls EvalCtxt::evaluate_goal,
to actually enter the trait solver.
EvalCtxt::evaluate_goal handles canonicalization, caching,
overflow, and solver cycles. Once that is done, it creates a nested EvalCtxt with a
separate local InferCtxt and calls EvalCtxt::compute_goal, which is responsible for the
'actual solver behavior'. We match on the PredicateKind, delegating to a separate function
for each one.
For trait goals, such a Vec<T>: Clone, EvalCtxt::compute_trait_goal has
to collect all the possible ways this goal can be proven via
EvalCtxt::assemble_and_evaluate_candidates. Each candidate is handled in
a separate "probe", to not leak inference constraints to the other candidates.
We then try to merge the assembled candidates via EvalCtxt::merge_candidates.
Important concepts and design pattern
EvalCtxt::add_goal
To prove nested goals, we don't directly call EvalCtxt::compute_goal, but instead
add the goal to the EvalCtxt with EvalCtxt::all_goal. We then prove all nested
goals together in either EvalCtxt::try_evaluate_added_goals or
EvalCtxt::evaluate_added_goals_and_make_canonical_response. This allows us to handle
inference constraints from later goals.
E.g. if we have both ?x: Debug and (): ConstrainToU8<?x> as nested goals,
then proving ?x: Debug is initially ambiguous, but after proving (): ConstrainToU8<?x>
we constrain ?x to u8 and proving u8: Debug succeeds.
Matching on TyKind
We lazily normalize types in the solver, so we always have to assume that any types
and constants are potentially unnormalized. This means that matching on TyKind can easily
be incorrect.
We handle normalization in two different ways. When proving Trait goals when normalizing
associated types, we separately assemble candidates depending on whether they structurally
match the self type. Candidates which match on the self type are handled in
EvalCtxt::assemble_candidates_via_self_ty which recurses via
EvalCtxt::assemble_candidates_after_normalizing_self_ty, which normalizes the self type
by one level. In all other cases we have to match on a TyKind we first use
EvalCtxt::try_normalize_ty to normalize the type as much as possible.
Higher ranked goals
In case the goal is higher-ranked, e.g. for<'a> F: FnOnce(&'a ()), EvalCtxt::compute_goal
eagerly instantiates 'a with a placeholder and then recursively proves
F: FnOnce(&'!a ()) as a nested goal.
Dealing with choice
Some goals can be proven in multiple ways. In these cases we try each option in
a separate "probe" and then attempt to merge the resulting responses by using
EvalCtxt::try_merge_responses. If merging the responses fails, we use
EvalCtxt::flounder instead, returning ambiguity. For some goals, we try
incompletely prefer some choices over others in case EvalCtxt::try_merge_responses
fails.
Learning more
The solver should be fairly self-contained. I hope that the above information provides a good foundation when looking at the code itself. Please reach out on zulip if you get stuck while doing so or there are some quirks and design decisions which were unclear and deserve better comments or should be mentioned here.
Canonicalization
Canonicalization is the process of isolating a value from its context and is necessary for global caching of goals which include inference variables.
The idea is that given the goals u32: Trait<?x> and u32: Trait<?y>, where ?x and ?y
are two different currently unconstrained inference variables, we should get the same result
for both goals. We can therefore prove the canonical query exists<T> u32: Trait<T> once
and reuse the result.
Let's first go over the way canonical queries work and then dive into the specifics of how canonicalization works.
A walkthrough of canonical queries
To make this a bit easier, let's use the trait goal u32: Trait<?x> as an example with the
assumption that the only relevant impl is impl<T> Trait<Vec<T>> for u32.
Canonicalizing the input
We start by canonicalizing the goal, replacing inference variables with existential and
placeholders with universal bound variables. This would result in the canonical goal
exists<T> u32: Trait<T>.
We remember the original values of all bound variables in the original context. Here this would
map T back to ?x. These original values are used later on when dealing with the query
response.
We now call the canonical query with the canonical goal.
Instantiating the canonical goal inside of the query
To actually try to prove the canonical goal we start by instantiating the bound variables with inference variables and placeholders again.
This happens inside of the query in a completely separate InferCtxt. Inside of the query we
now have a goal u32: Trait<?0>. We also remember which value we've used to instantiate the bound
variables in the canonical goal, which maps T to ?0.
We now compute the goal u32: Trait<?0> and figure out that this holds, but we've constrained
?0 to Vec<?1>. We finally convert this result to something useful to the caller.
Canonicalizing the query response
We have to return to the caller both whether the goal holds, and the inference constraints from inside of the query.
To return the inference results to the caller we canonicalize the mapping from bound variables
to the instantiated values in the query. This means that the query response is Certainty::Yes
and a mapping from T to exists<U> Vec<U>.
Instantiating the query response
The caller now has to apply the constraints returned by the query. For this they first
instantiate the bound variables of the canonical response with inference variables and
placeholders again, so the mapping in the response is now from T to Vec<?z>.
It now equates the original value of T (?x) with the value for T in the
response (Vec<?z>), which correctly constrains ?x to Vec<?z>.
ExternalConstraints
Computing a trait goal may not only constrain inference variables, it can also add region
obligations, e.g. given a goal (): AOutlivesB<'a, 'b> we would like to return the fact that
'a: 'b has to hold.
This is done by not only returning the mapping from bound variables to the instantiated values
from the query but also extracting additional ExternalConstraints from the InferCtxt context
while building the response.
How exactly does canonicalization work
TODO: link to code once the PR lands and elaborate
- types and consts: infer to existentially bound var, placeholder to universally bound var, considering universes
- generic parameters in the input get treated as placeholders in the root universe
- all regions in the input get all mapped to existentially bound vars and we "uniquify" them.
&'a (): Trait<'a>gets canonicalized toexists<'0, '1> &'0 (): Trait<'1>. We do not care about their universes and simply put all regions into the highest universe of the input. - in the output everything in a universe of the caller gets put into the root universe and only gets its correct universe when we unify the var values with the orig values of the caller
- we do not uniquify regions in the response and don't canonicalize
'static
Coinduction
The trait solver may use coinduction when proving goals. Coinduction is fairly subtle so we're giving it its own chapter.
Coinduction and induction
With induction, we recursively apply proofs until we end up with a finite proof tree.
Consider the example of Vec<Vec<Vec<u32>>>: Debug which results in the following tree.
Vec<Vec<Vec<u32>>>: DebugVec<Vec<u32>>: DebugVec<u32>: Debugu32: Debug
This tree is finite. But not all goals we would want to hold have finite proof trees, consider the following example:
#![allow(unused)] fn main() { struct List<T> { value: T, next: Option<Box<List<T>>>, } }
For List<T>: Send to hold all its fields have to recursively implement Send as well.
This would result in the following proof tree:
List<T>: SendT: SendOption<Box<List<T>>>: SendBox<List<T>>: SendList<T>: SendT: SendOption<Box<List<T>>>: SendBox<List<T>>: Send- ...
This tree would be infinitely large which is exactly what coinduction is about.
To inductively prove a goal you need to provide a finite proof tree for it. To coinductively prove a goal the provided proof tree may be infinite.
Why is coinduction correct
When checking whether some trait goals holds, we're asking "does there exist an impl
which satisfies this bound". Even if are infinite chains of nested goals, we still have a
unique impl which should be used.
How to implement coinduction
While our implementation can not check for coinduction by trying to construct an infinite tree as that would take infinite resources, it still makes sense to think of coinduction from this perspective.
As we cannot check for infinite trees, we instead search for patterns for which we know that
they would result in an infinite proof tree. The currently pattern we detect are (canonical)
cycles. If T: Send relies on T: Send then it's pretty clear that this will just go on forever.
With cycles we have to be careful with caching. Because of canonicalization of regions and inference variables encountering a cycle doesn't mean that we would get an infinite proof tree. Looking at the following example:
#![allow(unused)] fn main() { trait Foo {} struct Wrapper<T>(T); impl<T> Foo for Wrapper<Wrapper<T>> where Wrapper<T>: Foo {} }
Proving Wrapper<?0>: Foo uses the impl impl<T> Foo for Wrapper<Wrapper<T>> which constrains
?0 to Wrapper<?1> and then requires Wrapper<?1>: Foo. Due to canonicalization this would be
detected as a cycle.
The idea to solve is to return a provisional result whenever we detect a cycle and repeatedly
retry goals until the provisional result is equal to the final result of that goal. We
start out by using Yes with no constraints as the result and then update it to the result of
the previous iteration whenever we have to rerun.
TODO: elaborate here. We use the same approach as chalk for coinductive cycles.
Note that the treatment for inductive cycles currently differs by simply returning Overflow.
See the relevant chapters in the chalk book.
Future work
We currently only consider auto-traits, Sized, and WF-goals to be coinductive.
In the future we pretty much intend for all goals to be coinductive.
Lets first elaborate on why allowing more coinductive proofs is even desirable.
Recursive data types already rely on coinduction...
...they just tend to avoid them in the trait solver.
#![allow(unused)] fn main() { enum List<T> { Nil, Succ(T, Box<List<T>>), } impl<T: Clone> Clone for List<T> { fn clone(&self) -> Self { match self { List::Nil => List::Nil, List::Succ(head, tail) => List::Succ(head.clone(), tail.clone()), } } } }
We are using tail.clone() in this impl. For this we have to prove Box<List<T>>: Clone
which requires List<T>: Clone but that relies on the impl which we are currently checking.
By adding that requirement to the where-clauses of the impl, which is what we would
do with perfect derive, we move that cycle into the trait solver and get an error.
Recursive data types
We also need coinduction to reason about recursive types containing projections, e.g. the following currently fails to compile even though it should be valid.
#![allow(unused)] fn main() { use std::borrow::Cow; pub struct Foo<'a>(Cow<'a, [Foo<'a>]>); }
This issue has been known since at least 2015, see #23714 if you want to know more.
Explicitly checked implied bounds
When checking an impl, we assume that the types in the impl headers are well-formed.
This means that when using instantiating the impl we have to prove that's actually the case.
#100051 shows that this is not the case.
To fix this, we have to add WF predicates for the types in impl headers.
Without coinduction for all traits, this even breaks core.
#![allow(unused)] fn main() { trait FromResidual<R> {} trait Try: FromResidual<<Self as Try>::Residual> { type Residual; } struct Ready<T>(T); impl<T> Try for Ready<T> { type Residual = Ready<()>; } impl<T> FromResidual<<Ready<T> as Try>::Residual> for Ready<T> {} }
When checking that the impl of FromResidual is well formed we get the following cycle:
The impl is well formed if <Ready<T> as Try>::Residual and Ready<T> are well formed.
wf(<Ready<T> as Try>::Residual)requiresReady<T>: Try, which requires because of the super traitReady<T>: FromResidual<Ready<T> as Try>::Residual>, because of implied bounds on implwf(<Ready<T> as Try>::Residual):tada: cycle
Issues when extending coinduction to more goals
There are some additional issues to keep in mind when extending coinduction. The issues here are not relevant for the current solver.
Implied super trait bounds
Our trait system currently treats super traits, e.g. trait Trait: SuperTrait,
by 1) requiring that SuperTrait has to hold for all types which implement Trait,
and 2) assuming SuperTrait holds if Trait holds.
Relying on 2) while proving 1) is unsound. This can only be observed in case of
coinductive cycles. Without cycles, whenever we rely on 2) we must have also
proven 1) without relying on 2) for the used impl of Trait.
#![allow(unused)] fn main() { trait Trait: SuperTrait {} impl<T: Trait> Trait for T {} // Keeping the current setup for coinduction // would allow this compile. Uff :< fn sup<T: SuperTrait>() {} fn requires_trait<T: Trait>() { sup::<T>() } fn generic<T>() { requires_trait::<T>() } }
This is not really fundamental to coinduction but rather an existing property which is made unsound because of it.
Possible solutions
The easiest way to solve this would be to completely remove 2) and always elaborate
T: Trait to T: Trait and T: SuperTrait outside of the trait solver.
This would allow us to also remove 1), but as we still have to prove ordinary
where-bounds on traits, that's just additional work.
While one could imagine ways to disable cyclic uses of 2) when checking 1), at least the ideas of myself - @lcnr - are all far to complex to be reasonable.
normalizes_to goals and progress
A normalizes_to goal represents the requirement that <T as Trait>::Assoc normalizes
to some U. This is achieved by defacto first normalizing <T as Trait>::Assoc and then
equating the resulting type with U. It should be a mapping as each projection should normalize
to exactly one type. By simply allowing infinite proof trees, we would get the following behavior:
#![allow(unused)] fn main() { trait Trait { type Assoc; } impl Trait for () { type Assoc = <() as Trait>::Assoc; } }
If we now compute normalizes_to(<() as Trait>::Assoc, Vec<u32>), we would resolve the impl
and get the associated type <() as Trait>::Assoc. We then equate that with the expected type,
causing us to check normalizes_to(<() as Trait>::Assoc, Vec<u32>) again.
This just goes on forever, resulting in an infinite proof tree.
This means that <() as Trait>::Assoc would be equal to any other type which is unsound.
How to solve this
WARNING: THIS IS SUBTLE AND MIGHT BE WRONG
Unlike trait goals, normalizes_to has to be productive1. A normalizes_to goal
is productive once the projection normalizes to a rigid type constructor,
so <() as Trait>::Assoc normalizing to Vec<<() as Trait>::Assoc> would be productive.
A normalizes_to goal has two kinds of nested goals. Nested requirements needed to actually
normalize the projection, and the equality between the normalized projection and the
expected type. Only the equality has to be productive. A branch in the proof tree is productive
if it is either finite, or contains at least one normalizes_to where the alias is resolved
to a rigid type constructor.
Alternatively, we could simply always treat the equate branch of normalizes_to as inductive.
Any cycles should result in infinite types, which aren't supported anyways and would only
result in overflow when deeply normalizing for codegen.
experimentation and examples: https://hackmd.io/-8p0AHnzSq2VAE6HE_wX-w?view
Another attempt at a summary.
- in projection eq, we must make progress with constraining the rhs
- a cycle is only ok if while equating we have a rigid ty on the lhs after norm at least once
- cycles outside of the recursive
eqcall ofnormalizes_toare always fine
related: https://coq.inria.fr/refman/language/core/coinductive.html#top-level-definitions-of-corecursive-functions
Caching in the new trait solver
Caching results of the trait solver is necessary for performance.
We have to make sure that it is sound. Caching is handled by the
SearchGraph
The global cache
At its core, the cache is fairly straightforward. When evaluating a goal, we check whether it's in the global cache. If so, we reuse that entry. If not, we compute the goal and then store its result in the cache.
To handle incremental compilation the computation of a goal happens inside of
DepGraph::with_anon_task which creates a new DepNode which depends on all queries
used inside of this computation. When accessing the global cache we then read this
DepNode, manually adding a dependency edge to all the queries used: source.
Dealing with overflow
Hitting the recursion limit is not fatal in the new trait solver but instead simply causes it to return ambiguity: source. Whether we hit the recursion limit can therefore change the result without resulting in a compilation failure. This means we must consider the remaining available depth when accessing a cache result.
We do this by storing more information in the cache entry. For goals whose evaluation
did not reach the recursion limit, we simply store its reached depth: source.
These results can freely be used as long as the current available_depth is higher than
its reached_depth: source. We then update the reached depth of the
current goal to make sure that whether we've used the global cache entry is not
observable: source.
For goals which reach the recursion limit we currently only use the cached result if the available depth exactly matches the depth of the entry. The cache entry for each goal therefore contains a separate result for each remaining depth: source.1
Handling cycles
The trait solver has to support cycles. These cycles are either inductive or coinductive,
depending on the participating goals. See the chapter on coinduction for more details.
We distinguish between the cycle heads and the cycle root: a stack entry is a
cycle head if it recursively accessed. The root is the deepest goal on the stack which
is involved in any cycle. Given the following dependency tree, A and B are both cycle
heads, while only A is a root.
graph TB
A --> B
B --> C
C --> B
C --> A
The result of cycle participants depends on the result of goals still on the stack.
However, we are currently computing that result, so its result is still unknown. This is
handled by evaluating cycle heads until we reach a fixpoint. In the first iteration, we
return either success or overflow with no constraints, depending on whether the cycle is
coinductive: source. After evaluating the head of a cycle, we
check whether its provisional_result is equal to the result of this iteration. If so,
we've finished evaluating this cycle and return its result. If not, we update the provisional
result and reevaluate the goal: source. After the first iteration it does not
matter whether cycles are coinductive or inductive. We always use the provisional result.
Only caching cycle roots
We cannot move the result of any cycle participant to the global cache until we've finished evaluating the cycle root. However, even after we've completely evaluated the cycle, we are still forced to discard the result of all participants apart from the root itself.
We track the query dependencies of all global cache entries. This causes the caching of
cycle participants to be non-trivial. We cannot simply reuse the DepNode of the cycle
root.2 If we have a cycle A -> B -> A, then the DepNode for A contains a dependency
from A -> B. Reusing this entry for B may break if the source is changed. The B -> A
edge may not exist anymore and A may have been completely removed. This can easily result
in an ICE.
However, it's even worse as the result of a cycle can change depending on which goal is the root: example. This forces us to weaken caching even further. We must not use a cache entry of a cycle root, if there exists a stack entry, which was a participant of its cycle involving that root. We do this by storing all cycle participants of a given root in its global cache entry and checking that it contains no element of the stack: source.
The provisional cache
TODO: write this :3
- stack dependence of provisional results
- edge case: provisional cache impacts behavior
This is overly restrictive: if all nested goal return the overflow response with some
availabledepth n, then their result should be the same for any depths smaller than n.
We can implement this optimization in the future.
summarizing the relevant zulip thread
Proof trees
While the trait solver itself only returns whether a goal holds and the necessary
constraints, we sometimes also want to know what happened while trying to prove
it. While the trait solver should generally be treated as a black box by the rest
of the compiler, we cannot completely ignore its internals and provide "proof trees"
as an interface for this. To use them you implement the ProofTreeVisitor trait,
see its existing implementations for examples. The most notable uses are to compute
the intercrate ambiguity causes for coherence errors,
improving trait solver errors, and
eagerly inferring closure signatures.
Computing proof trees
The trait solver uses Canonicalization and uses completely separate InferCtxt for
each nested goal. Both diagnostics and auto-traits in rustdoc need to correctly
handle "looking into nested goals". Given a goal like Vec<Vec<?x>>: Debug, we
canonicalize to exists<T0> Vec<Vec<T0>>: Debug, instantiate that goal as
Vec<Vec<?0>>: Debug, get a nested goal Vec<?0>: Debug, canonicalize this to get
exists<T0> Vec<T0>: Debug, instantiate this as Vec<?0>: Debug which then results
in a nested ?0: Debug goal which is ambiguous.
We compute proof trees by passing a ProofTreeBuilder to the search graph which is
converting the evaluation steps of the trait solver into a tree. When storing any
data using inference variables or placeholders, the data is canonicalized together
with the list of all unconstrained inference variables created during this computation.
This CanonicalState is then instantiated in the parent inference context while
walking the proof tree, using the list of inference variables to connect all the
canonicalized values created during this evaluation.
Debugging the solver
We previously also tried to use proof trees to debug the solver implementation. This
has different design requirements than analyzing it programmatically. The recommended
way to debug the trait solver is by using tracing. The trait solver only uses the
debug tracing level for its general 'shape' and trace for additional detail.
RUSTC_LOG=rustc_next_trait_solver=debug therefore gives you a general outline
and RUSTC_LOG=rustc_next_trait_solver=trace can then be used if more precise
information is required.
Normalization in the new solver
With the new solver we've made some fairly significant changes to normalization when compared to the existing implementation.
We now differentiate between "one-step normalization", "structural normalization" and "deep normalization".
One-step normalization
One-step normalization is implemented via NormalizesTo goals. Unlike other goals
in the trait solver, NormalizesTo always expects the term to be an unconstrained
inference variable1. Think of it as a function, taking an alias as input
and returning its underlying value. If the alias is rigid, NormalizesTo fails and
returns NoSolution. This is the case for <T as Trait>::Assoc if there's a T: Trait
where-bound and for opaque types with Reveal::UserFacing unless they are in the
defining scope. We must not treat any aliases as rigid in coherence.
The underlying value may itself be an unnormalized alias, e.g.
NormalizesTo(<<() as Id>::This as Id>::This) only returns <() as Id>::This,
even though that alias can be further normalized to (). As the term is
always an unconstrained inference variable, the expected term cannot influence
normalization, see trait-system-refactor-initiative#22 for more.
Only ever computing NormalizesTo goals with an unconstrained inference variable
requires special solver support. It is only used by AliasRelate goals and pending
NormalizesTo goals are tracked separately from other goals: source.
As the expected term is always erased in NormalizesTo, we have to return its
ambiguous nested goals to its caller as not doing so weakens inference. See
#122687 for more details.
AliasRelate and structural normalization
We structurally normalize an alias by applying one-step normalization until
we end up with a rigid alias, ambiguity, or overflow. This is done by repeatedly
evaluating NormalizesTo goals inside of a snapshot: source.
AliasRelate(lhs, rhs) is implemented by first structurally normalizing both the
lhs and the rhs and then relating the resulting rigid types (or inference
variables). Importantly, if lhs or rhs ends up as an alias, this alias can
now be treated as rigid and gets unified without emitting a nested AliasRelate
goal: source.
This means that AliasRelate with an unconstrained rhs ends up functioning
similar to NormalizesTo, acting as a function which fully normalizes lhs
before assigning the resulting rigid type to an inference variable. This is used by
fn structurally_normalize_ty both inside and outside of the trait solver.
This has to be used whenever we match on the value of some type, both inside
and outside of the trait solver.
FIXME: structure, maybe we should have an "alias handling" chapter instead as talking about normalization without explaining that doesn't make too much sense.
FIXME: it is likely that this will subtly change again by mostly moving structural
normalization into NormalizesTo.
Deep normalization
By walking over a type, and using fn structurally_normalize_ty for each encountered
alias, it is possible to deeply normalize a type, normalizing all aliases as much as
possible. However, this only works for aliases referencing bound variables if they are
not ambiguous as we're unable to replace the alias with a corresponding inference
variable without leaking universes.
FIXME: we previously had to also be careful about instantiating the new inference
variable with another normalizeable alias. Due to our recent changes to generalization,
this should not be the case anymore. Equating an inference variable with an alias
now always uses AliasRelate to fully normalize the alias before instantiating the
inference variable: source
Outside of the trait solver
The core type system - relating types and trait solving - will not need deep
normalization with the new solver. There are still some areas which depend on it.
For these areas there is the function At::deeply_normalize. Without additional
trait solver support deep normalization does not always work in case of ambiguity.
Luckily deep normalization is currently only necessary in places where there is no ambiguity.
At::deeply_normalize immediately fails if there's ambiguity.
If we only care about the outermost layer of types, we instead use
At::structurally_normalize or FnCtxt::(try_)structurally_resolve_type.
Unlike At::deeply_normalize, structural normalization is also used in cases where we
have to handle ambiguity.
Because this may result in behavior changes depending on how the trait solver handles
ambiguity, it is safer to also require full normalization there. This happens in
FnCtxt::structurally_resolve_type which always emits a hard error if the self type ends
up as an inference variable. There are some existing places which have a fallback for
inference variables instead. These places use try_structurally_resolve_type instead.
Why deep normalization with ambiguity is hard
Fully correct deep normalization is very challenging, especially with the new solver given that we do not want to deeply normalize inside of the solver. Mostly deeply normalizing but sometimes failing to do so is bound to cause very hard to minimize and understand bugs. If possible, avoiding any reliance on deep normalization entirely therefore feels preferable.
If the solver itself does not deeply normalize, any inference constraints returned by the solver would require normalization. Handling this correctly is ugly. This also means that we change goals we provide to the trait solver by "normalizing away" some projections.
The way we (mostly) guarantee deep normalization with the old solver is by eagerly replacing
the projection with an inference variable and emitting a nested Projection goal. This works
as Projection goals in the old solver deeply normalize. Unless we add another PredicateKind
for deep normalization to the new solver we cannot emulate this behavior. This does not work
for projections with bound variables, sometimes leaving them unnormalized. An approach which
also supports projections with bound variables will be even more involved.
opaque types are currently handled a bit differently. this may change in the future
Opaque types in the new solver
The way opaque types are handled in the new solver differs from the old implementation. This should be a self-contained explanation of the behavior in the new solver.
opaques are alias types
Opaque types are treated the same as other aliases, most notabily associated types, whenever possible. There should be as few divergences in behavior as possible.
This is desirable, as they are very similar to other alias types, in that they can be normalized to their hidden type and also have the same requirements for completeness. Treating them this way also reduces the complexity of the type system by sharing code. Having to deal with opaque types separately results in more complex rules and new kinds of interactions. As we need to treat them like other aliases in the implicit-negative mode, having significant differences between modes also adds complexity.
open question: is there an alternative approach here, maybe by treating them more like rigid types with more limited places to instantiate them? they would still have to be ordinary aliases during coherence
normalizes-to for opaques
normalizes-to is used to define the one-step normalization behavior for aliases in the new
solver: <<T as IdInner>::Assoc as IdOuter>::Assoc first normalizes to <T as IdInner>::Assoc
which then normalizes to T. It takes both the AliasTy which is getting normalized and the
expected Term. To use normalizes-to for actual normalization, the expected term can simply
be an unconstrained inference variable.
For opaque types in the defining scope and in the implicit-negative coherence mode, this is
always done in two steps. Outside of the defining scope normalizes-to for opaques always
returns Err(NoSolution).
We start by trying to to assign the expected type as a hidden type.
In the implicit-negative coherence mode, this currently always results in ambiguity without interacting with the opaque types storage. We could instead add allow 'defining' all opaque types, discarding their inferred types at the end, changing the behavior of an opaque type is used multiple times during coherence: example
Inside of the defining scope we start by checking whether the type and const arguments of the
opaque are all placeholders: source. If this check is ambiguous,
return ambiguity, if it fails, return Err(NoSolution). This check ignores regions which are
only checked at the end of borrowck. If it succeeds, continue.
We then check whether we're able to semantically unify the generic arguments of the opaque
with the arguments of any opaque type already in the opaque types storage. If so, we unify the
previously stored type with the expected type of this normalizes-to call: source1.
If not, we insert the expected type in the opaque types storage: source2. Finally, we check whether the item bounds of the opaque hold for the expected type: source.
FIXME: this should ideally only result in a unique candidate given that we require the args to be placeholders and regions are always inference vars 2: FIXME: why do we check whether the expected type is rigid for this.
using alias-bounds of normalizable aliases
https://github.com/rust-lang/trait-system-refactor-initiative/issues/77
Using an AliasBound candidate for normalizable aliases is generally not possible as an
associated type can have stronger bounds then the resulting type when normalizing via a
ParamEnv candidate.
These candidates would change our exact normalization strategy to be user-facing. It is otherwise pretty much unobservable whether we eagerly normalize. Where we normalize is something we likely want to change that after removing support for the old solver, so that would be undesirable.
opaque types can be defined anywhere
Opaque types in their defining-scope can be defined anywhere, whether when simply relating types or in the trait solver. This removes order dependence and incompleteness. Without this the result of a goal can differ due to subtle reasons, e.g. whether we try to evaluate a goal using the opaque before the first defining use of the opaque.
higher ranked opaque types in their defining scope
These are not supported and trying to define them right now should always error.
FIXME: Because looking up opaque types in the opaque type storage can now unify regions, we have to eagerly check that the opaque types does not reference placeholders. We otherwise end up leaking placeholders.
member constraints
The handling of member constraints does not change in the new solver. See the relevant existing chapter for that.
calling methods on opaque types
FIXME: We need to continue to support calling methods on still unconstrained opaque types in their defining scope. It's unclear how to best do this.
#![allow(unused)] fn main() { use std::future::Future; use futures::FutureExt; fn go(i: usize) -> impl Future<Output = ()> + Send + 'static { async move { if i != 0 { // This returns `impl Future<Output = ()>` in its defining scope, // we don't know the concrete type of that opaque at this point. // Currently treats the opaque as a known type and succeeds, but // from the perspective of "easiest to soundly implement", it would // be good for this to be ambiguous. go(i - 1).boxed().await; } } } }
Significant changes and quirks
While some of the items below are already mentioned separately, this page tracks the main changes from the old trait system implementation. This also mentions some ways in which the solver significantly diverges from an idealized implementation. This document simplifies and ignores edge cases. It is recommended to add an implicit "mostly" to each statement.
Canonicalization
The new solver uses canonicalization when evaluating nested goals. In case there are possibly multiple candidates, each candidate is eagerly canonicalized. We then attempt to merge their canonical responses. This differs from the old implementation which does not use canonicalization inside of the trait system.
This has a some major impacts on the design of both solvers. Without using canonicalization to stash the constraints of candidates, candidate selection has to discard the constraints of each candidate, only applying the constraints by reevaluating the candidate after it has been selected: source. Without canonicalization it is also not possible to cache the inference constraints from evaluating a goal. This causes the old implementation to have two systems: evaluate and fulfill. Evaluation is cached, does not apply inference constraints and is used when selecting candidates. Fulfillment applies inference and region constraints is not cached and applies inference constraints.
By using canonicalization, the new implementation is able to merge evaluation and fulfillment, avoiding complexity and subtle differences in behavior. It greatly simplifies caching and prevents accidentally relying on untracked information. It allows us to avoid reevaluating candidates after selection and enables us to merge the responses of multiple candidates. However, canonicalizing goals during evaluation forces the new implementation to use a fixpoint algorithm when encountering cycles during trait solving: source.
Deferred alias equality
The new implementation emits AliasRelate goals when relating aliases while the
old implementation structurally relates the aliases instead. This enables the
new solver to stall equality until it is able to normalize the related aliases.
The behavior of the old solver is incomplete and relies on eager normalization which replaces ambiguous aliases with inference variables. As this is not not possible for aliases containing bound variables, the old implementation does not handle aliases inside of binders correctly, e.g. #102048. See the chapter on normalization for more details.
Eagerly evaluating nested goals
The new implementation eagerly handles nested goals instead of returning them to the caller. The old implementation does both. In evaluation nested goals are eagerly handled, while fulfillment simply returns them for later processing.
As the new implementation has to be able to eagerly handle nested goals for candidate selection, always doing so reduces complexity. It may also enable us to merge more candidates in the future.
Nested goals are evaluated until reaching a fixpoint
The new implementation always evaluates goals in a loop until reaching a fixpoint. The old implementation only does so in fulfillment, but not in evaluation. Always doing so strengthens inference and is reduces the order dependence of the trait solver. See trait-system-refactor-initiative#102.
Proof trees and providing diagnostics information
The new implementation does not track diagnostics information directly, instead providing proof trees which are used to lazily compute the relevant information. This is not yet fully fleshed out and somewhat hacky. The goal is to avoid tracking this information in the happy path to improve performance and to avoid accidentally relying on diagnostics data for behavior.
Major quirks of the new implementation
Hiding impls if there are any env candidates
If there is at least one ParamEnv or AliasBound candidate to prove
some Trait goal, we discard all impl candidates for both Trait and
Projection goals: source. This prevents users from
using an impl which is entirely covered by a where-bound, matching the
behavior of the old implementation and avoiding some weird errors,
e.g. trait-system-refactor-initiative#76.
NormalizesTo goals are a function
See the normalization chapter. We replace the expected term with an unconstrained
inference variable before computing NormalizesTo goals to prevent it from affecting
normalization. This means that NormalizesTo goals are handled somewhat differently
from all other goal kinds and need some additional solver support. Most notably,
their ambiguous nested goals are returned to the caller which then evaluates them.
See #122687 for more details.
CoerceUnsized
CoerceUnsized is primarily concerned with data containers. When a struct
(typically, a smart pointer) implements CoerceUnsized, that means that the
data it points to is being unsized.
Some implementors of CoerceUnsized include:
&TArc<T>Box<T>
This trait is (eventually) intended to be implemented by user-written smart
pointers, and there are rules about when a type is allowed to implement
CoerceUnsized that are explained in the trait's documentation.
Unsize
To contrast, the Unsize trait is concerned the actual types that are allowed
to be unsized.
This is not intended to be implemented by users ever, since Unsize does not
instruct the compiler (namely codegen) how to unsize a type, just whether it
is allowed to be unsized. This is paired somewhat intimately with codegen
which must understand how types are represented and unsized.
Primitive unsizing implementations
Built-in implementations are provided for:
T->dyn Trait + 'awhenT: Trait(andT: Sized + 'a, andTraitis dyn-compatible1).[T; N]->[T]
Structural implementations
There are two implementations of Unsize which can be thought of as
structural:
(A1, A2, .., An): Unsize<(A1, A2, .., U)>givenAn: Unsize<U>, which allows the tail field of a tuple to be unsized. This is gated behind theunsized_tuple_coercionfeature.Struct<.., Pi, .., Pj, ..>: Unsize<Struct<.., Ui, .., Uj, ..>>givenTailField<Pi, .., Pj>: Unsize<Ui, .. Uj>, which allows the tail field of a struct to be unsized if it is the only field that mentions generic parametersPi, ..,Pj(which don't need to be contiguous).
The rules for the latter implementation are slightly complicated, since they may allow more than one parameter to be changed (not necessarily unsized) and are best stated in terms of the tail field of the struct.
Upcasting implementations
Two things are called "upcasting" internally:
- True upcasting
dyn SubTrait->dyn SuperTrait(this also allows dropping auto traits and adjusting lifetimes, as below). - Dropping auto traits and adjusting the lifetimes of dyn trait
without changing the principal2:
dyn Trait + AutoTraits... + 'a->dyn Trait + NewAutoTraits... + 'bwhenAutoTraits⊇NewAutoTraits, and'a: 'b.
These may seem like different operations, since (1.) includes adjusting the vtable of a dyn trait, while (2.) is a no-op. However, to the type system, these are handled with much the same code.
This built-in implementation of Unsize is the most involved, particularly
after it was reworked to
support the complexities of associated types.
Specifically, the upcasting algorithm involves: For each supertrait of the source dyn trait's principal (including itself)...
- Unify the super trait ref with the principal of the target (making sure we only ever upcast to a true supertrait, and never via an impl).
- For every auto trait in the target, check that it's present in the source (allowing us to drop auto traits, but never gain new ones).
- For every projection in the target, check that it unifies with a single
projection in the source (since there may be more than one given
trait Sub: Sup<.., A = i32> + Sup<.., A = u32>).
Specifically, (3.) prevents a choice of projection bound to guide inference unnecessarily, though it may guide inference when it is unambiguous.
The principal is the one non-auto trait of a dyn Trait.
1: Formerly known as "object safe".
Type checking
The hir_analysis crate contains the source for "type collection" as well
as a bunch of related functionality.
Checking the bodies of functions is implemented in the hir_typeck crate.
These crates draw heavily on the type inference and trait solving.
Type collection
Type "collection" is the process of converting the types found in the HIR
(hir::Ty), which represent the syntactic things that the user wrote, into the
internal representation used by the compiler (Ty<'tcx>) – we also do
similar conversions for where-clauses and other bits of the function signature.
To try and get a sense for the difference, consider this function:
struct Foo { }
fn foo(x: Foo, y: self::Foo) { ... }
// ^^^ ^^^^^^^^^
Those two parameters x and y each have the same type: but they will have
distinct hir::Ty nodes. Those nodes will have different spans, and of course
they encode the path somewhat differently. But once they are "collected" into
Ty<'tcx> nodes, they will be represented by the exact same internal type.
Collection is defined as a bundle of queries for computing information about the various functions, traits, and other items in the crate being compiled. Note that each of these queries is concerned with interprocedural things – for example, for a function definition, collection will figure out the type and signature of the function, but it will not visit the body of the function in any way, nor examine type annotations on local variables (that's the job of type checking).
For more details, see the collect module.
TODO: actually talk about type checking... #1161
Method lookup
Method lookup can be rather complex due to the interaction of a number of factors, such as self types, autoderef, trait lookup, etc. This file provides an overview of the process. More detailed notes are in the code itself, naturally.
One way to think of method lookup is that we convert an expression of
the form receiver.method(...) into a more explicit fully-qualified syntax
(formerly called UFCS):
Trait::method(ADJ(receiver), ...)for a trait callReceiverType::method(ADJ(receiver), ...)for an inherent method call
Here ADJ is some kind of adjustment, which is typically a series of
autoderefs and then possibly an autoref (e.g., &**receiver). However
we sometimes do other adjustments and coercions along the way, in
particular unsizing (e.g., converting from [T; n] to [T]).
Method lookup is divided into two major phases:
- Probing (
probe.rs). The probe phase is when we decide what method to call and how to adjust the receiver. - Confirmation (
confirm.rs). The confirmation phase "applies" this selection, updating the side-tables, unifying type variables, and otherwise doing side-effectful things.
One reason for this division is to be more amenable to caching. The
probe phase produces a "pick" (probe::Pick), which is designed to be
cacheable across method-call sites. Therefore, it does not include
inference variables or other information.
The Probe phase
Steps
The first thing that the probe phase does is to create a series of
steps. This is done by progressively dereferencing the receiver type
until it cannot be deref'd anymore, as well as applying an optional
"unsize" step. So if the receiver has type Rc<Box<[T; 3]>>, this
might yield:
Rc<Box<[T; 3]>>Box<[T; 3]>[T; 3][T]
Candidate assembly
We then search along those steps to create a list of candidates. A
Candidate is a method item that might plausibly be the method being
invoked. For each candidate, we'll derive a "transformed self type"
that takes into account explicit self.
Candidates are grouped into two kinds, inherent and extension.
Inherent candidates are those that are derived from the
type of the receiver itself. So, if you have a receiver of some
nominal type Foo (e.g., a struct), any methods defined within an
impl like impl Foo are inherent methods. Nothing needs to be
imported to use an inherent method, they are associated with the type
itself (note that inherent impls can only be defined in the same
crate as the type itself).
FIXME: Inherent candidates are not always derived from impls. If you
have a trait object, such as a value of type Box<ToString>, then the
trait methods (to_string(), in this case) are inherently associated
with it. Another case is type parameters, in which case the methods of
their bounds are inherent. However, this part of the rules is subject
to change: when DST's "impl Trait for Trait" is complete, trait object
dispatch could be subsumed into trait matching, and the type parameter
behavior should be reconsidered in light of where clauses.
TODO: Is this FIXME still accurate?
Extension candidates are derived from imported traits. If I have
the trait ToString imported, and I call to_string() as a method,
then we will list the to_string() definition in each impl of
ToString as a candidate. These kinds of method calls are called
"extension methods".
So, let's continue our example. Imagine that we were calling a method
foo with the receiver Rc<Box<[T; 3]>> and there is a trait Foo
that defines it with &self for the type Rc<U> as well as a method
on the type Box that defines foo but with &mut self. Then we
might have two candidates:
&Rc<U>as an extension candidate&mut Box<U>as an inherent candidate
Candidate search
Finally, to actually pick the method, we will search down the steps, trying to match the receiver type against the candidate types. At each step, we also consider an auto-ref and auto-mut-ref to see whether that makes any of the candidates match. For each resulting receiver type, we consider inherent candidates before extension candidates. If there are multiple matching candidates in a group, we report an error, except that multiple impls of the same trait are treated as a single match. Otherwise we pick the first match we find.
In the case of our example, the first step is Rc<Box<[T; 3]>>,
which does not itself match any candidate. But when we autoref it, we
get the type &Rc<Box<[T; 3]>> which matches &Rc<U>. We would then
recursively consider all where-clauses that appear on the impl: if
those match (or we cannot rule out that they do), then this is the
method we would pick. Otherwise, we would continue down the series of
steps.
Variance of type and lifetime parameters
For a more general background on variance, see the background appendix.
During type checking we must infer the variance of type and lifetime parameters. The algorithm is taken from Section 4 of the paper "Taming the Wildcards: Combining Definition- and Use-Site Variance" published in PLDI'11 and written by Altidor et al., and hereafter referred to as The Paper.
This inference is explicitly designed not to consider the uses of
types within code. To determine the variance of type parameters
defined on type X, we only consider the definition of the type X
and the definitions of any types it references.
We only infer variance for type parameters found on data types
like structs and enums. In these cases, there is a fairly straightforward
explanation for what variance means. The variance of the type
or lifetime parameters defines whether T<A> is a subtype of T<B>
(resp. T<'a> and T<'b>) based on the relationship of A and B
(resp. 'a and 'b).
We do not infer variance for type parameters found on traits, functions, or impls. Variance on trait parameters can indeed make sense (and we used to compute it) but it is actually rather subtle in meaning and not that useful in practice, so we removed it. See the addendum for some details. Variances on function/impl parameters, on the other hand, doesn't make sense because these parameters are instantiated and then forgotten, they don't persist in types or compiled byproducts.
Notation
We use the notation of The Paper throughout this chapter:
+is covariance.-is contravariance.*is bivariance.ois invariance.
The algorithm
The basic idea is quite straightforward. We iterate over the types
defined and, for each use of a type parameter X, accumulate a
constraint indicating that the variance of X must be valid for the
variance of that use site. We then iteratively refine the variance of
X until all constraints are met. There is always a solution, because at
the limit we can declare all type parameters to be invariant and all
constraints will be satisfied.
As a simple example, consider:
enum Option<A> { Some(A), None }
enum OptionalFn<B> { Some(|B|), None }
enum OptionalMap<C> { Some(|C| -> C), None }
Here, we will generate the constraints:
1. V(A) <= +
2. V(B) <= -
3. V(C) <= +
4. V(C) <= -
These indicate that (1) the variance of A must be at most covariant; (2) the variance of B must be at most contravariant; and (3, 4) the variance of C must be at most covariant and contravariant. All of these results are based on a variance lattice defined as follows:
* Top (bivariant)
- +
o Bottom (invariant)
Based on this lattice, the solution V(A)=+, V(B)=-, V(C)=o is the
optimal solution. Note that there is always a naive solution which
just declares all variables to be invariant.
You may be wondering why fixed-point iteration is required. The reason is that the variance of a use site may itself be a function of the variance of other type parameters. In full generality, our constraints take the form:
V(X) <= Term
Term := + | - | * | o | V(X) | Term x Term
Here the notation V(X) indicates the variance of a type/region
parameter X with respect to its defining class. Term x Term
represents the "variance transform" as defined in the paper:
If the variance of a type variable
Xin type expressionEisV2and the definition-site variance of the corresponding type parameter of a classCisV1, then the variance ofXin the type expressionC<E>isV3 = V1.xform(V2).
Constraints
If I have a struct or enum with where clauses:
struct Foo<T: Bar> { ... }
you might wonder whether the variance of T with respect to Bar affects the
variance T with respect to Foo. I claim no. The reason: assume that T is
invariant with respect to Bar but covariant with respect to Foo. And then
we have a Foo<X> that is upcast to Foo<Y>, where X <: Y. However, while
X : Bar, Y : Bar does not hold. In that case, the upcast will be illegal,
but not because of a variance failure, but rather because the target type
Foo<Y> is itself just not well-formed. Basically we get to assume
well-formedness of all types involved before considering variance.
Dependency graph management
Because variance is a whole-crate inference, its dependency graph can become quite muddled if we are not careful. To resolve this, we refactor into two queries:
crate_variancescomputes the variance for all items in the current crate.variances_ofaccesses the variance for an individual reading; it works by requestingcrate_variancesand extracting the relevant data.
If you limit yourself to reading variances_of, your code will only
depend then on the inference of that particular item.
Ultimately, this setup relies on the red-green algorithm. In particular,
every variance query effectively depends on all type definitions in the entire
crate (through crate_variances), but since most changes will not result in a
change to the actual results from variance inference, the variances_of query
will wind up being considered green after it is re-evaluated.
Addendum: Variance on traits
As mentioned above, we used to permit variance on traits. This was
computed based on the appearance of trait type parameters in
method signatures and was used to represent the compatibility of
vtables in trait objects (and also "virtual" vtables or dictionary
in trait bounds). One complication was that variance for
associated types is less obvious, since they can be projected out
and put to myriad uses, so it's not clear when it is safe to allow
X<A>::Bar to vary (or indeed just what that means). Moreover (as
covered below) all inputs on any trait with an associated type had
to be invariant, limiting the applicability. Finally, the
annotations (MarkerTrait, PhantomFn) needed to ensure that all
trait type parameters had a variance were confusing and annoying
for little benefit.
Just for historical reference, I am going to preserve some text indicating how one could interpret variance and trait matching.
Variance and object types
Just as with structs and enums, we can decide the subtyping
relationship between two object types &Trait<A> and &Trait<B>
based on the relationship of A and B. Note that for object
types we ignore the Self type parameter – it is unknown, and
the nature of dynamic dispatch ensures that we will always call a
function that is expected the appropriate Self type. However, we
must be careful with the other type parameters, or else we could
end up calling a function that is expecting one type but provided
another.
To see what I mean, consider a trait like so:
#![allow(unused)] fn main() { trait ConvertTo<A> { fn convertTo(&self) -> A; } }
Intuitively, If we had one object O=&ConvertTo<Object> and another
S=&ConvertTo<String>, then S <: O because String <: Object
(presuming Java-like "string" and "object" types, my go to examples
for subtyping). The actual algorithm would be to compare the
(explicit) type parameters pairwise respecting their variance: here,
the type parameter A is covariant (it appears only in a return
position), and hence we require that String <: Object.
You'll note though that we did not consider the binding for the
(implicit) Self type parameter: in fact, it is unknown, so that's
good. The reason we can ignore that parameter is precisely because we
don't need to know its value until a call occurs, and at that time (as
you said) the dynamic nature of virtual dispatch means the code we run
will be correct for whatever value Self happens to be bound to for
the particular object whose method we called. Self is thus different
from A, because the caller requires that A be known in order to
know the return type of the method convertTo(). (As an aside, we
have rules preventing methods where Self appears outside of the
receiver position from being called via an object.)
Trait variance and vtable resolution
But traits aren't only used with objects. They're also used when deciding whether a given impl satisfies a given trait bound. To set the scene here, imagine I had a function:
fn convertAll<A,T:ConvertTo<A>>(v: &[T]) { ... }
Now imagine that I have an implementation of ConvertTo for Object:
impl ConvertTo<i32> for Object { ... }
And I want to call convertAll on an array of strings. Suppose
further that for whatever reason I specifically supply the value of
String for the type parameter T:
let mut vector = vec!["string", ...];
convertAll::<i32, String>(vector);
Is this legal? To put another way, can we apply the impl for
Object to the type String? The answer is yes, but to see why
we have to expand out what will happen:
-
convertAllwill create a pointer to one of the entries in the vector, which will have type&String -
It will then call the impl of
convertTo()that is intended for use with objects. This has the typefn(self: &Object) -> i32.It is OK to provide a value for
selfof type&Stringbecause&String <: &Object.
OK, so intuitively we want this to be legal, so let's bring this back
to variance and see whether we are computing the correct result. We
must first figure out how to phrase the question "is an impl for
Object,i32 usable where an impl for String,i32 is expected?"
Maybe it's helpful to think of a dictionary-passing implementation of
type classes. In that case, convertAll() takes an implicit parameter
representing the impl. In short, we have an impl of type:
V_O = ConvertTo<i32> for Object
and the function prototype expects an impl of type:
V_S = ConvertTo<i32> for String
As with any argument, this is legal if the type of the value given
(V_O) is a subtype of the type expected (V_S). So is V_O <: V_S?
The answer will depend on the variance of the various parameters. In
this case, because the Self parameter is contravariant and A is
covariant, it means that:
V_O <: V_S iff
i32 <: i32
String <: Object
These conditions are satisfied and so we are happy.
Variance and associated types
Traits with associated types – or at minimum projection expressions – must be invariant with respect to all of their inputs. To see why this makes sense, consider what subtyping for a trait reference means:
<T as Trait> <: <U as Trait>
means that if I know that T as Trait, I also know that U as Trait. Moreover, if you think of it as dictionary passing style,
it means that a dictionary for <T as Trait> is safe to use where
a dictionary for <U as Trait> is expected.
The problem is that when you can project types out from <T as Trait>, the relationship to types projected out of <U as Trait>
is completely unknown unless T==U (see #21726 for more
details). Making Trait invariant ensures that this is true.
Another related reason is that if we didn't make traits with associated types invariant, then projection is no longer a function with a single result. Consider:
trait Identity { type Out; fn foo(&self); }
impl<T> Identity for T { type Out = T; ... }
Now if I have <&'static () as Identity>::Out, this can be
validly derived as &'a () for any 'a:
<&'a () as Identity> <: <&'static () as Identity>
if &'static () < : &'a () -- Identity is contravariant in Self
if 'static : 'a -- Subtyping rules for relations
This change otoh means that <'static () as Identity>::Out is
always &'static () (which might then be upcast to 'a (),
separately). This was helpful in solving #21750.
Coherence
NOTE: this is based on notes by @lcnr
Coherence checking is what detects both of trait impls and inherent impls overlapping with others.
(reminder: inherent impls are impls of concrete types like impl MyStruct {})
Overlapping trait impls always produce an error, while overlapping inherent impls result in an error only if they have methods with the same name.
Checking for overlaps is split in two parts. First there's the overlap check(s), which finds overlaps between traits and inherent implementations that the compiler currently knows about.
However, Coherence also results in an error if any other impls could exist, even if they are currently unknown. This affects impls which may get added to upstream crates in a backwards compatible way, and impls from downstream crates. This is called the Orphan check.
Overlap checks
Overlap checks are performed for both inherent impls, and for trait impls. This uses the same overlap checking code, really done as two separate analyses. Overlap checks always consider pairs of implementations, comparing them to each other.
Overlap checking for inherent impl blocks is done through fn check_item in coherence/inherent_impls_overlap.rs),
where you can very clearly see that (at least for small n), the check really performs n^2
comparisons between impls.
In the case of traits, this check is currently done as part of building the specialization graph, to handle specializing impls overlapping with their parent, but this may change in the future.
In both cases, all pairs of impls are checked for overlap.
Overlapping is sometimes partially allowed:
- for marker traits
- under specialization
but normally isn't.
The overlap check has various modes (see OverlapMode).
Importantly, there's the explicit negative impl check, and the implicit negative impl check.
Both try to prove that an overlap is definitely impossible.
The explicit negative impl check
This check is done in impl_intersection_has_negative_obligation.
This check tries to find a negative trait implementation. For example:
#![allow(unused)] fn main() { struct MyCustomErrorType; // both in your own crate impl From<&str> for MyCustomErrorType {} impl<E> From<E> for MyCustomErrorType where E: Error {} }
In this example, we'd get:
MyCustomErrorType: From<&str> and MyCustomErrorType: From<?E>, giving ?E = &str.
And thus, these two implementations would overlap.
However, libstd provides &str: !Error, and therefore guarantees that there
will never be a positive implementation of &str: Error, and thus there is no overlap.
Note that for this kind of negative impl check, we must have explicit negative implementations provided. This is not currently stable.
The implicit negative impl check
This check is done in impl_intersection_has_impossible_obligation,
and does not rely on negative trait implementations and is stable.
Let's say there's a
#![allow(unused)] fn main() { impl From<MyLocalType> for Box<dyn Error> {} // in your own crate impl<E> From<E> for Box<dyn Error> where E: Error {} // in std }
This would give: Box<dyn Error>: From<MyLocalType>, and Box<dyn Error>: From<?E>,
giving ?E = MyLocalType.
In your crate there's no MyLocalType: Error, downstream crates cannot implement Error (a remote trait) for MyLocalType (a remote type).
Therefore, these two impls do not overlap.
Importantly, this works even if there isn't a impl !Error for MyLocalType.
Opaque types (type alias impl Trait)
Opaque types are syntax to declare an opaque type alias that only exposes a specific set of traits as their interface; the concrete type in the background is inferred from a certain set of use sites of the opaque type.
This is expressed by using impl Trait within type aliases, for example:
type Foo = impl Bar;
This declares an opaque type named Foo, of which the only information is that
it implements Bar. Therefore, any of Bar's interface can be used on a Foo,
but nothing else (regardless of whether it implements any other traits).
Since there needs to be a concrete background type, you can (as of January 2021) express that type by using the opaque type in a "defining use site".
struct Struct;
impl Bar for Struct { /* stuff */ }
fn foo() -> Foo {
Struct
}
Any other "defining use site" needs to produce the exact same type.
Defining use site(s)
Currently only the return value of a function can be a defining use site of an opaque type (and only if the return type of that function contains the opaque type).
The defining use of an opaque type can be any code within the parent of the opaque type definition. This includes any siblings of the opaque type and all children of the siblings.
The initiative for "not causing fatal brain damage to developers due to accidentally running infinite loops in their brain while trying to comprehend what the type system is doing" has decided to disallow children of opaque types to be defining use sites.
Associated opaque types
Associated opaque types can be defined by any other associated item
on the same trait impl or a child of these associated items. For instance:
trait Baz {
type Foo;
fn foo() -> Self::Foo;
}
struct Quux;
impl Baz for Quux {
type Foo = impl Bar;
fn foo() -> Self::Foo { ... }
}
Inference of opaque types (impl Trait)
This page describes how the compiler infers the hidden type for an opaque type. This kind of type inference is particularly complex because, unlike other kinds of type inference, it can work across functions and function bodies.
Running example
To help explain how it works, let's consider an example.
mod m { pub type Seq<T> = impl IntoIterator<Item = T>; pub fn produce_singleton<T>(t: T) -> Seq<T> { vec![t] } pub fn produce_doubleton<T>(t: T, u: T) -> Seq<T> { vec![t, u] } } fn is_send<T: Send>(_: &T) {} pub fn main() { let elems = m::produce_singleton(22); is_send(&elems); for elem in elems { println!("elem = {:?}", elem); } }
In this code, the opaque type is Seq<T>.
Its defining scope is the module m.
Its hidden type is Vec<T>,
which is inferred from m::produce_singleton and m::produce_doubleton.
In the main function, the opaque type is out of its defining scope.
When main calls m::produce_singleton, it gets back a reference to the opaque type Seq<i32>.
The is_send call checks that Seq<i32>: Send.
Send is not listed amongst the bounds of the impl trait,
but because of auto-trait leakage, we are able to infer that it holds.
The for loop desugaring requires that Seq<T>: IntoIterator,
which is provable from the bounds declared on Seq<T>.
Type-checking main
Let's start by looking what happens when we type-check main.
Initially we invoke produce_singleton and the return type is an opaque type
OpaqueTy.
Type-checking the for loop
The for loop desugars the in elems part to IntoIterator::into_iter(elems).
elems is of type Seq<T>, so the type checker registers a Seq<T>: IntoIterator obligation.
This obligation is trivially satisfied,
because Seq<T> is an opaque type (impl IntoIterator<Item = T>) that has a bound for the trait.
Similar to how a U: Foo where bound allows U to trivially satisfy Foo,
opaque types' bounds are available to the type checker and are used to fulfill obligations.
The type of elem in the for loop is inferred to be <Seq<T> as IntoIterator>::Item, which is T.
At no point is the type checker interested in the hidden type.
Type-checking the is_send call
When trying to prove auto trait bounds,
we first repeat the process as above,
to see if the auto trait is in the bound list of the opaque type.
If that fails, we reveal the hidden type of the opaque type,
but only to prove this specific trait bound, not in general.
Revealing is done by invoking the type_of query on the DefId of the opaque type.
The query will internally request the hidden types from the defining function(s)
and return that (see the section on type_of for more details).
Flowchart of type checking steps
flowchart TD
TypeChecking["type checking `main`"]
subgraph TypeOfSeq["type_of(Seq<T>) query"]
WalkModuleHir["Walk the HIR for the module `m`\nto find the hidden types from each\nfunction/const/static within"]
VisitProduceSingleton["visit `produce_singleton`"]
InterimType["`produce_singleton` hidden type is `Vec<T>`\nkeep searching"]
VisitProduceDoubleton["visit `produce_doubleton`"]
CompareType["`produce_doubleton` hidden type is also Vec<T>\nthis matches what we saw before ✅"]
Done["No more items to look at in scope\nReturn `Vec<T>`"]
end
BorrowCheckProduceSingleton["`borrow_check(produce_singleton)`"]
TypeCheckProduceSingleton["`type_check(produce_singleton)`"]
BorrowCheckProduceDoubleton["`borrow_check(produce_doubleton)`"]
TypeCheckProduceDoubleton["`type_check(produce_doubleton)`"]
Substitute["Substitute `T => u32`,\nyielding `Vec<i32>` as the hidden type"]
CheckSend["Check that `Vec<i32>: Send` ✅"]
TypeChecking -- trait code for auto traits --> TypeOfSeq
TypeOfSeq --> WalkModuleHir
WalkModuleHir --> VisitProduceSingleton
VisitProduceSingleton --> BorrowCheckProduceSingleton
BorrowCheckProduceSingleton --> TypeCheckProduceSingleton
TypeCheckProduceSingleton --> InterimType
InterimType --> VisitProduceDoubleton
VisitProduceDoubleton --> BorrowCheckProduceDoubleton
BorrowCheckProduceDoubleton --> TypeCheckProduceDoubleton
TypeCheckProduceDoubleton --> CompareType --> Done
Done --> Substitute --> CheckSend
Within the type_of query
The type_of query, when applied to an opaque type O, returns the hidden type.
That hidden type is computed by combining the results
from each constraining function within the defining scope of O.
flowchart TD
TypeOf["type_of query"]
TypeOf -- find_opaque_ty_constraints --> FindOpaqueTyConstraints
FindOpaqueTyConstraints --> Iterate
Iterate["Iterate over each item in defining scope"]
Iterate -- For each item --> TypeCheck
TypeCheck["Check typeck(I) to see if it constraints O"]
TypeCheck -- I does not\nconstrain O --> Iterate
TypeCheck -- I constrains O --> BorrowCheck
BorrowCheck["Invoke mir_borrowck(I) to get hidden type\nfor O computed by I"]
BorrowCheck --> PreviousType
PreviousType["Hidden type from I\nsame as any previous hidden type\nfound so far?"]
PreviousType -- Yes --> Complete
PreviousType -- No --> ReportError
ReportError["Report an error"]
ReportError --> Complete["Item I complete"]
Complete --> Iterate
FindOpaqueTyConstraints -- All constraints found --> Done
Done["Done"]
Relating an opaque type to another type
There is one central place where an opaque type gets its hidden type constrained,
and that is the handle_opaque_type function.
Amusingly it takes two types, so you can pass any two types,
but one of them should be an opaque type.
The order is only important for diagnostics.
flowchart TD
subgraph typecheck["type check comparison routines"]
equate.rs
sub.rs
lub.rs
end
typecheck --> TwoSimul
subgraph handleopaquetype["infcx.handle_opaque_type"]
TwoSimul["Defining two opaque types simultaneously?"]
TwoSimul -- Yes --> ReportError["Report error"]
TwoSimul -- No --> MayDefine -- Yes --> RegisterOpaqueType --> AlreadyHasValue
MayDefine -- No --> ReportError
MayDefine["In defining scope OR in query?"]
AlreadyHasValue["Opaque type X already has\na registered value?"]
AlreadyHasValue -- No --> Obligations["Register opaque type bounds\nas obligations for hidden type"]
RegisterOpaqueType["Register opaque type with\nother type as value"]
AlreadyHasValue -- Yes --> EquateOpaqueTypes["Equate new hidden type\nwith old hidden type"]
end
Interactions with queries
When queries handle opaque types, they cannot figure out whether they are in a defining scope, so they just assume they are.
The registered hidden types are stored into the QueryResponse struct
in the opaque_types field (the function
take_opaque_types_for_query_response reads them out).
When the QueryResponse is instantiated into the surrounding infcx in
query_response_substitution_guess,
we convert each hidden type constraint by invoking handle_opaque_type (as above).
There is one bit of "weirdness". The instantiated opaque types have an order (if one opaque type was compared with another, and we have to pick one opaque type to use as the one that gets its hidden type assigned). We use the one that is considered "expected". But really both of the opaque types may have defining uses. When the query result is instantiated, that will be re-evaluated from the context that is using the query. The final context (typeck of a function, mir borrowck or wf-checks) will know which opaque type can actually be instantiated and then handle it correctly.
Within the MIR borrow checker
The MIR borrow checker relates things via nll_relate and only cares about regions.
Any type relation will trigger the binding of hidden types,
so the borrow checker is doing the same thing as the type checker,
but ignores obviously dead code (e.g. after a panic).
The borrow checker is also the source of truth when it comes to hidden types,
as it is the only one who can properly figure out what lifetimes on the hidden type correspond
to which lifetimes on the opaque type declaration.
Backwards compatibility hacks
impl Trait in return position has various quirks that were not part
of any RFCs and are likely accidental stabilization.
To support these,
the replace_opaque_types_with_inference_vars is being used to reintroduce the previous behaviour.
There are three backwards compatibility hacks:
-
All return sites share the same inference variable, so some return sites may only compile if another return site uses a concrete type.
#![allow(unused)] fn main() { fn foo() -> impl Debug { if false { return std::iter::empty().collect(); } vec![42] } } -
Associated type equality constraints for
impl Traitcan be used as long as the hidden type satisfies the trait bounds on the associated type. The opaqueimpl Traitsignature does not need to satisfy them.#![allow(unused)] fn main() { trait Duh {} impl Duh for i32 {} trait Trait { type Assoc: Duh; } // the fact that `R` is the `::Output` projection on `F` causes // an intermediate inference var to be generated which is then later // compared against the actually found `Assoc` type. impl<R: Duh, F: FnMut() -> R> Trait for F { type Assoc = R; } // The `impl Send` here is then later compared against the inference var // created, causing the inference var to be set to `impl Send` instead of // the hidden type. We already have obligations registered on the inference // var to make it uphold the `: Duh` bound on `Trait::Assoc`. The opaque // type does not implement `Duh`, even if its hidden type does. // Lazy TAIT would error out, but we inserted a hack to make it work again, // keeping backwards compatibility. fn foo() -> impl Trait<Assoc = impl Send> { || 42 } } -
Closures cannot create hidden types for their parent function's
impl Trait. This point is mostly moot, because of point 1 introducing inference vars, so the closure only ever sees the inference var, but should we fix 1, this will become a problem.
Return Position Impl Trait In Trait
Return-position impl trait in trait (RPITIT) is conceptually (and as of #112988, literally) sugar that turns RPITs in trait methods into generic associated types (GATs) without the user having to define that GAT either on the trait side or impl side.
RPITIT was originally implemented in #101224, which added support for async fn in trait (AFIT), since the implementation for RPITIT came for free as a part of implementing AFIT which had been RFC'd previously. It was then RFC'd independently in RFC 3425, which was recently approved by T-lang.
How does it work?
This doc is ordered mostly via the compilation pipeline:
- AST lowering (AST -> HIR)
- HIR ty lowering (HIR -> rustc_middle::ty data types)
- typeck
AST lowering
AST lowering for RPITITs is almost the same as lowering RPITs. We
still lower them as
hir::ItemKind::OpaqueTy.
The two differences are that:
We record in_trait for the opaque. This will signify that the opaque
is an RPITIT for HIR ty lowering, diagnostics that deal with HIR, etc.
We record lifetime_mappings for the opaque type, described below.
Aside: Opaque lifetime duplication
All opaques (not just RPITITs) end up duplicating their captured lifetimes into new lifetime parameters local to the opaque. The main reason we do this is because RPITs need to be able to "reify"1 any captured late-bound arguments, or make them into early-bound ones. This is so they can be used as generic args for the opaque, and later to instantiate hidden types. Since we don't know which lifetimes are early- or late-bound during AST lowering, we just do this for all lifetimes.
This is compiler-errors terminology, I'm not claiming it's accurate :^)
The main addition for RPITITs is that during lowering we track the
relationship between the captured lifetimes and the corresponding
duplicated lifetimes in an additional field,
OpaqueTy::lifetime_mapping.
We use this lifetime mapping later on in predicates_of to install
bounds that enforce equality between these duplicated lifetimes and
their source lifetimes in order to properly typecheck these GATs, which
will be discussed below.
Note
It may be better if we were able to lower without duplicates and for that I think we would need to stop distinguishing between early and late bound lifetimes. So we would need a solution like Account for late-bound lifetimes in generics #103448 and then also a PR similar to Inherit function lifetimes for impl-trait #103449.
HIR ty lowering
The main change to HIR ty lowering is that we lower hir::TyKind::OpaqueDef
for an RPITIT to a projection instead of an opaque, using a newly
synthesized def-id for a new associated type in the trait. We'll
describe how exactly we get this def-id in the next section.
This means that any time we call lower_ty on the RPITIT, we end up
getting a projection back instead of an opaque. This projection can then
be normalized to the right value -- either the original opaque if we're
in the trait, or the inferred type of the RPITIT if we're in an impl.
Lowering to synthetic associated types
Using query feeding, we synthesize new associated types on both the trait side and impl side for RPITITs that show up in methods.
Lowering RPITITs in traits
When tcx.associated_item_def_ids(trait_def_id) is called on a trait to
gather all of the trait's associated types, the query previously just
returned the def-ids of the HIR items that are children of the trait.
After #112988, additionally, for each method in the trait, we add the
def-ids returned by
tcx.associated_types_for_impl_traits_in_associated_fn(trait_method_def_id),
which walks through each trait method, gathers any RPITITs that show up
in the signature, and then calls
associated_type_for_impl_trait_in_trait for each RPITIT, which
synthesizes a new associated type.
Lowering RPITITs in impls
Similarly, along with the impl's HIR items, for each impl method, we
additionally add all of the
associated_types_for_impl_traits_in_associated_fn for the impl method.
This calls associated_type_for_impl_trait_in_impl, which will
synthesize an associated type definition for each RPITIT that comes from
the corresponding trait method.
Synthesizing new associated types
We use query feeding
(TyCtxtAt::create_def)
to synthesize a new def-id for the synthetic GATs for each RPITIT.
Locally, most of rustc's queries match on the HIR of an item to compute
their values. Since the RPITIT doesn't really have HIR associated with
it, or at least not HIR that corresponds to an associated type, we must
compute many queries eagerly and
feed them, like
opt_def_kind, associated_item, visibility, anddefaultness.
The values for most of these queries is obvious, since the RPITIT
conceptually inherits most of its information from the parent function
(e.g. visibility), or because it's trivially knowable because it's an
associated type (opt_def_kind).
Some other queries are more involved, or cannot be fed, and we document the interesting ones of those below:
generics_of for the trait
The GAT for an RPITIT conceptually inherits the same generics as the RPIT it comes from. However, instead of having the method as the generics' parent, the trait is the parent.
Currently we get away with taking the RPIT's generics and method generics and flattening them both into a new generics list, preserving the def-id of each of the parameters. (This may cause issues with def-ids having the wrong parents, but in the worst case this will cause diagnostics issues. If this ends up being an issue, we can synthesize new def-ids for generic params whose parent is the GAT.)
An illustrated example
#![allow(unused)] fn main() { trait Foo { fn method<'early: 'early, 'late, T>() -> impl Sized + Captures<'early, 'late>; } }
Would desugar to...
#![allow(unused)] fn main() { trait Foo { // vvvvvvvvv method's generics // vvvvvvvvvvvvvvvvvvvvvvvv opaque's generics type Gat<'early, T, 'early_duplicated, 'late>: Sized + Captures<'early_duplicated, 'late>; fn method<'early: 'early, 'late, T>() -> Self::Gat<'early, T, 'early, 'late>; } }
generics_of for the impl
The generics for an impl's GAT are a bit more interesting. They are composed of RPITIT's own generics (from the trait definition), appended onto the impl's methods generics. This has the same issue as above, where the generics for the GAT have parameters whose def-ids have the wrong parent, but this should only cause issues in diagnostics.
We could fix this similarly if we were to synthesize new generics def-ids, but this can be done later in a forwards-compatible way, perhaps by a interested new contributor.
opt_rpitit_info
Some queries rely on computing information that would result in cycles
if we were to feed them eagerly, like explicit_predicates_of.
Therefore we defer to the predicates_of provider to return the right
value for our RPITIT's GAT. We do this by detecting early on in the
query if the associated type is synthetic by using
opt_rpitit_info,
which returns Some if the associated type is synthetic.
Then, during a query like explicit_predicates_of, we can detect if an
associated type is synthetic like:
#![allow(unused)] fn main() { fn explicit_predicates_of(tcx: TyCtxt<'_>, def_id: LocalDefId) -> ... { if let Some(rpitit_info) = tcx.opt_rpitit_info(def_id) { // Do something special for RPITITs... return ...; } // The regular computation which relies on access to the HIR of `def_id`. } }
explicit_predicates_of
RPITITs begin by copying the predicates of the method that defined it, both on the trait and impl side.
Additionally, we install "bidirectional outlives" predicates. Specifically, we add region-outlives predicates in both directions for each captured early-bound lifetime that constrains it to be equal to the duplicated early-bound lifetime that results from lowering. This is best illustrated in an example:
#![allow(unused)] fn main() { trait Foo<'a> { fn bar() -> impl Sized + 'a; } // Desugars into... trait Foo<'a> { type Gat<'a_duplicated>: Sized + 'a where 'a: 'a_duplicated, 'a_duplicated: 'a; //~^ Specifically, we should be able to assume that the // duplicated `'a_duplicated` lifetime always stays in // sync with the `'a` lifetime. fn bar() -> Self::Gat<'a>; } }
assumed_wf_types
The GATs in both the trait and impl inherit the assumed_wf_types of
the trait method that defines the RPITIT. This is to make sure that the
following code is well formed when lowered.
#![allow(unused)] fn main() { trait Foo { fn iter<'a, T>(x: &'a [T]) -> impl Iterator<Item = &'a T>; } // which is lowered to... trait FooDesugared { type Iter<'a, T>: Iterator<Item = &'a T>; //~^ assumed wf: `&'a [T]` // Without assumed wf types, the GAT would not be well-formed on its own. fn iter<'a, T>(x: &'a [T]) -> Self::Iter<'a, T>; } }
Because assumed_wf_types is only defined for local def ids, in order
to properly implement assumed_wf_types for impls of foreign traits
with RPITs, we need to encode the assumed wf types of RPITITs in an
extern query
assumed_wf_types_for_rpitit.
Typechecking
The RPITIT inference algorithm
The RPITIT inference algorithm is implemented in
collect_return_position_impl_trait_in_trait_tys.
High-level: Given a impl method and a trait method, we take the trait method and instantiate each RPITIT in the signature with an infer var. We then equate this trait method signature with the impl method signature, and process all obligations that fall out in order to infer the type of all of the RPITITs in the method.
The method is also responsible for making sure that the hidden types for
each RPITIT actually satisfy the bounds of the impl Trait, i.e. that
if we infer impl Trait = Foo, that Foo: Trait holds.
An example...
#![allow(unused)] #![feature(return_position_impl_trait_in_trait)] fn main() { use std::ops::Deref; trait Foo { fn bar() -> impl Deref<Target = impl Sized>; // ^- RPITIT ?0 ^- RPITIT ?1 } impl Foo for () { fn bar() -> Box<String> { Box::new(String::new()) } } }
We end up with the trait signature that looks like fn() -> ?0, and
nested obligations ?0: Deref<Target = ?1>, ?1: Sized. The impl
signature is fn() -> Box<String>.
Equating these signatures gives us ?0 = Box<String>, which then after
processing the obligation Box<String>: Deref<Target = ?1> gives us ?1 = String, and the other obligation String: Sized evaluates to true.
By the end of the algorithm, we end up with a mapping between associated
type def-ids to concrete types inferred from the signature. We can then
use this mapping to implement type_of for the synthetic associated
types in the impl, since this mapping describes the type that should
come after the = in type Assoc = ... for each RPITIT.
Implied bounds in RPITIT hidden type inference
Since collect_return_position_impl_trait_in_trait_tys does fulfillment and
region resolution, we must provide it assumed_wf_types so that we can prove
region obligations with the same expected implied bounds as
compare_method_predicate_entailment does.
Since the return type of a method is understood to be one of the assumed WF types, and we eagerly fold the return type with inference variables to do opaque type inference, after opaque type inference, the return type will resolve to contain the hidden types of the RPITITs. this would mean that the hidden types of the RPITITs would be assumed to be well-formed without having independently proven that they are. This resulted in a subtle unsoundness bug. In order to prevent this cyclic reasoning, we instead replace the hidden types of the RPITITs in the return type of the method with placeholders, which lead to no implied well-formedness bounds.
Default trait body
Type-checking a default trait body, like:
#![allow(unused)] fn main() { trait Foo { fn bar() -> impl Sized { 1i32 } } }
requires one interesting hack. We need to install a projection predicate
into the param-env of Foo::bar allowing us to assume that the RPITIT's
GAT normalizes to the RPITIT's opaque type. This relies on the
observation that a trait method and RPITIT's GAT will always be "in
sync". That is, one will only ever be overridden if the other one is as
well.
Compare this to a similar desugaring of the code above, which would fail because we cannot rely on this same assumption:
#![allow(unused)] #![feature(impl_trait_in_assoc_type)] #![feature(associated_type_defaults)] fn main() { trait Foo { type RPITIT = impl Sized; fn bar() -> Self::RPITIT { 01i32 } } }
Failing because a down-stream impl could theoretically provide an
implementation for RPITIT without providing an implementation of
foo:
error[E0308]: mismatched types
--> src/lib.rs:8:9
|
5 | type RPITIT = impl Sized;
| ------------------------- associated type defaults can't be assumed inside the trait defining them
6 |
7 | fn bar() -> Self::RPITIT {
| ------------ expected `<Self as Foo>::RPITIT` because of return type
8 | 01i32
| ^^^^^ expected associated type, found `i32`
|
= note: expected associated type `<Self as Foo>::RPITIT`
found type `i32`
Well-formedness checking
We check well-formedness of RPITITs just like regular associated types.
Since we added lifetime bounds in predicates_of that link the
duplicated early-bound lifetimes to their original lifetimes, and we
implemented assumed_wf_types which inherits the WF types of the method
from which the RPITIT originates (#113704), we have no issues
WF-checking the GAT as if it were a regular GAT.
What's broken, what's weird, etc.
Specialization is super busted
The "default trait methods" described above does not interact well with
specialization, because we only install those projection bounds in trait
default methods, and not in impl methods. Given that specialization is
already pretty busted, I won't go into detail, but it's currently a bug
tracked in:
* tests/ui/impl-trait/in-trait/specialization-broken.rs
Projections don't have variances
This code fails because projections don't have variances:
#![allow(unused)] #![feature(return_position_impl_trait_in_trait)] fn main() { trait Foo { // Note that the RPITIT below does *not* capture `'lt`. fn bar<'lt: 'lt>() -> impl Eq; } fn test<'a, 'b, T: Foo>() -> bool { <T as Foo>::bar::<'a>() == <T as Foo>::bar::<'b>() //~^ ERROR // (requires that `'a == 'b`) } }
This is because we can't relate <T as Foo>::Rpitit<'a> and <T as Foo>::Rpitit<'b>, even if they don't capture their lifetime. If we were
using regular opaque types, this would work, because they would be
bivariant in that lifetime parameter:
#![allow(unused)] #![feature(return_position_impl_trait_in_trait)] fn main() { fn bar<'lt: 'lt>() -> impl Eq { () } fn test<'a, 'b>() -> bool { bar::<'a>() == bar::<'b>() } }
This is probably okay though, since RPITITs will likely have their captures behavior changed to capture all in-scope lifetimes anyways. This could also be relaxed later in a forwards-compatible way if we were to consider variances of RPITITs when relating projections.
Opaque types region inference restrictions
In this chapter we discuss the various restrictions we impose on the generic arguments of
opaque types when defining their hidden types
Opaque<'a, 'b, .., A, B, ..> := SomeHiddenType.
These restrictions are implemented in borrow checking (Source) as it is the final step opaque types inference.
Background: type and const generic arguments
For type arguments, two restrictions are necessary: each type argument must be (1) a type parameter and (2) is unique among the generic arguments. The same is applied to const arguments.
Example of case (1):
#![allow(unused)] fn main() { type Opaque<X> = impl Sized; // `T` is a type parameter. // Opaque<T> := (); fn good<T>() -> Opaque<T> {} // `()` is not a type parameter. // Opaque<()> := (); fn bad() -> Opaque<()> {} //~ ERROR }
Example of case (2):
#![allow(unused)] fn main() { type Opaque<X, Y> = impl Sized; // `T` and `U` are unique in the generic args. // Opaque<T, U> := T; fn good<T, U>(t: T, _u: U) -> Opaque<T, U> { t } // `T` appears twice in the generic args. // Opaque<T, T> := T; fn bad<T>(t: T) -> Opaque<T, T> { t } //~ ERROR }
Motivation: In the first case Opaque<()> := (), the hidden type is ambiguous because
it is compatible with two different interpretaions: Opaque<X> := X and Opaque<X> := ().
Similarly for the second case Opaque<T, T> := T, it is ambiguous whether it should be
interpreted as Opaque<X, Y> := X or as Opaque<X, Y> := Y.
Because of this ambiguity, both cases are rejected as invalid defining uses.
Uniqueness restriction
Each lifetime argument must be unique in the arguments list and must not be 'static.
This is in order to avoid an ambiguity with hidden type inference similar to the case of
type parameters.
For example, the invalid defining use below Opaque<'static> := Inv<'static> is compatible with
both Opaque<'x> := Inv<'static> and Opaque<'x> := Inv<'x>.
#![allow(unused)] fn main() { type Opaque<'x> = impl Sized + 'x; type Inv<'a> = Option<*mut &'a ()>; fn good<'a>() -> Opaque<'a> { Inv::<'static>::None } fn bad() -> Opaque<'static> { Inv::<'static>::None } //~^ ERROR }
#![allow(unused)] fn main() { type Opaque<'x, 'y> = impl Trait<'x, 'y>; fn good<'a, 'b>() -> Opaque<'a, 'b> {} fn bad<'a>() -> Opaque<'a, 'a> {} //~^ ERROR }
Semantic lifetime equality: One complexity with lifetimes compared to type parameters is that two lifetimes that are syntactically different may be semantically equal. Therefore, we need to be cautious when verifying that the lifetimes are unique.
#![allow(unused)] fn main() { // This is also invalid because `'a` is *semantically* equal to `'static`. fn still_bad_1<'a: 'static>() -> Opaque<'a> {} //~^ Should error! // This is also invalid because `'a` and `'b` are *semantically* equal. fn still_bad_2<'a: 'b, 'b: 'a>() -> Opaque<'a, 'b> {} //~^ Should error! }
An exception to uniqueness rule
An exception to the uniqueness rule above is when the bounds at the opaque type's definition require
a lifetime parameter to be equal to another one or to the 'static lifetime.
#![allow(unused)] fn main() { // The definition requires `'x` to be equal to `'static`. type Opaque<'x: 'static> = impl Sized + 'x; fn good() -> Opaque<'static> {} }
Motivation: an attempt to implement the uniqueness restriction for RPITs resulted in a breakage found by crater. This can be mitigated by this exception to the rule. An example of the code that would otherwise break:
#![allow(unused)] fn main() { struct Type<'a>(&'a ()); impl<'a> Type<'a> { // `'b == 'a` fn do_stuff<'b: 'a>(&'b self) -> impl Trait<'a, 'b> {} } }
Why this is correct: for such a defining use like Opaque<'a, 'a> := &'a str,
it can be interpreted in either way—either as Opaque<'x, 'y> := &'x str or as
Opaque<'x, 'y> := &'y str and it wouldn't matter because every use of Opaque
will guarantee that both parameters are equal as per the well-formedness rules.
Universal lifetimes restriction
Only universally quantified lifetimes are allowed in the opaque type arguments. This includes lifetime parameters and placeholders.
#![allow(unused)] fn main() { type Opaque<'x> = impl Sized + 'x; fn test<'a>() -> Opaque<'a> { // `Opaque<'empty> := ()` let _: Opaque<'_> = (); //~^ ERROR } }
Motivation:
This makes the lifetime and type arguments behave consistently but this is only as a bonus.
The real reason behind this restriction is purely technical, as the member constraints algorithm
faces a fundamental limitation:
When encountering an opaque type definition Opaque<'?1> := &'?2 u8,
a member constraint '?2 member-of ['static, '?1] is registered.
In order for the algorithm to pick the right choice, the complete set of "outlives" relationships
between the choice regions ['static, '?1] must already be known before doing the region
inference. This can be satisfied only if each choice region is either:
- a universal region, i.e.
RegionKind::Re{EarlyParam,LateParam,Placeholder,Static}, because the relations between universal regions are completely known, prior to region inference, from the explicit and implied bounds. - or an existential region that is "strictly equal" to a universal region. Strict lifetime equality is defined below and is required here because it is the only type of equality that can be evaluated prior to full region inference.
Strict lifetime equality: We say that two lifetimes are strictly equal if there are bidirectional outlives constraints between them. In NLL terms, this means the lifetimes are part of the same SCC. Importantly this type of equality can be evaluated prior to full region inference (but of course after constraint collection). The other type of equality is when region inference ends up giving two lifetimes variables the same value even if they are not strictly equal. See #113971 for how we used to conflate the difference.
interaction with "once modulo regions" restriction
In the example above, note the opaque type in the signature is Opaque<'a> and the one in the
invalid defining use is Opaque<'empty>.
In the proposed MiniTAIT plan, namely the "once modulo regions" rule,
we already disallow this.
Although it might appear that "universal lifetimes" restriction becomes redundant as it logically
follows from "MiniTAIT" restrictions, the subsequent related discussion on lifetime equality and
closures remains relevant.
Closure restrictions
When the opaque type is defined in a closure/coroutine/inline-const body, universal lifetimes that
are "external" to the closure are not allowed in the opaque type arguments.
External regions are defined in RegionClassification::External
Example: (This one happens to compile in the current nightly but more practical examples are already rejected with confusing errors.)
#![allow(unused)] fn main() { type Opaque<'x> = impl Sized + 'x; fn test<'a>() -> Opaque<'a> { let _ = || { // `'a` is external to the closure let _: Opaque<'a> = (); //~^ Should be an error! }; () } }
Motivation: In closure bodies, external lifetimes, although being categorized as "universal" lifetimes, behave more like existential lifetimes in that the relations between them are not known ahead of time, instead their values are inferred just like existential lifetimes and the requirements are propagated back to the parent fn. This breaks the member constraints algorithm as described above:
In order for the algorithm to pick the right choice, the complete set of “outlives” relationships between the choice regions
['static, '?1]must already be known before doing the region inference
Here is an example that details how :
#![allow(unused)] fn main() { type Opaque<'x, 'y> = impl Sized; // fn test<'a, 'b>(s: &'a str) -> impl FnOnce() -> Opaque<'a, 'b> { move || { s } //~^ ERROR hidden type for `Opaque<'_, '_>` captures lifetime that does not appear in bounds } // The above closure body is desugared into something like: fn test::{closure#0}(_upvar: &'?8 str) -> Opaque<'?6, '?7> { return _upvar } // where `['?8, '?6, ?7]` are universal lifetimes *external* to the closure. // There are no known relations between them *inside* the closure. // But in the parent fn it is known that `'?6: '?8`. // // When encountering an opaque definition `Opaque<'?6, '?7> := &'8 str`, // The member constraints algorithm does not know enough to safely make `?8 = '?6`. // For this reason, it errors with a sensible message: // "hidden type captures lifetime that does not appear in bounds". }
Without this restrictions error messages are consfusing and, more impotantly, there is a risk that we accept code the we would likely break in the future because member constraints are super broken in closures.
Output types:
I believe the most common scenario where this causes issues in real-world code is with
closure/async-block output types. It is worth noting that there is a discrepancy between closures
and async blocks that further demonstrates this issue and is attributed to the
hack of replace_opaque_types_with_inference_vars,
which is applied to futures only.
#![allow(unused)] fn main() { type Opaque<'x> = impl Sized + 'x; fn test<'a>() -> impl FnOnce() -> Opaque<'a> { // Output type of the closure is Opaque<'a> // -> hidden type definition happens *inside* the closure // -> rejected. move || {} //~^ ERROR expected generic lifetime parameter, found `'_` } }
#![allow(unused)] fn main() { use std::future::Future; type Opaque<'x> = impl Sized + 'x; fn test<'a>() -> impl Future<Output = Opaque<'a>> { // Output type of the async block is unit `()` // -> hidden type definition happens in the parent fn // -> accepted. async move {} } }
Effects and effect checking
Note: all of this describes the implementation of the unstable effects and
const_trait_impl features. None of this implementation is usable or visible from
stable Rust.
The implementation of const traits and ~const bounds is a limited effect system.
It is used to allow trait bounds on const fn to be used within the const fn for
method calls. Within the function, in order to know whether a method on a trait
bound is const, we need to know whether there is a ~const bound for the trait.
In order to know whether we can instantiate a ~const bound on a const fn, we
need to know whether there is a const_trait impl for the type and trait being
used (or whether the const fn is used at runtime, then any type implementing the
trait is ok, just like with other bounds).
We perform these checks via a const generic boolean that gets attached to all
const fn and const trait. The following sections will explain the desugarings
and the way we perform the checks at call sites.
The const generic boolean is inverted to the meaning of const. In the compiler
it is called host, because it enables "host APIs" like static items, network
access, disk access, random numbers and everything else that isn't available in
const contexts. So false means "const", true means "not const" and if it's
a generic parameter, it means "maybe const" (meaning we're in a const fn or const
trait).
const fn
All const fn have a #[rustc_host] const host: bool generic parameter that is
hidden from users. Any ~const Trait bounds in the generics list or where bounds
of a const fn get converted to Trait<host> + Trait<true> bounds. The Trait<true>
exists so that associated types of the generic param can be used from projections
like <T as Trait>::Assoc, because there are no <T as ~const Trait> projections for now.
#[const_trait] traits
The #[const_trait] attribute gives the marked trait a #[rustc_host] const host: bool
generic parameter. All functions of the trait "inherit" this generic parameter, just like
they have all the regular generic parameters of the trait. Any ~const Trait super-trait
bounds get desugared to Trait<host> + Trait<true> in order to allow using associated
types and consts of the super traits in the trait declaration. This is necessary, because
<Self as SuperTrait>::Assoc is always <Self as SuperTrait<true>>::Assoc as there is
no <Self as ~const SuperTrait> syntax.
typeck performing method and function call checks.
When generic parameters are instantiated for any items, the host generic parameter
is always instantiated as an inference variable. This is a special kind of inference var
that is not part of the type or const inference variables, similar to how we have
special inference variables for type variables that we know to be an integer, but not
yet which one. These separate inference variables fall back to true at
the end of typeck (in fallback_effects) to ensure that let _ = some_fn_item_name;
will keep compiling.
All actually used (in function calls, casts, or anywhere else) function items, will
have the enforce_context_effects method invoked.
It trivially returns if the function being called has no host generic parameter.
In order to error if a non-const function is called in a const context, we have not
yet disabled the const-check logic that happens on MIR, because
enforce_context_effects does not yet perform this check.
The function call's host parameter is then equated to the context's host value,
which almost always trivially succeeds, as it was an inference var. If the inference
var has already been bound (since the function item is invoked twice), the second
invocation checks it against the first.
Pattern and Exhaustiveness Checking
In Rust, pattern matching and bindings have a few very helpful properties. The compiler will check that bindings are irrefutable when made and that match arms are exhaustive.
Pattern usefulness
The central question that usefulness checking answers is: "in this match expression, is that branch redundant?". More precisely, it boils down to computing whether, given a list of patterns we have already seen, a given new pattern might match any new value.
For example, in the following match expression,
we ask in turn whether each pattern might match something
that wasn't matched by the patterns above it.
Here we see the 4th pattern is redundant with the 1st;
that branch will get an "unreachable" warning.
The 3rd pattern may or may not be useful,
depending on whether Foo has other variants than Bar.
Finally, we can ask whether the whole match is exhaustive
by asking whether the wildcard pattern (_)
is useful relative to the list of all the patterns in that match.
Here we can see that _ is useful (it would catch (false, None));
this expression would therefore get a "non-exhaustive match" error.
#![allow(unused)] fn main() { // x: (bool, Option<Foo>) match x { (true, _) => {} // 1 (false, Some(Foo::Bar)) => {} // 2 (false, Some(_)) => {} // 3 (true, None) => {} // 4 } }
Thus usefulness is used for two purposes: detecting unreachable code (which is useful to the user), and ensuring that matches are exhaustive (which is important for soundness, because a match expression can return a value).
Where it happens
This check is done anywhere you can write a pattern: match expressions, if let, let else,
plain let, and function arguments.
#![allow(unused)] fn main() { // `match` // Usefulness can detect unreachable branches and forbid non-exhaustive matches. match foo() { Ok(x) => x, Err(_) => panic!(), } // `if let` // Usefulness can detect unreachable branches. if let Some(x) = foo() { // ... } // `while let` // Usefulness can detect infinite loops and dead loops. while let Some(x) = it.next() { // ... } // Destructuring `let` // Usefulness can forbid non-exhaustive patterns. let Foo::Bar(x, y) = foo(); // Destructuring function arguments // Usefulness can forbid non-exhaustive patterns. fn foo(Foo { x, y }: Foo) { // ... } }
The algorithm
Exhaustiveness checking is run before MIR building in check_match.
It is implemented in the rustc_pattern_analysis crate,
with the core of the algorithm in the usefulness module.
That file contains a detailed description of the algorithm.
Important concepts
Constructors and fields
In the value Pair(Some(0), true), Pair is called the constructor of the value, and Some(0) and
true are its fields. Every matcheable value can be decomposed in this way. Examples of
constructors are: Some, None, (,) (the 2-tuple constructor), Foo {..} (the constructor for
a struct Foo), and 2 (the constructor for the number 2).
Each constructor takes a fixed number of fields; this is called its arity. Pair and (,) have
arity 2, Some has arity 1, None and 42 have arity 0. Each type has a known set of
constructors. Some types have many constructors (like u64) or even an infinitely many (like &str
and &[T]).
Patterns are similar: Pair(Some(_), _) has constructor Pair and two fields. The difference is
that we get some extra pattern-only constructors, namely: the wildcard _, variable bindings,
integer ranges like 0..=10, and variable-length slices like [_, .., _]. We treat or-patterns
separately.
Now to check if a value v matches a pattern p, we check if v's constructor matches p's
constructor, then recursively compare their fields if necessary. A few representative examples:
matches!(v, _) := truematches!((v0, v1), (p0, p1)) := matches!(v0, p0) && matches!(v1, p1)matches!(Foo { a: v0, b: v1 }, Foo { a: p0, b: p1 }) := matches!(v0, p0) && matches!(v1, p1)matches!(Ok(v0), Ok(p0)) := matches!(v0, p0)matches!(Ok(v0), Err(p0)) := false(incompatible variants)matches!(v, 1..=100) := matches!(v, 1) || ... || matches!(v, 100)matches!([v0], [p0, .., p1]) := false(incompatible lengths)matches!([v0, v1, v2], [p0, .., p1]) := matches!(v0, p0) && matches!(v2, p1)
This concept is absolutely central to pattern analysis. The constructor module provides
functions to extract, list and manipulate constructors. This is a useful enough concept that
variations of it can be found in other places of the compiler, like in the MIR-lowering of a match
expression and in some clippy lints.
Constructor grouping and splitting
The pattern-only constructors (_, ranges and variable-length slices) each stand for a set of
normal constructors, e.g. _: Option<T> stands for the set {None, Some} and [_, .., _] stands
for the infinite set {[,], [,,], [,,,], ...} of the slice constructors of arity >= 2.
In order to manage these constructors, we keep them as grouped as possible. For example:
#![allow(unused)] fn main() { match (0, false) { (0 ..=100, true) => {} (50..=150, false) => {} (0 ..=200, _) => {} } }
In this example, all of 0, 1, .., 49 match the same arms, and thus can be treated as a group.
In fact, in this match, the only ranges we need to consider are: 0..50, 50..=100,
101..=150,151..=200 and 201... Similarly:
#![allow(unused)] fn main() { enum Direction { North, South, East, West } let wind = (Direction::North, 0u8); match wind { (Direction::North, 50..) => {} (_, _) => {} } }
Here we can treat all the non-North constructors as a group, giving us only two cases to handle:
North, and everything else.
This is called "constructor splitting" and is crucial to having exhaustiveness run in reasonable time.
Usefulness vs reachability in the presence of empty types
This is likely the subtlest aspect of exhaustiveness. To be fully precise, a match doesn't operate on a value, it operates on a place. In certain unsafe circumstances, it is possible for a place to not contain valid data for its type. This has subtle consequences for empty types. Take the following:
#![allow(unused)] fn main() { enum Void {} let x: u8 = 0; let ptr: *const Void = &x as *const u8 as *const Void; unsafe { match *ptr { _ => println!("Reachable!"), } } }
In this example, ptr is a valid pointer pointing to a place with invalid data. The _ pattern
does not look at the contents of the place *ptr, so this code is ok and the arm is taken. In other
words, despite the place we are inspecting being of type Void, there is a reachable arm. If the
arm had a binding however:
#![allow(unused)] fn main() { #[derive(Copy, Clone)] enum Void {} let x: u8 = 0; let ptr: *const Void = &x as *const u8 as *const Void; unsafe { match *ptr { _a => println!("Unreachable!"), } } }
Here the binding loads the value of type Void from the *ptr place. In this example, this causes
UB since the data is not valid. In the general case, this asserts validity of the data at *ptr.
Either way, this arm will never be taken.
Finally, let's consider the empty match match *ptr {}. If we consider this exhaustive, then
having invalid data at *ptr is invalid. In other words, the empty match is semantically
equivalent to the _a => ... match. In the interest of explicitness, we prefer the case with an
arm, hence we won't tell the user to remove the _a arm. In other words, the _a arm is
unreachable yet not redundant. This is why we lint on redundant arms rather than unreachable
arms, despite the fact that the lint says "unreachable".
These considerations only affects certain places, namely those that can contain non-valid data without UB. These are: pointer dereferences, reference dereferences, and union field accesses. We track during exhaustiveness checking whether a given place is known to contain valid data.
Having said all that, the current implementation of exhaustiveness checking does not follow the
above considerations. On stable, empty types are for the most part treated as non-empty. The
exhaustive_patterns feature errs on the other end: it allows omitting arms that could be
reachable in unsafe situations. The never_patterns experimental feature aims to fix this and
permit the correct behavior of empty types in patterns.
Unsafety Checking
Certain expressions in Rust can violate memory safety and as such need to be
inside an unsafe block or function. The compiler will also warn if an unsafe
block is used without any corresponding unsafe operations.
Overview
The unsafety check is located in the check_unsafety module. It performs a
walk over the THIR of a function and all of its closures and inline constants.
It keeps track of the unsafe context: whether it has entered an unsafe block.
If an unsafe operation is used outside of an unsafe block, then an error is
reported. If an unsafe operation is used in an unsafe block then that block is
marked as used for the unused_unsafe lint.
The unsafety check needs type information so could potentially be done on the HIR, making use of typeck results, THIR or MIR. THIR is chosen because there are fewer cases to consider than in HIR, for example unsafe function calls and unsafe method calls have the same representation in THIR. The check is not done on MIR because safety checks do not depend on control flow so MIR is not necessary to use and MIR doesn't have as precise spans for some expressions.
Most unsafe operations can be identified by checking the ExprKind in THIR and
checking the type of the argument. For example, dereferences of a raw pointer
correspond to ExprKind::Derefs with an argument that has a raw pointer type.
Looking for unsafe Union field accesses is a bit more complex because writing to a field of a union is safe. The checker tracks when it's visiting the left-hand side of an assignment expression and allows union fields to directly appear there, while erroring in all other cases. Union field accesses can also occur in patterns, so those have to be walked as well.
The other complicated safety check is for writes to fields of layout constrained
structs (such as NonNull). These are found by looking for the borrow or
assignment expression and then visiting the subexpression being borrowed or
assigned with a separate visitor.
The unused_unsafe lint
The unused_unsafe lint reports unsafe blocks that can be removed. The unsafety
checker records whenever it finds an operation that requires unsafe. The lint is
then reported if either:
- An
unsafeblock contains no unsafe operations - An
unsafeblock is within another unsafe block, and the outer block isn't considered unused
#![allow(unused)] #![deny(unused_unsafe)] fn main() { let y = 0; let x: *const u8 = core::ptr::addr_of!(y); unsafe { // lint reported for this block unsafe { let z = *x; } let safe_expr = 123; } unsafe { unsafe { // lint reported for this block let z = *x; } let unsafe_expr = *x; } }
Other checks involving unsafe
Unsafe traits require an unsafe impl to be implemented, the check for this
is done as part of coherence. The unsafe_code lint is run as a lint pass on
the ast that searches for unsafe blocks, functions and implementations, as well
as certain unsafe attributes.
Dataflow Analysis
If you work on the MIR, you will frequently come across various flavors of
dataflow analysis. rustc uses dataflow to find uninitialized
variables, determine what variables are live across a generator yield
statement, and compute which Places are borrowed at a given point in the
control-flow graph. Dataflow analysis is a fundamental concept in modern
compilers, and knowledge of the subject will be helpful to prospective
contributors.
However, this documentation is not a general introduction to dataflow analysis.
It is merely a description of the framework used to define these analyses in
rustc. It assumes that the reader is familiar with the core ideas as well as
some basic terminology, such as "transfer function", "fixpoint" and "lattice".
If you're unfamiliar with these terms, or if you want a quick refresher,
Static Program Analysis by Anders Møller and Michael I. Schwartzbach is an
excellent, freely available textbook. For those who prefer audiovisual
learning, we previously recommended a series of short lectures
by the Goethe University Frankfurt on YouTube, but it has since been deleted.
See this PR for the context and this comment
for the alternative lectures.
Defining a Dataflow Analysis
A dataflow analysis is defined by the Analysis trait. In addition to the
type of the dataflow state, this trait defines the initial value of that state
at entry to each block, as well as the direction of the analysis, either
forward or backward. The domain of your dataflow analysis must be a lattice
(strictly speaking a join-semilattice) with a well-behaved join operator. See
documentation for the lattice module, as well as the JoinSemiLattice
trait, for more information.
Transfer Functions and Effects
The dataflow framework in rustc allows each statement (and terminator) inside
a basic block to define its own transfer function. For brevity, these
individual transfer functions are known as "effects". Each effect is applied
successively in dataflow order, and together they define the transfer function
for the entire basic block. It's also possible to define an effect for
particular outgoing edges of some terminators (e.g.
apply_call_return_effect for the success edge of a Call
terminator). Collectively, these are referred to as "per-edge effects".
"Before" Effects
Observant readers of the documentation may notice that there are actually two possible effects for each statement and terminator, the "before" effect and the unprefixed (or "primary") effect. The "before" effects are applied immediately before the unprefixed effect regardless of the direction of the analysis. In other words, a backward analysis will apply the "before" effect and then the "primary" effect when computing the transfer function for a basic block, just like a forward analysis.
The vast majority of analyses should use only the unprefixed effects: Having multiple effects for each statement makes it difficult for consumers to know where they should be looking. However, the "before" variants can be useful in some scenarios, such as when the effect of the right-hand side of an assignment statement must be considered separately from the left-hand side.
Convergence
Your analysis must converge to "fixpoint", otherwise it will run forever. Converging to fixpoint is just another way of saying "reaching equilibrium". In order to reach equilibrium, your analysis must obey some laws. One of the laws it must obey is that the bottom value1 joined with some other value equals the second value. Or, as an equation:
bottom join x = x
Another law is that your analysis must have a "top value" such that
top join x = top
Having a top value ensures that your semilattice has a finite height, and the law state above ensures that once the dataflow state reaches top, it will no longer change (the fixpoint will be top).
The bottom value's primary purpose is as the initial dataflow state. Each basic block's entry state is initialized to bottom before the analysis starts.
A Brief Example
This section provides a brief example of a simple data-flow analysis at a high level. It doesn't explain everything you need to know, but hopefully it will make the rest of this page clearer.
Let's say we want to do a simple analysis to find if mem::transmute may have
been called by a certain point in the program. Our analysis domain will just
be a bool that records whether transmute has been called so far. The bottom
value will be false, since by default transmute has not been called. The top
value will be true, since our analysis is done as soon as we determine that
transmute has been called. Our join operator will just be the boolean OR (||)
operator. We use OR and not AND because of this case:
#![allow(unused)] fn main() { unsafe fn example(some_cond: bool) { let x = if some_cond { std::mem::transmute::<i32, u32>(0_i32) // transmute was called! } else { 1_u32 // transmute was not called }; // Has transmute been called by this point? We conservatively approximate that // as yes, and that is why we use the OR operator. println!("x: {}", x); } }
Inspecting the Results of a Dataflow Analysis
Once you have constructed an analysis, you must call iterate_to_fixpoint
which will return a Results, which contains the dataflow state at fixpoint
upon entry of each block. Once you have a Results, you can inspect the
dataflow state at fixpoint at any point in the CFG. If you only need the state
at a few locations (e.g., each Drop terminator) use a ResultsCursor. If
you need the state at every location, a ResultsVisitor will be more
efficient.
Analysis
|
| iterate_to_fixpoint()
|
Results
/ \
into_results_cursor(…) / \ visit_with(…)
/ \
ResultsCursor ResultsVisitor
For example, the following code uses a ResultsVisitor...
// Assuming `MyVisitor` implements `ResultsVisitor<FlowState = MyAnalysis::Domain>`...
let mut my_visitor = MyVisitor::new();
// inspect the fixpoint state for every location within every block in RPO.
let results = MyAnalysis::new()
.iterate_to_fixpoint(tcx, body, None);
results.visit_with(body, &mut my_visitor);`
whereas this code uses ResultsCursor:
let mut results = MyAnalysis::new()
.into_engine(tcx, body, def_id)
.iterate_to_fixpoint()
.into_results_cursor(body);
// Inspect the fixpoint state immediately before each `Drop` terminator.
for (bb, block) in body.basic_blocks().iter_enumerated() {
if let TerminatorKind::Drop { .. } = block.terminator().kind {
results.seek_before_primary_effect(body.terminator_loc(bb));
let state = results.get();
println!("state before drop: {:#?}", state);
}
}
Graphviz Diagrams
When the results of a dataflow analysis are not what you expect, it often helps
to visualize them. This can be done with the -Z dump-mir flags described in
Debugging MIR. Start with -Z dump-mir=F -Z dump-mir-dataflow, where F is
either "all" or the name of the MIR body you are interested in.
These .dot files will be saved in your mir_dump directory and will have the
NAME of the analysis (e.g. maybe_inits) as part of their filename. Each
visualization will display the full dataflow state at entry and exit of each
block, as well as any changes that occur in each statement and terminator. See
the example below:

Drop elaboration
- Dynamic drops
- Drop obligations
- Drop elaboration
- Drop elaboration in
rustc - Aside: drop elaboration and const-eval
Dynamic drops
According to the reference:
When an initialized variable or temporary goes out of scope, its destructor is run, or it is dropped. Assignment also runs the destructor of its left-hand operand, if it's initialized. If a variable has been partially initialized, only its initialized fields are dropped.
When building the MIR, the Drop and DropAndReplace terminators represent
places where drops may occur. However, in this phase, the presence of these
terminators does not guarantee that a destructor will run. That's because the
target of a drop may be uninitialized (usually because it has been moved from)
before the terminator is reached. In general, we cannot know at compile-time whether a
variable is initialized.
#![allow(unused)] fn main() { let mut y = vec![]; { let x = vec![1, 2, 3]; if std::process::id() % 2 == 0 { y = x; // conditionally move `x` into `y` } } // `x` goes out of scope here. Should it be dropped? }
In these cases, we need to keep track of whether a variable is initialized dynamically. The rules are laid out in detail in RFC 320: Non-zeroing dynamic drops.
Drop obligations
From the RFC:
When a local variable becomes initialized, it establishes a set of "drop obligations": a set of structural paths (e.g. a local
a, or a path to a fieldb.f.y) that need to be dropped.The drop obligations for a local variable x of struct-type
Tare computed from analyzing the structure ofT. IfTitself implementsDrop, thenxis a drop obligation. IfTdoes not implementDrop, then the set of drop obligations is the union of the drop obligations of the fields ofT.
When a structural path is moved from (and thus becomes uninitialized), any drop
obligations for that path or its descendants (path.f, path.f.g.h, etc.) are
released. Types with Drop implementations do not permit moves from individual
fields, so there is no need to track initializedness through them.
When a local variable goes out of scope (Drop), or when a structural path is
overwritten via assignment (DropAndReplace), we check for any drop
obligations for that variable or path. Unless that obligation has been
released by this point, its associated Drop implementation will be called.
For enum types, only fields corresponding to the "active" variant need to be
dropped. When processing drop obligations for such types, we first check the
discriminant to determine the active variant. All drop obligations for variants
besides the active one are ignored.
Here are a few interesting types to help illustrate these rules:
#![allow(unused)] fn main() { struct NoDrop(u8); // No `Drop` impl. No fields with `Drop` impls. struct NeedsDrop(Vec<u8>); // No `Drop` impl but has fields with `Drop` impls. struct ThinVec(*const u8); // Custom `Drop` impl. Individual fields cannot be moved from. impl Drop for ThinVec { fn drop(&mut self) { /* ... */ } } enum MaybeDrop { Yes(NeedsDrop), No(NoDrop), } }
Drop elaboration
One valid model for these rules is to keep a boolean flag (a "drop flag") for
every structural path that is used at any point in the function. This flag is
set when its path is initialized and is cleared when the path is moved from.
When a Drop occurs, we check the flags for every obligation associated with
the target of the Drop and call the associated Drop impl for those that are
still applicable.
This process—transforming the newly built MIR with its imprecise Drop and
DropAndReplace terminators into one with drop flags—is known as drop
elaboration. When a MIR statement causes a variable to become initialized (or
uninitialized), drop elaboration inserts code that sets (or clears) the drop
flag for that variable. It wraps Drop terminators in conditionals that check
the newly inserted drop flags.
Drop elaboration also splits DropAndReplace terminators into a Drop of the
target and a write of the newly dropped place. This is somewhat unrelated to what
we've discussed above.
Once this is complete, Drop terminators in the MIR correspond to a call to
the "drop glue" or "drop shim" for the type of the dropped place. The drop
glue for a type calls the Drop impl for that type (if one exists), and then
recursively calls the drop glue for all fields of that type.
Drop elaboration in rustc
The approach described above is more expensive than necessary. One can imagine a few optimizations:
- Only paths that are the target of a
Drop(or have the target as a prefix) need drop flags. - Some variables are known to be initialized (or uninitialized) when they are dropped. These do not need drop flags.
- If a set of paths are only dropped or moved from via a shared prefix, those paths can share a single drop flag.
A subset of these are implemented in rustc.
In the compiler, drop elaboration is split across several modules. The pass itself is defined here, but the main logic is defined elsewhere since it is also used to build drop shims.
Drop elaboration designates each Drop in the newly built MIR as one of four
kinds:
Static, the target is always initialized.Dead, the target is always uninitialized.Conditional, the target is either wholly initialized or wholly uninitialized. It is not partly initialized.Open, the target may be partly initialized.
For this, it uses a pair of dataflow analyses, MaybeInitializedPlaces and
MaybeUninitializedPlaces. If a place is in one but not the other, then the
initializedness of the target is known at compile-time (Dead or Static).
In this case, drop elaboration does not add a flag for the target. It simply
removes (Dead) or preserves (Static) the Drop terminator.
For Conditional drops, we know that the initializedness of the variable as a
whole is the same as the initializedness of its fields. Therefore, once we
generate a drop flag for the target of that drop, it's safe to call the drop
glue for that target.
Open drops
Open drops are the most complex, since we need to break down a single Drop
terminator into several different ones, one for each field of the target whose
type has drop glue (Ty::needs_drop). We cannot call the drop glue for the
target itself because that requires all fields of the target to be initialized.
Remember, variables whose type has a custom Drop impl do not allow Open
drops because their fields cannot be moved from.
This is accomplished by recursively categorizing each field as Dead,
Static, Conditional or Open. Fields whose type does not have drop glue
are automatically Dead and need not be considered during the recursion. When
we reach a field whose kind is not Open, we handle it as we did above. If the
field is also Open, the recursion continues.
It's worth noting how we handle Open drops of enums. Inside drop elaboration,
each variant of the enum is treated like a field, with the invariant that only
one of those "variant fields" can be initialized at any given time. In the
general case, we do not know which variant is the active one, so we will have
to call the drop glue for the enum (which checks the discriminant) or check the
discriminant ourselves as part of an elaborated Open drop. However, in
certain cases (within a match arm, for example) we do know which variant of
an enum is active. This information is encoded in the MaybeInitializedPlaces
and MaybeUninitializedPlaces dataflow analyses by marking all places
corresponding to inactive variants as uninitialized.
Cleanup paths
TODO: Discuss drop elaboration and unwinding.
Aside: drop elaboration and const-eval
In Rust, functions that are eligible for evaluation at compile-time must be
marked explicitly using the const keyword. This includes implementations of
the Drop trait, which may or may not be const. Code that is eligible for
compile-time evaluation may only call const functions, so any calls to
non-const Drop implementations in such code must be forbidden.
A call to a Drop impl is encoded as a Drop terminator in the MIR. However,
as we discussed above, a Drop terminator in newly built MIR does not
necessarily result in a call to Drop::drop. The drop target may be
uninitialized at that point. This means that checking for non-const Drops on
the newly built MIR can result in spurious errors. Instead, we wait until after
drop elaboration runs, which eliminates Dead drops (ones where the target is
known to be uninitialized) to run these checks.
MIR borrow check
The borrow check is Rust's "secret sauce" – it is tasked with enforcing a number of properties:
- That all variables are initialized before they are used.
- That you can't move the same value twice.
- That you can't move a value while it is borrowed.
- That you can't access a place while it is mutably borrowed (except through the reference).
- That you can't mutate a place while it is immutably borrowed.
- etc
The borrow checker operates on the MIR. An older implementation operated on the HIR. Doing borrow checking on MIR has several advantages:
- The MIR is far less complex than the HIR; the radical desugaring helps prevent bugs in the borrow checker. (If you're curious, you can see a list of bugs that the MIR-based borrow checker fixes here.)
- Even more importantly, using the MIR enables "non-lexical lifetimes", which are regions derived from the control-flow graph.
Major phases of the borrow checker
The borrow checker source is found in
the rustc_borrowck crate. The main entry point is
the mir_borrowck query.
- We first create a local copy of the MIR. In the coming steps, we will modify this copy in place to modify the types and things to include references to the new regions that we are computing.
- We then invoke
replace_regions_in_mirto modify our local MIR. Among other things, this function will replace all of the regions in the MIR with fresh inference variables. - Next, we perform a number of dataflow analyses that compute what data is moved and when.
- We then do a second type check across the MIR: the purpose of this type check is to determine all of the constraints between different regions.
- Next, we do region inference, which computes the values of each region — basically, the points in the control-flow graph where each lifetime must be valid according to the constraints we collected.
- At this point, we can compute the "borrows in scope" at each point.
- Finally, we do a second walk over the MIR, looking at the actions it
does and reporting errors. For example, if we see a statement like
*a + 1, then we would check that the variableais initialized and that it is not mutably borrowed, as either of those would require an error to be reported. Doing this check requires the results of all the previous analyses.
Tracking moves and initialization
Part of the borrow checker's job is to track which variables are "initialized" at any given point in time -- this also requires figuring out where moves occur and tracking those.
Initialization and moves
From a user's perspective, initialization -- giving a variable some value -- and moves -- transferring ownership to another place -- might seem like distinct topics. Indeed, our borrow checker error messages often talk about them differently. But within the borrow checker, they are not nearly as separate. Roughly speaking, the borrow checker tracks the set of "initialized places" at any point in the source code. Assigning to a previously uninitialized local variable adds it to that set; moving from a local variable removes it from that set.
Consider this example:
fn foo() {
let a: Vec<u32>;
// a is not initialized yet
a = vec![22];
// a is initialized here
std::mem::drop(a); // a is moved here
// a is no longer initialized here
let l = a.len(); //~ ERROR
}
Here you can see that a starts off as uninitialized; once it is
assigned, it becomes initialized. But when drop(a) is called, that
moves a into the call, and hence it becomes uninitialized again.
Subsections
To make it easier to peruse, this section is broken into a number of subsections:
- Move paths the move path concept that we use to track which local variables (or parts of local variables, in some cases) are initialized.
- TODO Rest not yet written =)
Move paths
In reality, it's not enough to track initialization at the granularity of local variables. Rust also allows us to do moves and initialization at the field granularity:
fn foo() {
let a: (Vec<u32>, Vec<u32>) = (vec![22], vec![44]);
// a.0 and a.1 are both initialized
let b = a.0; // moves a.0
// a.0 is not initialized, but a.1 still is
let c = a.0; // ERROR
let d = a.1; // OK
}
To handle this, we track initialization at the granularity of a move
path. A MovePath represents some location that the user can
initialize, move, etc. So e.g. there is a move-path representing the
local variable a, and there is a move-path representing a.0. Move
paths roughly correspond to the concept of a Place from MIR, but
they are indexed in ways that enable us to do move analysis more
efficiently.
Move path indices
Although there is a MovePath data structure, they are never referenced
directly. Instead, all the code passes around indices of type
MovePathIndex. If you need to get information about a move path, you use
this index with the move_paths field of the MoveData. For
example, to convert a MovePathIndex mpi into a MIR Place, you might
access the MovePath::place field like so:
move_data.move_paths[mpi].place
Building move paths
One of the first things we do in the MIR borrow check is to construct
the set of move paths. This is done as part of the
MoveData::gather_moves function. This function uses a MIR visitor
called MoveDataBuilder to walk the MIR and look at how each Place
within is accessed. For each such Place, it constructs a
corresponding MovePathIndex. It also records when/where that
particular move path is moved/initialized, but we'll get to that in a
later section.
Illegal move paths
We don't actually create a move-path for every Place that gets
used. In particular, if it is illegal to move from a Place, then
there is no need for a MovePathIndex. Some examples:
- You cannot move from a static variable, so we do not create a
MovePathIndexfor static variables. - You cannot move an individual element of an array, so if we have e.g.
foo: [String; 3], there would be no move-path forfoo[1]. - You cannot move from inside of a borrowed reference, so if we have e.g.
foo: &String, there would be no move-path for*foo.
These rules are enforced by the move_path_for function, which
converts a Place into a MovePathIndex -- in error cases like
those just discussed, the function returns an Err. This in turn
means we don't have to bother tracking whether those places are
initialized (which lowers overhead).
Looking up a move-path
If you have a Place and you would like to convert it to a MovePathIndex, you
can do that using the MovePathLookup structure found in the rev_lookup field
of MoveData. There are two different methods:
find_local, which takes amir::Localrepresenting a local variable. This is the easier method, because we always create aMovePathIndexfor every local variable.find, which takes an arbitraryPlace. This method is a bit more annoying to use, precisely because we don't have aMovePathIndexfor everyPlace(as we just discussed in the "illegal move paths" section). Therefore,findreturns aLookupResultindicating the closest path it was able to find that exists (e.g., forfoo[1], it might return just the path forfoo).
Cross-references
As we noted above, move-paths are stored in a big vector and
referenced via their MovePathIndex. However, within this vector,
they are also structured into a tree. So for example if you have the
MovePathIndex for a.b.c, you can go to its parent move-path
a.b. You can also iterate over all children paths: so, from a.b,
you might iterate to find the path a.b.c (here you are iterating
just over the paths that are actually referenced in the source,
not all possible paths that could have been referenced). These
references are used for example in the
find_in_move_path_or_its_descendants function, which determines
whether a move-path (e.g., a.b) or any child of that move-path
(e.g.,a.b.c) matches a given predicate.
The MIR type-check
A key component of the borrow check is the MIR type-check. This check walks the MIR and does a complete "type check" -- the same kind you might find in any other language. In the process of doing this type-check, we also uncover the region constraints that apply to the program.
TODO -- elaborate further? Maybe? :)
User types
At the start of MIR type-check, we replace all regions in the body with new unconstrained regions. However, this would cause us to accept the following program:
#![allow(unused)] fn main() { fn foo<'a>(x: &'a u32) { let y: &'static u32 = x; } }
By erasing the lifetimes in the type of y we no longer know that it is supposed to be 'static,
ignoring the intentions of the user.
To deal with this we remember all places where the user explicitly mentioned a type during
HIR type-check as CanonicalUserTypeAnnotations.
There are two different annotations we care about:
- explicit type ascriptions, e.g.
let y: &'static u32results inUserType::Ty(&'static u32). - explicit generic arguments, e.g.
x.foo<&'a u32, Vec<String>>results inUserType::TypeOf(foo_def_id, [&'a u32, Vec<String>]).
As we do not want the region inference from the HIR type-check to influence MIR typeck,
we store the user type right after lowering it from the HIR.
This means that it may still contain inference variables,
which is why we are using canonical user type annotations.
We replace all inference variables with existential bound variables instead.
Something like let x: Vec<_> would therefore result in exists<T> UserType::Ty(Vec<T>).
A pattern like let Foo(x): Foo<&'a u32> has a user type Foo<&'a u32> but
the actual type of x should only be &'a u32. For this, we use a UserTypeProjection.
In the MIR, we deal with user types in two slightly different ways.
Given a MIR local corresponding to a variable in a pattern which has an explicit type annotation,
we require the type of that local to be equal to the type of the UserTypeProjection.
This is directly stored in the LocalDecl.
We also constrain the type of scrutinee expressions, e.g. the type of x in let _: &'a u32 = x;.
Here T_x only has to be a subtype of the user type, so we instead use
StatementKind::AscribeUserType for that.
Note that we do not directly use the user type as the MIR typechecker
doesn't really deal with type and const inference variables. We instead store the final
inferred_type from the HIR type-checker. During MIR typeck, we then replace its regions
with new nll inference vars and relate it with the actual UserType to get the correct region
constraints again.
After the MIR type-check, all user type annotations get discarded, as they aren't needed anymore.
Drop Check
We generally require the type of locals to be well-formed whenever the local is used. This includes proving the where-bounds of the local and also requires all regions used by it to be live.
The only exception to this is when implicitly dropping values when they go out of scope. This does not necessarily require the value to be live:
fn main() { let x = vec![]; { let y = String::from("I am temporary"); x.push(&y); } // `x` goes out of scope here, after the reference to `y` // is invalidated. This means that while dropping `x` its type // is not well-formed as it contain regions which are not live. }
This is only sound if dropping the value does not try to access any dead
region. We check this by requiring the type of the value to be
drop-live.
The requirements for which are computed in fn dropck_outlives.
The rest of this section uses the following type definition for a type which requires its region parameter to be live:
#![allow(unused)] fn main() { struct PrintOnDrop<'a>(&'a str); impl<'a> Drop for PrintOnDrop<'_> { fn drop(&mut self) { println!("{}", self.0); } } }
How values are dropped
At its core, a value of type T is dropped by executing its "drop
glue". Drop glue is compiler generated and first calls <T as Drop>::drop and then recursively calls the drop glue of any recursively
owned values.
- If
Thas an explicitDropimpl, call<T as Drop>::drop. - Regardless of whether
TimplementsDrop, recurse into all values owned byT:- references, raw pointers, function pointers, function items, trait objects1, and scalars do not own anything.
- tuples, slices, and arrays consider their elements to be owned. For arrays of length zero we do not own any value of the element type.
- all fields (of all variants) of ADTs are considered owned. We
consider all variants for enums. The exception here is
ManuallyDrop<U>which is not considered to ownU.PhantomData<U>also does not own anything. closures and generators own their captured upvars.
Whether a type has drop glue is returned by fn Ty::needs_drop.
Partially dropping a local
For types which do not implement Drop themselves, we can also
partially move parts of the value before dropping the rest. In this case
only the drop glue for the not-yet moved values is called, e.g.
fn main() { let mut x = (PrintOnDrop("third"), PrintOnDrop("first")); drop(x.1); println!("second") }
During MIR building we assume that a local may get dropped whenever it
goes out of scope as long as its type needs drop. Computing the exact
drop glue for a variable happens after borrowck in the
ElaborateDrops pass. This means that even if some part of the local
have been dropped previously, dropck still requires this value to be
live. This is the case even if we completely moved a local.
fn main() { let mut x; { let temp = String::from("I am temporary"); x = PrintOnDrop(&temp); drop(x); } } //~ ERROR `temp` does not live long enough.
It should be possible to add some amount of drop elaboration before borrowck, allowing this example to compile. There is an unstable feature to move drop elaboration before const checking: #73255. Such a feature gate does not exist for doing some drop elaboration before borrowck, although there's a relevant MCP.
you can consider trait objects to have a builtin Drop
implementation which directly uses the drop_in_place provided by the
vtable. This Drop implementation requires all its generic parameters
to be live.
dropck_outlives
There are two distinct "liveness" computations that we perform:
- a value
vis use-live at locationLif it may be "used" later; a use here is basically anything that is not a drop - a value
vis drop-live at locationLif it maybe dropped later
When things are use-live, their entire type must be valid at L. When
they are drop-live, all regions that are required by dropck must be
valid at L. The values dropped in the MIR are places.
The constraints computed by dropck_outlives for a type closely match
the generated drop glue for that type. Unlike drop glue,
dropck_outlives cares about the types of owned values, not the values
itself. For a value of type T
- if
Thas an explicitDrop, require all generic arguments to be live, unless they are marked with#[may_dangle]in which case they are fully ignored - regardless of whether
Thas an explicitDrop, recurse into all types owned byT- references, raw pointers, function pointers, function items, trait objects1, and scalars do not own anything.
- tuples, slices and arrays consider their element type to be owned. For arrays we currently do not check whether their length is zero.
- all fields (of all variants) of ADTs are considered owned. The
exception here is
ManuallyDrop<U>which is not considered to ownU. We considerPhantomData<U>to ownU. - closures and generators own their captured upvars.
The sections marked in bold are cases where dropck_outlives considers
types to be owned which are ignored by Ty::needs_drop. We only rely on
dropck_outlives if Ty::needs_drop for the containing local returned
true.This means liveness requirements can change depending on whether
a type is contained in a larger local. This is inconsistent, and
should be fixed: an example for
arrays
and for
PhantomData.2
One possible way these inconsistencies can be fixed is by MIR building
to be more pessimistic, probably by making Ty::needs_drop weaker, or
alternatively, changing dropck_outlives to be more precise, requiring
fewer regions to be live.
Region inference (NLL)
The MIR-based region checking code is located in the rustc_mir::borrow_check
module.
The MIR-based region analysis consists of two major functions:
replace_regions_in_mir, invoked first, has two jobs:- First, it finds the set of regions that appear within the
signature of the function (e.g.,
'ainfn foo<'a>(&'a u32) { ... }). These are called the "universal" or "free" regions – in particular, they are the regions that appear free in the function body. - Second, it replaces all the regions from the function body with fresh inference variables. This is because (presently) those regions are the results of lexical region inference and hence are not of much interest. The intention is that – eventually – they will be "erased regions" (i.e., no information at all), since we won't be doing lexical region inference at all.
- First, it finds the set of regions that appear within the
signature of the function (e.g.,
compute_regions, invoked second: this is given as argument the results of move analysis. It has the job of computing values for all the inference variables thatreplace_regions_in_mirintroduced.- To do that, it first runs the MIR type checker. This is basically a normal type-checker but specialized to MIR, which is much simpler than full Rust, of course. Running the MIR type checker will however create various constraints between region variables, indicating their potential values and relationships to one another.
- After this, we perform constraint propagation by creating a
RegionInferenceContextand invoking itssolvemethod. - The NLL RFC also includes fairly thorough (and hopefully readable) coverage.
Universal regions
The UniversalRegions type represents a collection of universal regions
corresponding to some MIR DefId. It is constructed in
replace_regions_in_mir when we replace all regions with fresh inference
variables. UniversalRegions contains indices for all the free regions in
the given MIR along with any relationships that are known to hold between
them (e.g. implied bounds, where clauses, etc.).
For example, given the MIR for the following function:
#![allow(unused)] fn main() { fn foo<'a>(x: &'a u32) { // ... } }
we would create a universal region for 'a and one for 'static. There may
also be some complications for handling closures, but we will ignore those for
the moment.
TODO: write about how these regions are computed.
Region variables
The value of a region can be thought of as a set. This set contains all
points in the MIR where the region is valid along with any regions that are
outlived by this region (e.g. if 'a: 'b, then end('b) is in the set for
'a); we call the domain of this set a RegionElement. In the code, the value
for all regions is maintained in the rustc_borrowck::region_infer module.
For each region we maintain a set storing what elements are present in its value (to make this
efficient, we give each kind of element an index, the RegionElementIndex, and
use sparse bitsets).
The kinds of region elements are as follows:
- Each
locationin the MIR control-flow graph: a location is just the pair of a basic block and an index. This identifies the point on entry to the statement with that index (or the terminator, if the index is equal tostatements.len()). - There is an element
end('a)for each universal region'a, corresponding to some portion of the caller's (or caller's caller, etc) control-flow graph. - Similarly, there is an element denoted
end('static)corresponding to the remainder of program execution after this function returns. - There is an element
!1for each placeholder region!1. This corresponds (intuitively) to some unknown set of other elements – for details on placeholders, see the section placeholders and universes.
Constraints
Before we can infer the value of regions, we need to collect constraints on the regions. The full set of constraints is described in the section on constraint propagation, but the two most common sorts of constraints are:
- Outlives constraints. These are constraints that one region outlives another
(e.g.
'a: 'b). Outlives constraints are generated by the MIR type checker. - Liveness constraints. Each region needs to be live at points where it can be used.
Inference Overview
So how do we compute the contents of a region? This process is called region inference. The high-level idea is pretty simple, but there are some details we need to take care of.
Here is the high-level idea: we start off each region with the MIR locations we
know must be in it from the liveness constraints. From there, we use all of the
outlives constraints computed from the type checker to propagate the
constraints: for each region 'a, if 'a: 'b, then we add all elements of
'b to 'a, including end('b). This all happens in
propagate_constraints.
Then, we will check for errors. We first check that type tests are satisfied by
calling check_type_tests. This checks constraints like T: 'a. Second, we
check that universal regions are not "too big". This is done by calling
check_universal_regions. This checks that for each region 'a if 'a
contains the element end('b), then we must already know that 'a: 'b holds
(e.g. from a where clause). If we don't already know this, that is an error...
well, almost. There is some special handling for closures that we will discuss
later.
Example
Consider the following example:
fn foo<'a, 'b>(x: &'a usize) -> &'b usize {
x
}
Clearly, this should not compile because we don't know if 'a outlives 'b
(if it doesn't then the return value could be a dangling reference).
Let's back up a bit. We need to introduce some free inference variables (as is
done in replace_regions_in_mir). This example doesn't use the exact regions
produced, but it (hopefully) is enough to get the idea across.
fn foo<'a, 'b>(x: &'a /* '#1 */ usize) -> &'b /* '#3 */ usize {
x // '#2, location L1
}
Some notation: '#1, '#3, and '#2 represent the universal regions for the
argument, return value, and the expression x, respectively. Additionally, I
will call the location of the expression x L1.
So now we can use the liveness constraints to get the following starting points:
| Region | Contents |
|---|---|
| '#1 | |
| '#2 | L1 |
| '#3 | L1 |
Now we use the outlives constraints to expand each region. Specifically, we
know that '#2: '#3 ...
| Region | Contents |
|---|---|
| '#1 | L1 |
| '#2 | L1, end('#3) // add contents of '#3 and end('#3) |
| '#3 | L1 |
... and '#1: '#2, so ...
| Region | Contents |
|---|---|
| '#1 | L1, end('#2), end('#3) // add contents of '#2 and end('#2) |
| '#2 | L1, end('#3) |
| '#3 | L1 |
Now, we need to check that no regions were too big (we don't have any type
tests to check in this case). Notice that '#1 now contains end('#3), but
we have no where clause or implied bound to say that 'a: 'b... that's an
error!
Some details
The RegionInferenceContext type contains all of the information needed to
do inference, including the universal regions from replace_regions_in_mir and
the constraints computed for each region. It is constructed just after we
compute the liveness constraints.
Here are some of the fields of the struct:
constraints: contains all the outlives constraints.liveness_constraints: contains all the liveness constraints.universal_regions: contains theUniversalRegionsreturned byreplace_regions_in_mir.universal_region_relations: contains relations known to be true about universal regions. For example, if we have a where clause that'a: 'b, that relation is assumed to be true while borrow checking the implementation (it is checked at the caller), souniversal_region_relationswould contain'a: 'b.type_tests: contains some constraints on types that we must check after inference (e.g.T: 'a).closure_bounds_mapping: used for propagating region constraints from closures back out to the creator of the closure.
TODO: should we discuss any of the others fields? What about the SCCs?
Ok, now that we have constructed a RegionInferenceContext, we can do
inference. This is done by calling the solve method on the context. This
is where we call propagate_constraints and then check the resulting type
tests and universal regions, as discussed above.
Constraint propagation
The main work of the region inference is constraint propagation,
which is done in the propagate_constraints function. There are
three sorts of constraints that are used in NLL, and we'll explain how
propagate_constraints works by "layering" those sorts of constraints
on one at a time (each of them is fairly independent from the others):
- liveness constraints (
R live at E), which arise from liveness; - outlives constraints (
R1: R2), which arise from subtyping; - member constraints (
member R_m of [R_c...]), which arise from impl Trait.
In this chapter, we'll explain the "heart" of constraint propagation, covering both liveness and outlives constraints.
Notation and high-level concepts
Conceptually, region inference is a "fixed-point" computation. It is
given some set of constraints {C} and it computes a set of values
Values: R -> {E} that maps each region R to a set of elements
{E} (see here for more notes on region elements):
- Initially, each region is mapped to an empty set, so
Values(R) = {}for all regionsR. - Next, we process the constraints repeatedly until a fixed-point is reached:
- For each constraint C:
- Update
Valuesas needed to satisfy the constraint
- Update
- For each constraint C:
As a simple example, if we have a liveness constraint R live at E,
then we can apply Values(R) = Values(R) union {E} to make the
constraint be satisfied. Similarly, if we have an outlives constraints
R1: R2, we can apply Values(R1) = Values(R1) union Values(R2).
(Member constraints are more complex and we discuss them in this section.)
In practice, however, we are a bit more clever. Instead of applying the constraints in a loop, we can analyze the constraints and figure out the correct order to apply them, so that we only have to apply each constraint once in order to find the final result.
Similarly, in the implementation, the Values set is stored in the
scc_values field, but they are indexed not by a region but by a
strongly connected component (SCC). SCCs are an optimization that
avoids a lot of redundant storage and computation. They are explained
in the section on outlives constraints.
Liveness constraints
A liveness constraint arises when some variable whose type includes a region R is live at some point P. This simply means that the value of R must include the point P. Liveness constraints are computed by the MIR type checker.
A liveness constraint R live at E is satisfied if E is a member of
Values(R). So to "apply" such a constraint to Values, we just have
to compute Values(R) = Values(R) union {E}.
The liveness values are computed in the type-check and passed to the
region inference upon creation in the liveness_constraints argument.
These are not represented as individual constraints like R live at E
though; instead, we store a (sparse) bitset per region variable (of
type LivenessValues). This way we only need a single bit for each
liveness constraint.
One thing that is worth mentioning: All lifetime parameters are always considered to be live over the entire function body. This is because they correspond to some portion of the caller's execution, and that execution clearly includes the time spent in this function, since the caller is waiting for us to return.
Outlives constraints
An outlives constraint 'a: 'b indicates that the value of 'a must
be a superset of the value of 'b. That is, an outlives
constraint R1: R2 is satisfied if Values(R1) is a superset of
Values(R2). So to "apply" such a constraint to Values, we just
have to compute Values(R1) = Values(R1) union Values(R2).
One observation that follows from this is that if you have R1: R2
and R2: R1, then R1 = R2 must be true. Similarly, if you have:
R1: R2
R2: R3
R3: R4
R4: R1
then R1 = R2 = R3 = R4 follows. We take advantage of this to make things
much faster, as described shortly.
In the code, the set of outlives constraints is given to the region
inference context on creation in a parameter of type
OutlivesConstraintSet. The constraint set is basically just a list of 'a: 'b constraints.
The outlives constraint graph and SCCs
In order to work more efficiently with outlives constraints, they are
converted into the form of a graph, where the nodes of the
graph are region variables ('a, 'b) and each constraint 'a: 'b
induces an edge 'a -> 'b. This conversion happens in the
RegionInferenceContext::new function that creates the inference
context.
When using a graph representation, we can detect regions that must be equal by looking for cycles. That is, if you have a constraint like
'a: 'b
'b: 'c
'c: 'd
'd: 'a
then this will correspond to a cycle in the graph containing the
elements 'a...'d.
Therefore, one of the first things that we do in propagating region
values is to compute the strongly connected components (SCCs) in
the constraint graph. The result is stored in the constraint_sccs
field. You can then easily find the SCC that a region r is a part of
by invoking constraint_sccs.scc(r).
Working in terms of SCCs allows us to be more efficient: if we have a
set of regions 'a...'d that are part of a single SCC, we don't have
to compute/store their values separately. We can just store one value
for the SCC, since they must all be equal.
If you look over the region inference code, you will see that a number
of fields are defined in terms of SCCs. For example, the
scc_values field stores the values of each SCC. To get the value
of a specific region 'a then, we first figure out the SCC that the
region is a part of, and then find the value of that SCC.
When we compute SCCs, we not only figure out which regions are a member of each SCC, we also figure out the edges between them. So for example consider this set of outlives constraints:
'a: 'b
'b: 'a
'a: 'c
'c: 'd
'd: 'c
Here we have two SCCs: S0 contains 'a and 'b, and S1 contains 'c
and 'd. But these SCCs are not independent: because 'a: 'c, that
means that S0: S1 as well. That is -- the value of S0 must be a
superset of the value of S1. One crucial thing is that this graph of
SCCs is always a DAG -- that is, it never has cycles. This is because
all the cycles have been removed to form the SCCs themselves.
Applying liveness constraints to SCCs
The liveness constraints that come in from the type-checker are
expressed in terms of regions -- that is, we have a map like
Liveness: R -> {E}. But we want our final result to be expressed
in terms of SCCs -- we can integrate these liveness constraints very
easily just by taking the union:
for each region R:
let S be the SCC that contains R
Values(S) = Values(S) union Liveness(R)
In the region inferencer, this step is done in RegionInferenceContext::new.
Applying outlives constraints
Once we have computed the DAG of SCCs, we use that to structure out
entire computation. If we have an edge S1 -> S2 between two SCCs,
that means that Values(S1) >= Values(S2) must hold. So, to compute
the value of S1, we first compute the values of each successor S2.
Then we simply union all of those values together. To use a
quasi-iterator-like notation:
Values(S1) =
s1.successors()
.map(|s2| Values(s2))
.union()
In the code, this work starts in the propagate_constraints
function, which iterates over all the SCCs. For each SCC S1, we
compute its value by first computing the value of its
successors. Since SCCs form a DAG, we don't have to be concerned about
cycles, though we do need to keep a set around to track whether we
have already processed a given SCC or not. For each successor S2, once
we have computed S2's value, we can union those elements into the
value for S1. (Although we have to be careful in this process to
properly handle higher-ranked
placeholders. Note that the value
for S1 already contains the liveness constraints, since they were
added in RegionInferenceContext::new.
Once that process is done, we now have the "minimal value" for S1,
taking into account all of the liveness and outlives
constraints. However, in order to complete the process, we must also
consider member constraints, which are described in a later
section.
Universal regions
- Universal regions and their relationships to one another
- Everything is a region variable
- Universal lifetimes as the elements of a region's value
- The "value" of a universal region
- Liveness and universal regions
- Propagating outlives constraints for universal regions
- Detecting errors
"Universal regions" is the name that the code uses to refer to "named
lifetimes" -- e.g., lifetime parameters and 'static. The name
derives from the fact that such lifetimes are "universally quantified"
(i.e., we must make sure the code is true for all values of those
lifetimes). It is worth spending a bit of discussing how lifetime
parameters are handled during region inference. Consider this example:
fn foo<'a, 'b>(x: &'a u32, y: &'b u32) -> &'b u32 {
x
}
This example is intended not to compile, because we are returning x,
which has type &'a u32, but our signature promises that we will
return a &'b u32 value. But how are lifetimes like 'a and 'b
integrated into region inference, and how this error wind up being
detected?
Universal regions and their relationships to one another
Early on in region inference, one of the first things we do is to
construct a UniversalRegions struct. This struct tracks the
various universal regions in scope on a particular function. We also
create a UniversalRegionRelations struct, which tracks their
relationships to one another. So if you have e.g. where 'a: 'b, then
the UniversalRegionRelations struct would track that 'a: 'b is
known to hold (which could be tested with the outlives function.
Everything is a region variable
One important aspect of how NLL region inference works is that all
lifetimes are represented as numbered variables. This means that the
only variant of region_kind::RegionKind that we use is the ReVar
variant. These region variables are broken into two major categories,
based on their index:
- 0..N: universal regions -- the ones we are discussing here. In this case, the code must be correct with respect to any value of those variables that meets the declared relationships.
- N..M: existential regions -- inference variables where the region inferencer is tasked with finding some suitable value.
In fact, the universal regions can be further subdivided based on
where they were brought into scope (see the RegionClassification
type). These subdivisions are not important for the topics discussed
here, but become important when we consider closure constraint
propagation, so we discuss them there.
Universal lifetimes as the elements of a region's value
As noted previously, the value that we infer for each region is a set
{E}. The elements of this set can be points in the control-flow
graph, but they can also be an element end('a) corresponding to each
universal lifetime 'a. If the value for some region R0 includes
end('a), then this implies that R0 must extend until the end of 'a
in the caller.
The "value" of a universal region
During region inference, we compute a value for each universal region in the same way as we compute values for other regions. This value represents, effectively, the lower bound on that universal region -- the things that it must outlive. We now describe how we use this value to check for errors.
Liveness and universal regions
All universal regions have an initial liveness constraint that
includes the entire function body. This is because lifetime parameters
are defined in the caller and must include the entirety of the
function call that invokes this particular function. In addition, each
universal region 'a includes itself (that is, end('a)) in its
liveness constraint (i.e., 'a must extend until the end of
itself). In the code, these liveness constraints are setup in
init_free_and_bound_regions.
Propagating outlives constraints for universal regions
So, consider the first example of this section:
fn foo<'a, 'b>(x: &'a u32, y: &'b u32) -> &'b u32 {
x
}
Here, returning x requires that &'a u32 <: &'b u32, which gives
rise to an outlives constraint 'a: 'b. Combined with our default liveness
constraints we get:
'a live at {B, end('a)} // B represents the "function body"
'b live at {B, end('b)}
'a: 'b
When we process the 'a: 'b constraint, therefore, we will add
end('b) into the value for 'a, resulting in a final value of {B, end('a), end('b)}.
Detecting errors
Once we have finished constraint propagation, we then enforce a
constraint that if some universal region 'a includes an element
end('b), then 'a: 'b must be declared in the function's bounds. If
not, as in our example, that is an error. This check is done in the
check_universal_regions function, which simply iterates over all
universal regions, inspects their final value, and tests against the
declared UniversalRegionRelations.
Member constraints
A member constraint 'm member of ['c_1..'c_N] expresses that the
region 'm must be equal to some choice regions 'c_i (for
some i). These constraints cannot be expressed by users, but they
arise from impl Trait due to its lifetime capture rules. Consider a
function such as the following:
fn make(a: &'a u32, b: &'b u32) -> impl Trait<'a, 'b> { .. }
Here, the true return type (often called the "hidden type") is only
permitted to capture the lifetimes 'a or 'b. You can kind of see
this more clearly by desugaring that impl Trait return type into its
more explicit form:
type MakeReturn<'x, 'y> = impl Trait<'x, 'y>;
fn make(a: &'a u32, b: &'b u32) -> MakeReturn<'a, 'b> { .. }
Here, the idea is that the hidden type must be some type that could
have been written in place of the impl Trait<'x, 'y> -- but clearly
such a type can only reference the regions 'x or 'y (or
'static!), as those are the only names in scope. This limitation is
then translated into a restriction to only access 'a or 'b because
we are returning MakeReturn<'a, 'b>, where 'x and 'y have been
replaced with 'a and 'b respectively.
Detailed example
To help us explain member constraints in more detail, let's spell out
the make example in a bit more detail. First off, let's assume that
you have some dummy trait:
trait Trait<'a, 'b> { }
impl<T> Trait<'_, '_> for T { }
and this is the make function (in desugared form):
type MakeReturn<'x, 'y> = impl Trait<'x, 'y>;
fn make(a: &'a u32, b: &'b u32) -> MakeReturn<'a, 'b> {
(a, b)
}
What happens in this case is that the return type will be (&'0 u32, &'1 u32),
where '0 and '1 are fresh region variables. We will have the following
region constraints:
'0 live at {L}
'1 live at {L}
'a: '0
'b: '1
'0 member of ['a, 'b, 'static]
'1 member of ['a, 'b, 'static]
Here the "liveness set" {L} corresponds to that subset of the body
where '0 and '1 are live -- basically the point from where the
return tuple is constructed to where it is returned (in fact, '0 and
'1 might have slightly different liveness sets, but that's not very
interesting to the point we are illustrating here).
The 'a: '0 and 'b: '1 constraints arise from subtyping. When we
construct the (a, b) value, it will be assigned type (&'0 u32, &'1 u32) -- the region variables reflect that the lifetimes of these
references could be made smaller. For this value to be created from
a and b, however, we do require that:
(&'a u32, &'b u32) <: (&'0 u32, &'1 u32)
which means in turn that &'a u32 <: &'0 u32 and hence that 'a: '0
(and similarly that &'b u32 <: &'1 u32, 'b: '1).
Note that if we ignore member constraints, the value of '0 would be
inferred to some subset of the function body (from the liveness
constraints, which we did not write explicitly). It would never become
'a, because there is no need for it too -- we have a constraint that
'a: '0, but that just puts a "cap" on how large '0 can grow to
become. Since we compute the minimal value that we can, we are happy
to leave '0 as being just equal to the liveness set. This is where
member constraints come in.
Choices are always lifetime parameters
At present, the "choice" regions from a member constraint are always lifetime
parameters from the current function. As of October 2021,
this falls out from the placement of impl Trait, though in the future it may not
be the case. We take some advantage of this fact, as it simplifies the current
code. In particular, we don't have to consider a case like '0 member of ['1, 'static], in which the value of both '0 and '1 are being inferred and hence
changing. See rust-lang/rust#61773 for more information.
Applying member constraints
Member constraints are a bit more complex than other forms of
constraints. This is because they have a "or" quality to them -- that
is, they describe multiple choices that we must select from. E.g., in
our example constraint '0 member of ['a, 'b, 'static], it might be
that '0 is equal to 'a, 'b, or 'static. How can we pick the
correct one? What we currently do is to look for a minimal choice
-- if we find one, then we will grow '0 to be equal to that minimal
choice. To find that minimal choice, we take two factors into
consideration: lower and upper bounds.
Lower bounds
The lower bounds are those lifetimes that '0 must outlive --
i.e., that '0 must be larger than. In fact, when it comes time to
apply member constraints, we've already computed the lower bounds of
'0 because we computed its minimal value (or at least, the lower
bounds considering everything but member constraints).
Let LB be the current value of '0. We know then that '0: LB must
hold, whatever the final value of '0 is. Therefore, we can rule out
any choice 'choice where 'choice: LB does not hold.
Unfortunately, in our example, this is not very helpful. The lower
bound for '0 will just be the liveness set {L}, and we know that
all the lifetime parameters outlive that set. So we are left with the
same set of choices here. (But in other examples, particularly those
with different variance, lower bound constraints may be relevant.)
Upper bounds
The upper bounds are those lifetimes that must outlive '0 --
i.e., that '0 must be smaller than. In our example, this would be
'a, because we have the constraint that 'a: '0. In more complex
examples, the chain may be more indirect.
We can use upper bounds to rule out members in a very similar way to
lower bounds. If UB is some upper bound, then we know that UB: '0 must hold, so we can rule out any choice 'choice where UB: 'choice does not hold.
In our example, we would be able to reduce our choice set from ['a, 'b, 'static] to just ['a]. This is because '0 has an upper bound
of 'a, and neither 'a: 'b nor 'a: 'static is known to hold.
(For notes on how we collect upper bounds in the implementation, see the section below.)
Minimal choice
After applying lower and upper bounds, we can still sometimes have
multiple possibilities. For example, imagine a variant of our example
using types with the opposite variance. In that case, we would have
the constraint '0: 'a instead of 'a: '0. Hence the current value
of '0 would be {L, 'a}. Using this as a lower bound, we would be
able to narrow down the member choices to ['a, 'static] because 'b: 'a is not known to hold (but 'a: 'a and 'static: 'a do hold). We
would not have any upper bounds, so that would be our final set of choices.
In that case, we apply the minimal choice rule -- basically, if
one of our choices if smaller than the others, we can use that. In
this case, we would opt for 'a (and not 'static).
This choice is consistent with the general 'flow' of region propagation, which always aims to compute a minimal value for the region being inferred. However, it is somewhat arbitrary.
Collecting upper bounds in the implementation
In practice, computing upper bounds is a bit inconvenient, because our
data structures are setup for the opposite. What we do is to compute
the reverse SCC graph (we do this lazily and cache the result) --
that is, a graph where 'a: 'b induces an edge SCC('b) -> SCC('a). Like the normal SCC graph, this is a DAG. We can then do a
depth-first search starting from SCC('0) in this graph. This will
take us to all the SCCs that must outlive '0.
One wrinkle is that, as we walk the "upper bound" SCCs, their values
will not yet have been fully computed. However, we have already
applied their liveness constraints, so we have some information about
their value. In particular, for any regions representing lifetime
parameters, their value will contain themselves (i.e., the initial
value for 'a includes 'a and the value for 'b contains 'b). So
we can collect all of the lifetime parameters that are reachable,
which is precisely what we are interested in.
Placeholders and universes
- Subtyping and Placeholders
- What is a universe?
- Universes and placeholder region elements
- Placeholders and outlives constraints
- Extending the "universal regions" check
- Back to our example
- Another example
- Final example
From time to time we have to reason about regions that we can't concretely know. For example, consider this program:
// A function that needs a static reference
fn foo(x: &'static u32) { }
fn bar(f: for<'a> fn(&'a u32)) {
// ^^^^^^^^^^^^^^^^^^^ a function that can accept **any** reference
let x = 22;
f(&x);
}
fn main() {
bar(foo);
}
This program ought not to type-check: foo needs a static reference
for its argument, and bar wants to be given a function that
accepts any reference (so it can call it with something on its
stack, for example). But how do we reject it and why?
Subtyping and Placeholders
When we type-check main, and in particular the call bar(foo), we
are going to wind up with a subtyping relationship like this one:
fn(&'static u32) <: for<'a> fn(&'a u32)
---------------- -------------------
the type of `foo` the type `bar` expects
We handle this sort of subtyping by taking the variables that are
bound in the supertype and replacing them with
universally quantified
representatives, denoted like !1 here. We call these regions "placeholder
regions" – they represent, basically, "some unknown region".
Once we've done that replacement, we have the following relation:
fn(&'static u32) <: fn(&'!1 u32)
The key idea here is that this unknown region '!1 is not related to
any other regions. So if we can prove that the subtyping relationship
is true for '!1, then it ought to be true for any region, which is
what we wanted.
So let's work through what happens next. To check if two functions are subtypes, we check if their arguments have the desired relationship (fn arguments are contravariant, so we swap the left and right here):
&'!1 u32 <: &'static u32
According to the basic subtyping rules for a reference, this will be
true if '!1: 'static. That is – if "some unknown region !1" outlives 'static.
Now, this might be true – after all, '!1 could be 'static –
but we don't know that it's true. So this should yield up an error (eventually).
What is a universe?
In the previous section, we introduced the idea of a placeholder
region, and we denoted it !1. We call this number 1 the universe
index. The idea of a "universe" is that it is a set of names that
are in scope within some type or at some point. Universes are formed
into a tree, where each child extends its parents with some new names.
So the root universe conceptually contains global names, such as
the lifetime 'static or the type i32. In the compiler, we also
put generic type parameters into this root universe (in this sense,
there is not just one root universe, but one per item). So consider
this function bar:
struct Foo { }
fn bar<'a, T>(t: &'a T) {
...
}
Here, the root universe would consist of the lifetimes 'static and
'a. In fact, although we're focused on lifetimes here, we can apply
the same concept to types, in which case the types Foo and T would
be in the root universe (along with other global types, like i32).
Basically, the root universe contains all the names that
appear free in the body of bar.
Now let's extend bar a bit by adding a variable x:
fn bar<'a, T>(t: &'a T) {
let x: for<'b> fn(&'b u32) = ...;
}
Here, the name 'b is not part of the root universe. Instead, when we
"enter" into this for<'b> (e.g., by replacing it with a placeholder), we will create
a child universe of the root, let's call it U1:
U0 (root universe)
│
└─ U1 (child universe)
The idea is that this child universe U1 extends the root universe U0
with a new name, which we are identifying by its universe number:
!1.
Now let's extend bar a bit by adding one more variable, y:
fn bar<'a, T>(t: &'a T) {
let x: for<'b> fn(&'b u32) = ...;
let y: for<'c> fn(&'c u32) = ...;
}
When we enter this type, we will again create a new universe, which
we'll call U2. Its parent will be the root universe, and U1 will be
its sibling:
U0 (root universe)
│
├─ U1 (child universe)
│
└─ U2 (child universe)
This implies that, while in U2, we can name things from U0 or U2, but not U1.
Giving existential variables a universe. Now that we have this
notion of universes, we can use it to extend our type-checker and
things to prevent illegal names from leaking out. The idea is that we
give each inference (existential) variable – whether it be a type or
a lifetime – a universe. That variable's value can then only
reference names visible from that universe. So for example if a
lifetime variable is created in U0, then it cannot be assigned a value
of !1 or !2, because those names are not visible from the universe
U0.
Representing universes with just a counter. You might be surprised to see that the compiler doesn't keep track of a full tree of universes. Instead, it just keeps a counter – and, to determine if one universe can see another one, it just checks if the index is greater. For example, U2 can see U0 because 2 >= 0. But U0 cannot see U2, because 0 >= 2 is false.
How can we get away with this? Doesn't this mean that we would allow U2 to also see U1? The answer is that, yes, we would, if that question ever arose. But because of the structure of our type checker etc, there is no way for that to happen. In order for something happening in the universe U1 to "communicate" with something happening in U2, they would have to have a shared inference variable X in common. And because everything in U1 is scoped to just U1 and its children, that inference variable X would have to be in U0. And since X is in U0, it cannot name anything from U1 (or U2). This is perhaps easiest to see by using a kind of generic "logic" example:
exists<X> {
forall<Y> { ... /* Y is in U1 ... */ }
forall<Z> { ... /* Z is in U2 ... */ }
}
Here, the only way for the two foralls to interact would be through X, but neither Y nor Z are in scope when X is declared, so its value cannot reference either of them.
Universes and placeholder region elements
But where does that error come from? The way it happens is like this.
When we are constructing the region inference context, we can tell
from the type inference context how many placeholder variables exist
(the InferCtxt has an internal counter). For each of those, we
create a corresponding universal region variable !n and a "region
element" placeholder(n). This corresponds to "some unknown set of other
elements". The value of !n is {placeholder(n)}.
At the same time, we also give each existential variable a
universe (also taken from the InferCtxt). This universe
determines which placeholder elements may appear in its value: For
example, a variable in universe U3 may name placeholder(1), placeholder(2), and
placeholder(3), but not placeholder(4). Note that the universe of an inference
variable controls what region elements can appear in its value; it
does not say region elements will appear.
Placeholders and outlives constraints
In the region inference engine, outlives constraints have the form:
V1: V2 @ P
where V1 and V2 are region indices, and hence map to some region
variable (which may be universally or existentially quantified). The
P here is a "point" in the control-flow graph; it's not important
for this section. This variable will have a universe, so let's call
those universes U(V1) and U(V2) respectively. (Actually, the only
one we are going to care about is U(V1).)
When we encounter this constraint, the ordinary procedure is to start
a DFS from P. We keep walking so long as the nodes we are walking
are present in value(V2) and we add those nodes to value(V1). If
we reach a return point, we add in any end(X) elements. That part
remains unchanged.
But then after that we want to iterate over the placeholder placeholder(x)
elements in V2 (each of those must be visible to U(V2), but we
should be able to just assume that is true, we don't have to check
it). We have to ensure that value(V1) outlives each of those
placeholder elements.
Now there are two ways that could happen. First, if U(V1) can see
the universe x (i.e., x <= U(V1)), then we can just add placeholder(x)
to value(V1) and be done. But if not, then we have to approximate:
we may not know what set of elements placeholder(x) represents, but we
should be able to compute some sort of upper bound B for it –
some region B that outlives placeholder(x). For now, we'll just use
'static for that (since it outlives everything) – in the future, we
can sometimes be smarter here (and in fact we have code for doing this
already in other contexts). Moreover, since 'static is in the root
universe U0, we know that all variables can see it – so basically if
we find that value(V2) contains placeholder(x) for some universe x
that V1 can't see, then we force V1 to 'static.
Extending the "universal regions" check
After all constraints have been propagated, the NLL region inference
has one final check, where it goes over the values that wound up being
computed for each universal region and checks that they did not get
'too large'. In our case, we will go through each placeholder region
and check that it contains only the placeholder(u) element it is known to
outlive. (Later, we might be able to know that there are relationships
between two placeholder regions and take those into account, as we do
for universal regions from the fn signature.)
Put another way, the "universal regions" check can be considered to be checking constraints like:
{placeholder(1)}: V1
where {placeholder(1)} is like a constant set, and V1 is the variable we
made to represent the !1 region.
Back to our example
OK, so far so good. Now let's walk through what would happen with our first example:
fn(&'static u32) <: fn(&'!1 u32) @ P // this point P is not imp't here
The region inference engine will create a region element domain like this:
{ CFG; end('static); placeholder(1) }
--- ------------ ------- from the universe `!1`
| 'static is always in scope
all points in the CFG; not especially relevant here
It will always create two universal variables, one representing
'static and one representing '!1. Let's call them Vs and V1. They
will have initial values like so:
Vs = { CFG; end('static) } // it is in U0, so can't name anything else
V1 = { placeholder(1) }
From the subtyping constraint above, we would have an outlives constraint like
'!1: 'static @ P
To process this, we would grow the value of V1 to include all of Vs:
Vs = { CFG; end('static) }
V1 = { CFG; end('static), placeholder(1) }
At that point, constraint propagation is complete, because all the outlives relationships are satisfied. Then we would go to the "check universal regions" portion of the code, which would test that no universal region grew too large.
In this case, V1 did grow too large – it is not known to outlive
end('static), nor any of the CFG – so we would report an error.
Another example
What about this subtyping relationship?
for<'a> fn(&'a u32, &'a u32)
<:
for<'b, 'c> fn(&'b u32, &'c u32)
Here we would replace the bound region in the supertype with a placeholder, as before, yielding:
for<'a> fn(&'a u32, &'a u32)
<:
fn(&'!1 u32, &'!2 u32)
then we instantiate the variable on the left-hand side with an
existential in universe U2, yielding the following (?n is a notation
for an existential variable):
fn(&'?3 u32, &'?3 u32)
<:
fn(&'!1 u32, &'!2 u32)
Then we break this down further:
&'!1 u32 <: &'?3 u32
&'!2 u32 <: &'?3 u32
and even further, yield up our region constraints:
'!1: '?3
'!2: '?3
Note that, in this case, both '!1 and '!2 have to outlive the
variable '?3, but the variable '?3 is not forced to outlive
anything else. Therefore, it simply starts and ends as the empty set
of elements, and hence the type-check succeeds here.
(This should surprise you a little. It surprised me when I first realized it.
We are saying that if we are a fn that needs both of its arguments to have
the same region, we can accept being called with arguments with two
distinct regions. That seems intuitively unsound. But in fact, it's fine, as
I tried to explain in this issue on the Rust issue
tracker long ago. The reason is that even if we get called with arguments of
two distinct lifetimes, those two lifetimes have some intersection (the call
itself), and that intersection can be our value of 'a that we use as the
common lifetime of our arguments. -nmatsakis)
Final example
Let's look at one last example. We'll extend the previous one to have a return type:
for<'a> fn(&'a u32, &'a u32) -> &'a u32
<:
for<'b, 'c> fn(&'b u32, &'c u32) -> &'b u32
Despite seeming very similar to the previous example, this case is going to get an error. That's good: the problem is that we've gone from a fn that promises to return one of its two arguments, to a fn that is promising to return the first one. That is unsound. Let's see how it plays out.
First, we replace the bound region in the supertype with a placeholder:
for<'a> fn(&'a u32, &'a u32) -> &'a u32
<:
fn(&'!1 u32, &'!2 u32) -> &'!1 u32
Then we instantiate the subtype with existentials (in U2):
fn(&'?3 u32, &'?3 u32) -> &'?3 u32
<:
fn(&'!1 u32, &'!2 u32) -> &'!1 u32
And now we create the subtyping relationships:
&'!1 u32 <: &'?3 u32 // arg 1
&'!2 u32 <: &'?3 u32 // arg 2
&'?3 u32 <: &'!1 u32 // return type
And finally the outlives relationships. Here, let V1, V2, and V3 be the
variables we assign to !1, !2, and ?3 respectively:
V1: V3
V2: V3
V3: V1
Those variables will have these initial values:
V1 in U1 = {placeholder(1)}
V2 in U2 = {placeholder(2)}
V3 in U2 = {}
Now because of the V3: V1 constraint, we have to add placeholder(1) into V3 (and
indeed it is visible from V3), so we get:
V3 in U2 = {placeholder(1)}
then we have this constraint V2: V3, so we wind up having to enlarge
V2 to include placeholder(1) (which it can also see):
V2 in U2 = {placeholder(1), placeholder(2)}
Now constraint propagation is done, but when we check the outlives
relationships, we find that V2 includes this new element placeholder(1),
so we report an error.
Propagating closure constraints
When we are checking the type tests and universal regions, we may come across a constraint that we can't prove yet if we are in a closure body! However, the necessary constraints may actually hold (we just don't know it yet). Thus, if we are inside a closure, we just collect all the constraints we can't prove yet and return them. Later, when we are borrow check the MIR node that created the closure, we can also check that these constraints hold. At that time, if we can't prove they hold, we report an error.
Reporting region errors
TODO: we should discuss how to generate errors from the results of these analyses.
Two-phase borrows
Two-phase borrows are a more permissive version of mutable borrows that allow
nested method calls such as vec.push(vec.len()). Such borrows first act as
shared borrows in a "reservation" phase and can later be "activated" into a
full mutable borrow.
Only certain implicit mutable borrows can be two-phase, any &mut or ref mut
in the source code is never a two-phase borrow. The cases where we generate a
two-phase borrow are:
- The autoref borrow when calling a method with a mutable reference receiver.
- A mutable reborrow in function arguments.
- The implicit mutable borrow in an overloaded compound assignment operator.
To give some examples:
#![allow(unused)] fn main() { // In the source code // Case 1: let mut v = Vec::new(); v.push(v.len()); let r = &mut Vec::new(); r.push(r.len()); // Case 2: std::mem::replace(r, vec![1, r.len()]); // Case 3: let mut x = std::num::Wrapping(2); x += x; }
Expanding these enough to show the two-phase borrows:
// Case 1:
let mut v = Vec::new();
let temp1 = &two_phase v;
let temp2 = v.len();
Vec::push(temp1, temp2);
let r = &mut Vec::new();
let temp3 = &two_phase *r;
let temp4 = r.len();
Vec::push(temp3, temp4);
// Case 2:
let temp5 = &two_phase *r;
let temp6 = vec![1, r.len()];
std::mem::replace(temp5, temp6);
// Case 3:
let mut x = std::num::Wrapping(2);
let temp7 = &two_phase x;
let temp8 = x;
std::ops::AddAssign::add_assign(temp7, temp8);
Whether a borrow can be two-phase is tracked by a flag on the AutoBorrow
after type checking, which is then converted to a BorrowKind during MIR
construction.
Each two-phase borrow is assigned to a temporary that is only used once. As such we can define:
- The point where the temporary is assigned to is called the reservation point of the two-phase borrow.
- The point where the temporary is used, which is effectively always a function call, is called the activation point.
The activation points are found using the GatherBorrows visitor. The
BorrowData then holds both the reservation and activation points for the
borrow.
Checking two-phase borrows
Two-phase borrows are treated as if they were mutable borrows with the following exceptions:
- At every location in the MIR we check if any two-phase borrows are activated at this location. If a live two phase borrow is activated at a location, then we check that there are no borrows that conflict with the two-phase borrow.
- At the reservation point we error if there are conflicting live mutable borrows. And lint if there are any conflicting shared borrows.
- Between the reservation and the activation point, the two-phase borrow acts
as a shared borrow. We determine (in
is_active) if we're at such a point by using theDominatorsfor the MIR graph. - After the activation point, the two-phase borrow acts as a mutable borrow.
Errors and Lints
- Diagnostic structure
- Diagnostic output style guide
- Helpful tips and options
Span- Error messages
- Suggestions
- Lints
- JSON diagnostic output
#[rustc_on_unimplemented(...)]
A lot of effort has been put into making rustc have great error messages.
This chapter is about how to emit compile errors and lints from the compiler.
Diagnostic structure
The main parts of a diagnostic error are the following:
error[E0000]: main error message
--> file.rs:LL:CC
|
LL | <code>
| -^^^^- secondary label
| |
| primary label
|
= note: note without a `Span`, created with `.note`
note: sub-diagnostic message for `.span_note`
--> file.rs:LL:CC
|
LL | more code
| ^^^^
- Level (
error,warning, etc.). It indicates the severity of the message. (See diagnostic levels) - Code (for example, for "mismatched types", it is
E0308). It helps users get more information about the current error through an extended description of the problem in the error code index. Not all diagnostic have a code. For example, diagnostics created by lints don't have one. - Message. It is the main description of the problem. It should be general and able to stand on its own, so that it can make sense even in isolation.
- Diagnostic window. This contains several things:
- The path, line number and column of the beginning of the primary span.
- The users' affected code and its surroundings.
- Primary and secondary spans underlying the users' code. These spans can
optionally contain one or more labels.
- Primary spans should have enough text to describe the problem in such a way that if it were the only thing being displayed (for example, in an IDE) it would still make sense. Because it is "spatially aware" (it points at the code), it can generally be more succinct than the error message.
- If cluttered output can be foreseen in cases when multiple span labels
overlap, it is a good idea to tweak the output appropriately. For
example, the
if/else arms have incompatible typeserror uses different spans depending on whether the arms are all in the same line, if one of the arms is empty and if none of those cases applies.
- Sub-diagnostics. Any error can have multiple sub-diagnostics that look similar to the main part of the error. These are used for cases where the order of the explanation might not correspond with the order of the code. If the order of the explanation can be "order free", leveraging secondary labels in the main diagnostic is preferred, as it is typically less verbose.
The text should be matter of fact and avoid capitalization and periods, unless multiple sentences are needed:
error: the fobrulator needs to be krontrificated
When code or an identifier must appear in a message or label, it should be surrounded with backticks:
error: the identifier `foo.bar` is invalid
Error codes and explanations
Most errors have an associated error code. Error codes are linked to long-form
explanations which contains an example of how to trigger the error and in-depth
details about the error. They may be viewed with the --explain flag, or via
the error index.
As a general rule, give an error a code (with an associated explanation) if the explanation would give more information than the error itself. A lot of the time it's better to put all the information in the emitted error itself. However, sometimes that would make the error verbose or there are too many possible triggers to include useful information for all cases in the error, in which case it's a good idea to add an explanation.1 As always, if you are not sure, just ask your reviewer!
If you decide to add a new error with an associated error code, please read this section for a guide and important details about the process.
This rule of thumb was suggested by @estebank here.
Lints versus fixed diagnostics
Some messages are emitted via lints, where the user can control the level. Most diagnostics are hard-coded such that the user cannot control the level.
Usually it is obvious whether a diagnostic should be "fixed" or a lint, but there are some grey areas.
Here are a few examples:
- Borrow checker errors: these are fixed errors. The user cannot adjust the level of these diagnostics to silence the borrow checker.
- Dead code: this is a lint. While the user probably doesn't want dead code in their crate, making this a hard error would make refactoring and development very painful.
- future-incompatible lints: these are silencable lints. It was decided that making them fixed errors would cause too much breakage, so warnings are instead emitted, and will eventually be turned into fixed (hard) errors.
Hard-coded warnings (those using methods like span_warn) should be avoided
for normal code, preferring to use lints instead. Some cases, such as warnings
with CLI flags, will require the use of hard-coded warnings.
See the deny lint level below for guidelines when to
use an error-level lint instead of a fixed error.
Diagnostic output style guide
- Write in plain simple English. If your message, when shown on a – possibly small – screen (which hasn't been cleaned for a while), cannot be understood by a normal programmer, who just came out of bed after a night partying, it's too complex.
Error,Warning,Note, andHelpmessages start with a lowercase letter and do not end with punctuation.- Error messages should be succinct. Users will see these error messages many
times, and more verbose descriptions can be viewed with the
--explainflag. That said, don't make it so terse that it's hard to understand. - The word "illegal" is illegal. Prefer "invalid" or a more specific word instead.
- Errors should document the span of code where they occur (use
rustc_errors::DiagCtxt'sspan_*methods or a diagnostic struct's#[primary_span]to easily do this). Alsonoteother spans that have contributed to the error if the span isn't too large. - When emitting a message with span, try to reduce the span to the smallest amount possible that still signifies the issue
- Try not to emit multiple error messages for the same error. This may require detecting duplicates.
- When the compiler has too little information for a specific error message,
consult with the compiler team to add new attributes for library code that
allow adding more information. For example see
#[rustc_on_unimplemented]. Use these annotations when available! - Keep in mind that Rust's learning curve is rather steep, and that the compiler messages are an important learning tool.
- When talking about the compiler, call it
the compiler, notRustorrustc. - Use the Oxford comma when writing lists of items.
Lint naming
From RFC 0344, lint names should be consistent, with the following guidelines:
The basic rule is: the lint name should make sense when read as "allow
lint-name" or "allow lint-name items". For example, "allow
deprecated items" and "allow dead_code" makes sense, while "allow
unsafe_block" is ungrammatical (should be plural).
-
Lint names should state the bad thing being checked for, e.g.
deprecated, so that#[allow(deprecated)](items) reads correctly. Thusctypesis not an appropriate name;improper_ctypesis. -
Lints that apply to arbitrary items (like the stability lints) should just mention what they check for: use
deprecatedrather thandeprecated_items. This keeps lint names short. (Again, think "allow lint-name items".) -
If a lint applies to a specific grammatical class, mention that class and use the plural form: use
unused_variablesrather thanunused_variable. This makes#[allow(unused_variables)]read correctly. -
Lints that catch unnecessary, unused, or useless aspects of code should use the term
unused, e.g.unused_imports,unused_typecasts. -
Use snake case in the same way you would for function names.
Diagnostic levels
Guidelines for different diagnostic levels:
-
error: emitted when the compiler detects a problem that makes it unable to compile the program, either because the program is invalid or the programmer has decided to make a specificwarninginto an error. -
warning: emitted when the compiler detects something odd about a program. Care should be taken when adding warnings to avoid warning fatigue, and avoid false-positives where there really isn't a problem with the code. Some examples of when it is appropriate to issue a warning:- A situation where the user should take action, such as swap out a
deprecated item, or use a
Result, but otherwise doesn't prevent compilation. - Unnecessary syntax that can be removed without affecting the semantics of
the code. For example, unused code, or unnecessary
unsafe. - Code that is very likely to be incorrect, dangerous, or confusing, but the
language technically allows, and is not ready or confident enough to make
an error. For example
unused_comparisons(out of bounds comparisons) orbindings_with_variant_name(the user likely did not intend to create a binding in a pattern). - Future-incompatible lints, where something was accidentally or erroneously accepted in the past, but rejecting would cause excessive breakage in the ecosystem.
- Stylistic choices. For example, camel or snake case, or the
dyntrait warning in the 2018 edition. These have a high bar to be added, and should only be used in exceptional circumstances. Other stylistic choices should either be allow-by-default lints, or part of other tools like Clippy or rustfmt.
- A situation where the user should take action, such as swap out a
deprecated item, or use a
-
help: emitted following anerrororwarningto give additional information to the user about how to solve their problem. These messages often include a suggestion string andrustc_errors::Applicabilityconfidence level to guide automated source fixes by tools. See the Suggestions section for more details.The error or warning portion should not suggest how to fix the problem, only the "help" sub-diagnostic should.
-
note: emitted to given more context and identify additional circumstances and parts of the code that caused the warning or error. For example, the borrow checker will note any previous conflicting borrows.helpvsnote:helpshould be used to show changes the user can possibly make to fix the problem.noteshould be used for everything else, such as other context, information and facts, online resources to read, etc.
Not to be confused with lint levels, whose guidelines are:
-
forbid: Lints should never default toforbid. -
deny: Equivalent toerrordiagnostic level. Some examples:- A future-incompatible or edition-based lint that has graduated from the warning level.
- Something that has an extremely high confidence that is incorrect, but still want an escape hatch to allow it to pass.
-
warn: Equivalent to thewarningdiagnostic level. Seewarningabove for guidelines. -
allow: Examples of the kinds of lints that should default toallow:- The lint has a too high false positive rate.
- The lint is too opinionated.
- The lint is experimental.
- The lint is used for enforcing something that is not normally enforced.
For example, the
unsafe_codelint can be used to prevent usage of unsafe code.
More information about lint levels can be found in the rustc book and the reference.
Helpful tips and options
Finding the source of errors
There are three main ways to find where a given error is emitted:
-
grepfor either a sub-part of the error message/label or error code. This usually works well and is straightforward, but there are some cases where the code emitting the error is removed from the code where the error is constructed behind a relatively deep call-stack. Even then, it is a good way to get your bearings. -
Invoking
rustcwith the nightly-only flag-Z treat-err-as-bug=1will treat the first error being emitted as an Internal Compiler Error, which allows you to get a stack trace at the point the error has been emitted. Change the1to something else if you wish to trigger on a later error.There are limitations with this approach:
- Some calls get elided from the stack trace because they get inlined in the compiled
rustc. - The construction of the error is far away from where it is emitted,
a problem similar to the one we faced with the
grepapproach. In some cases, we buffer multiple errors in order to emit them in order.
- Some calls get elided from the stack trace because they get inlined in the compiled
-
Invoking
rustcwith-Z track-diagnosticswill print error creation locations alongside the error.
The regular development practices apply: judicious use of debug!() statements
and use of a debugger to trigger break points in order to figure out in what
order things are happening.
Span
Span is the primary data structure in rustc used to represent a
location in the code being compiled. Spans are attached to most constructs in
HIR and MIR, allowing for more informative error reporting.
A Span can be looked up in a SourceMap to get a "snippet"
useful for displaying errors with span_to_snippet and other
similar methods on the SourceMap.
Error messages
The rustc_errors crate defines most of the utilities used for
reporting errors.
Diagnostics can be implemented as types which implement the Diagnostic
trait. This is preferred for new diagnostics as it enforces a separation
between diagnostic emitting logic and the main code paths. For less-complex
diagnostics, the Diagnostic trait can be derived -- see Diagnostic
structs. Within the trait implementation, the APIs
described below can be used as normal.
DiagCtxt has methods that create and emit errors. These methods
usually have names like span_err or struct_span_err or span_warn, etc...
There are lots of them; they emit different types of "errors", such as
warnings, errors, fatal errors, suggestions, etc.
In general, there are two classes of such methods: ones that emit an error
directly and ones that allow finer control over what to emit. For example,
span_err emits the given error message at the given Span, but
struct_span_err instead returns a
Diag.
Most of these methods will accept strings, but it is recommended that typed identifiers for translatable diagnostics be used for new diagnostics (see Translation).
Diag allows you to add related notes and suggestions to an error
before emitting it by calling the emit method. (Failing to either
emit or cancel a Diag will result in an ICE.) See the
docs for more info on what you can do.
// Get a `Diag`. This does _not_ emit an error yet.
let mut err = sess.dcx.struct_span_err(sp, fluent::example::example_error);
// In some cases, you might need to check if `sp` is generated by a macro to
// avoid printing weird errors about macro-generated code.
if let Ok(snippet) = sess.source_map().span_to_snippet(sp) {
// Use the snippet to generate a suggested fix
err.span_suggestion(suggestion_sp, fluent::example::try_qux_suggestion, format!("qux {}", snippet));
} else {
// If we weren't able to generate a snippet, then emit a "help" message
// instead of a concrete "suggestion". In practice this is unlikely to be
// reached.
err.span_help(suggestion_sp, fluent::example::qux_suggestion);
}
// emit the error
err.emit();
example-example-error = oh no! this is an error!
.try-qux-suggestion = try using a qux here
.qux-suggestion = you could use a qux here instead
Suggestions
In addition to telling the user exactly why their code is wrong, it's
oftentimes furthermore possible to tell them how to fix it. To this end,
Diag offers a structured suggestions API, which formats code
suggestions pleasingly in the terminal, or (when the --error-format json flag
is passed) as JSON for consumption by tools like rustfix.
Not all suggestions should be applied mechanically, they have a degree of
confidence in the suggested code, from high
(Applicability::MachineApplicable) to low (Applicability::MaybeIncorrect).
Be conservative when choosing the level. Use the
span_suggestion method of Diag to
make a suggestion. The last argument provides a hint to tools whether
the suggestion is mechanically applicable or not.
Suggestions point to one or more spans with corresponding code that will replace their current content.
The message that accompanies them should be understandable in the following contexts:
- shown as an independent sub-diagnostic (this is the default output)
- shown as a label pointing at the affected span (this is done automatically if some heuristics for verbosity are met)
- shown as a
helpsub-diagnostic with no content (used for cases where the suggestion is obvious from the text, but we still want to let tools to apply them)) - not shown (used for very obvious cases, but we still want to allow tools to apply them)
For example, to make our qux suggestion machine-applicable, we would do:
let mut err = sess.dcx.struct_span_err(sp, fluent::example::message);
if let Ok(snippet) = sess.source_map().span_to_snippet(sp) {
err.span_suggestion(
suggestion_sp,
fluent::example::try_qux_suggestion,
format!("qux {}", snippet),
Applicability::MachineApplicable,
);
} else {
err.span_help(suggestion_sp, fluent::example::qux_suggestion);
}
err.emit();
This might emit an error like
$ rustc mycode.rs
error[E0999]: oh no! this is an error!
--> mycode.rs:3:5
|
3 | sad()
| ^ help: try using a qux here: `qux sad()`
error: aborting due to previous error
For more information about this error, try `rustc --explain E0999`.
In some cases, like when the suggestion spans multiple lines or when there are multiple suggestions, the suggestions are displayed on their own:
error[E0999]: oh no! this is an error!
--> mycode.rs:3:5
|
3 | sad()
| ^
help: try using a qux here:
|
3 | qux sad()
| ^^^
error: aborting due to previous error
For more information about this error, try `rustc --explain E0999`.
The possible values of Applicability are:
MachineApplicable: Can be applied mechanically.HasPlaceholders: Cannot be applied mechanically because it has placeholder text in the suggestions. For example:try adding a type: `let x: <type>`.MaybeIncorrect: Cannot be applied mechanically because the suggestion may or may not be a good one.Unspecified: Cannot be applied mechanically because we don't know which of the above cases it falls into.
Suggestion Style Guide
-
Suggestions should not be a question. In particular, language like "did you mean" should be avoided. Sometimes, it's unclear why a particular suggestion is being made. In these cases, it's better to be upfront about what the suggestion is.
Compare "did you mean:
Foo" vs. "there is a struct with a similar name:Foo". -
The message should not contain any phrases like "the following", "as shown", etc. Use the span to convey what is being talked about.
-
The message may contain further instruction such as "to do xyz, use" or "to do xyz, use abc".
-
The message may contain a name of a function, variable, or type, but avoid whole expressions.
Lints
The compiler linting infrastructure is defined in the rustc_middle::lint
module.
When do lints run?
Different lints will run at different times based on what information the lint needs to do its job. Some lints get grouped into passes where the lints within a pass are processed together via a single visitor. Some of the passes are:
-
Pre-expansion pass: Works on AST nodes before macro expansion. This should generally be avoided.
- Example:
keyword_identschecks for identifiers that will become keywords in future editions, but is sensitive to identifiers used in macros.
- Example:
-
Early lint pass: Works on AST nodes after macro expansion and name resolution, just before AST lowering. These lints are for purely syntactical lints.
- Example: The
unused_parenslint checks for parenthesized-expressions in situations where they are not needed, like anifcondition.
- Example: The
-
Late lint pass: Works on HIR nodes, towards the end of analysis (after borrow checking, etc.). These lints have full type information available. Most lints are late.
- Example: The
invalid_valuelint (which checks for obviously invalid uninitialized values) is a late lint because it needs type information to figure out whether a type allows being left uninitialized.
- Example: The
-
MIR pass: Works on MIR nodes. This isn't quite the same as other passes; lints that work on MIR nodes have their own methods for running.
- Example: The
arithmetic_overflowlint is emitted when it detects a constant value that may overflow.
- Example: The
Most lints work well via the pass systems, and they have a fairly
straightforward interface and easy way to integrate (mostly just implementing
a specific check function). However, some lints are easier to write when
they live on a specific code path anywhere in the compiler. For example, the
unused_mut lint is implemented in the borrow checker as it requires some
information and state in the borrow checker.
Some of these inline lints fire before the linting system is ready. Those lints will be buffered where they are held until later phases of the compiler when the linting system is ready. See Linting early in the compiler.
Lint definition terms
Lints are managed via the LintStore and get registered in
various ways. The following terms refer to the different classes of lints
generally based on how they are registered.
- Built-in lints are defined inside the compiler source.
- Driver-registered lints are registered when the compiler driver is created by an external driver. This is the mechanism used by Clippy, for example.
- Tool lints are lints with a path prefix like
clippy::orrustdoc::. - Internal lints are the
rustc::scoped tool lints that only run on the rustc source tree itself and are defined in the compiler source like a regular built-in lint.
More information about lint registration can be found in the LintStore chapter.
Declaring a lint
The built-in compiler lints are defined in the rustc_lint
crate. Lints that need to be implemented in other crates are defined in
rustc_lint_defs. You should prefer to place lints in rustc_lint if
possible. One benefit is that it is close to the dependency root, so it can be
much faster to work on.
Every lint is implemented via a struct that implements the LintPass trait
(you can also implement one of the more specific lint pass traits, either
EarlyLintPass or LateLintPass depending on when is best for your lint to run).
The trait implementation allows you to check certain syntactic constructs
as the linter walks the AST. You can then choose to emit lints in a
very similar way to compile errors.
You also declare the metadata of a particular lint via the declare_lint!
macro. This includes the name, the default level, a short description, and some
more details.
Note that the lint and the lint pass must be registered with the compiler.
For example, the following lint checks for uses
of while true { ... } and suggests using loop { ... } instead.
// Declare a lint called `WHILE_TRUE`
declare_lint! {
WHILE_TRUE,
// warn-by-default
Warn,
// This string is the lint description
"suggest using `loop { }` instead of `while true { }`"
}
// This declares a struct and a lint pass, providing a list of associated lints. The
// compiler currently doesn't use the associated lints directly (e.g., to not
// run the pass or otherwise check that the pass emits the appropriate set of
// lints). However, it's good to be accurate here as it's possible that we're
// going to register the lints via the get_lints method on our lint pass (that
// this macro generates).
declare_lint_pass!(WhileTrue => [WHILE_TRUE]);
// Helper function for `WhileTrue` lint.
// Traverse through any amount of parenthesis and return the first non-parens expression.
fn pierce_parens(mut expr: &ast::Expr) -> &ast::Expr {
while let ast::ExprKind::Paren(sub) = &expr.kind {
expr = sub;
}
expr
}
// `EarlyLintPass` has lots of methods. We only override the definition of
// `check_expr` for this lint because that's all we need, but you could
// override other methods for your own lint. See the rustc docs for a full
// list of methods.
impl EarlyLintPass for WhileTrue {
fn check_expr(&mut self, cx: &EarlyContext<'_>, e: &ast::Expr) {
if let ast::ExprKind::While(cond, ..) = &e.kind
&& let ast::ExprKind::Lit(ref lit) = pierce_parens(cond).kind
&& let ast::LitKind::Bool(true) = lit.kind
&& !lit.span.from_expansion()
{
let condition_span = cx.sess.source_map().guess_head_span(e.span);
cx.struct_span_lint(WHILE_TRUE, condition_span, |lint| {
lint.build(fluent::example::use_loop)
.span_suggestion_short(
condition_span,
fluent::example::suggestion,
"loop".to_owned(),
Applicability::MachineApplicable,
)
.emit();
})
}
}
}
example-use-loop = denote infinite loops with `loop {"{"} ... {"}"}`
.suggestion = use `loop`
Edition-gated lints
Sometimes we want to change the behavior of a lint in a new edition. To do this,
we just add the transition to our invocation of declare_lint!:
declare_lint! {
pub ANONYMOUS_PARAMETERS,
Allow,
"detects anonymous parameters",
Edition::Edition2018 => Warn,
}
This makes the ANONYMOUS_PARAMETERS lint allow-by-default in the 2015 edition
but warn-by-default in the 2018 edition.
See Edition-specific lints for more information.
Feature-gated lints
Lints belonging to a feature should only be usable if the feature is enabled in the crate. To support this, lint declarations can contain a feature gate like so:
declare_lint! {
pub SOME_LINT_NAME,
Warn,
"a new and useful, but feature gated lint",
@feature_gate = sym::feature_name;
}
Future-incompatible lints
The use of the term future-incompatible within the compiler has a slightly
broader meaning than what rustc exposes to users of the compiler.
Inside rustc, future-incompatible lints are for signalling to the user that code they have written may not compile in the future. In general, future-incompatible code exists for two reasons:
- The user has written unsound code that the compiler mistakenly accepted. While it is within Rust's backwards compatibility guarantees to fix the soundness hole (breaking the user's code), the lint is there to warn the user that this will happen in some upcoming version of rustc regardless of which edition the code uses. This is the meaning that rustc exclusively exposes to users as "future incompatible".
- The user has written code that will either no longer compiler or will change
meaning in an upcoming edition. These are often called "edition lints" and can be
typically seen in the various "edition compatibility" lint groups (e.g.,
rust_2021_compatibility) that are used to lint against code that will break if the user updates the crate's edition. See migration lints for more details.
A future-incompatible lint should be declared with the @future_incompatible
additional "field":
declare_lint! {
pub ANONYMOUS_PARAMETERS,
Allow,
"detects anonymous parameters",
@future_incompatible = FutureIncompatibleInfo {
reference: "issue #41686 <https://github.com/rust-lang/rust/issues/41686>",
reason: FutureIncompatibilityReason::EditionError(Edition::Edition2018),
};
}
Notice the reason field which describes why the future incompatible change is happening.
This will change the diagnostic message the user receives as well as determine which
lint groups the lint is added to. In the example above, the lint is an "edition lint"
(since its "reason" is EditionError), signifying to the user that the use of anonymous
parameters will no longer compile in Rust 2018 and beyond.
Inside LintStore::register_lints, lints with future_incompatible
fields get placed into either edition-based lint groups (if their reason is tied to
an edition) or into the future_incompatibility lint group.
If you need a combination of options that's not supported by the
declare_lint! macro, you can always change the declare_lint! macro
to support this.
Renaming or removing a lint
If it is determined that a lint is either improperly named or no longer needed,
the lint must be registered for renaming or removal, which will trigger a warning if a user tries
to use the old lint name. To declare a rename/remove, add a line with
store.register_renamed or store.register_removed to the code of the
rustc_lint::register_builtins function.
store.register_renamed("single_use_lifetime", "single_use_lifetimes");
Lint Groups
Lints can be turned on in groups. These groups are declared in the
register_builtins function in rustc_lint::lib. The
add_lint_group! macro is used to declare a new group.
For example,
add_lint_group!(sess,
"nonstandard_style",
NON_CAMEL_CASE_TYPES,
NON_SNAKE_CASE,
NON_UPPER_CASE_GLOBALS);
This defines the nonstandard_style group which turns on the listed lints. A
user can turn on these lints with a !#[warn(nonstandard_style)] attribute in
the source code, or by passing -W nonstandard-style on the command line.
Some lint groups are created automatically in LintStore::register_lints. For instance,
any lint declared with FutureIncompatibleInfo where the reason is
FutureIncompatibilityReason::FutureReleaseError (the default when
@future_incompatible is used in declare_lint!), will be added to
the future_incompatible lint group. Editions also have their own lint groups
(e.g., rust_2021_compatibility) automatically generated for any lints signaling
future-incompatible code that will break in the specified edition.
Linting early in the compiler
On occasion, you may need to define a lint that runs before the linting system has been initialized (e.g. during parsing or macro expansion). This is problematic because we need to have computed lint levels to know whether we should emit a warning or an error or nothing at all.
To solve this problem, we buffer the lints until the linting system is
processed. Session and ParseSess both have
buffer_lint methods that allow you to buffer a lint for later. The linting
system automatically takes care of handling buffered lints later.
Thus, to define a lint that runs early in the compilation, one defines a lint
like normal but invokes the lint with buffer_lint.
Linting even earlier in the compiler
The parser (rustc_ast) is interesting in that it cannot have dependencies on
any of the other rustc* crates. In particular, it cannot depend on
rustc_middle::lint or rustc_lint, where all of the compiler linting
infrastructure is defined. That's troublesome!
To solve this, rustc_ast defines its own buffered lint type, which
ParseSess::buffer_lint uses. After macro expansion, these buffered lints are
then dumped into the Session::buffered_lints used by the rest of the compiler.
JSON diagnostic output
The compiler accepts an --error-format json flag to output
diagnostics as JSON objects (for the benefit of tools such as cargo fix). It looks like this:
$ rustc json_error_demo.rs --error-format json
{"message":"cannot add `&str` to `{integer}`","code":{"code":"E0277","explanation":"\nYou tried to use a type which doesn't implement some trait in a place which\nexpected that trait. Erroneous code example:\n\n```compile_fail,E0277\n// here we declare the Foo trait with a bar method\ntrait Foo {\n fn bar(&self);\n}\n\n// we now declare a function which takes an object implementing the Foo trait\nfn some_func<T: Foo>(foo: T) {\n foo.bar();\n}\n\nfn main() {\n // we now call the method with the i32 type, which doesn't implement\n // the Foo trait\n some_func(5i32); // error: the trait bound `i32 : Foo` is not satisfied\n}\n```\n\nIn order to fix this error, verify that the type you're using does implement\nthe trait. Example:\n\n```\ntrait Foo {\n fn bar(&self);\n}\n\nfn some_func<T: Foo>(foo: T) {\n foo.bar(); // we can now use this method since i32 implements the\n // Foo trait\n}\n\n// we implement the trait on the i32 type\nimpl Foo for i32 {\n fn bar(&self) {}\n}\n\nfn main() {\n some_func(5i32); // ok!\n}\n```\n\nOr in a generic context, an erroneous code example would look like:\n\n```compile_fail,E0277\nfn some_func<T>(foo: T) {\n println!(\"{:?}\", foo); // error: the trait `core::fmt::Debug` is not\n // implemented for the type `T`\n}\n\nfn main() {\n // We now call the method with the i32 type,\n // which *does* implement the Debug trait.\n some_func(5i32);\n}\n```\n\nNote that the error here is in the definition of the generic function: Although\nwe only call it with a parameter that does implement `Debug`, the compiler\nstill rejects the function: It must work with all possible input types. In\norder to make this example compile, we need to restrict the generic type we're\naccepting:\n\n```\nuse std::fmt;\n\n// Restrict the input type to types that implement Debug.\nfn some_func<T: fmt::Debug>(foo: T) {\n println!(\"{:?}\", foo);\n}\n\nfn main() {\n // Calling the method is still fine, as i32 implements Debug.\n some_func(5i32);\n\n // This would fail to compile now:\n // struct WithoutDebug;\n // some_func(WithoutDebug);\n}\n```\n\nRust only looks at the signature of the called function, as such it must\nalready specify all requirements that will be used for every type parameter.\n"},"level":"error","spans":[{"file_name":"json_error_demo.rs","byte_start":50,"byte_end":51,"line_start":4,"line_end":4,"column_start":7,"column_end":8,"is_primary":true,"text":[{"text":" a + b","highlight_start":7,"highlight_end":8}],"label":"no implementation for `{integer} + &str`","suggested_replacement":null,"suggestion_applicability":null,"expansion":null}],"children":[{"message":"the trait `std::ops::Add<&str>` is not implemented for `{integer}`","code":null,"level":"help","spans":[],"children":[],"rendered":null}],"rendered":"error[E0277]: cannot add `&str` to `{integer}`\n --> json_error_demo.rs:4:7\n |\n4 | a + b\n | ^ no implementation for `{integer} + &str`\n |\n = help: the trait `std::ops::Add<&str>` is not implemented for `{integer}`\n\n"}
{"message":"aborting due to previous error","code":null,"level":"error","spans":[],"children":[],"rendered":"error: aborting due to previous error\n\n"}
{"message":"For more information about this error, try `rustc --explain E0277`.","code":null,"level":"","spans":[],"children":[],"rendered":"For more information about this error, try `rustc --explain E0277`.\n"}
Note that the output is a series of lines, each of which is a JSON
object, but the series of lines taken together is, unfortunately, not
valid JSON, thwarting tools and tricks (such as piping to python3 -m json.tool)
that require such. (One speculates that this was intentional for LSP
performance purposes, so that each line/object can be sent as
it is flushed?)
Also note the "rendered" field, which contains the "human" output as a string; this was introduced so that UI tests could both make use of the structured JSON and see the "human" output (well, sans colors) without having to compile everything twice.
The "human" readable and the json format emitter can be found under
rustc_errors, both were moved from the rustc_ast crate to the
rustc_errors crate.
The JSON emitter defines its own Diagnostic
struct
(and sub-structs) for the JSON serialization. Don't confuse this with
errors::Diag!
#[rustc_on_unimplemented(...)]
The #[rustc_on_unimplemented] attribute allows trait definitions to add specialized
notes to error messages when an implementation was expected but not found.
You can refer to the trait's generic arguments by name and to the resolved type using Self.
For example:
#![feature(rustc_attrs)]
#[rustc_on_unimplemented="an iterator over elements of type `{A}` \
cannot be built from a collection of type `{Self}`"]
trait MyIterator<A> {
fn next(&mut self) -> A;
}
fn iterate_chars<I: MyIterator<char>>(i: I) {
// ...
}
fn main() {
iterate_chars(&[1, 2, 3][..]);
}
When the user compiles this, they will see the following;
error[E0277]: the trait bound `&[{integer}]: MyIterator<char>` is not satisfied
--> <anon>:14:5
|
14 | iterate_chars(&[1, 2, 3][..]);
| ^^^^^^^^^^^^^ an iterator over elements of type `char` cannot be built from a collection of type `&[{integer}]`
|
= help: the trait `MyIterator<char>` is not implemented for `&[{integer}]`
= note: required by `iterate_chars`
rustc_on_unimplemented also supports advanced filtering for better targeting
of messages, as well as modifying specific parts of the error message. You
target the text of:
- the main error message (
message) - the label (
label) - an extra note (
note)
For example, the following attribute
#[rustc_on_unimplemented(
message="message",
label="label",
note="note"
)]
trait MyIterator<A> {
fn next(&mut self) -> A;
}
Would generate the following output:
error[E0277]: message
--> <anon>:14:5
|
14 | iterate_chars(&[1, 2, 3][..]);
| ^^^^^^^^^^^^^ label
|
= note: note
= help: the trait `MyIterator<char>` is not implemented for `&[{integer}]`
= note: required by `iterate_chars`
To allow more targeted error messages, it is possible to filter the
application of these fields based on a variety of attributes when using
on:
crate_local: whether the code causing the trait bound to not be fulfilled is part of the user's crate. This is used to avoid suggesting code changes that would require modifying a dependency.- Any of the generic arguments that can be substituted in the text can be
referred by name as well for filtering, like
Rhs="i32", except forSelf. _Self: to filter only on a particular calculated trait resolution, likeSelf="std::iter::Iterator<char>". This is needed becauseSelfis a keyword which cannot appear in attributes.direct: user-specified rather than derived obligation.from_method: usable both as boolean (whether the flag is present, likecrate_local) or matching against a particular method. Currently used fortry.from_desugaring: usable both as boolean (whether the flag is present) or matching against a particular desugaring. The desugaring is identified with its variant name in theDesugaringKindenum.
For example, the Iterator trait can be annotated in the following way:
#[rustc_on_unimplemented(
on(
_Self="&str",
note="call `.chars()` or `.as_bytes()` on `{Self}`"
),
message="`{Self}` is not an iterator",
label="`{Self}` is not an iterator",
note="maybe try calling `.iter()` or a similar method"
)]
pub trait Iterator {}
Which would produce the following outputs:
error[E0277]: `Foo` is not an iterator
--> src/main.rs:4:16
|
4 | for foo in Foo {}
| ^^^ `Foo` is not an iterator
|
= note: maybe try calling `.iter()` or a similar method
= help: the trait `std::iter::Iterator` is not implemented for `Foo`
= note: required by `std::iter::IntoIterator::into_iter`
error[E0277]: `&str` is not an iterator
--> src/main.rs:5:16
|
5 | for foo in "" {}
| ^^ `&str` is not an iterator
|
= note: call `.chars()` or `.bytes() on `&str`
= help: the trait `std::iter::Iterator` is not implemented for `&str`
= note: required by `std::iter::IntoIterator::into_iter`
If you need to filter on multiple attributes, you can use all, any or
not in the following way:
#[rustc_on_unimplemented(
on(
all(_Self="&str", T="std::string::String"),
note="you can coerce a `{T}` into a `{Self}` by writing `&*variable`"
)
)]
pub trait From<T>: Sized { /* ... */ }
Diagnostic and subdiagnostic structs
rustc has three diagnostic traits that can be used to create diagnostics:
Diagnostic, LintDiagnostic, and Subdiagnostic. For simple diagnostics,
instead of using the Diag API to create and emit diagnostics,
derived impls can be used. They are only suitable for simple diagnostics that
don't require much logic in deciding whether or not to add additional
subdiagnostics.
Such diagnostic can be translated into different languages and each has a slug that uniquely identifies the diagnostic.
#[derive(Diagnostic)] and #[derive(LintDiagnostic)]
Consider the definition of the "field already declared" diagnostic shown below:
#[derive(Diagnostic)]
#[diag(hir_analysis_field_already_declared, code = E0124)]
pub struct FieldAlreadyDeclared {
pub field_name: Ident,
#[primary_span]
#[label]
pub span: Span,
#[label(previous_decl_label)]
pub prev_span: Span,
}
Diagnostic can only be derived on structs and enums.
Attributes that are placed on the type for structs are placed on each
variants for enums (or vice versa). Each Diagnostic has to have one
attribute, #[diag(...)], applied to the struct or each enum variant.
If an error has an error code (e.g. "E0624"), then that can be specified using
the code sub-attribute. Specifying a code isn't mandatory, but if you are
porting a diagnostic that uses Diag to use Diagnostic
then you should keep the code if there was one.
#[diag(..)] must provide a slug as the first positional argument (a path to an
item in rustc_errors::fluent::*). A slug uniquely identifies the diagnostic
and is also how the compiler knows what error message to emit (in the default
locale of the compiler, or in the locale requested by the user). See
translation documentation to learn more about how
translatable error messages are written and how slug items are generated.
In our example, the Fluent message for the "field already declared" diagnostic looks like this:
hir_analysis_field_already_declared =
field `{$field_name}` is already declared
.label = field already declared
.previous_decl_label = `{$field_name}` first declared here
hir_analysis_field_already_declared is the slug from our example and is followed
by the diagnostic message.
Every field of the Diagnostic which does not have an annotation is
available in Fluent messages as a variable, like field_name in the example
above. Fields can be annotated #[skip_arg] if this is undesired.
Using the #[primary_span] attribute on a field (that has type Span)
indicates the primary span of the diagnostic which will have the main message
of the diagnostic.
Diagnostics are more than just their primary message, they often include
labels, notes, help messages and suggestions, all of which can also be
specified on a Diagnostic.
#[label], #[help], #[warning] and #[note] can all be applied to fields which have the
type Span. Applying any of these attributes will create the corresponding
subdiagnostic with that Span. These attributes will look for their
diagnostic message in a Fluent attribute attached to the primary Fluent
message. In our example, #[label] will look for
hir_analysis_field_already_declared.label (which has the message "field already
declared"). If there is more than one subdiagnostic of the same type, then
these attributes can also take a value that is the attribute name to look for
(e.g. previous_decl_label in our example).
Other types have special behavior when used in a Diagnostic derive:
- Any attribute applied to an
Option<T>will only emit a subdiagnostic if the option isSome(..). - Any attribute applied to a
Vec<T>will be repeated for each element of the vector.
#[help], #[warning] and #[note] can also be applied to the struct itself, in which case
they work exactly like when applied to fields except the subdiagnostic won't
have a Span. These attributes can also be applied to fields of type () for
the same effect, which when combined with the Option type can be used to
represent optional #[note]/#[help]/#[warning] subdiagnostics.
Suggestions can be emitted using one of four field attributes:
#[suggestion(slug, code = "...", applicability = "...")]#[suggestion_hidden(slug, code = "...", applicability = "...")]#[suggestion_short(slug, code = "...", applicability = "...")]#[suggestion_verbose(slug, code = "...", applicability = "...")]
Suggestions must be applied on either a Span field or a (Span, MachineApplicability) field. Similarly to other field attributes, the slug
specifies the Fluent attribute with the message and defaults to the equivalent
of .suggestion. code specifies the code that should be suggested as a
replacement and is a format string (e.g. {field_name} would be replaced by
the value of the field_name field of the struct), not a Fluent identifier.
applicability can be used to specify the applicability in the attribute, it
cannot be used when the field's type contains an Applicability.
In the end, the Diagnostic derive will generate an implementation of
Diagnostic that looks like the following:
impl<'a, G: EmissionGuarantee> Diagnostic<'a> for FieldAlreadyDeclared {
fn into_diag(self, dcx: &'a DiagCtxt, level: Level) -> Diag<'a, G> {
let mut diag = Diag::new(dcx, level, fluent::hir_analysis_field_already_declared);
diag.set_span(self.span);
diag.span_label(
self.span,
fluent::hir_analysis_label
);
diag.span_label(
self.prev_span,
fluent::hir_analysis_previous_decl_label
);
diag
}
}
Now that we've defined our diagnostic, how do we use it? It's quite
straightforward, just create an instance of the struct and pass it to
emit_err (or emit_warning):
tcx.dcx().emit_err(FieldAlreadyDeclared {
field_name: f.ident,
span: f.span,
prev_span,
});
Reference
#[derive(Diagnostic)] and #[derive(LintDiagnostic)] support the
following attributes:
#[diag(slug, code = "...")]- Applied to struct or enum variant.
- Mandatory
- Defines the text and error code to be associated with the diagnostic.
- Slug (Mandatory)
- Uniquely identifies the diagnostic and corresponds to its Fluent message, mandatory.
- A path to an item in
rustc_errors::fluent, e.g.rustc_errors::fluent::hir_analysis_field_already_declared(rustc_errors::fluentis implicit in the attribute, so justhir_analysis_field_already_declared). - See translation documentation.
code = "..."(Optional)- Specifies the error code.
#[note]or#[note(slug)](Optional)- Applied to struct or struct fields of type
Span,Option<()>or(). - Adds a note subdiagnostic.
- Value is a path to an item in
rustc_errors::fluentfor the note's message.- Defaults to equivalent of
.note.
- Defaults to equivalent of
- If applied to a
Spanfield, creates a spanned note.
- Applied to struct or struct fields of type
#[help]or#[help(slug)](Optional)- Applied to struct or struct fields of type
Span,Option<()>or(). - Adds a help subdiagnostic.
- Value is a path to an item in
rustc_errors::fluentfor the note's message.- Defaults to equivalent of
.help.
- Defaults to equivalent of
- If applied to a
Spanfield, creates a spanned help.
- Applied to struct or struct fields of type
#[label]or#[label(slug)](Optional)- Applied to
Spanfields. - Adds a label subdiagnostic.
- Value is a path to an item in
rustc_errors::fluentfor the note's message.- Defaults to equivalent of
.label.
- Defaults to equivalent of
- Applied to
#[warning]or#[warning(slug)](Optional)- Applied to struct or struct fields of type
Span,Option<()>or(). - Adds a warning subdiagnostic.
- Value is a path to an item in
rustc_errors::fluentfor the note's message.- Defaults to equivalent of
.warn.
- Defaults to equivalent of
- Applied to struct or struct fields of type
#[suggestion{,_hidden,_short,_verbose}(slug, code = "...", applicability = "...")](Optional)- Applied to
(Span, MachineApplicability)orSpanfields. - Adds a suggestion subdiagnostic.
- Slug (Mandatory)
- A path to an item in
rustc_errors::fluent, e.g.rustc_errors::fluent::hir_analysis_field_already_declared(rustc_errors::fluentis implicit in the attribute, so justhir_analysis_field_already_declared). Fluent attributes for all messages exist as top-level items in that module (sohir_analysis_message.attris justattr). - See translation documentation.
- Defaults to
rustc_errors::fluent::_subdiag::suggestion(or .suggestionin Fluent).
- A path to an item in
code = "..."/code("...", ...)(Mandatory)- One or multiple format strings indicating the code to be suggested as a replacement. Multiple values signify multiple possible replacements.
applicability = "..."(Optional)- String which must be one of
machine-applicable,maybe-incorrect,has-placeholdersorunspecified.
- String which must be one of
- Applied to
#[subdiagnostic]- Applied to a type that implements
Subdiagnostic(from#[derive(Subdiagnostic)]). - Adds the subdiagnostic represented by the subdiagnostic struct.
- Applied to a type that implements
#[primary_span](Optional)- Applied to
Spanfields onSubdiagnostics. Not used forLintDiagnostics. - Indicates the primary span of the diagnostic.
- Applied to
#[skip_arg](Optional)- Applied to any field.
- Prevents the field from being provided as a diagnostic argument.
#[derive(Subdiagnostic)]
It is common in the compiler to write a function that conditionally adds a
specific subdiagnostic to an error if it is applicable. Oftentimes these
subdiagnostics could be represented using a diagnostic struct even if the
overall diagnostic could not. In this circumstance, the Subdiagnostic
derive can be used to represent a partial diagnostic (e.g a note, label, help or
suggestion) as a struct.
Consider the definition of the "expected return type" label shown below:
#![allow(unused)] fn main() { #[derive(Subdiagnostic)] pub enum ExpectedReturnTypeLabel<'tcx> { #[label(hir_analysis_expected_default_return_type)] Unit { #[primary_span] span: Span, }, #[label(hir_analysis_expected_return_type)] Other { #[primary_span] span: Span, expected: Ty<'tcx>, }, } }
Like Diagnostic, Subdiagnostic can be derived for structs or
enums. Attributes that are placed on the type for structs are placed on each
variants for enums (or vice versa). Each Subdiagnostic should have one
attribute applied to the struct or each variant, one of:
#[label(..)]for defining a label#[note(..)]for defining a note#[help(..)]for defining a help#[warning(..)]for defining a warning#[suggestion{,_hidden,_short,_verbose}(..)]for defining a suggestion
All of the above must provide a slug as the first positional argument (a path
to an item in rustc_errors::fluent::*). A slug uniquely identifies the
diagnostic and is also how the compiler knows what error message to emit (in
the default locale of the compiler, or in the locale requested by the user).
See translation documentation to learn more about how
translatable error messages are written and how slug items are generated.
In our example, the Fluent message for the "expected return type" label looks like this:
hir_analysis_expected_default_return_type = expected `()` because of default return type
hir_analysis_expected_return_type = expected `{$expected}` because of return type
Using the #[primary_span] attribute on a field (with type Span) will denote
the primary span of the subdiagnostic. A primary span is only necessary for a
label or suggestion, which can not be spanless.
Every field of the type/variant which does not have an annotation is available
in Fluent messages as a variable. Fields can be annotated #[skip_arg] if this
is undesired.
Like Diagnostic, Subdiagnostic supports Option<T> and
Vec<T> fields.
Suggestions can be emitted using one of four attributes on the type/variant:
#[suggestion(..., code = "...", applicability = "...")]#[suggestion_hidden(..., code = "...", applicability = "...")]#[suggestion_short(..., code = "...", applicability = "...")]#[suggestion_verbose(..., code = "...", applicability = "...")]
Suggestions require #[primary_span] be set on a field and can have the
following sub-attributes:
- The first positional argument specifies the path to a item in
rustc_errors::fluentcorresponding to the Fluent attribute with the message and defaults to the equivalent of.suggestion. codespecifies the code that should be suggested as a replacement and is a format string (e.g.{field_name}would be replaced by the value of thefield_namefield of the struct), not a Fluent identifier.applicabilitycan be used to specify the applicability in the attribute, it cannot be used when the field's type contains anApplicability.
Applicabilities can also be specified as a field (of type Applicability)
using the #[applicability] attribute.
In the end, the Subdiagnostic derive will generate an implementation
of Subdiagnostic that looks like the following:
#![allow(unused)] fn main() { impl<'tcx> Subdiagnostic for ExpectedReturnTypeLabel<'tcx> { fn add_to_diag(self, diag: &mut rustc_errors::Diagnostic) { use rustc_errors::{Applicability, IntoDiagArg}; match self { ExpectedReturnTypeLabel::Unit { span } => { diag.span_label(span, rustc_errors::fluent::hir_analysis_expected_default_return_type) } ExpectedReturnTypeLabel::Other { span, expected } => { diag.set_arg("expected", expected); diag.span_label(span, rustc_errors::fluent::hir_analysis_expected_return_type) } } } } }
Once defined, a subdiagnostic can be used by passing it to the subdiagnostic
function (example and example) on a
diagnostic or by assigning it to a #[subdiagnostic]-annotated field of a
diagnostic struct.
Reference
#[derive(Subdiagnostic)] supports the following attributes:
#[label(slug)],#[help(slug)],#[warning(slug)]or#[note(slug)]- Applied to struct or enum variant. Mutually exclusive with struct/enum variant attributes.
- Mandatory
- Defines the type to be representing a label, help or note.
- Slug (Mandatory)
- Uniquely identifies the diagnostic and corresponds to its Fluent message, mandatory.
- A path to an item in
rustc_errors::fluent, e.g.rustc_errors::fluent::hir_analysis_field_already_declared(rustc_errors::fluentis implicit in the attribute, so justhir_analysis_field_already_declared). - See translation documentation.
#[suggestion{,_hidden,_short,_verbose}(slug, code = "...", applicability = "...")]- Applied to struct or enum variant. Mutually exclusive with struct/enum variant attributes.
- Mandatory
- Defines the type to be representing a suggestion.
- Slug (Mandatory)
- A path to an item in
rustc_errors::fluent, e.g.rustc_errors::fluent::hir_analysis_field_already_declared(rustc_errors::fluentis implicit in the attribute, so justhir_analysis::field_already_declared). Fluent attributes for all messages exist as top-level items in that module (sohir_analysis_message.attris justhir_analysis::attr). - See translation documentation.
- Defaults to
rustc_errors::fluent::_subdiag::suggestion(or .suggestionin Fluent).
- A path to an item in
code = "..."/code("...", ...)(Mandatory)- One or multiple format strings indicating the code to be suggested as a replacement. Multiple values signify multiple possible replacements.
applicability = "..."(Optional)- Mutually exclusive with
#[applicability]on a field. - Value is the applicability of the suggestion.
- String which must be one of:
machine-applicablemaybe-incorrecthas-placeholdersunspecified
- Mutually exclusive with
#[multipart_suggestion{,_hidden,_short,_verbose}(slug, applicability = "...")]- Applied to struct or enum variant. Mutually exclusive with struct/enum variant attributes.
- Mandatory
- Defines the type to be representing a multipart suggestion.
- Slug (Mandatory): see
#[suggestion] applicability = "..."(Optional): see#[suggestion]
#[primary_span](Mandatory for labels and suggestions; optional otherwise; not applicable to multipart suggestions)- Applied to
Spanfields. - Indicates the primary span of the subdiagnostic.
- Applied to
#[suggestion_part(code = "...")](Mandatory; only applicable to multipart suggestions)- Applied to
Spanfields. - Indicates the span to be one part of the multipart suggestion.
code = "..."(Mandatory)- Value is a format string indicating the code to be suggested as a replacement.
- Applied to
#[applicability](Optional; only applicable to (simple and multipart) suggestions)- Applied to
Applicabilityfields. - Indicates the applicability of the suggestion.
- Applied to
#[skip_arg](Optional)- Applied to any field.
- Prevents the field from being provided as a diagnostic argument.
Translation
Please see the tracking issue https://github.com/rust-lang/rust/issues/132181 for status updates.
We have downgraded the internal lints untranslatable_diagnostic and
diagnostic_outside_of_impl. Those internal lints previously required new code
to use the current translation infrastructure. However, because the translation
infra is waiting for a yet-to-be-proposed redesign and thus rework, we are not
mandating usage of current translation infra. Use the infra if you want to or
otherwise makes the code cleaner, but otherwise sidestep the translation infra
if you need more flexibility.
rustc's diagnostic infrastructure supports translatable diagnostics using Fluent.
Writing translatable diagnostics
There are two ways of writing translatable diagnostics:
- For simple diagnostics, using a diagnostic (or subdiagnostic) derive. ("Simple" diagnostics being those that don't require a lot of logic in deciding to emit subdiagnostics and can therefore be represented as diagnostic structs). See the diagnostic and subdiagnostic structs documentation.
- Using typed identifiers with
DiagAPIs (inDiagnosticorSubdiagnosticorLintDiagnosticimplementations).
When adding or changing a translatable diagnostic,
you don't need to worry about the translations.
Only updating the original English message is required.
Currently,
each crate which defines translatable diagnostics has its own Fluent resource,
which is a file named messages.ftl,
located in the root of the crate
(such ascompiler/rustc_expand/messages.ftl).
Fluent
Fluent is built around the idea of "asymmetric localization", which aims to decouple the expressiveness of translations from the grammar of the source language (English in rustc's case). Prior to translation, rustc's diagnostics relied heavily on interpolation to build the messages shown to the users. Interpolated strings are hard to translate because writing a natural-sounding translation might require more, less, or just different interpolation than the English string, all of which would require changes to the compiler's source code to support.
Diagnostic messages are defined in Fluent resources. A combined set of Fluent
resources for a given locale (e.g. en-US) is known as Fluent bundle.
typeck_address_of_temporary_taken = cannot take address of a temporary
In the above example, typeck_address_of_temporary_taken is the identifier for
a Fluent message and corresponds to the diagnostic message in English. Other
Fluent resources can be written which would correspond to a message in another
language. Each diagnostic therefore has at least one Fluent message.
typeck_address_of_temporary_taken = cannot take address of a temporary
.label = temporary value
By convention, diagnostic messages for subdiagnostics are specified as
"attributes" on Fluent messages (additional related messages, denoted by the
.<attribute-name> syntax). In the above example, label is an attribute of
typeck_address_of_temporary_taken which corresponds to the message for the
label added to this diagnostic.
Diagnostic messages often interpolate additional context into the message shown to the user, such as the name of a type or of a variable. Additional context to Fluent messages is provided as an "argument" to the diagnostic.
typeck_struct_expr_non_exhaustive =
cannot create non-exhaustive {$what} using struct expression
In the above example, the Fluent message refers to an argument named what
which is expected to exist (how arguments are provided to diagnostics is
discussed in detail later).
You can consult the Fluent documentation for other usage examples of Fluent and its syntax.
Guideline for message naming
Usually, fluent uses - for separating words inside a message name. However,
_ is accepted by fluent as well. As _ fits Rust's use cases better, due to
the identifiers on the Rust side using _ as well, inside rustc, - is not
allowed for separating words, and instead _ is recommended. The only exception
is for leading -s, for message names like -passes_see_issue.
Guidelines for writing translatable messages
For a message to be translatable into different languages, all of the information required by any language must be provided to the diagnostic as an argument (not just the information required in the English message).
As the compiler team gain more experience writing diagnostics that have all of the information necessary to be translated into different languages, this page will be updated with more guidance. For now, the Fluent documentation has excellent examples of translating messages into different locales and the information that needs to be provided by the code to do so.
Compile-time validation and typed identifiers
rustc's fluent_messages macro performs compile-time validation of Fluent
resources and generates code to make it easier to refer to Fluent messages in
diagnostics.
Compile-time validation of Fluent resources will emit any parsing errors from Fluent resources while building the compiler, preventing invalid Fluent resources from causing panics in the compiler. Compile-time validation also emits an error if multiple Fluent messages have the same identifier.
Internals
Various parts of rustc's diagnostic internals are modified in order to support translation.
Messages
All of rustc's traditional diagnostic APIs (e.g. struct_span_err or note)
take any message that can be converted into a DiagMessage (or
SubdiagMessage).
rustc_error_messages::DiagMessage can represent legacy non-translatable
diagnostic messages and translatable messages. Non-translatable messages are
just Strings. Translatable messages are just a &'static str with the
identifier of the Fluent message (sometimes with an additional &'static str
with an attribute).
DiagMessage never needs to be interacted with directly:
DiagMessage constants are created for each diagnostic message in a
Fluent resource (described in more detail below), or DiagMessages will
either be created in the macro-generated code of a diagnostic derive.
rustc_error_messages::SubdiagMessage is similar, it can correspond to a
legacy non-translatable diagnostic message or the name of an attribute to a
Fluent message. Translatable SubdiagMessages must be combined with a
DiagMessage (using DiagMessage::with_subdiagnostic_message) to
be emitted (an attribute name on its own is meaningless without a corresponding
message identifier, which is what DiagMessage provides).
Both DiagMessage and SubdiagMessage implement Into for any
type that can be converted into a string, and converts these into
non-translatable diagnostics - this keeps all existing diagnostic calls
working.
Arguments
Additional context for Fluent messages which are interpolated into message contents needs to be provided to translatable diagnostics.
Diagnostics have a set_arg function that can be used to provide this
additional context to a diagnostic.
Arguments have both a name (e.g. "what" in the earlier example) and a value.
Argument values are represented using the DiagArgValue type, which is
just a string or a number. rustc types can implement IntoDiagArg with
conversion into a string or a number, and common types like Ty<'tcx> already
have such implementations.
set_arg calls are handled transparently by diagnostic derives but need to be
added manually when using diagnostic builder APIs.
Loading
rustc makes a distinction between the "fallback bundle" for en-US that is used
by default and when another locale is missing a message; and the primary fluent
bundle which is requested by the user.
Diagnostic emitters implement the Emitter trait which has two functions for
accessing the fallback and primary fluent bundles (fallback_fluent_bundle and
fluent_bundle respectively).
Emitter also has member functions with default implementations for performing
translation of a DiagMessage using the results of
fallback_fluent_bundle and fluent_bundle.
All of the emitters in rustc load the fallback Fluent bundle lazily, only
reading Fluent resources and parsing them when an error message is first being
translated (for performance reasons - it doesn't make sense to do this if no
error is being emitted). rustc_error_messages::fallback_fluent_bundle returns
a std::lazy::Lazy<FluentBundle> which is provided to emitters and evaluated
in the first call to Emitter::fallback_fluent_bundle.
The primary Fluent bundle (for the user's desired locale) is expected to be
returned by Emitter::fluent_bundle. This bundle is used preferentially when
translating messages, the fallback bundle is only used if the primary bundle is
missing a message or not provided.
There are no locale bundles distributed with the compiler, but mechanisms are implemented for loading them.
-Ztranslate-additional-ftlcan be used to load a specific resource as the primary bundle for testing purposes.-Ztranslate-langcan be provided a language identifier (something likeen-US) and will load any Fluent resources found in$sysroot/share/locale/$locale/directory (both the user provided sysroot and any sysroot candidates).
Primary bundles are not currently loaded lazily and if requested will be loaded at the start of compilation regardless of whether an error occurs. Lazily loading primary bundles is possible if it can be assumed that loading a bundle won't fail. Bundle loading can fail if a requested locale is missing, Fluent files are malformed, or a message is duplicated in multiple resources.
Lints
This page documents some of the machinery around lint registration and how we run lints in the compiler.
The LintStore is the central piece of infrastructure, around which
everything rotates. The LintStore is held as part of the Session, and it
gets populated with the list of lints shortly after the Session is created.
Lints vs. lint passes
There are two parts to the linting mechanism within the compiler: lints and lint passes. Unfortunately, a lot of the documentation we have refers to both of these as just "lints."
First, we have the lint declarations themselves,
and this is where the name and default lint level and other metadata come from.
These are normally defined by way of the declare_lint! macro,
which boils down to a static with type &rustc_lint_defs::Lint
(although this may change in the future,
as the macro is somewhat unwieldy to add new fields to,
like all macros).
As of Aug 2022, we lint against direct declarations without the use of the macro.
Lint declarations don't carry any "state" - they are merely global identifiers and descriptions of lints. We assert at runtime that they are not registered twice (by lint name).
Lint passes are the meat of any lint. Notably, there is not a one-to-one relationship between lints and lint passes; a lint might not have any lint pass that emits it, it could have many, or just one -- the compiler doesn't track whether a pass is in any way associated with a particular lint, and frequently lints are emitted as part of other work (e.g., type checking, etc.).
Registration
High-level overview
In rustc_interface::run_compiler,
the LintStore is created,
and all lints are registered.
There are three 'sources' of lints:
- internal lints: lints only used by the rustc codebase
- builtin lints: lints built into the compiler and not provided by some outside source
rustc_interface::Configregister_lints: lints passed into the compiler during construction
Lints are registered via the LintStore::register_lint function. This should
happen just once for any lint, or an ICE will occur.
Once the registration is complete, we "freeze" the lint store by placing it in
an Lrc.
Lint passes are registered separately into one of the categories
(pre-expansion, early, late, late module). Passes are registered as a closure
-- i.e., impl Fn() -> Box<dyn X>, where dyn X is either an early or late
lint pass trait object. When we run the lint passes, we run the closure and
then invoke the lint pass methods. The lint pass methods take &mut self so
they can keep track of state internally.
Internal lints
These are lints used just by the compiler or drivers like clippy. They can be
found in rustc_lint::internal.
An example of such a lint is the check that lint passes are implemented using
the declare_lint_pass! macro and not by hand. This is accomplished with the
LINT_PASS_IMPL_WITHOUT_MACRO lint.
Registration of these lints happens in the rustc_lint::register_internals
function which is called when constructing a new lint store inside
rustc_lint::new_lint_store.
Builtin Lints
These are primarily described in two places,
rustc_lint_defs::builtin and rustc_lint::builtin.
Often the first provides the definitions for the lints themselves,
and the latter provides the lint pass definitions (and implementations),
but this is not always true.
The builtin lint registration happens in
the rustc_lint::register_builtins function.
Just like with internal lints,
this happens inside of rustc_lint::new_lint_store.
Driver lints
These are the lints provided by drivers via the rustc_interface::Config
register_lints field, which is a callback. Drivers should, if finding it
already set, call the function currently set within the callback they add. The
best way for drivers to get access to this is by overriding the
Callbacks::config function which gives them direct access to the Config
structure.
Compiler lint passes are combined into one pass
Within the compiler, for performance reasons, we usually do not register dozens
of lint passes. Instead, we have a single lint pass of each variety (e.g.,
BuiltinCombinedModuleLateLintPass) which will internally call all of the
individual lint passes; this is because then we get the benefits of static over
dynamic dispatch for each of the (often empty) trait methods.
Ideally, we'd not have to do this, since it adds to the complexity of understanding the code. However, with the current type-erased lint store approach, it is beneficial to do so for performance reasons.
Error codes
We generally try to assign each error message a unique code like E0123. These
codes are defined in the compiler in the diagnostics.rs files found in each
crate, which basically consist of macros. All error codes have an associated
explanation: new error codes must include them. Note that not all historical
(no longer emitted) error codes have explanations.
Error explanations
The explanations are written in Markdown (see the CommonMark Spec for
specifics around syntax), and all of them are linked in the rustc_error_codes
crate. Please read RFC 1567 for details on how to format and write long error
codes. As of February 2023, there is an
effort1 to replace this largely outdated RFC with a new more
flexible standard.
Error explanations should expand on the error message and provide details about why the error occurs. It is not helpful for users to copy-paste a quick fix; explanations should help users understand why their code cannot be accepted by the compiler. Rust prides itself on helpful error messages and long-form explanations are no exception. However, before error explanations are overhauled1 it is a bit open as to how exactly they should be written, as always: ask your reviewer or ask around on the Rust Discord or Zulip.
See the draft RFC here.
Allocating a fresh code
Error codes are stored in compiler/rustc_error_codes.
To create a new error, you first need to find the next available
code. You can find it with tidy:
./x test tidy
This will invoke the tidy script, which generally checks that your code obeys
our coding conventions. Some of these jobs check error codes and ensure that
there aren't duplicates, etc (the tidy check is defined in
src/tools/tidy/src/error_codes.rs). Once it is finished with that, tidy will
print out the highest used error code:
...
tidy check
Found 505 error codes
Highest error code: `E0591`
...
Here we see the highest error code in use is E0591, so we probably want
E0592. To be sure, run rg E0592 and check, you should see no references.
You will have to write an extended description for your error,
which will go in rustc_error_codes/src/error_codes/E0592.md.
To register the error, open rustc_error_codes/src/error_codes.rs and add the
code (in its proper numerical order) into register_diagnostics! macro, like
this:
#![allow(unused)] fn main() { register_diagnostics! { ... E0592: include_str!("./error_codes/E0592.md"), } }
To actually issue the error, you can use the struct_span_code_err! macro:
#![allow(unused)] fn main() { struct_span_code_err!(self.dcx(), // some path to the `DiagCtxt` here span, // whatever span in the source you want E0592, // your new error code fluent::example::an_error_message) .emit() // actually issue the error }
If you want to add notes or other snippets, you can invoke methods before you
call .emit():
#![allow(unused)] fn main() { struct_span_code_err!(...) .span_label(another_span, fluent::example::example_label) .span_note(another_span, fluent::example::separate_note) .emit() }
For an example of a PR adding an error code, see #76143.
Diagnostic Items
While writing lints it's common to check for specific types, traits and
functions. This raises the question on how to check for these. Types can be
checked by their complete type path. However, this requires hard coding paths
and can lead to misclassifications in some edge cases. To counteract this,
rustc has introduced diagnostic items that are used to identify types via
Symbols.
Finding diagnostic items
Diagnostic items are added to items inside rustc/std/core/alloc with the
rustc_diagnostic_item attribute. The item for a specific type can be found by
opening the source code in the documentation and looking for this attribute.
Note that it's often added with the cfg_attr attribute to avoid compilation
errors during tests. A definition often looks like this:
// This is the diagnostic item for this type vvvvvvv
#[cfg_attr(not(test), rustc_diagnostic_item = "Penguin")]
struct Penguin;
Diagnostic items are usually only added to traits, types, and standalone functions. If the goal is to check for an associated type or method, please use the diagnostic item of the item and reference Using Diagnostic Items.
Adding diagnostic items
A new diagnostic item can be added with these two steps:
-
Find the target item inside the Rust repo. Now add the diagnostic item as a string via the
rustc_diagnostic_itemattribute. This can sometimes cause compilation errors while running tests. These errors can be avoided by using thecfg_attrattribute with thenot(test)condition (it's fine adding then for allrustc_diagnostic_itemattributes as a preventive manner). At the end, it should look like this:// This will be the new diagnostic item vvv #[cfg_attr(not(test), rustc_diagnostic_item = "Cat")] struct Cat;For the naming conventions of diagnostic items, please refer to Naming Conventions.
-
Diagnostic items in code are accessed via symbols in
rustc_span::symbol::sym. To add your newly-created diagnostic item, simply open the module file, and add the name (In this caseCat) at the correct point in the list.
Now you can create a pull request with your changes. :tada:
NOTE: When using diagnostic items in other projects like Clippy, it might take some time until the repos get synchronized.
Naming conventions
Diagnostic items don't have a naming convention yet. Following are some guidelines that should be used in future, but might differ from existing names:
- Types, traits, and enums are named using UpperCamelCase
(Examples:
IteratorandHashMap) - For type names that are used multiple times,
like
Writer, it's good to choose a more precise name, maybe by adding the module to it (Example:IoWriter) - Associated items should not get their own diagnostic items, but instead be accessed indirectly by the diagnostic item of the type they're originating from.
- Freestanding functions like
std::mem::swap()should be named usingsnake_casewith one important (export) module as a prefix (Examples:mem_swapandcmp_max) - Modules should usually not have a diagnostic item attached to them. Diagnostic items were added to avoid the usage of paths, and using them on modules would therefore most likely be counterproductive.
Using diagnostic items
In rustc, diagnostic items are looked up via Symbols from inside the
rustc_span::symbol::sym module. These can then be mapped to DefIds
using TyCtxt::get_diagnostic_item() or checked if they match a DefId
using TyCtxt::is_diagnostic_item(). When mapping from a diagnostic item to
a DefId, the method will return a Option<DefId>. This can be None if
either the symbol isn't a diagnostic item or the type is not registered, for
instance when compiling with #[no_std].
All the following examples are based on DefIds and their usage.
Example: Checking for a type
#![allow(unused)] fn main() { use rustc_span::symbol::sym; /// This example checks if the given type (`ty`) has the type `HashMap` using /// `TyCtxt::is_diagnostic_item()` fn example_1(cx: &LateContext<'_>, ty: Ty<'_>) -> bool { match ty.kind() { ty::Adt(adt, _) => cx.tcx.is_diagnostic_item(sym::HashMap, adt.did()), _ => false, } } }
Example: Checking for a trait implementation
#![allow(unused)] fn main() { /// This example checks if a given [`DefId`] from a method is part of a trait /// implementation defined by a diagnostic item. fn is_diag_trait_item( cx: &LateContext<'_>, def_id: DefId, diag_item: Symbol ) -> bool { if let Some(trait_did) = cx.tcx.trait_of_item(def_id) { return cx.tcx.is_diagnostic_item(diag_item, trait_did); } false } }
Associated Types
Associated types of diagnostic items can be accessed indirectly by first
getting the DefId of the trait and then calling
TyCtxt::associated_items(). This returns an AssocItems object which can
be used for further checks. Checkout
clippy_utils::ty::get_iterator_item_ty() for an example usage of this.
Usage in Clippy
Clippy tries to use diagnostic items where possible and has developed some wrapper and utility functions. Please also refer to its documentation when using diagnostic items in Clippy. (See Common tools for writing lints.)
Related issues
These are probably only interesting to people who really want to take a deep dive into the topic :)
- rust#60966: The Rust PR that introduced diagnostic items
- rust-clippy#5393: Clippy's tracking issue for moving away from hard coded paths to diagnostic item
ErrorGuaranteed
The previous sections have been about the error message that a user of the
compiler sees. But emitting an error can also have a second important side
effect within the compiler source code: it generates an
ErrorGuaranteed.
ErrorGuaranteed is a zero-sized type that is unconstructable outside of the
rustc_errors crate. It is generated whenever an error is reported
to the user, so that if your compiler code ever encounters a value of type
ErrorGuaranteed, the compilation is statically guaranteed to fail. This is
useful for avoiding unsoundness bugs because you can statically check that an
error code path leads to a failure.
There are some important considerations about the usage of ErrorGuaranteed:
- It does not convey information about the kind of error. For example, the
error may be due (indirectly) to a delayed bug or other compiler error.
Thus, you should not rely on
ErrorGuaranteedwhen deciding whether to emit an error, or what kind of error to emit. ErrorGuaranteedshould not be used to indicate that a compilation will emit an error in the future. It should be used to indicate that an error has already been emitted -- that is, theemit()function has already been called. For example, if we detect that a future part of the compiler will error, we cannot useErrorGuaranteedunless we first emit an error or delayed bug ourselves.
Thankfully, in most cases, it should be statically impossible to abuse
ErrorGuaranteed.
Please read RFC 3668 to understand the general motivation of the feature. This is a very technical and somewhat "vertical" chapter; ideally we'd split this and sprinkle it across all the relevant chapters, but for the purposes of understanding async closures holistically, I've put this together all here in one chapter.
Coroutine-closures -- a technical deep dive
Coroutine-closures are a generalization of async closures, being special syntax for closure expressions which return a coroutine, notably one that is allowed to capture from the closure's upvars.
For now, the only usable kind of coroutine-closure is the async closure, and supporting async closures is the extent of this PR. We may eventually support gen || {}, etc., and most of the problems and curiosities described in this document apply to all coroutine-closures in general.
As a consequence of the code being somewhat general, this document may flip between calling them "async closures" and "coroutine-closures". The future that is returned by the async closure will generally be called the "coroutine" or the "child coroutine".
HIR
Async closures (and in the future, other coroutine flavors such as gen) are represented in HIR as a hir::Closure whose closure-kind is ClosureKind::CoroutineClosure(_)1, which wraps an async block, which is also represented in HIR as a hir::Closure) and whose closure-kind is ClosureKind::Closure(CoroutineKind::Desugared(_, CoroutineSource::Closure))2.
Like async fn, when lowering an async closure's body, we need to unconditionally move all of the closures arguments into the body so they are captured. This is handled by lower_coroutine_body_with_moved_arguments3. The only notable quirk with this function is that the async block we end up generating as a capture kind of CaptureBy::ByRef4. We later force all of the closure args to be captured by-value5, but we don't want the whole async block to act as if it were an async move, since that would defeat the purpose of the self-borrowing of an async closure.
rustc_middle::ty Representation
For the purposes of keeping the implementation mostly future-compatible (i.e. with gen || {} and async gen || {}), most of this section calls async closures "coroutine-closures".
The main thing that this PR introduces is a new TyKind called CoroutineClosure6 and corresponding variants on other relevant enums in typeck and borrowck (UpvarArgs, DefiningTy, AggregateKind).
We introduce a new TyKind instead of generalizing the existing TyKind::Closure due to major representational differences in the type. The major differences between CoroutineClosures can be explored by first inspecting the CoroutineClosureArgsParts, which is the "unpacked" representation of the coroutine-closure's generics.
Similarities to closures
Like a closure, we have parent_args, a closure_kind_ty, and a tupled_upvars_ty. These represent the same thing as their closure counterparts; namely: the generics inherited from the body that the closure is defined in, the maximum "calling capability" of the closure (i.e. must it be consumed to be called, like FnOnce, or can it be called by-ref), and the captured upvars of the closure itself.
The signature
A traditional closure has a fn_sig_as_fn_ptr_ty which it uses to represent the signature of the closure. In contrast, we store the signature of a coroutine closure in a somewhat "exploded" way, since coroutine-closures have two signatures depending on what AsyncFn* trait you call it with (see below sections).
Conceptually, the coroutine-closure may be thought as containing several different signature types depending on whether it is being called by-ref or by-move.
To conveniently recreate both of these signatures, the signature_parts_ty stores all of the relevant parts of the coroutine returned by this coroutine-closure. This signature parts type will have the general shape of fn(tupled_inputs, resume_ty) -> (return_ty, yield_ty), where resume_ty, return_ty, and yield_ty are the respective types for the coroutine returned by the coroutine-closure7.
The compiler mainly deals with the CoroutineClosureSignature type8, which is created by extracting the relevant types out of the fn() ptr type described above, and which exposes methods that can be used to construct the coroutine that the coroutine-closure ultimately returns.
The data we need to carry along to construct a Coroutine return type
Along with the data stored in the signature, to construct a TyKind::Coroutine to return, we also need to store the "witness" of the coroutine.
So what about the upvars of the Coroutine that is returned? Well, for AsyncFnOnce (i.e. call-by-move), this is simply the same upvars that the coroutine returns. But for AsyncFnMut/AsyncFn, the coroutine that is returned from the coroutine-closure borrows data from the coroutine-closure with a given "environment" lifetime9. This corresponds to the &self lifetime10 on the AsyncFnMut/AsyncFn call signature, and the GAT lifetime of the ByRef11.
Actually getting the coroutine return type(s)
To most easily construct the Coroutine that a coroutine-closure returns, you can use the to_coroutine_given_kind_and_upvars12 helper on CoroutineClosureSignature, which can be acquired from the CoroutineClosureArgs.
Most of the args to that function will be components that you can get out of the CoroutineArgs, except for the goal_kind: ClosureKind which controls which flavor of coroutine to return based off of the ClosureKind passed in -- i.e. it will prepare the by-ref coroutine if ClosureKind::Fn | ClosureKind::FnMut, and the by-move coroutine if ClosureKind::FnOnce.
Trait Hierarchy
We introduce a parallel hierarchy of Fn* traits that are implemented for . The motivation for the introduction was covered in a blog post: Async Closures.
All currently-stable callable types (i.e., closures, function items, function pointers, and dyn Fn* trait objects) automatically implement AsyncFn*() -> T if they implement Fn*() -> Fut for some output type Fut, and Fut implements Future<Output = T>13.
Async closures implement AsyncFn* as their bodies permit; i.e. if they end up using upvars in a way that is compatible (i.e. if they consume or mutate their upvars, it may affect whether they implement AsyncFn and AsyncFnMut...)
Lending
We may in the future move AsyncFn* onto a more general set of LendingFn* traits; however, there are some concrete technical implementation details that limit our ability to use LendingFn ergonomically in the compiler today. These have to do with:
- Closure signature inference.
- Limitations around higher-ranked trait bounds.
- Shortcomings with error messages.
These limitations, plus the fact that the underlying trait should have no effect on the user experience of async closures and async Fn trait bounds, leads us to AsyncFn* for now. To ensure we can eventually move to these more general traits, the precise AsyncFn* trait definitions (including the associated types) are left as an implementation detail.
When do async closures implement the regular Fn* traits?
We mention above that "regular" callable types can implement AsyncFn*, but the reverse question exists of "can async closures implement Fn* too"? The short answer is "when it's valid", i.e. when the coroutine that would have been returned from AsyncFn/AsyncFnMut does not actually have any upvars that are "lent" from the parent coroutine-closure.
See the "follow-up: when do..." section below for an elaborated answer. The full answer describes a pretty interesting and hopefully thorough heuristic that is used to ensure that most async closures "just work".
Tale of two bodies...
When async closures are called with AsyncFn/AsyncFnMut, they return a coroutine that borrows from the closure. However, when they are called via AsyncFnOnce, we consume that closure, and cannot return a coroutine that borrows from data that is now dropped.
To work around around this limitation, we synthesize a separate by-move MIR body for calling AsyncFnOnce::call_once on a coroutine-closure that can be called by-ref.
This body operates identically to the "normal" coroutine returned from calling the coroutine-closure, except for the fact that it has a different set of upvars, since we must move the captures from the parent coroutine-closure into the child coroutine.
Synthesizing the by-move body
When we want to access the by-move body of the coroutine returned by a coroutine-closure, we can do so via the coroutine_by_move_body_def_id14 query.
This query synthesizes a new MIR body by copying the MIR body of the coroutine and inserting additional derefs and field projections15 to preserve the semantics of the body.
Since we've synthesized a new def id, this query is also responsible for feeding a ton of other relevant queries for the MIR body. This query is ensure()d16 during the mir_promoted query, since it operates on the built mir of the coroutine.
Closure signature inference
The closure signature inference algorithm for async closures is a bit more complicated than the inference algorithm for "traditional" closures. Like closures, we iterate through all of the clauses that may be relevant (for the expectation type passed in)17.
To extract a signature, we consider two situations:
- Projection predicates with
AsyncFnOnce::Output, which we will use to extract the inputs and output type for the closure. This corresponds to the situation that there was aF: AsyncFn*() -> Tbound18. - Projection predicates with
FnOnce::Output, which we will use to extract the inputs. For the output, we also try to deduce an output by looking for relevantFuture::Outputprojection predicates. This corresponds to the situation that there was anF: Fn*() -> T, T: Future<Output = U>bound.19- If there is no
Futurebound, we simply use a fresh infer var for the output. This corresponds to the case where one can pass an async closure to a combinator function likeOption::map.20
- If there is no
We support the latter case simply to make it easier for users to simply drop-in async || {} syntax, even when they're calling an API that was designed before first-class AsyncFn* traits were available.
Calling a closure before its kind has been inferred
We defer21 the computation of a coroutine-closure's "kind" (i.e. its maximum calling mode: AsyncFnOnce/AsyncFnMut/AsyncFn) until the end of typeck. However, since we want to be able to call that coroutine-closure before the end of typeck, we need to come up with the return type of the coroutine-closure before that.
Unlike regular closures, whose return type does not change depending on what Fn* trait we call it with, coroutine-closures do end up returning different coroutine types depending on the flavor of AsyncFn* trait used to call it.
Specifically, while the def-id of the returned coroutine does not change, the upvars22 (which are either borrowed or moved from the parent coroutine-closure) and the coroutine-kind23 are dependent on the calling mode.
We introduce a AsyncFnKindHelper trait which allows us to defer the question of "does this coroutine-closure support this calling mode"24 via a trait goal, and "what are the tupled upvars of this calling mode"25 via an associated type, which can be computed by appending the input types of the coroutine-closure to either the upvars or the "by ref" upvars computed during upvar analysis.
Ok, so why?
This seems a bit roundabout and complex, and I admit that it is. But let's think of the "do nothing" alternative -- we could instead mark all AsyncFn* goals as ambiguous until upvar analysis, at which point we would know exactly what to put into the upvars of the coroutine we return. However, this is actually very detrimental to inference in the program, since it means that programs like this would not be valid:
#![allow(unused)] fn main() { let c = async || -> String { .. }; let s = c().await; // ^^^ If we can't project `<{c} as AsyncFn>::call()` to a coroutine, then the `IntoFuture::into_future` call inside of the `.await` stalls, and the type of `s` is left unconstrained as an infer var. s.as_bytes(); // ^^^ That means we can't call any methods on the awaited return of a coroutine-closure, like... at all! }
So instead, we use this alias (in this case, a projection: AsyncFnKindHelper::Upvars<'env, ...>) to delay the computation of the tupled upvars and give us something to put in its place, while still allowing us to return a TyKind::Coroutine (which is a rigid type) and we may successfully confirm the built-in traits we need (in our case, Future), since the Future implementation doesn't depend on the upvars at all.
Upvar analysis
By and large, the upvar analysis for coroutine-closures and their child coroutines proceeds like normal upvar analysis. However, there are several interesting bits that happen to account for async closures' special natures:
Forcing all inputs to be captured
Like async fn, all input arguments are captured. We explicitly force26 all of these inputs to be captured by move so that the future coroutine returned by async closures does not depend on whether the input is used by the body or not, which would impart an interesting semver hazard.
Computing the by-ref captures
For a coroutine-closure that supports AsyncFn/AsyncFnMut, we must also compute the relationship between the captures of the coroutine-closure and its child coroutine. Specifically, the coroutine-closure may move a upvar into its captures, but the coroutine may only borrow that upvar.
We compute the "coroutine_captures_by_ref_ty" by looking at all of the child coroutine's captures and comparing them to the corresponding capture of the parent coroutine-closure27. This coroutine_captures_by_ref_ty ends up being represented as a for<'env> fn() -> captures... type, with the additional binder lifetime representing the "&self" lifetime of calling AsyncFn::async_call or AsyncFnMut::async_call_mut. We instantiate that binder later when actually calling the methods.
Note that not every by-ref capture from the parent coroutine-closure results in a "lending" borrow. See the Follow-up: When do async closures implement the regular Fn* traits? section below for more details, since this intimately influences whether or not the coroutine-closure is allowed to implement the Fn* family of traits.
By-move body + FnOnce quirk
There are several situations where the closure upvar analysis ends up inferring upvars for the coroutine-closure's child coroutine that are too relaxed, and end up resulting in borrow-checker errors. This is best illustrated via examples. For example, given:
#![allow(unused)] fn main() { fn force_fnonce<T: async FnOnce()>(t: T) -> T { t } let x = String::new(); let c = force_fnonce(async move || { println!("{x}"); }); }
x will be moved into the coroutine-closure, but the coroutine that is returned would only borrow &x. However, since force_fnonce forces the coroutine-closure to AsyncFnOnce, which is not lending, we must force the capture to happen by-move28.
Similarly:
#![allow(unused)] fn main() { let x = String::new(); let y = String::new(); let c = async move || { drop(y); println!("{x}"); }; }
x will be moved into the coroutine-closure, but the coroutine that is returned would only borrow &x. However, since we also capture y and drop it, the coroutine-closure is forced to be AsyncFnOnce. We must also force the capture of x to happen by-move. To determine this situation in particular, since unlike the last example the coroutine-kind's closure-kind has not yet been constrained, we must analyze the body of the coroutine-closure to see if how all of the upvars are used, to determine if they've been used in a way that is "consuming" -- i.e. that would force it to FnOnce29.
Follow-up: When do async closures implement the regular Fn* traits?
Well, first of all, all async closures implement FnOnce since they can always be called at least once.
For Fn/FnMut, the detailed answer involves answering a related question: is the coroutine-closure lending? Because if it is, then it cannot implement the non-lending Fn/FnMut traits.
Determining when the coroutine-closure must lend its upvars is implemented in the should_reborrow_from_env_of_parent_coroutine_closure helper function30. Specifically, this needs to happen in two places:
- Are we borrowing data owned by the parent closure? We can determine if that is the case by checking if the parent capture is by-move, EXCEPT if we apply a deref projection, which means we're reborrowing a reference that we captured by-move.
#![allow(unused)] fn main() { let x = &1i32; // Let's call this lifetime `'1`. let c = async move || { println!("{:?}", *x); // Even though the inner coroutine borrows by ref, we're only capturing `*x`, // not `x`, so the inner closure is allowed to reborrow the data for `'1`. }; }
- If a coroutine is mutably borrowing from a parent capture, then that mutable borrow cannot live for longer than either the parent or the borrow that we have on the original upvar. Therefore we always need to borrow the child capture with the lifetime of the parent coroutine-closure's env.
#![allow(unused)] fn main() { let mut x = 1i32; let c = async || { x = 1; // The parent borrows `x` for some `&'1 mut i32`. // However, when we call `c()`, we implicitly autoref for the signature of // `AsyncFnMut::async_call_mut`. Let's call that lifetime `'call`. Since // the maximum that `&'call mut &'1 mut i32` can be reborrowed is `&'call mut i32`, // the inner coroutine should capture w/ the lifetime of the coroutine-closure. }; }
If either of these cases apply, then we should capture the borrow with the lifetime of the parent coroutine-closure's env. Luckily, if this function is not correct, then the program is not unsound, since we still borrowck and validate the choices made from this function -- the only side-effect is that the user may receive unnecessary borrowck errors.
Instance resolution
If a coroutine-closure has a closure-kind of FnOnce, then its AsyncFnOnce::call_once and FnOnce::call_once implementations resolve to the coroutine-closure's body31, and the Future::poll of the coroutine that gets returned resolves to the body of the child closure.
If a coroutine-closure has a closure-kind of FnMut/Fn, then the same applies to AsyncFn and the corresponding Future implementation of the coroutine that gets returned.31 However, we use a MIR shim to generate the implementation of AsyncFnOnce::call_once/FnOnce::call_once32, and Fn::call/FnMut::call_mut instances if they exist33.
This is represented by the ConstructCoroutineInClosureShim34. The receiver_by_ref bool will be true if this is the instance of Fn::call/FnMut::call_mut.35 The coroutine that all of these instances returns corresponds to the by-move body we will have synthesized by this point.36
Borrow-checking
It turns out that borrow-checking async closures is pretty straightforward. After adding a new DefiningTy::CoroutineClosure37 variant, and teaching borrowck how to generate the signature of the coroutine-closure38, borrowck proceeds totally fine.
One thing to note is that we don't borrow-check the synthetic body we make for by-move coroutines, since by construction (and the validity of the by-ref coroutine body it was derived from) it must be valid.
From MIR to Binaries
All of the preceding chapters of this guide have one thing in common: we never generated any executable machine code at all! With this chapter, all of that changes.
So far, we've shown how the compiler can take raw source code in text format and transform it into MIR. We have also shown how the compiler does various analyses on the code to detect things like type or lifetime errors. Now, we will finally take the MIR and produce some executable machine code.
NOTE: This part of a compiler is often called the backend. The term is a bit overloaded because in the compiler source, it usually refers to the "codegen backend" (i.e. LLVM, Cranelift, or GCC). Usually, when you see the word "backend" in this part, we are referring to the "codegen backend".
So what do we need to do?
- First, we need to collect the set of things to generate code for. In particular, we need to find out which concrete types to substitute for generic ones, since we need to generate code for the concrete types. Generating code for the concrete types (i.e. emitting a copy of the code for each concrete type) is called monomorphization, so the process of collecting all the concrete types is called monomorphization collection.
- Next, we need to actually lower the MIR to a codegen IR (usually LLVM IR) for each concrete type we collected.
- Finally, we need to invoke the codegen backend, which runs a bunch of optimization passes, generates executable code, and links together an executable binary.
The code for codegen is actually a bit complex due to a few factors:
- Support for multiple codegen backends (LLVM, Cranelift, and GCC). We try to share as much backend code between them as possible, so a lot of it is generic over the codegen implementation. This means that there are often a lot of layers of abstraction.
- Codegen happens asynchronously in another thread for performance.
- The actual codegen is done by a third-party library (either of the 3 backends).
Generally, the rustc_codegen_ssa crate contains backend-agnostic code,
while the rustc_codegen_llvm crate contains code specific to LLVM codegen.
At a very high level, the entry point is
rustc_codegen_ssa::base::codegen_crate.
This function starts the process discussed in the rest of this chapter.
MIR optimizations
MIR optimizations are optimizations run on the MIR to produce better MIR before codegen. This is important for two reasons: first, it makes the final generated executable code better, and second, it means that LLVM has less work to do, so compilation is faster. Note that since MIR is generic (not monomorphized yet), these optimizations are particularly effective; we can optimize the generic version, so all of the monomorphizations are cheaper!
MIR optimizations run after borrow checking. We run a series of optimization
passes over the MIR to improve it. Some passes are required to run on all code,
some passes don't actually do optimizations but only check stuff, and some
passes are only turned on in release mode.
The optimized_mir query is called to produce the optimized MIR
for a given DefId. This query makes sure that the borrow checker has
run and that some validation has occurred. Then, it steals the MIR,
optimizes it, and returns the improved MIR.
Quickstart for adding a new optimization
-
Make a Rust source file in
tests/mir-optthat shows the code you want to optimize. This should be kept simple, so avoidprintln!or other formatting code if it's not necessary for the optimization. The reason for this is thatprintln!,format!, etc. generate a lot of MIR that can make it harder to understand what the optimization does to the test. -
Run
./x test --bless tests/mir-opt/<your-test>.rsto generate a MIR dump. Read this README for instructions on how to dump things. -
Commit the current working directory state. The reason you should commit the test output before you implement the optimization is so that you (and your reviewers) can see a before/after diff of what the optimization changed.
-
Implement a new optimization in
compiler/rustc_mir_transform/src. The fastest and easiest way to do this is to- pick a small optimization (such as
remove_storage_markers) and copy it to a new file, - add your optimization to one of the lists in the
run_optimization_passes()function, - and then start modifying the copied optimization.
- pick a small optimization (such as
-
Rerun
./x test --bless tests/mir-opt/<your-test>.rsto regenerate the MIR dumps. Look at the diffs to see if they are what you expect. -
Run
./x test tests/uito see if your optimization broke anything. -
If there are issues with your optimization, experiment with it a bit and repeat steps 5 and 6.
-
Commit and open a PR. You can do this at any point, even if things aren't working yet, so that you can ask for feedback on the PR. Open a "WIP" PR (just prefix your PR title with
[WIP]or otherwise note that it is a work in progress) in that case.Make sure to commit the blessed test output as well! It's necessary for CI to pass and it's very helpful to reviewers.
If you have any questions along the way, feel free to ask in
#t-compiler/wg-mir-opt on Zulip.
Defining optimization passes
The list of passes run and the order in which they are run is defined by the
run_optimization_passes function. It contains an array of passes to
run. Each pass in the array is a struct that implements the MirPass trait.
The array is an array of &dyn MirPass trait objects. Typically, a pass is
implemented in its own module of the rustc_mir_transform crate.
Some examples of passes are:
CleanupPostBorrowck: Remove some of the info that is only needed for analyses, rather than codegen.ConstProp: Does constant propagation.
You can see the "Implementors" section of the MirPass rustdocs for more examples.
MIR optimization levels
MIR optimizations can come in various levels of readiness. Experimental
optimizations may cause miscompilations, or slow down compile times.
These passes are still included in nightly builds to gather feedback and make it easier to modify
the pass. To enable working with slow or otherwise experimental optimization passes,
you can specify the -Z mir-opt-level debug flag. You can find the
definitions of the levels in the compiler MCP. If you are developing a MIR pass and
want to query whether your optimization pass should run, you can check the
current level using tcx.sess.opts.unstable_opts.mir_opt_level.
Optimization fuel
Optimization fuel is a compiler option (-Z fuel=<crate>=<value>) that allows for fine grained
control over which optimizations can be applied during compilation: each optimization reduces
fuel by 1, and when fuel reaches 0 no more optimizations are applied. The primary use of fuel
is debugging optimizations that may be incorrect or misapplied. By changing the fuel
value, you can bisect a compilation session down to the exact incorrect optimization
(this behaves like a kind of binary search through the optimizations).
MIR optimizations respect fuel, and in general each pass should check fuel by calling
tcx.consider_optimizing and skipping the optimization if fuel
is empty. There are a few considerations:
- If the pass is considered "guaranteed" (for example, it should always be run because it is
needed for correctness), then fuel should not be used. An example of this is
PromoteTemps. - In some cases, an initial pass is performed to gather candidates, which are then iterated to
perform optimizations. In these situations, we should allow for the initial gathering pass
and then check fuel as close to the mutation as possible. This allows for the best
debugging experience, because we can determine where in the list of candidates an optimization
may have been misapplied. Examples of this are
InstSimplifyandConstantPropagation.
MIR Debugging
The -Z dump-mir flag can be used to dump a text representation of the MIR.
The following optional flags, used in combination with -Z dump-mir, enable
additional output formats, including:
-Z dump-mir-graphviz- dumps a.dotfile that represents MIR as a control-flow graph-Z dump-mir-dataflow- dumps a.dotfile showing the dataflow state at each point in the control-flow graph
-Z dump-mir=F is a handy compiler option that will let you view the MIR for
each function at each stage of compilation. -Z dump-mir takes a filter F
which allows you to control which functions and which passes you are
interested in. For example:
> rustc -Z dump-mir=foo ...
This will dump the MIR for any function whose name contains foo; it
will dump the MIR both before and after every pass. Those files will
be created in the mir_dump directory. There will likely be quite a
lot of them!
> cat > foo.rs
fn main() {
println!("Hello, world!");
}
^D
> rustc -Z dump-mir=main foo.rs
> ls mir_dump/* | wc -l
161
The files have names like rustc.main.000-000.CleanEndRegions.after.mir. These
names have a number of parts:
rustc.main.000-000.CleanEndRegions.after.mir
---- --- --- --------------- ----- either before or after
| | | name of the pass
| | index of dump within the pass (usually 0, but some passes dump intermediate states)
| index of the pass
def-path to the function etc being dumped
You can also make more selective filters. For example, main & CleanEndRegions
will select for things that reference both main and the pass
CleanEndRegions:
> rustc -Z dump-mir='main & CleanEndRegions' foo.rs
> ls mir_dump
rustc.main.000-000.CleanEndRegions.after.mir rustc.main.000-000.CleanEndRegions.before.mir
Filters can also have | parts to combine multiple sets of
&-filters. For example main & CleanEndRegions | main & NoLandingPads will select either main and CleanEndRegions or
main and NoLandingPads:
> rustc -Z dump-mir='main & CleanEndRegions | main & NoLandingPads' foo.rs
> ls mir_dump
rustc.main-promoted[0].002-000.NoLandingPads.after.mir
rustc.main-promoted[0].002-000.NoLandingPads.before.mir
rustc.main-promoted[0].002-006.NoLandingPads.after.mir
rustc.main-promoted[0].002-006.NoLandingPads.before.mir
rustc.main-promoted[1].002-000.NoLandingPads.after.mir
rustc.main-promoted[1].002-000.NoLandingPads.before.mir
rustc.main-promoted[1].002-006.NoLandingPads.after.mir
rustc.main-promoted[1].002-006.NoLandingPads.before.mir
rustc.main.000-000.CleanEndRegions.after.mir
rustc.main.000-000.CleanEndRegions.before.mir
rustc.main.002-000.NoLandingPads.after.mir
rustc.main.002-000.NoLandingPads.before.mir
rustc.main.002-006.NoLandingPads.after.mir
rustc.main.002-006.NoLandingPads.before.mir
(Here, the main-promoted[0] files refer to the MIR for "promoted constants"
that appeared within the main function.)
The -Z unpretty=mir-cfg flag can be used to create a graphviz MIR
control-flow diagram for the whole crate:

TODO: anything else?
Constant Evaluation
Constant evaluation is the process of computing values at compile time. For a specific item (constant/static/array length) this happens after the MIR for the item is borrow-checked and optimized. In many cases trying to const evaluate an item will trigger the computation of its MIR for the first time.
Prominent examples are:
- The initializer of a
static - Array length
- needs to be known to reserve stack or heap space
- Enum variant discriminants
- needs to be known to prevent two variants from having the same discriminant
- Patterns
- need to be known to check for overlapping patterns
Additionally constant evaluation can be used to reduce the workload or binary size at runtime by precomputing complex operations at compiletime and only storing the result.
All uses of constant evaluation can either be categorized as "influencing the type system" (array lengths, enum variant discriminants, const generic parameters), or as solely being done to precompute expressions to be used at runtime.
Constant evaluation can be done by calling the const_eval_* functions of TyCtxt.
They're the wrappers of the const_eval query.
const_eval_global_id_for_typeckevaluates a constant to a valtree, so the result value can be further inspected by the compiler.const_eval_global_idevaluate a constant to an "opaque blob" containing its final value; this is only useful for codegen backends and the CTFE evaluator engine itself.eval_static_initializerspecifically computes the initial values of a static. Statics are special; all other functions do not represent statics correctly and have thus assertions preventing their use on statics.
The const_eval_* functions use a ParamEnv of environment
in which the constant is evaluated (e.g. the function within which the constant is used)
and a GlobalId. The GlobalId is made up of an Instance referring to a constant
or static or of an Instance of a function and an index into the function's Promoted table.
Constant evaluation returns an EvalToValTreeResult for type system constants
or EvalToConstValueResult with either the error, or a representation of the
evaluated constant: a valtree or a MIR constant
value, respectively.
Interpreter
The interpreter is a virtual machine for executing MIR without compiling to
machine code. It is usually invoked via tcx.const_eval_* functions. The
interpreter is shared between the compiler (for compile-time function
evaluation, CTFE) and the tool Miri, which
uses the same virtual machine to detect Undefined Behavior in (unsafe) Rust
code.
If you start out with a constant:
#![allow(unused)] fn main() { const FOO: usize = 1 << 12; }
rustc doesn't actually invoke anything until the constant is either used or placed into metadata.
Once you have a use-site like:
type Foo = [u8; FOO - 42];
The compiler needs to figure out the length of the array before being able to create items that use the type (locals, constants, function arguments, ...).
To obtain the (in this case empty) parameter environment, one can call
let param_env = tcx.param_env(length_def_id);. The GlobalId needed is
let gid = GlobalId {
promoted: None,
instance: Instance::mono(length_def_id),
};
Invoking tcx.const_eval(param_env.and(gid)) will now trigger the creation of
the MIR of the array length expression. The MIR will look something like this:
Foo::{{constant}}#0: usize = {
let mut _0: usize;
let mut _1: (usize, bool);
bb0: {
_1 = CheckedSub(const FOO, const 42usize);
assert(!move (_1.1: bool), "attempt to subtract with overflow") -> bb1;
}
bb1: {
_0 = move (_1.0: usize);
return;
}
}
Before the evaluation, a virtual memory location (in this case essentially a
vec![u8; 4] or vec![u8; 8]) is created for storing the evaluation result.
At the start of the evaluation, _0 and _1 are
Operand::Immediate(Immediate::Scalar(ScalarMaybeUndef::Undef)). This is quite
a mouthful: Operand can represent either data stored somewhere in the
interpreter memory (Operand::Indirect), or (as an optimization)
immediate data stored in-line. And Immediate can either be a single
(potentially uninitialized) scalar value (integer or thin pointer),
or a pair of two of them. In our case, the single scalar value is not (yet)
initialized.
When the initialization of _1 is invoked, the value of the FOO constant is
required, and triggers another call to tcx.const_eval_*, which will not be shown
here. If the evaluation of FOO is successful, 42 will be subtracted from its
value 4096 and the result stored in _1 as
Operand::Immediate(Immediate::ScalarPair(Scalar::Raw { data: 4054, .. }, Scalar::Raw { data: 0, .. }). The first part of the pair is the computed value,
the second part is a bool that's true if an overflow happened. A Scalar::Raw
also stores the size (in bytes) of this scalar value; we are eliding that here.
The next statement asserts that said boolean is 0. In case the assertion
fails, its error message is used for reporting a compile-time error.
Since it does not fail, Operand::Immediate(Immediate::Scalar(Scalar::Raw { data: 4054, .. })) is stored in the virtual memory it was allocated before the
evaluation. _0 always refers to that location directly.
After the evaluation is done, the return value is converted from Operand to
ConstValue by op_to_const: the former representation is geared towards
what is needed during const evaluation, while ConstValue is shaped by the
needs of the remaining parts of the compiler that consume the results of const
evaluation. As part of this conversion, for types with scalar values, even if
the resulting Operand is Indirect, it will return an immediate
ConstValue::Scalar(computed_value) (instead of the usual ConstValue::ByRef).
This makes using the result much more efficient and also more convenient, as no
further queries need to be executed in order to get at something as simple as a
usize.
Future evaluations of the same constants will not actually invoke the interpreter, but just use the cached result.
Datastructures
The interpreter's outside-facing datastructures can be found in
rustc_middle/src/mir/interpret.
This is mainly the error enum and the ConstValue and Scalar types. A
ConstValue can be either Scalar (a single Scalar, i.e., integer or thin
pointer), Slice (to represent byte slices and strings, as needed for pattern
matching) or ByRef, which is used for anything else and refers to a virtual
allocation. These allocations can be accessed via the methods on
tcx.interpret_interner. A Scalar is either some Raw integer or a pointer;
see the next section for more on that.
If you are expecting a numeric result, you can use eval_usize (panics on
anything that can't be represented as a u64) or try_eval_usize which results
in an Option<u64> yielding the Scalar if possible.
Memory
To support any kind of pointers, the interpreter needs to have a "virtual memory" that the
pointers can point to. This is implemented in the Memory type. In the
simplest model, every global variable, stack variable and every dynamic
allocation corresponds to an Allocation in that memory. (Actually using an
allocation for every MIR stack variable would be very inefficient; that's why we
have Operand::Immediate for stack variables that are both small and never have
their address taken. But that is purely an optimization.)
Such an Allocation is basically just a sequence of u8 storing the value of
each byte in this allocation. (Plus some extra data, see below.) Every
Allocation has a globally unique AllocId assigned in Memory. With that, a
Pointer consists of a pair of an AllocId (indicating the allocation) and
an offset into the allocation (indicating which byte of the allocation the
pointer points to). It may seem odd that a Pointer is not just an integer
address, but remember that during const evaluation, we cannot know at which
actual integer address the allocation will end up -- so we use AllocId as
symbolic base addresses, which means we need a separate offset. (As an aside,
it turns out that pointers at run-time are
more than just integers, too.)
These allocations exist so that references and raw pointers have something to
point to. There is no global linear heap in which things are allocated, but each
allocation (be it for a local variable, a static or a (future) heap allocation)
gets its own little memory with exactly the required size. So if you have a
pointer to an allocation for a local variable a, there is no possible (no
matter how unsafe) operation that you can do that would ever change said pointer
to a pointer to a different local variable b.
Pointer arithmetic on a will only ever change its offset; the AllocId stays the same.
This, however, causes a problem when we want to store a Pointer into an
Allocation: we cannot turn it into a sequence of u8 of the right length!
AllocId and offset together are twice as big as a pointer "seems" to be. This
is what the relocation field of Allocation is for: the byte offset of the
Pointer gets stored as a bunch of u8, while its AllocId gets stored
out-of-band. The two are reassembled when the Pointer is read from memory.
The other bit of extra data an Allocation needs is undef_mask for keeping
track of which of its bytes are initialized.
Global memory and exotic allocations
Memory exists only during evaluation; it gets destroyed when the
final value of the constant is computed. In case that constant contains any
pointers, those get "interned" and moved to a global "const eval memory" that is
part of TyCtxt. These allocations stay around for the remaining computation
and get serialized into the final output (so that dependent crates can use
them).
Moreover, to also support function pointers, the global memory in TyCtxt can
also contain "virtual allocations": instead of an Allocation, these contain an
Instance. That allows a Pointer to point to either normal data or a
function, which is needed to be able to evaluate casts from function pointers to
raw pointers.
Finally, the GlobalAlloc type used in the global memory also contains a
variant Static that points to a particular const or static item. This is
needed to support circular statics, where we need to have a Pointer to a
static for which we cannot yet have an Allocation as we do not know the
bytes of its value.
Pointer values vs Pointer types
One common cause of confusion in the interpreter is that being a pointer value and having
a pointer type are entirely independent properties. By "pointer value", we
refer to a Scalar::Ptr containing a Pointer and thus pointing somewhere into
the interpreter's virtual memory. This is in contrast to Scalar::Raw, which is just some
concrete integer.
However, a variable of pointer or reference type, such as *const T or &T,
does not have to have a pointer value: it could be obtained by casting or
transmuting an integer to a pointer.
And similarly, when casting or transmuting a reference to some
actual allocation to an integer, we end up with a pointer value
(Scalar::Ptr) at integer type (usize). This is a problem because we
cannot meaningfully perform integer operations such as division on pointer
values.
Interpretation
Although the main entry point to constant evaluation is the tcx.const_eval_*
functions, there are additional functions in
rustc_const_eval/src/const_eval
that allow accessing the fields of a ConstValue (ByRef or otherwise). You should
never have to access an Allocation directly except for translating it to the
compilation target (at the moment just LLVM).
The interpreter starts by creating a virtual stack frame for the current constant that is being evaluated. There's essentially no difference between a constant and a function with no arguments, except that constants do not allow local (named) variables at the time of writing this guide.
A stack frame is defined by the Frame type in
rustc_const_eval/src/interpret/eval_context.rs
and contains all the local
variables memory (None at the start of evaluation). Each frame refers to the
evaluation of either the root constant or subsequent calls to const fn. The
evaluation of another constant simply calls tcx.const_eval_*, which produce an
entirely new and independent stack frame.
The frames are just a Vec<Frame>, there's no way to actually refer to a
Frame's memory even if horrible shenanigans are done via unsafe code. The only
memory that can be referred to are Allocations.
The interpreter now calls the step method (in
rustc_const_eval/src/interpret/step.rs
) until it either returns an error or has no further statements to execute. Each
statement will now initialize or modify the locals or the virtual memory
referred to by a local. This might require evaluating other constants or
statics, which just recursively invokes tcx.const_eval_*.
Monomorphization
As you probably know, Rust has a very expressive type system that has extensive support for generic types. But of course, assembly is not generic, so we need to figure out the concrete types of all the generics before the code can execute.
Different languages handle this problem differently. For example, in some languages, such as Java, we may not know the most precise type of value until runtime. In the case of Java, this is ok because (almost) all variables are reference values anyway (i.e. pointers to a heap allocated object). This flexibility comes at the cost of performance, since all accesses to an object must dereference a pointer.
Rust takes a different approach: it monomorphizes all generic types. This
means that compiler stamps out a different copy of the code of a generic
function for each concrete type needed. For example, if I use a Vec<u64> and
a Vec<String> in my code, then the generated binary will have two copies of
the generated code for Vec: one for Vec<u64> and another for Vec<String>.
The result is fast programs, but it comes at the cost of compile time (creating
all those copies can take a while) and binary size (all those copies might take
a lot of space).
Monomorphization is the first step in the backend of the Rust compiler.
Collection
First, we need to figure out what concrete types we need for all the generic things in our program. This is called collection, and the code that does this is called the monomorphization collector.
Take this example:
fn banana() { peach::<u64>(); } fn main() { banana(); }
The monomorphization collector will give you a list of [main, banana, peach::<u64>]. These are the functions that will have machine code generated
for them. Collector will also add things like statics to that list.
See the collector rustdocs for more info.
The monomorphization collector is run just before MIR lowering and codegen.
rustc_codegen_ssa::base::codegen_crate calls the
collect_and_partition_mono_items query, which does monomorphization
collection and then partitions them into codegen
units.
Codegen Unit (CGU) partitioning
For better incremental build times, the CGU partitioner creates two CGU for each source level modules. One is for "stable" i.e. non-generic code and the other is more volatile code i.e. monomorphized/specialized instances.
For dependencies, consider Crate A and Crate B, such that Crate B depends on Crate A. The following table lists different scenarios for a function in Crate A that might be used by one or more modules in Crate B.
| Crate A function | Behavior |
|---|---|
| Non-generic function | Crate A function doesn't appear in any codegen units of Crate B |
Non-generic #[inline] function | Crate A function appears within a single CGU of Crate B, and exists even after post-inlining stage |
| Generic function | Regardless of inlining, all monomorphized (specialized) functions from Crate A appear within a single codegen unit for Crate B. The codegen unit exists even after the post inlining stage. |
Generic #[inline] function | - same - |
For more details about the partitioner read the module level documentation.
Polymorphization
As mentioned above, monomorphization produces fast code, but it comes at the cost of compile time and binary size. MIR optimizations can help a bit with this.
In addition to MIR optimizations, rustc attempts to determine when fewer
copies of functions are necessary and avoid making those copies - known
as "polymorphization". When a function-like item is found during
monomorphization collection, the
rustc_mir_monomorphize::polymorphize::unused_generic_params
query is invoked, which traverses the MIR of the item to determine on which
generic parameters the item might not need duplicated.
Currently, polymorphization only looks for unused generic parameters. These are relatively rare in functions, but closures inherit the generic parameters of their parent function and it is common for closures to not use those inherited parameters. Without polymorphization, a copy of these closures would be created for each copy of the parent function. By creating fewer copies, less LLVM IR is generated; therefore less needs to be processed.
unused_generic_params returns a FiniteBitSet<u64> where a bit is set if
the generic parameter of the corresponding index is unused. Any parameters
after the first sixty-four are considered used.
The results of polymorphization analysis are used in the
Instance::polymorphize function to replace the
Instance's substitutions for the unused generic parameters with their
identity substitutions.
Consider the example below:
fn foo<A, B>() { let x: Option<B> = None; } fn main() { foo::<u16, u32>(); foo::<u64, u32>(); }
During monomorphization collection, foo will be collected with the
substitutions [u16, u32] and [u64, u32] (from its invocations in main).
foo has the identity substitutions [A, B] (or
[ty::Param(0), ty::Param(1)]).
Polymorphization will identify A as being unused and it will be replaced in
the substitutions with the identity parameter before being added to the set
of collected items - thereby reducing the copies from two ([u16, u32] and
[u64, u32]) to one ([A, u32]).
unused_generic_params will also be invoked during code generation when the
symbol name for foo is being computed for use in the callsites of foo
(which have the regular substitutions present, otherwise there would be a
symbol mismatch between the caller and the function).
As a result of polymorphization, items collected during monomorphization cannot be assumed to be monomorphic.
It is intended that polymorphization be extended to more advanced cases, such as where only the size/alignment of a generic parameter are required.
More details on polymorphization are available in the master's thesis associated with polymorphization's initial implementation.
Lowering MIR to a Codegen IR
Now that we have a list of symbols to generate from the collector, we need to generate some sort of codegen IR. In this chapter, we will assume LLVM IR, since that's what rustc usually uses. The actual monomorphization is performed as we go, while we do the translation.
Recall that the backend is started by
rustc_codegen_ssa::base::codegen_crate. Eventually, this reaches
rustc_codegen_ssa::mir::codegen_mir, which does the lowering from
MIR to LLVM IR.
The code is split into modules which handle particular MIR primitives:
rustc_codegen_ssa::mir::blockwill deal with translating blocks and their terminators. The most complicated and also the most interesting thing this module does is generating code for function calls, including the necessary unwinding handling IR.rustc_codegen_ssa::mir::statementtranslates MIR statements.rustc_codegen_ssa::mir::operandtranslates MIR operands.rustc_codegen_ssa::mir::placetranslates MIR place references.rustc_codegen_ssa::mir::rvaluetranslates MIR r-values.
Before a function is translated a number of simple and primitive analysis
passes will run to help us generate simpler and more efficient LLVM IR. An
example of such an analysis pass would be figuring out which variables are
SSA-like, so that we can translate them to SSA directly rather than relying on
LLVM's mem2reg for those variables. The analysis can be found in
rustc_codegen_ssa::mir::analyze.
Usually a single MIR basic block will map to a LLVM basic block, with very few
exceptions: intrinsic or function calls and less basic MIR statements like
assert can result in multiple basic blocks. This is a perfect lede into the
non-portable LLVM-specific part of the code generation. Intrinsic generation is
fairly easy to understand as it involves very few abstraction levels in between
and can be found in rustc_codegen_llvm::intrinsic.
Everything else will use the builder interface. This is the code that gets
called in the rustc_codegen_ssa::mir::* modules discussed above.
TODO: discuss how constants are generated
Code generation
Code generation (or "codegen") is the part of the compiler
that actually generates an executable binary.
Usually, rustc uses LLVM for code generation,
but there is also support for Cranelift and GCC.
The key is that rustc doesn't implement codegen itself.
It's worth noting, though, that in the Rust source code,
many parts of the backend have codegen in their names
(there are no hard boundaries).
NOTE: If you are looking for hints on how to debug code generation bugs, please see this section of the debugging chapter.
What is LLVM?
LLVM is "a collection of modular and reusable compiler and
toolchain technologies". In particular, the LLVM project contains a pluggable
compiler backend (also called "LLVM"), which is used by many compiler projects,
including the clang C compiler and our beloved rustc.
LLVM takes input in the form of LLVM IR. It is basically assembly code with additional low-level types and annotations added. These annotations are helpful for doing optimizations on the LLVM IR and outputted machine code. The end result of all this is (at long last) something executable (e.g. an ELF object, an EXE, or wasm).
There are a few benefits to using LLVM:
- We don't have to write a whole compiler backend. This reduces implementation and maintenance burden.
- We benefit from the large suite of advanced optimizations that the LLVM project has been collecting.
- We can automatically compile Rust to any of the platforms for which LLVM has support. For example, as soon as LLVM added support for wasm, voila! rustc, clang, and a bunch of other languages were able to compile to wasm! (Well, there was some extra stuff to be done, but we were 90% there anyway).
- We and other compiler projects benefit from each other. For example, when the Spectre and Meltdown security vulnerabilities were discovered, only LLVM needed to be patched.
Running LLVM, linking, and metadata generation
Once LLVM IR for all of the functions and statics, etc is built, it is time to start running LLVM and its optimization passes. LLVM IR is grouped into "modules". Multiple "modules" can be codegened at the same time to aid in multi-core utilization. These "modules" are what we refer to as codegen units. These units were established way back during monomorphization collection phase.
Once LLVM produces objects from these modules, these objects are passed to the linker along with, optionally, the metadata object and an archive or an executable is produced.
It is not necessarily the codegen phase described above that runs the optimizations. With certain kinds of LTO, the optimization might happen at the linking time instead. It is also possible for some optimizations to happen before objects are passed on to the linker and some to happen during the linking.
This all happens towards the very end of compilation. The code for this can be
found in rustc_codegen_ssa::back and
rustc_codegen_llvm::back. Sadly, this piece of code is not
really well-separated into LLVM-dependent code; the rustc_codegen_ssa
contains a fair amount of code specific to the LLVM backend.
Once these components are done with their work you end up with a number of files in your filesystem corresponding to the outputs you have requested.
Updating LLVM
Rust supports building against multiple LLVM versions:
- Tip-of-tree for the current LLVM development branch is usually supported
within a few days. PRs for such fixes are tagged with
llvm-main. - The latest released major version is always supported.
- The one or two preceding major versions are usually supported.
By default, Rust uses its own fork in the rust-lang/llvm-project repository.
This fork is based on a release/$N.x branch of the upstream project, where
$N is either the latest released major version, or the current major version
in release candidate phase. The fork is never based on the main development
branch.
Our LLVM fork only accepts:
- Backports of changes that have already landed upstream.
- Workarounds for build issues affecting our CI environment.
With the exception of one grandfathered-in patch for SGX enablement, we do not accept functional patches that have not been upstreamed first.
There are three types of LLVM updates, with different procedures:
- Backports while the current major LLVM version is supported.
- Backports while the current major LLVM version is no longer supported (or the change is not eligible for upstream backport).
- Update to a new major LLVM version.
Backports (upstream supported)
While the current major LLVM version is supported upstream, fixes should be backported upstream first, and the release branch then merged back into the Rust fork.
- Make sure the bugfix is in upstream LLVM.
- If this hasn't happened already, request a backport to the upstream release branch. If you have LLVM commit access, follow the backport process. Otherwise, open an issue requesting the backport. Continue once the backport has been approved and merged.
- Identify the branch that rustc is currently using. The
src/llvm-projectsubmodule is always pinned to a branch of the rust-lang/llvm-project repository. - Fork the rust-lang/llvm-project repository.
- Check out the appropriate branch (typically named
rustc/a.b-yyyy-mm-dd). - Add a remote for the upstream repository using
git remote add upstream https://github.com/llvm/llvm-project.gitand fetch it usinggit fetch upstream. - Merge the
upstream/release/$N.xbranch. - Push this branch to your fork.
- Send a Pull Request to rust-lang/llvm-project to the same branch as before. Be sure to reference the Rust and/or LLVM issue that you're fixing in the PR description.
- Wait for the PR to be merged.
- Send a PR to rust-lang/rust updating the
src/llvm-projectsubmodule with your bugfix. This can be done locally withgit submodule update --remote src/llvm-projecttypically. - Wait for PR to be merged.
An example PR: #59089
Backports (upstream not supported)
Upstream LLVM releases are only supported for two to three months after the GA release. Once upstream backports are no longer accepted, changes should be cherry-picked directly to our fork.
- Make sure the bugfix is in upstream LLVM.
- Identify the branch that rustc is currently using. The
src/llvm-projectsubmodule is always pinned to a branch of the rust-lang/llvm-project repository. - Fork the rust-lang/llvm-project repository.
- Check out the appropriate branch (typically named
rustc/a.b-yyyy-mm-dd). - Add a remote for the upstream repository using
git remote add upstream https://github.com/llvm/llvm-project.gitand fetch it usinggit fetch upstream. - Cherry-pick the relevant commit(s) using
git cherry-pick -x. - Push this branch to your fork.
- Send a Pull Request to rust-lang/llvm-project to the same branch as before. Be sure to reference the Rust and/or LLVM issue that you're fixing in the PR description.
- Wait for the PR to be merged.
- Send a PR to rust-lang/rust updating the
src/llvm-projectsubmodule with your bugfix. This can be done locally withgit submodule update --remote src/llvm-projecttypically. - Wait for PR to be merged.
An example PR: #59089
New LLVM Release Updates
Unlike bugfixes, updating to a new release of LLVM typically requires a lot more work. This is where we can't reasonably cherry-pick commits backwards, so we need to do a full update. There's a lot of stuff to do here, so let's go through each in detail.
-
LLVM announces that its latest release version has branched. This will show up as a branch in the llvm/llvm-project repository, typically named
release/$N.x, where$Nis the version of LLVM that's being released. -
Create a new branch in the rust-lang/llvm-project repository from this
release/$N.xbranch, and name itrustc/a.b-yyyy-mm-dd, wherea.bis the current version number of LLVM in-tree at the time of the branch, and the remaining part is the current date. -
Apply Rust-specific patches to the llvm-project repository. All features and bugfixes are upstream, but there's often some weird build-related patches that don't make sense to upstream. These patches are typically the latest patches in the rust-lang/llvm-project branch that rustc is currently using.
-
Build the new LLVM in the
rustrepository. To do this, you'll want to update thesrc/llvm-projectrepository to your branch, and the revision you've created. It's also typically a good idea to update.gitmoduleswith the new branch name of the LLVM submodule. Make sure you've committed changes tosrc/llvm-projectto ensure submodule updates aren't reverted. Some commands you should execute are:./x build src/llvm-project- test that LLVM still builds./x build- build the rest of rustc
You'll likely need to update
llvm-wrapper/*.cppto compile with updated LLVM bindings. Note that you should use#ifdefand such to ensure that the bindings still compile on older LLVM versions.Note that
profile = "compiler"and other defaults set by./x setupdownload LLVM from CI instead of building it from source. You should disable this temporarily to make sure your changes are being used. This is done by having the following setting inconfig.toml:[llvm] download-ci-llvm = false -
Test for regressions across other platforms. LLVM often has at least one bug for non-tier-1 architectures, so it's good to do some more testing before sending this to bors! If you're low on resources you can send the PR as-is now to bors, though, and it'll get tested anyway.
Ideally, build LLVM and test it on a few platforms:
- Linux
- macOS
- Windows
Afterwards, run some docker containers that CI also does:
./src/ci/docker/run.sh wasm32./src/ci/docker/run.sh arm-android./src/ci/docker/run.sh dist-various-1./src/ci/docker/run.sh dist-various-2./src/ci/docker/run.sh armhf-gnu
-
Prepare a PR to
rust-lang/rust. Work with maintainers ofrust-lang/llvm-projectto get your commit in a branch of that repository, and then you can send a PR torust-lang/rust. You'll change at leastsrc/llvm-projectand will likely also changellvm-wrapperas well.For prior art, here are some previous LLVM updates:
Note that sometimes it's easiest to land
llvm-wrappercompatibility as a PR before actually updatingsrc/llvm-project. This way, while you're working through LLVM issues, others interested in trying out the new LLVM can benefit from work you've done to update the C++ bindings. -
Over the next few months, LLVM will continually push commits to its
release/a.bbranch. We will often want to have those bug fixes as well. The merge process for that is to usegit mergeitself to merge LLVM'srelease/a.bbranch with the branch created in step 2. This is typically done multiple times when necessary while LLVM's release branch is baking. -
LLVM then announces the release of version
a.b. -
After LLVM's official release, we follow the process of creating a new branch on the rust-lang/llvm-project repository again, this time with a new date. It is only then that the PR to update Rust to use that version is merged.
The commit history of
rust-lang/llvm-projectshould look much cleaner as agit rebaseis done, where just a few Rust-specific commits are stacked on top of stock LLVM's release branch.
Caveats and gotchas
Ideally the above instructions are pretty smooth, but here's some caveats to keep in mind while going through them:
- LLVM bugs are hard to find, don't hesitate to ask for help! Bisection is definitely your friend here (yes LLVM takes forever to build, yet bisection is still your friend). Note that you can make use of Dev Desktops, which is an initiative to provide the contributors with remote access to powerful hardware.
- If you've got general questions, wg-llvm can help you out.
- Creating branches is a privileged operation on GitHub, so you'll need someone with write access to create the branches for you most likely.
Debugging LLVM
NOTE: If you are looking for info about code generation, please see this chapter instead.
This section is about debugging compiler bugs in code generation (e.g. why the compiler generated some piece of code or crashed in LLVM). LLVM is a big project on its own that probably needs to have its own debugging document (not that I could find one). But here are some tips that are important in a rustc context:
Minimize the example
As a general rule, compilers generate lots of information from analyzing code. Thus, a useful first step is usually to find a minimal example. One way to do this is to
-
create a new crate that reproduces the issue (e.g. adding whatever crate is at fault as a dependency, and using it from there)
-
minimize the crate by removing external dependencies; that is, moving everything relevant to the new crate
-
further minimize the issue by making the code shorter (there are tools that help with this like
creduce)
For more discussion on methodology for steps 2 and 3 above, there is an epic blog post from pnkfelix specifically about Rust program minimization.
Enable LLVM internal checks
The official compilers (including nightlies) have LLVM assertions disabled,
which means that LLVM assertion failures can show up as compiler crashes (not
ICEs but "real" crashes) and other sorts of weird behavior. If you are
encountering these, it is a good idea to try using a compiler with LLVM
assertions enabled - either an "alt" nightly or a compiler you build yourself
by setting [llvm] assertions=true in your config.toml - and see whether
anything turns up.
The rustc build process builds the LLVM tools into
./build/<host-triple>/llvm/bin. They can be called directly.
These tools include:
llc, which compiles bitcode (.bcfiles) to executable code; this can be used to replicate LLVM backend bugs.opt, a bitcode transformer that runs LLVM optimization passes.bugpoint, which reduces large test cases to small, useful ones.- and many others, some of which are referenced in the text below.
By default, the Rust build system does not check for changes to the LLVM source code or
its build configuration settings. So, if you need to rebuild the LLVM that is linked
into rustc, first delete the file llvm-finished-building, which should be located
in build/<host-triple>/llvm/.
The default rustc compilation pipeline has multiple codegen units, which is
hard to replicate manually and means that LLVM is called multiple times in
parallel. If you can get away with it (i.e. if it doesn't make your bug
disappear), passing -C codegen-units=1 to rustc will make debugging easier.
Get your hands on raw LLVM input
For rustc to generate LLVM IR, you need to pass the --emit=llvm-ir flag. If
you are building via cargo, use the RUSTFLAGS environment variable (e.g.
RUSTFLAGS='--emit=llvm-ir'). This causes rustc to spit out LLVM IR into the
target directory.
cargo llvm-ir [options] path spits out the LLVM IR for a particular function
at path. (cargo install cargo-asm installs cargo asm and cargo llvm-ir). --build-type=debug emits code for debug builds. There are also
other useful options. Also, debug info in LLVM IR can clutter the output a lot:
RUSTFLAGS="-C debuginfo=0" is really useful.
RUSTFLAGS="-C save-temps" outputs LLVM bitcode (not the same as IR) at
different stages during compilation, which is sometimes useful. The output LLVM
bitcode will be in .bc files in the compiler's output directory, set via the
--out-dir DIR argument to rustc.
-
If you are hitting an assertion failure or segmentation fault from the LLVM backend when invoking
rustcitself, it is a good idea to try passing each of these.bcfiles to thellccommand, and see if you get the same failure. (LLVM developers often prefer a bug reduced to a.bcfile over one that uses a Rust crate for its minimized reproduction.) -
To get human readable versions of the LLVM bitcode, one just needs to convert the bitcode (
.bc) files to.llfiles usingllvm-dis, which should be in the target local compilation of rustc.
Note that rustc emits different IR depending on whether -O is enabled, even
without LLVM's optimizations, so if you want to play with the IR rustc emits,
you should:
$ rustc +local my-file.rs --emit=llvm-ir -O -C no-prepopulate-passes \
-C codegen-units=1
$ OPT=./build/$TRIPLE/llvm/bin/opt
$ $OPT -S -O2 < my-file.ll > my
If you just want to get the LLVM IR during the LLVM pipeline, to e.g. see which
IR causes an optimization-time assertion to fail, or to see when LLVM performs
a particular optimization, you can pass the rustc flag -C llvm-args=-print-after-all, and possibly add -C llvm-args='-filter-print-funcs=EXACT_FUNCTION_NAME (e.g. -C llvm-args='-filter-print-funcs=_ZN11collections3str21_$LT$impl$u20$str$GT$\ 7replace17hbe10ea2e7c809b0bE').
That produces a lot of output into standard error, so you'll want to pipe that
to some file. Also, if you are using neither -filter-print-funcs nor -C codegen-units=1, then, because the multiple codegen units run in parallel, the
printouts will mix together and you won't be able to read anything.
-
One caveat to the aforementioned methodology: the
-printfamily of options to LLVM only prints the IR unit that the pass runs on (e.g., just a function), and does not include any referenced declarations, globals, metadata, etc. This means you cannot in general feed the output of-printintollcto reproduce a given problem. -
Within LLVM itself, calling
F.getParent()->dump()at the beginning ofSafeStackLegacyPass::runOnFunctionwill dump the whole module, which may provide better basis for reproduction. (However, you should be able to get that same dump from the.bcfiles dumped by-C save-temps.)
If you want just the IR for a specific function (say, you want to see why it
causes an assertion or doesn't optimize correctly), you can use llvm-extract,
e.g.
$ ./build/$TRIPLE/llvm/bin/llvm-extract \
-func='_ZN11collections3str21_$LT$impl$u20$str$GT$7replace17hbe10ea2e7c809b0bE' \
-S \
< unextracted.ll \
> extracted.ll
Investigate LLVM optimization passes
If you are seeing incorrect behavior due to an optimization pass, a very handy
LLVM option is -opt-bisect-limit, which takes an integer denoting the index
value of the highest pass to run. Index values for taken passes are stable
from run to run; by coupling this with software that automates bisecting the
search space based on the resulting program, an errant pass can be quickly
determined. When an -opt-bisect-limit is specified, all runs are displayed
to standard error, along with their index and output indicating if the
pass was run or skipped. Setting the limit to an index of -1 (e.g.,
RUSTFLAGS="-C llvm-args=-opt-bisect-limit=-1") will show all passes and
their corresponding index values.
If you want to play with the optimization pipeline, you can use the opt tool
from ./build/<host-triple>/llvm/bin/ with the LLVM IR emitted by rustc.
When investigating the implementation of LLVM itself, you should be aware of its internal debug infrastructure. This is provided in LLVM Debug builds, which you enable for rustc LLVM builds by changing this setting in the config.toml:
[llvm]
# Indicates whether the LLVM assertions are enabled or not
assertions = true
# Indicates whether the LLVM build is a Release or Debug build
optimize = false
The quick summary is:
- Setting
assertions=trueenables coarse-grain debug messaging.- beyond that, setting
optimize=falseenables fine-grain debug messaging.
- beyond that, setting
LLVM_DEBUG(dbgs() << msg)in LLVM is likedebug!(msg)inrustc.- The
-debugoption turns on all messaging; it is like setting the environment variableRUSTC_LOG=debuginrustc. - The
-debug-only=<pass1>,<pass2>variant is more selective; it is like setting the environment variableRUSTC_LOG=path1,path2inrustc.
Getting help and asking questions
If you have some questions, head over to the rust-lang Zulip and
specifically the #t-compiler/wg-llvm stream.
Compiler options to know and love
The -C help and -Z help compiler switches will list out a variety
of interesting options you may find useful. Here are a few of the most
common that pertain to LLVM development (some of them are employed in the
tutorial above):
- The
--emit llvm-iroption emits a<filename>.llfile with LLVM IR in textual format- The
--emit llvm-bcoption emits in bytecode format (<filename>.bc)
- The
- Passing
-C llvm-args=<foo>allows passing pretty much all the options that tools like llc and opt would accept; e.g.-C llvm-args=-print-before-allto print IR before every LLVM pass. - The
-C no-prepopulate-passeswill avoid pre-populate the LLVM pass manager with a list of passes. This will allow you to view the LLVM IR that rustc generates, not the LLVM IR after optimizations. - The
-C passes=valoption allows you to supply a space separated list of extra LLVM passes to run - The
-C save-tempsoption saves all temporary output files during compilation - The
-Z print-llvm-passesoption will print out LLVM optimization passes being run - The
-Z time-llvm-passesoption measures the time of each LLVM pass - The
-Z verify-llvm-iroption will verify the LLVM IR for correctness - The
-Z no-parallel-backendwill disable parallel compilation of distinct compilation units - The
-Z llvm-time-traceoption will output a Chrome profiler compatible JSON file which contains details and timings for LLVM passes. - The
-C llvm-args=-opt-bisect-limit=<index>option allows for bisecting LLVM optimizations.
Filing LLVM bug reports
When filing an LLVM bug report, you will probably want some sort of minimal working example that demonstrates the problem. The Godbolt compiler explorer is really helpful for this.
-
Once you have some LLVM IR for the problematic code (see above), you can create a minimal working example with Godbolt. Go to llvm.godbolt.org.
-
Choose
LLVM-IRas programming language. -
Use
llcto compile the IR to a particular target as is:- There are some useful flags:
-mattrenables target features,-march=selects the target,-mcpu=selects the CPU, etc. - Commands like
llc -march=helpoutput all architectures available, which is useful because sometimes the Rust arch names and the LLVM names do not match. - If you have compiled rustc yourself somewhere, in the target directory
you have binaries for
llc,opt, etc.
- There are some useful flags:
-
If you want to optimize the LLVM-IR, you can use
optto see how the LLVM optimizations transform it. -
Once you have a godbolt link demonstrating the issue, it is pretty easy to fill in an LLVM bug. Just visit their github issues page.
Porting bug fixes from LLVM
Once you've identified the bug as an LLVM bug, you will sometimes find that it has already been reported and fixed in LLVM, but we haven't gotten the fix yet (or perhaps you are familiar enough with LLVM to fix it yourself).
In that case, we can sometimes opt to port the fix for the bug directly to our own LLVM fork, so that rustc can use it more easily. Our fork of LLVM is maintained in rust-lang/llvm-project. Once you've landed the fix there, you'll also need to land a PR modifying our submodule commits -- ask around on Zulip for help.
Backend Agnostic Codegen
rustc_codegen_ssa
provides an abstract interface for all backends to implement,
namely LLVM, Cranelift, and GCC.
Below is some background information on the refactoring that created this abstract interface.
Refactoring of rustc_codegen_llvm
by Denis Merigoux, October 23rd 2018
State of the code before the refactoring
All the code related to the compilation of MIR into LLVM IR was contained
inside the rustc_codegen_llvm crate. Here is the breakdown of the most
important elements:
- the
backfolder (7,800 LOC) implements the mechanisms for creating the different object files and archive through LLVM, but also the communication mechanisms for parallel code generation; - the
debuginfo(3,200 LOC) folder contains all code that passes debug information down to LLVM; - the
llvm(2,200 LOC) folder defines the FFI necessary to communicate with LLVM using the C++ API; - the
mir(4,300 LOC) folder implements the actual lowering from MIR to LLVM IR; - the
base.rs(1,300 LOC) file contains some helper functions but also the high-level code that launches the code generation and distributes the work. - the
builder.rs(1,200 LOC) file contains all the functions generating individual LLVM IR instructions inside a basic block; - the
common.rs(450 LOC) contains various helper functions and all the functions generating LLVM static values; - the
type_.rs(300 LOC) defines most of the type translations to LLVM IR.
The goal of this refactoring is to separate inside this crate code that is
specific to the LLVM from code that can be reused for other rustc backends. For
instance, the mir folder is almost entirely backend-specific but it relies
heavily on other parts of the crate. The separation of the code must not affect
the logic of the code nor its performance.
For these reasons, the separation process involves two transformations that have to be done at the same time for the resulting code to compile :
- replace all the LLVM-specific types by generics inside function signatures and structure definitions;
- encapsulate all functions calling the LLVM FFI inside a set of traits that will define the interface between backend-agnostic code and the backend.
While the LLVM-specific code will be left in rustc_codegen_llvm, all the new
traits and backend-agnostic code will be moved in rustc_codegen_ssa (name
suggestion by @eddyb).
Generic types and structures
@irinagpopa started to parametrize the types of rustc_codegen_llvm by a
generic Value type, implemented in LLVM by a reference &'ll Value. This
work has been extended to all structures inside the mir folder and elsewhere,
as well as for LLVM's BasicBlock and Type types.
The two most important structures for the LLVM codegen are CodegenCx and
Builder. They are parametrized by multiple lifetime parameters and the type
for Value.
struct CodegenCx<'ll, 'tcx> {
/* ... */
}
struct Builder<'a, 'll, 'tcx> {
cx: &'a CodegenCx<'ll, 'tcx>,
/* ... */
}
CodegenCx is used to compile one codegen-unit that can contain multiple
functions, whereas Builder is created to compile one basic block.
The code in rustc_codegen_llvm has to deal with multiple explicit lifetime
parameters, that correspond to the following:
'tcxis the longest lifetime, that corresponds to the originalTyCtxtcontaining the program's information;'ais a short-lived reference of aCodegenCxor another object inside a struct;'llis the lifetime of references to LLVM objects such asValueorType.
Although there are already many lifetime parameters in the code, making it
generic uncovered situations where the borrow-checker was passing only due to
the special nature of the LLVM objects manipulated (they are extern pointers).
For instance, an additional lifetime parameter had to be added to
LocalAnalyser in analyse.rs, leading to the definition:
struct LocalAnalyzer<'mir, 'a, 'tcx> {
/* ... */
}
However, the two most important structures CodegenCx and Builder are not
defined in the backend-agnostic code. Indeed, their content is highly specific
of the backend and it makes more sense to leave their definition to the backend
implementor than to allow just a narrow spot via a generic field for the
backend's context.
Traits and interface
Because they have to be defined by the backend, CodegenCx and Builder will
be the structures implementing all the traits defining the backend's interface.
These traits are defined in the folder rustc_codegen_ssa/traits and all the
backend-agnostic code is parametrized by them. For instance, let us explain how
a function in base.rs is parametrized:
pub fn codegen_instance<'a, 'tcx, Bx: BuilderMethods<'a, 'tcx>>(
cx: &'a Bx::CodegenCx,
instance: Instance<'tcx>
) {
/* ... */
}
In this signature, we have the two lifetime parameters explained earlier and
the master type Bx which satisfies the trait BuilderMethods corresponding
to the interface satisfied by the Builder struct. The BuilderMethods
defines an associated type Bx::CodegenCx that itself satisfies the
CodegenMethods traits implemented by the struct CodegenCx.
On the trait side, here is an example with part of the definition of
BuilderMethods in traits/builder.rs:
pub trait BuilderMethods<'a, 'tcx>:
HasCodegen<'tcx>
+ DebugInfoBuilderMethods<'tcx>
+ ArgTypeMethods<'tcx>
+ AbiBuilderMethods<'tcx>
+ IntrinsicCallMethods<'tcx>
+ AsmBuilderMethods<'tcx>
{
fn new_block<'b>(
cx: &'a Self::CodegenCx,
llfn: Self::Function,
name: &'b str
) -> Self;
/* ... */
fn cond_br(
&mut self,
cond: Self::Value,
then_llbb: Self::BasicBlock,
else_llbb: Self::BasicBlock,
);
/* ... */
}
Finally, a master structure implementing the ExtraBackendMethods trait is
used for high-level codegen-driving functions like codegen_crate in
base.rs. For LLVM, it is the empty LlvmCodegenBackend.
ExtraBackendMethods should be implemented by the same structure that
implements the CodegenBackend defined in
rustc_codegen_utils/codegen_backend.rs.
During the traitification process, certain functions have been converted from
methods of a local structure to methods of CodegenCx or Builder and a
corresponding self parameter has been added. Indeed, LLVM stores information
internally that it can access when called through its API. This information
does not show up in a Rust data structure carried around when these methods are
called. However, when implementing a Rust backend for rustc, these methods
will need information from CodegenCx, hence the additional parameter (unused
in the LLVM implementation of the trait).
State of the code after the refactoring
The traits offer an API which is very similar to the API of LLVM. This is not the best solution since LLVM has a very special way of doing things: when adding another backend, the traits definition might be changed in order to offer more flexibility.
However, the current separation between backend-agnostic and LLVM-specific code
has allowed the reuse of a significant part of the old rustc_codegen_llvm.
Here is the new LOC breakdown between backend-agnostic (BA) and LLVM for the
most important elements:
backfolder: 3,800 (BA) vs 4,100 (LLVM);mirfolder: 4,400 (BA) vs 0 (LLVM);base.rs: 1,100 (BA) vs 250 (LLVM);builder.rs: 1,400 (BA) vs 0 (LLVM);common.rs: 350 (BA) vs 350 (LLVM);
The debuginfo folder has been left almost untouched by the splitting and is
specific to LLVM. Only its high-level features have been traitified.
The new traits folder has 1500 LOC only for trait definitions. Overall, the
27,000 LOC-sized old rustc_codegen_llvm code has been split into the new
18,500 LOC-sized new rustc_codegen_llvm and the 12,000 LOC-sized
rustc_codegen_ssa. We can say that this refactoring allowed the reuse of
approximately 10,000 LOC that would otherwise have had to be duplicated between
the multiple backends of rustc.
The refactored version of rustc's backend introduced no regression over the
test suite nor in performance benchmark, which is in coherence with the nature
of the refactoring that used only compile-time parametricity (no trait
objects).
Implicit Caller Location
- Motivating Example
- Reading Caller Location
- Caller Location in
const - Generating code for
#[track_caller]callees - The Attribute
- Background/History
Approved in RFC 2091, this feature enables the accurate reporting of caller location during panics
initiated from functions like Option::unwrap, Result::expect, and Index::index. This feature
adds the #[track_caller] attribute for functions, the
caller_location intrinsic, and the stabilization-friendly
core::panic::Location::caller wrapper.
Motivating Example
Take this example program:
fn main() { let foo: Option<()> = None; foo.unwrap(); // this should produce a useful panic message! }
Prior to Rust 1.42, panics like this unwrap() printed a location in core:
$ rustc +1.41.0 example.rs; example.exe
thread 'main' panicked at 'called `Option::unwrap()` on a `None` value',...core\macros\mod.rs:15:40
note: run with `RUST_BACKTRACE=1` environment variable to display a backtrace.
As of 1.42, we get a much more helpful message:
$ rustc +1.42.0 example.rs; example.exe
thread 'main' panicked at 'called `Option::unwrap()` on a `None` value', example.rs:3:5
note: run with `RUST_BACKTRACE=1` environment variable to display a backtrace
These error messages are achieved through a combination of changes to panic! internals to make use
of core::panic::Location::caller and a number of #[track_caller] annotations in the standard
library which propagate caller information.
Reading Caller Location
Previously, panic! made use of the file!(), line!(), and column!() macros to construct a
Location pointing to where the panic occurred. These macros couldn't be given an overridden
location, so functions which intentionally invoked panic! couldn't provide their own location,
hiding the actual source of error.
Internally, panic!() now calls core::panic::Location::caller() to find out where it
was expanded. This function is itself annotated with #[track_caller] and wraps the
caller_location compiler intrinsic implemented by rustc. This intrinsic is easiest
explained in terms of how it works in a const context.
Caller Location in const
There are two main phases to returning the caller location in a const context: walking up the stack to find the right location and allocating a const value to return.
Finding the right Location
In a const context we "walk up the stack" from where the intrinsic is invoked, stopping when we
reach the first function call in the stack which does not have the attribute. This walk is in
InterpCx::find_closest_untracked_caller_location().
Starting at the bottom, we iterate up over stack Frames in the
InterpCx::stack, calling
InstanceKind::requires_caller_location on the
Instances from each Frame. We stop once we find one that returns false and
return the span of the previous frame which was the "topmost" tracked function.
Allocating a static Location
Once we have a Span, we need to allocate static memory for the Location, which is performed by
the TyCtxt::const_caller_location() query. Internally this calls
InterpCx::alloc_caller_location() and results in a unique
memory kind (MemoryKind::CallerLocation). The SSA codegen backend is able
to emit code for these same values, and we use this code there as well.
Once our Location has been allocated in static memory, our intrinsic returns a reference to it.
Generating code for #[track_caller] callees
To generate efficient code for a tracked function and its callers, we need to provide the same behavior from the intrinsic's point of view without having a stack to walk up at runtime. We invert the approach: as we grow the stack down we pass an additional argument to calls of tracked functions rather than walking up the stack when the intrinsic is called. That additional argument can be returned wherever the caller location is queried.
The argument we append is of type &'static core::panic::Location<'static>. A reference was chosen
to avoid unnecessary copying because a pointer is a third the size of
std::mem::size_of::<core::panic::Location>() == 24 at time of writing.
When generating a call to a function which is tracked, we pass the location argument the value of
FunctionCx::get_caller_location.
If the calling function is tracked, get_caller_location returns the local in
FunctionCx::caller_location which was populated by the current caller's caller.
In these cases the intrinsic "returns" a reference which was actually provided in an argument to its
caller.
If the calling function is not tracked, get_caller_location allocates a Location static from
the current Span and returns a reference to that.
We more efficiently achieve the same behavior as a loop starting from the bottom by passing a single
&Location value through the caller_location fields of multiple FunctionCxs as we grow the
stack downward.
Codegen examples
What does this transformation look like in practice? Take this example which uses the new feature:
#![feature(track_caller)] use std::panic::Location; #[track_caller] fn print_caller() { println!("called from {}", Location::caller()); } fn main() { print_caller(); }
Here print_caller() appears to take no arguments, but we compile it to something like this:
#![feature(panic_internals)] use std::panic::Location; fn print_caller(caller: &Location) { println!("called from {}", caller); } fn main() { print_caller(&Location::internal_constructor(file!(), line!(), column!())); }
Dynamic Dispatch
In codegen contexts we have to modify the callee ABI to pass this information down the stack, but the attribute expressly does not modify the type of the function. The ABI change must be transparent to type checking and remain sound in all uses.
Direct calls to tracked functions will always know the full codegen flags for the callee and can
generate appropriate code. Indirect callers won't have this information and it's not encoded in
the type of the function pointer they call, so we generate a ReifyShim around the function
whenever taking a pointer to it. This shim isn't able to report the actual location of the indirect
call (the function's definition site is reported instead), but it prevents miscompilation and is
probably the best we can do without modifying fully-stabilized type signatures.
Note: We always emit a
ReifyShimwhen taking a pointer to a tracked function. While the constraint here is imposed by codegen contexts, we don't know during MIR construction of the shim whether we'll be called in a const context (safe to ignore shim) or in a codegen context (unsafe to ignore shim). Even if we did know, the results from const and codegen contexts must agree.
The Attribute
The #[track_caller] attribute is checked alongside other codegen attributes to ensure the
function:
- has the
"Rust"ABI (as opposed to e.g.,"C") - is not a closure
- is not
#[naked]
If the use is valid, we set CodegenFnAttrsFlags::TRACK_CALLER. This flag influences
the return value of InstanceKind::requires_caller_location which is in turn
used in both const and codegen contexts to ensure correct propagation.
Traits
When applied to trait method implementations, the attribute works as it does for regular functions.
When applied to a trait method prototype, the attribute applies to all implementations of the method. When applied to a default trait method implementation, the attribute takes effect on that implementation and any overrides.
Examples:
#![feature(track_caller)] macro_rules! assert_tracked { () => {{ let location = std::panic::Location::caller(); assert_eq!(location.file(), file!()); assert_ne!(location.line(), line!(), "line should be outside this fn"); println!("called at {}", location); }}; } trait TrackedFourWays { /// All implementations inherit `#[track_caller]`. #[track_caller] fn blanket_tracked(); /// Implementors can annotate themselves. fn local_tracked(); /// This implementation is tracked (overrides are too). #[track_caller] fn default_tracked() { assert_tracked!(); } /// Overrides of this implementation are tracked (it is too). #[track_caller] fn default_tracked_to_override() { assert_tracked!(); } } /// This impl uses the default impl for `default_tracked` and provides its own for /// `default_tracked_to_override`. impl TrackedFourWays for () { fn blanket_tracked() { assert_tracked!(); } #[track_caller] fn local_tracked() { assert_tracked!(); } fn default_tracked_to_override() { assert_tracked!(); } } fn main() { <() as TrackedFourWays>::blanket_tracked(); <() as TrackedFourWays>::default_tracked(); <() as TrackedFourWays>::default_tracked_to_override(); <() as TrackedFourWays>::local_tracked(); }
Background/History
Broadly speaking, this feature's goal is to improve common Rust error messages without breaking stability guarantees, requiring modifications to end-user source, relying on platform-specific debug-info, or preventing user-defined types from having the same error-reporting benefits.
Improving the output of these panics has been a goal of proposals since at least mid-2016 (see non-viable alternatives in the approved RFC for details). It took two more years until RFC 2091 was approved, much of its rationale for this feature's design having been discovered through the discussion around several earlier proposals.
The design in the original RFC limited itself to implementations that could be done inside the compiler at the time without significant refactoring. However in the year and a half between the approval of the RFC and the actual implementation work, a revised design was proposed and written up on the tracking issue. During the course of implementing that, it was also discovered that an implementation was possible without modifying the number of arguments in a function's MIR, which would simplify later stages and unlock use in traits.
Because the RFC's implementation strategy could not readily support traits, the semantics were not originally specified. They have since been implemented following the path which seemed most correct to the author and reviewers.
Libraries and Metadata
When the compiler sees a reference to an external crate, it needs to load some information about that crate. This chapter gives an overview of that process, and the supported file formats for crate libraries.
Libraries
A crate dependency can be loaded from an rlib, dylib, or rmeta file. A
key point of these file formats is that they contain rustc-specific
metadata. This metadata allows the compiler to discover enough
information about the external crate to understand the items it contains,
which macros it exports, and much more.
rlib
An rlib is an archive file, which is similar to a tar file. This file
format is specific to rustc, and may change over time. This file contains:
- Object code, which is the result of code generation. This is used during
regular linking. There is a separate
.ofile for each codegen unit. The codegen step can be skipped with the-C linker-plugin-ltoCLI option, which means each.ofile will only contain LLVM bitcode. - LLVM bitcode, which is a binary representation of LLVM's intermediate
representation, which is embedded as a section in the
.ofiles. This can be used for Link Time Optimization (LTO). This can be removed with the-C embed-bitcode=noCLI option to improve compile times and reduce disk space if LTO is not needed. rustcmetadata, in a file namedlib.rmeta.- A symbol table, which is generally a list of symbols with offsets to the object file that contain that symbol. This is pretty standard for archive files.
dylib
A dylib is a platform-specific shared library. It includes the rustc
metadata in a special link section called .rustc in a compressed format.
rmeta
An rmeta file is custom binary format that contains the metadata for the
crate. This file can be used for fast "checks" of a project by skipping all
code generation (as is done with cargo check), collecting enough information
for documentation (as is done with cargo doc), or for
pipelining. This file is created if the
--emit=metadata CLI option is used.
rmeta files do not support linking, since they do not contain compiled
object files.
Metadata
The metadata contains a wide swath of different elements. This guide will not
go into detail of every field it contains. You are encouraged to browse the
CrateRoot definition to get a sense of the different elements it contains.
Everything about metadata encoding and decoding is in the rustc_metadata
package.
Here are a few highlights of things it contains:
- The version of the
rustccompiler. The compiler will refuse to load files from any other version. - The Strict Version Hash (SVH). This helps ensure the correct dependency is loaded.
- The Stable Crate Id. This is a hash used to identify crates.
- Information about all the source files in the library. This can be used for a variety of things, such as diagnostics pointing to sources in a dependency.
- Information about exported macros, traits, types, and items. Generally, anything that's needed to be known when a path references something inside a crate dependency.
- Encoded MIR. This is optional, and only encoded if needed for code
generation.
cargo checkskips this for performance reasons.
Strict Version Hash
The Strict Version Hash (SVH, also known as the "crate hash") is a 64-bit hash that is used to ensure that the correct crate dependencies are loaded. It is possible for a directory to contain multiple copies of the same dependency built with different settings, or built from different sources. The crate loader will skip any crates that have the wrong SVH.
The SVH is also used for the incremental compilation session filename, though that usage is mostly historic.
The hash includes a variety of elements:
- Hashes of the HIR nodes.
- All of the upstream crate hashes.
- All of the source filenames.
- Hashes of certain command-line flags (like
-C metadatavia the Stable Crate Id, and all CLI options marked with[TRACKED]).
See compute_hir_hash for where the hash is actually computed.
Stable Crate Id
The StableCrateId is a 64-bit hash used to identify different crates with
potentially the same name. It is a hash of the crate name and all the
-C metadata CLI options computed in StableCrateId::new. It is
used in a variety of places, such as symbol name mangling, crate loading, and
much more.
By default, all Rust symbols are mangled and incorporate the stable crate id.
This allows multiple versions of the same crate to be included together. Cargo
automatically generates -C metadata hashes based on a variety of factors,
like the package version, source, and the target kind (a lib and test can have
the same crate name, so they need to be disambiguated).
Crate loading
Crate loading can have quite a few subtle complexities. During name
resolution, when an external crate is referenced (via an extern crate or
path), the resolver uses the CrateLoader which is responsible for finding
the crate libraries and loading the metadata for them. After the dependency
is loaded, the CrateLoader will provide the information the resolver needs
to perform its job (such as expanding macros, resolving paths, etc.).
To load each external crate, the CrateLoader uses a CrateLocator to
actually find the correct files for one specific crate. There is some great
documentation in the locator module that goes into detail on how loading
works, and I strongly suggest reading it to get the full picture.
The location of a dependency can come from several different places. Direct
dependencies are usually passed with --extern flags, and the loader can look
at those directly. Direct dependencies often have references to their own
dependencies, which need to be loaded, too. These are usually found by
scanning the directories passed with the -L flag for any file whose metadata
contains a matching crate name and SVH. The loader
will also look at the sysroot to find dependencies.
As crates are loaded, they are kept in the CStore with the crate metadata
wrapped in the CrateMetadata struct. After resolution and expansion, the
CStore will make its way into the GlobalCtxt for the rest of
compilation.
Pipelining
One trick to improve compile times is to start building a crate as soon as the
metadata for its dependencies is available. For a library, there is no need to
wait for the code generation of dependencies to finish. Cargo implements this
technique by telling rustc to emit an rmeta file for each
dependency as well as an rlib. As early as it can, rustc will
save the rmeta file to disk before it continues to the code generation
phase. The compiler sends a JSON message to let the build tool know that it
can start building the next crate if possible.
The crate loading system is smart enough to know when it
sees an rmeta file to use that if the rlib is not there (or has only been
partially written).
This pipelining isn't possible for binaries, because the linking phase will require the code generation of all its dependencies. In the future, it may be possible to further improve this scenario by splitting linking into a separate command (see #64191).
Profile Guided Optimization
- What Is Profiled-Guided Optimization?
- How is PGO implemented in
rustc? - Testing PGO
- Additional Information
rustc supports doing profile-guided optimization (PGO).
This chapter describes what PGO is and how the support for it is
implemented in rustc.
What Is Profiled-Guided Optimization?
The basic concept of PGO is to collect data about the typical execution of a program (e.g. which branches it is likely to take) and then use this data to inform optimizations such as inlining, machine-code layout, register allocation, etc.
There are different ways of collecting data about a program's execution.
One is to run the program inside a profiler (such as perf) and another
is to create an instrumented binary, that is, a binary that has data
collection built into it, and run that.
The latter usually provides more accurate data.
How is PGO implemented in rustc?
rustc current PGO implementation relies entirely on LLVM.
LLVM actually supports multiple forms of PGO:
- Sampling-based PGO where an external profiling tool like
perfis used to collect data about a program's execution. - GCOV-based profiling, where code coverage infrastructure is used to collect profiling information.
- Front-end based instrumentation, where the compiler front-end (e.g. Clang) inserts instrumentation intrinsics into the LLVM IR it generates (but see the 1"Note").
- IR-level instrumentation, where LLVM inserts the instrumentation intrinsics itself during optimization passes.
rustc supports only the last approach, IR-level instrumentation, mainly
because it is almost exclusively implemented in LLVM and needs little
maintenance on the Rust side. Fortunately, it is also the most modern approach,
yielding the best results.
So, we are dealing with an instrumentation-based approach, i.e. profiling data is generated by a specially instrumented version of the program that's being optimized. Instrumentation-based PGO has two components: a compile-time component and run-time component, and one needs to understand the overall workflow to see how they interact.
Note: rustc now supports front-end-based coverage
instrumentation, via the experimental option
-C instrument-coverage, but using these
coverage results for PGO has not been attempted at this time.
Overall Workflow
Generating a PGO-optimized program involves the following four steps:
- Compile the program with instrumentation enabled (e.g.
rustc -C profile-generate main.rs) - Run the instrumented program (e.g.
./main) which generates adefault-<id>.profrawfile - Convert the
.profrawfile into a.profdatafile using LLVM'sllvm-profdatatool. - Compile the program again, this time making use of the profiling data
(e.g.
rustc -C profile-use=merged.profdata main.rs)
Compile-Time Aspects
Depending on which step in the above workflow we are in, two different things can happen at compile time:
Create Binaries with Instrumentation
As mentioned above, the profiling instrumentation is added by LLVM.
rustc instructs LLVM to do so by setting the appropriate
flags when creating LLVM PassManagers:
// `PMBR` is an `LLVMPassManagerBuilderRef`
unwrap(PMBR)->EnablePGOInstrGen = true;
// Instrumented binaries have a default output path for the `.profraw` file
// hard-coded into them:
unwrap(PMBR)->PGOInstrGen = PGOGenPath;
rustc also has to make sure that some of the symbols from LLVM's profiling
runtime are not removed by marking the with the right export level.
Compile Binaries Where Optimizations Make Use Of Profiling Data
In the final step of the workflow described above, the program is compiled
again, with the compiler using the gathered profiling data in order to drive
optimization decisions. rustc again leaves most of the work to LLVM here,
basically just telling the LLVM PassManagerBuilder
where the profiling data can be found:
unwrap(PMBR)->PGOInstrUse = PGOUsePath;
LLVM does the rest (e.g. setting branch weights, marking functions with
cold or inlinehint, etc).
Runtime Aspects
Instrumentation-based approaches always also have a runtime component, i.e. once we have an instrumented program, that program needs to be run in order to generate profiling data, and collecting and persisting this profiling data needs some infrastructure in place.
In the case of LLVM, these runtime components are implemented in
compiler-rt and statically linked into any instrumented
binaries.
The rustc version of this can be found in library/profiler_builtins which
basically packs the C code from compiler-rt into a Rust crate.
In order for profiler_builtins to be built, profiler = true must be set
in rustc's config.toml.
Testing PGO
Since the PGO workflow spans multiple compiler invocations most testing happens
in run-make tests (the relevant tests have pgo in their name).
There is also a codegen test that checks that some expected
instrumentation artifacts show up in LLVM IR.
Additional Information
Clang's documentation contains a good overview on PGO in LLVM.
LLVM Source-Based Code Coverage
- Recommended
config.tomlsettings - Rust symbol mangling
- Components of LLVM Coverage Instrumentation in
rustc - Testing LLVM Coverage
- Implementation Details of the
InstrumentCoverageMIR Pass
rustc supports detailed source-based code and test coverage analysis
with a command line option (-C instrument-coverage) that instruments Rust
libraries and binaries with additional instructions and data, at compile time.
The coverage instrumentation injects calls to the LLVM intrinsic instruction
llvm.instrprof.increment at code branches
(based on a MIR-based control flow analysis), and LLVM converts these to
instructions that increment static counters, when executed. The LLVM coverage
instrumentation also requires a Coverage Map that encodes source metadata,
mapping counter IDs--directly and indirectly--to the file locations (with
start and end line and column).
Rust libraries, with or without coverage instrumentation, can be linked into
instrumented binaries. When the program is executed and cleanly terminates,
LLVM libraries write the final counter values to a file (default.profraw or
a custom file set through environment variable LLVM_PROFILE_FILE).
Developers use existing LLVM coverage analysis tools to decode .profraw
files, with corresponding Coverage Maps (from matching binaries that produced
them), and generate various reports for analysis, for example:

Detailed instructions and examples are documented in the rustc book.
Recommended config.toml settings
When working on the coverage instrumentation code, it is usually necessary to
enable the profiler runtime by setting profiler = true in [build].
This allows the compiler to produce instrumented binaries, and makes it possible
to run the full coverage test suite.
Enabling debug assertions in the compiler and in LLVM is recommended, but not mandatory.
# Similar to the "compiler" profile, but also enables debug assertions in LLVM.
# These assertions can detect malformed coverage mappings in some cases.
profile = "codegen"
[build]
# IMPORTANT: This tells the build system to build the LLVM profiler runtime.
# Without it, the compiler can't produce coverage-instrumented binaries,
# and many of the coverage tests will be skipped.
profiler = true
[rust]
# Enable debug assertions in the compiler.
debug-assertions = true
Rust symbol mangling
-C instrument-coverage automatically enables Rust symbol mangling v0 (as
if the user specified -C symbol-mangling-version=v0 option when invoking
rustc) to ensure consistent and reversible name mangling. This has two
important benefits:
- LLVM coverage tools can analyze coverage over multiple runs, including some changes to source code; so mangled names must be consistent across compilations.
- LLVM coverage reports can report coverage by function, and even separates out the coverage counts of each unique instantiation of a generic function, if invoked with multiple type substitution variations.
Components of LLVM Coverage Instrumentation in rustc
LLVM Runtime Dependency
Coverage data is only generated by running the executable Rust program. rustc
statically links coverage-instrumented binaries with LLVM runtime code
(compiler-rt) that implements program hooks
(such as an exit hook) to write the counter values to the .profraw file.
In the rustc source tree,
library/profiler_builtins bundles the LLVM compiler-rt code into a Rust library crate.
Note that when building rustc,
profiler_builtins is only included when build.profiler = true is set in config.toml.
When compiling with -C instrument-coverage,
CrateLoader::postprocess() dynamically loads
profiler_builtins by calling inject_profiler_runtime().
MIR Pass: InstrumentCoverage
Coverage instrumentation is performed on the MIR with a MIR pass
called InstrumentCoverage. This MIR pass analyzes
the control flow graph (CFG)--represented by MIR BasicBlocks--to identify
code branches, attaches FunctionCoverageInfo to the function's body,
and injects additional Coverage statements into the
BasicBlocks.
A MIR Coverage statement is a virtual instruction that indicates a counter
should be incremented when its adjacent statements are executed, to count
a span of code (CodeRegion). It counts the number of times a
branch is executed, and is referred to by coverage mappings in the function's
coverage-info struct.
Note that many coverage counters will not be converted into
physical counters (or any other executable instructions) in the final binary.
Some of them will be (see CoverageKind::CounterIncrement),
but other counters can be computed on the fly, when generating a coverage
report, by mapping a CodeRegion to a coverage-counter expression.
As an example:
#![allow(unused)] fn main() { fn some_func(flag: bool) { // increment Counter(1) ... if flag { // increment Counter(2) ... } else { // count = Expression(1) = Counter(1) - Counter(2) ... } // count = Expression(2) = Counter(1) + Zero // or, alternatively, Expression(2) = Counter(2) + Expression(1) ... } }
In this example, four contiguous code regions are counted while only incrementing two counters.
CFG analysis is used to not only determine where the branches are, for
conditional expressions like if, else, match, and loop, but also to
determine where expressions can be used in place of physical counters.
The advantages of optimizing coverage through expressions are more pronounced
with loops. Loops generally include at least one conditional branch that
determines when to break out of a loop (a while condition, or an if or
match with a break). In MIR, this is typically lowered to a SwitchInt,
with one branch to stay in the loop, and another branch to break out of the
loop. The branch that breaks out will almost always execute less often,
so InstrumentCoverage chooses to add a CounterIncrement to that branch, and
uses an expression (Counter(loop) - Counter(break)) for the branch that
continues.
The InstrumentCoverage MIR pass is documented in
more detail below.
Counter Injection and Coverage Map Pre-staging
When the compiler enters the Codegen phase, with a
coverage-enabled MIR, codegen_statement() converts each
MIR Statement into some backend-specific action or instruction.
codegen_statement() forwards Coverage statements to
codegen_coverage():
#![allow(unused)] fn main() { pub fn codegen_statement(&mut self, mut bx: Bx, statement: &mir::Statement<'tcx>) -> Bx { ... match statement.kind { ... mir::StatementKind::Coverage(box ref coverage) => { self.codegen_coverage(bx, coverage, statement.source_info.scope); } }
codegen_coverage() handles inlined statements and then forwards the coverage
statement to Builder::add_coverage, which handles each CoverageKind as
follows:
- For both
CounterIncrementandExpressionUsed, the underlying counter or expression ID is passed through to the correspondingFunctionCoveragestruct to indicate that the corresponding regions of code were not removed by MIR optimizations. - For
CoverageKind::CounterIncrements, an instruction is injected in the backend IR to increment the physical counter, by calling theBuilderMethodinstrprof_increment().
#![allow(unused)] fn main() { fn add_coverage(&mut self, instance: Instance<'tcx>, coverage: &Coverage) { ... let Coverage { kind } = coverage; match *kind { CoverageKind::CounterIncrement { id } => { func_coverage.mark_counter_id_seen(id); ... bx.instrprof_increment(fn_name, hash, num_counters, index); } CoverageKind::ExpressionUsed { id } => { func_coverage.mark_expression_id_seen(id); } } } }
The function name
instrprof_increment()is taken from the LLVM intrinsic call of the same name (llvm.instrprof.increment), and uses the same arguments and types; but note that, up to and through this stage (even though modeled after LLVM's implementation for code coverage instrumentation), the data and instructions are not strictly LLVM-specific.But since LLVM is the only Rust-supported backend with the tooling to process this form of coverage instrumentation, the backend for
Coveragestatements is only implemented for LLVM, at this time.
Coverage Map Generation
With the instructions to increment counters now implemented in LLVM IR, the last remaining step is to inject the LLVM IR variables that hold the static data for the coverage map.
rustc_codegen_llvm's compile_codegen_unit() calls
coverageinfo_finalize(),
which delegates its implementation to the
rustc_codegen_llvm::coverageinfo::mapgen module.
For each function Instance (code-generated from MIR, including multiple
instances of the same MIR for generic functions that have different type
substitution combinations), mapgen's finalize() method queries the
Instance-associated FunctionCoverage for its Counters, Expressions,
and CodeRegions; and calls LLVM codegen APIs to generate
properly-configured variables in LLVM IR, according to very specific
details of the LLVM Coverage Mapping Format
(Version 6).1
The Rust compiler (as of Nov 2024) supports LLVM Coverage Mapping Format 6. The Rust compiler will automatically use the most up-to-date coverage mapping format version that is compatible with the compiler's built-in version of LLVM.
#![allow(unused)] fn main() { pub fn finalize<'ll, 'tcx>(cx: &CodegenCx<'ll, 'tcx>) { ... if !tcx.sess.instrument_coverage_except_unused_functions() { add_unused_functions(cx); } let mut function_coverage_map = match cx.coverage_context() { Some(ctx) => ctx.take_function_coverage_map(), None => return, }; ... let mut mapgen = CoverageMapGenerator::new(); for (instance, function_coverage) in function_coverage_map { ... let coverage_mapping_buffer = llvm::build_byte_buffer(|coverage_mapping_buffer| { mapgen.write_coverage_mapping(expressions, counter_regions, coverage_mapping_buffer); }); }
code snippet trimmed for brevity
One notable first step performed by mapgen::finalize() is the call to
add_unused_functions():
When finalizing the coverage map, FunctionCoverage only has the CodeRegions
and counters for the functions that went through codegen; such as public
functions and "used" functions (functions referenced by other "used" or public
items). Any other functions (considered unused) were still parsed and processed
through the MIR stage.
The set of unused functions is computed via the set difference of all MIR
DefIds (tcx query mir_keys) minus the codegenned DefIds (tcx query
codegened_and_inlined_items). add_unused_functions() computes the set of
unused functions, queries the tcx for the previously-computed CodeRegions,
for each unused MIR, synthesizes an LLVM function (with no internal statements,
since it will not be called), and adds a new FunctionCoverage, with
Unreachable code regions.
Testing LLVM Coverage
(See also the compiletest documentation for the tests/coverage
test suite.)
Coverage instrumentation in the MIR is validated by a mir-opt test:
tests/mir-opt/coverage/instrument_coverage.rs.
Coverage instrumentation in LLVM IR is validated by the tests/coverage
test suite in coverage-map mode.
These tests compile a test program to LLVM IR assembly, and then
use the src/tools/coverage-dump tool to extract and pretty-print the
coverage mappings that would be embedded in the final binary.
End-to-end testing of coverage instrumentation and coverage reporting is
performed by the tests/coverage test suite in coverage-run mode,
and by the tests/coverage-run-rustdoc test suite.
These tests compile and run a test program with coverage
instrumentation, then use LLVM tools to convert the coverage data into a
human-readable coverage report.
Tests in
coverage-runmode have an implicit//@ needs-profiler-runtimedirective, so they will be skipped if the profiler runtime has not been enabled inconfig.toml.
Finally, the tests/codegen/instrument-coverage/testprog.rs test compiles a simple Rust program
with -C instrument-coverage and compares the compiled program's LLVM IR to
expected LLVM IR instructions and structured data for a coverage-enabled
program, including various checks for Coverage Map-related metadata and the LLVM
intrinsic calls to increment the runtime counters.
Expected results for the coverage, coverage-run-rustdoc,
and mir-opt tests can be refreshed by running:
./x test coverage --bless
./x test coverage-run-rustdoc --bless
./x test tests/mir-opt --bless
Implementation Details of the InstrumentCoverage MIR Pass
The bulk of the implementation of the InstrumentCoverage MIR pass is performed
by instrument_function_for_coverage. For each eligible MIR body, the instrumentor:
- Prepares a coverage graph
- Extracts mapping information from MIR
- Prepares counters for each relevant node/edge in the coverage graph
- Creates mapping data to be embedded in side-tables attached to the MIR body
- Injects counters and other coverage statements into MIR
The coverage graph is a coverage-specific simplification of the MIR control
flow graph (CFG). Its nodes are BasicCoverageBlocks, which
encompass one or more sequentially-executed MIR BasicBlocks
(with no internal branching).
Nodes and edges in the graph can have associated BcbCounters, which are
stored in CoverageCounters.
The CoverageGraph
The CoverageGraph is derived from the MIR (mir::Body).
#![allow(unused)] fn main() { let basic_coverage_blocks = CoverageGraph::from_mir(mir_body); }
Like mir::Body, the CoverageGraph is also a
DirectedGraph. Both graphs represent the function's
fundamental control flow, with many of the same
graph traits, supporting start_node(), num_nodes(),
successors(), predecessors(), and is_dominated_by().
For anyone that knows how to work with the MIR, as a CFG, the
CoverageGraph will be familiar, and can be used in much the same way.
The nodes of the CoverageGraph are BasicCoverageBlocks (BCBs), which
index into an IndexVec of BasicCoverageBlockData. This is analogous
to the MIR CFG of BasicBlocks that index BasicBlockData.
Each BasicCoverageBlockData captures one or more MIR BasicBlocks,
exclusively, and represents the maximal-length sequence of BasicBlocks
without conditional branches.
compute_basic_coverage_blocks() builds the
CoverageGraph as a coverage-specific simplification of the MIR CFG. In
contrast with the SimplifyCfg MIR pass, this step does
not alter the MIR itself, because the CoverageGraph aggressively simplifies
the CFG, and ignores nodes that are not relevant to coverage. For example:
- The BCB CFG ignores (excludes) branches considered not relevant
to the current coverage solution. It excludes unwind-related code2
that is injected by the Rust compiler but has no physical source
code to count, which allows a
Call-terminated BasicBlock to be merged with its successor, within a single BCB. - A
Goto-terminatedBasicBlockcan be merged with its successor as long as it has the only incoming edge to the successorBasicBlock. - Some BasicBlock terminators support Rust-specific concerns--like
borrow-checking--that are not relevant to coverage analysis.
FalseUnwind, for example, can be treated the same as aGoto(potentially merged with its successor into the same BCB).
(Note, however, that Issue #78544 considers
providing future support for coverage of programs that intentionally
panic, as an option, with some non-trivial cost.)
The BCB CFG is critical to simplifying the coverage analysis by ensuring graph path-based
queries (is_dominated_by(), predecessors, successors, etc.) have branch (control flow)
significance.
make_bcb_counters()
make_bcb_counters traverses the CoverageGraph and adds a
Counter or Expression to every BCB. It uses Control Flow Analysis
to determine where an Expression can be used in place of a Counter.
Expressions have no runtime overhead, so if a viable expression (adding or
subtracting two other counters or expressions) can compute the same result as
an embedded counter, an Expression is preferred.
TraverseCoverageGraphWithLoops
provides a traversal order that ensures all BasicCoverageBlock nodes in a
loop are visited before visiting any node outside that loop. The traversal
state includes a context_stack, with the current loop's context information
(if in a loop), as well as context for nested loops.
Within loops, nodes with multiple outgoing edges (generally speaking, these
are BCBs terminated in a SwitchInt) can be optimized when at least one
branch exits the loop and at least one branch stays within the loop. (For an
if or while, there are only two branches, but a match may have more.)
A branch that does not exit the loop should be counted by Expression, if
possible. Note that some situations require assigning counters to BCBs before
they are visited by traversal, so the counter_kind (CoverageKind for
a Counter or Expression) may have already been assigned, in which case
one of the other branches should get the Expression.
For a node with more than two branches (such as for more than two
match patterns), only one branch can be optimized by Expression. All
others require a Counter (unless its BCB counter_kind was previously
assigned).
A branch expression is derived from the equation:
Counter(branching_node) = SUM(Counter(branches))
It's important to
be aware that the branches in this equation are the outgoing edges
from the branching_node, but a branch's target node may have other
incoming edges. Given the following graph, for example, the count for
B is the sum of its two incoming edges:

In this situation, BCB node B may require an edge counter for its
"edge from A", and that edge might be computed from an Expression,
Counter(A) - Counter(C). But an expression for the BCB node B
would be the sum of all incoming edges:
Expression((Counter(A) - Counter(C)) + SUM(Counter(remaining_edges)))
Note that this is only one possible configuration. The actual choice
of Counter vs. Expression also depends on the order of counter
assignments, and whether a BCB or incoming edge counter already has
its Counter or Expression.
Sanitizers Support
The rustc compiler contains support for following sanitizers:
- AddressSanitizer a faster memory error detector. Can detect out-of-bounds access to heap, stack, and globals, use after free, use after return, double free, invalid free, memory leaks.
- ControlFlowIntegrity LLVM Control Flow Integrity (CFI) provides forward-edge control flow protection.
- Hardware-assisted AddressSanitizer a tool similar to AddressSanitizer but based on partial hardware assistance.
- KernelControlFlowIntegrity LLVM Kernel Control Flow Integrity (KCFI) provides forward-edge control flow protection for operating systems kernels.
- LeakSanitizer a run-time memory leak detector.
- MemorySanitizer a detector of uninitialized reads.
- ThreadSanitizer a fast data race detector.
How to use the sanitizers?
To enable a sanitizer compile with -Z sanitizer=... option, where value is one
of address, cfi, hwaddress, kcfi, leak, memory or thread. For more
details on how to use sanitizers please refer to the sanitizer flag in the
unstable book.
How are sanitizers implemented in rustc?
The implementation of sanitizers (except CFI) relies almost entirely on LLVM. The rustc is an integration point for LLVM compile time instrumentation passes and runtime libraries. Highlight of the most important aspects of the implementation:
-
The sanitizer runtime libraries are part of the compiler-rt project, and will be built on supported targets when enabled in
config.toml:[build] sanitizers = trueThe runtimes are placed into target libdir.
-
During LLVM code generation, the functions intended for instrumentation are marked with appropriate LLVM attribute:
SanitizeAddress,SanitizeHWAddress,SanitizeMemory, orSanitizeThread. By default all functions are instrumented, but this behaviour can be changed with#[no_sanitize(...)]. -
The decision whether to perform instrumentation or not is possible only at a function granularity. In the cases were those decision differ between functions it might be necessary to inhibit inlining, both at MIR level and LLVM level.
-
The LLVM IR generated by rustc is instrumented by dedicated LLVM passes, different for each sanitizer. Instrumentation passes are invoked after optimization passes.
-
When producing an executable, the sanitizer specific runtime library is linked in. The libraries are searched for in the target libdir. First relative to the overridden system root and subsequently relative to the default system root. Fall-back to the default system root ensures that sanitizer runtimes remain available when using sysroot overrides constructed by cargo
-Z build-stdor xargo.
Testing sanitizers
Sanitizers are validated by code generation tests in
tests/codegen/sanitize*.rs and end-to-end functional tests in
tests/ui/sanitizer/ directory.
Testing sanitizer functionality requires the sanitizer runtimes (built when
sanitizer = true in config.toml) and target providing support for particular
sanitizer. When sanitizer is unsupported on given target, sanitizers tests will
be ignored. This behaviour is controlled by compiletest needs-sanitizer-*
directives.
Enabling sanitizer on a new target
To enable a sanitizer on a new target which is already supported by LLVM:
- Include the sanitizer in the list of
supported_sanitizersin the target definition.rustc --target .. -Zsanitizer=..should now recognize sanitizer as supported. - Build the runtime for the target and include it in the libdir.
- Teach compiletest that your target now supports the sanitizer.
Tests marked with
needs-sanitizer-*should now run on the target. - Run tests
./x test --force-rerun tests/ui/sanitize/to verify. - --enable-sanitizers in the CI configuration to build and distribute the sanitizer runtime as part of the release process.
Additional Information
- Sanitizers project page
- AddressSanitizer in Clang
- ControlFlowIntegrity in Clang
- Hardware-assisted AddressSanitizer
- KernelControlFlowIntegrity in Clang
- LeakSanitizer in Clang
- MemorySanitizer in Clang
- ThreadSanitizer in Clang
Debugging support in the Rust compiler
- Preliminaries
- Supported debuggers
- DWARF and
rustc - Developer notes
- What is missing
- Typical process for a Debug Info change (LLVM)
- Source file checksums in debug info
- Future work
This document explains the state of debugging tools support in the Rust compiler (rustc). It gives an overview of GDB, LLDB, WinDbg/CDB, as well as infrastructure around Rust compiler to debug Rust code. If you want to learn how to debug the Rust compiler itself, see Debugging the Compiler.
The material is gathered from the video, Tom Tromey discusses debugging support in rustc.
Preliminaries
Debuggers
According to Wikipedia
A debugger or debugging tool is a computer program that is used to test and debug other programs (the "target" program).
Writing a debugger from scratch for a language requires a lot of work, especially if debuggers have to be supported on various platforms. GDB and LLDB, however, can be extended to support debugging a language. This is the path that Rust has chosen. This document's main goal is to document the said debuggers support in Rust compiler.
DWARF
According to the DWARF standard website
DWARF is a debugging file format used by many compilers and debuggers to support source level debugging. It addresses the requirements of a number of procedural languages, such as C, C++, and Fortran, and is designed to be extensible to other languages. DWARF is architecture independent and applicable to any processor or operating system. It is widely used on Unix, Linux and other operating systems, as well as in stand-alone environments.
DWARF reader is a program that consumes the DWARF format and creates debugger compatible output.
This program may live in the compiler itself. DWARF uses a data structure called
Debugging Information Entry (DIE) which stores the information as "tags" to denote functions,
variables etc., e.g., DW_TAG_variable, DW_TAG_pointer_type, DW_TAG_subprogram etc.
You can also invent your own tags and attributes.
CodeView/PDB
PDB (Program Database) is a file format created by Microsoft that contains debug information. PDBs can be consumed by debuggers such as WinDbg/CDB and other tools to display debug information. A PDB contains multiple streams that describe debug information about a specific binary such as types, symbols, and source files used to compile the given binary. CodeView is another format which defines the structure of symbol records and type records that appear within PDB streams.
Supported debuggers
GDB
Rust expression parser
To be able to show debug output, we need an expression parser. This (GDB) expression parser is written in Bison, and can parse only a subset of Rust expressions. GDB parser was written from scratch and has no relation to any other parser, including that of rustc.
GDB has Rust-like value and type output. It can print values and types in a way that look like Rust syntax in the output. Or when you print a type as ptype in GDB, it also looks like Rust source code. Checkout the documentation in the manual for GDB/Rust.
Parser extensions
Expression parser has a couple of extensions in it to facilitate features that you cannot do with Rust. Some limitations are listed in the manual for GDB/Rust. There is some special code in the DWARF reader in GDB to support the extensions.
A couple of examples of DWARF reader support needed are as follows:
-
Enum: Needed for support for enum types. The Rust compiler writes the information about enum into DWARF, and GDB reads the DWARF to understand where is the tag field, or if there is a tag field, or if the tag slot is shared with non-zero optimization etc.
-
Dissect trait objects: DWARF extension where the trait object's description in the DWARF also points to a stub description of the corresponding vtable which in turn points to the concrete type for which this trait object exists. This means that you can do a
print *objectfor that trait object, and GDB will understand how to find the correct type of the payload in the trait object.
TODO: Figure out if the following should be mentioned in the GDB-Rust document rather than this guide page so there is no duplication. This is regarding the following comments:
gdb's Rust extensions and limitations are documented in the gdb manual: https://sourceware.org/gdb/onlinedocs/gdb/Rust.html -- however, this neglects to mention that gdb convenience variables and registers follow the gdb $ convention, and that the Rust parser implements the gdb @ extension.
@tromey do you think we should mention this part in the GDB-Rust document rather than this document so there is no duplication etc.?
LLDB
Rust expression parser
This expression parser is written in C++. It is a type of Recursive Descent parser. It implements slightly less of the Rust language than GDB. LLDB has Rust-like value and type output.
Developer notes
- LLDB has a plugin architecture but that does not work for language support.
- GDB generally works better on Linux.
WinDbg/CDB
Microsoft provides Windows Debugging Tools such as the Windows Debugger (WinDbg) and
the Console Debugger (CDB) which both support debugging programs written in Rust. These
debuggers parse the debug info for a binary from the PDB, if available, to construct a
visualization to serve up in the debugger.
Natvis
Both WinDbg and CDB support defining and viewing custom visualizations for any given type
within the debugger using the Natvis framework. The Rust compiler defines a set of Natvis
files that define custom visualizations for a subset of types in the standard libraries such
as, std, core, and alloc. These Natvis files are embedded into PDBs generated by the
*-pc-windows-msvc target triples to automatically enable these custom visualizations when
debugging. This default can be overridden by setting the strip rustc flag to either debuginfo
or symbols.
Rust has support for embedding Natvis files for crates outside of the standard libraries by
using the #[debugger_visualizer] attribute.
For more details on how to embed debugger visualizers,
please refer to the section on the debugger_visualizer attribute.
DWARF and rustc
DWARF is the standard way compilers generate debugging information that debuggers read. It is the debugging format on macOS and Linux. It is a multi-language and extensible format, and is mostly good enough for Rust's purposes. Hence, the current implementation reuses DWARF's concepts. This is true even if some of the concepts in DWARF do not align with Rust semantically because, generally, there can be some kind of mapping between the two.
We have some DWARF extensions that the Rust compiler emits and the debuggers understand that are not in the DWARF standard.
-
Rust compiler will emit DWARF for a virtual table, and this
vtableobject will have aDW_AT_containing_typethat points to the real type. This lets debuggers dissect a trait object pointer to correctly find the payload. E.g., here's such a DIE, from a test case in the gdb repository:<1><1a9>: Abbrev Number: 3 (DW_TAG_structure_type) <1aa> DW_AT_containing_type: <0x1b4> <1ae> DW_AT_name : (indirect string, offset: 0x23d): vtable <1b2> DW_AT_byte_size : 0 <1b3> DW_AT_alignment : 8 -
The other extension is that the Rust compiler can emit a tagless discriminated union. See DWARF feature request for this item.
Current limitations of DWARF
- Traits - require a bigger change than normal to DWARF, on how to represent Traits in DWARF.
- DWARF provides no way to differentiate between Structs and Tuples. Rust compiler emits
fields with
__0and debuggers look for a sequence of such names to overcome this limitation. For example, in this case the debugger would look at a field viax.__0instead ofx.0. This is resolved via the Rust parser in the debugger so now you can dox.0.
DWARF relies on debuggers to know some information about platform ABI. Rust does not do that all the time.
Developer notes
This section is from the talk about certain aspects of development.
What is missing
Code signing for LLDB debug server on macOS
According to Wikipedia, System Integrity Protection is
System Integrity Protection (SIP, sometimes referred to as rootless) is a security feature of Apple's macOS operating system introduced in OS X El Capitan. It comprises a number of mechanisms that are enforced by the kernel. A centerpiece is the protection of system-owned files and directories against modifications by processes without a specific "entitlement", even when executed by the root user or a user with root privileges (sudo).
It prevents processes using ptrace syscall. If a process wants to use ptrace it has to be
code signed. The certificate that signs it has to be trusted on your machine.
See Apple developer documentation for System Integrity Protection.
We may need to sign up with Apple and get the keys to do this signing. Tom has looked into if Mozilla cannot do this because it is at the maximum number of keys it is allowed to sign. Tom does not know if Mozilla could get more keys.
Alternatively, Tom suggests that maybe a Rust legal entity is needed to get the keys via Apple. This problem is not technical in nature. If we had such a key we could sign GDB as well and ship that.
DWARF and Traits
Rust traits are not emitted into DWARF at all. The impact of this is calling a method x.method()
does not work as is. The reason being that method is implemented by a trait, as opposed
to a type. That information is not present so finding trait methods is missing.
DWARF has a notion of interface types (possibly added for Java). Tom's idea was to use this interface type as traits.
DWARF only deals with concrete names, not the reference types. So, a given implementation of a
trait for a type would be one of these interfaces (DW_tag_interface type). Also, the type for
which it is implemented would describe all the interfaces this type implements. This requires a
DWARF extension.
Issue on Github: https://github.com/rust-lang/rust/issues/33014
Typical process for a Debug Info change (LLVM)
LLVM has Debug Info (DI) builders. This is the primary thing that Rust calls into. This is why we need to change LLVM first because that is emitted first and not DWARF directly. This is a kind of metadata that you construct and hand-off to LLVM. For the Rustc/LLVM hand-off some LLVM DI builder methods are called to construct representation of a type.
The steps of this process are as follows:
-
LLVM needs changing.
LLVM does not emit Interface types at all, so this needs to be implemented in the LLVM first.
Get sign off on LLVM maintainers that this is a good idea.
-
Change the DWARF extension.
-
Update the debuggers.
Update DWARF readers, expression evaluators.
-
Update Rust compiler.
Change it to emit this new information.
Procedural macro stepping
A deeply profound question is that how do you actually debug a procedural macro? What is the location you emit for a macro expansion? Consider some of the following cases -
- You can emit location of the invocation of the macro.
- You can emit the location of the definition of the macro.
- You can emit locations of the content of the macro.
RFC: https://github.com/rust-lang/rfcs/pull/2117
Focus is to let macros decide what to do. This can be achieved by having some kind of attribute that lets the macro tell the compiler where the line marker should be. This affects where you set the breakpoints and what happens when you step it.
Source file checksums in debug info
Both DWARF and CodeView (PDB) support embedding a cryptographic hash of each source file that contributed to the associated binary.
The cryptographic hash can be used by a debugger to verify that the source file matches the executable. If the source file does not match, the debugger can provide a warning to the user.
The hash can also be used to prove that a given source file has not been modified since it was used to compile an executable. Because MD5 and SHA1 both have demonstrated vulnerabilities, using SHA256 is recommended for this application.
The Rust compiler stores the hash for each source file in the corresponding SourceFile in
the SourceMap. The hashes of input files to external crates are stored in rlib metadata.
A default hashing algorithm is set in the target specification. This allows the target to specify the best hash available, since not all targets support all hash algorithms.
The hashing algorithm for a target can also be overridden with the -Z source-file-checksum=
command-line option.
DWARF 5
DWARF version 5 supports embedding an MD5 hash to validate the source file version in use. DWARF 5 - Section 6.2.4.1 opcode DW_LNCT_MD5
LLVM
LLVM IR supports MD5 and SHA1 (and SHA256 in LLVM 11+) source file checksums in the DIFile node.
Microsoft Visual C++ Compiler /ZH option
The MSVC compiler supports embedding MD5, SHA1, or SHA256 hashes in the PDB using the /ZH
compiler option.
Clang
Clang always embeds an MD5 checksum, though this does not appear in documentation.
Future work
Name mangling changes
- New demangler in
libiberty(gcc source tree). - New demangler in LLVM or LLDB.
TODO: Check the location of the demangler source. #1157
Reuse Rust compiler for expressions
This is an important idea because debuggers by and large do not try to implement type inference. You need to be much more explicit when you type into the debugger than your actual source code. So, you cannot just copy and paste an expression from your source code to debugger and expect the same answer but this would be nice. This can be helped by using compiler.
It is certainly doable but it is a large project. You certainly need a bridge to the debugger because the debugger alone has access to the memory. Both GDB (gcc) and LLDB (clang) have this feature. LLDB uses Clang to compile code to JIT and GDB can do the same with GCC.
Both debuggers expression evaluation implement both a superset and a subset of Rust. They implement just the expression language, but they also add some extensions like GDB has convenience variables. Therefore, if you are taking this route, then you not only need to do this bridge, but may have to add some mode to let the compiler understand some extensions.
Background topics
This section covers a numbers of common compiler terms that arise in this guide. We try to give the general definition while providing some Rust-specific context.
What is a control-flow graph?
A control-flow graph (CFG) is a common term from compilers. If you've ever used a flow-chart, then the concept of a control-flow graph will be pretty familiar to you. It's a representation of your program that clearly exposes the underlying control flow.
A control-flow graph is structured as a set of basic blocks connected by edges. The key idea of a basic block is that it is a set of statements that execute "together" – that is, whenever you branch to a basic block, you start at the first statement and then execute all the remainder. Only at the end of the block is there the possibility of branching to more than one place (in MIR, we call that final statement the terminator):
bb0: {
statement0;
statement1;
statement2;
...
terminator;
}
Many expressions that you are used to in Rust compile down to multiple basic blocks. For example, consider an if statement:
a = 1;
if some_variable {
b = 1;
} else {
c = 1;
}
d = 1;
This would compile into four basic blocks in MIR. In textual form, it looks like this:
BB0: {
a = 1;
if some_variable {
goto BB1;
} else {
goto BB2;
}
}
BB1: {
b = 1;
goto BB3;
}
BB2: {
c = 1;
goto BB3;
}
BB3: {
d = 1;
...
}
In graphical form, it looks like this:
BB0
+--------------------+
| a = 1; |
+--------------------+
/ \
if some_variable else
/ \
BB1 / \ BB2
+-----------+ +-----------+
| b = 1; | | c = 1; |
+-----------+ +-----------+
\ /
\ /
\ BB3 /
+----------+
| d = 1; |
| ... |
+----------+
When using a control-flow graph, a loop simply appears as a cycle in
the graph, and the break keyword translates into a path out of that
cycle.
What is a dataflow analysis?
Static Program Analysis by Anders Møller and Michael I. Schwartzbach is an incredible resource!
Dataflow analysis is a type of static analysis that is common in many compilers. It describes a general technique, rather than a particular analysis.
The basic idea is that we can walk over a control-flow graph (CFG) and
keep track of what some value could be. At the end of the walk, we might have
shown that some claim is true or not necessarily true (e.g. "this variable must
be initialized"). rustc tends to do dataflow analyses over the MIR, since MIR
is already a CFG.
For example, suppose we want to check that x is initialized before it is used
in this snippet:
fn foo() {
let mut x;
if some_cond {
x = 1;
}
dbg!(x);
}
A CFG for this code might look like this:
+------+
| Init | (A)
+------+
| \
| if some_cond
else \ +-------+
| \| x = 1 | (B)
| +-------+
| /
+---------+
| dbg!(x) | (C)
+---------+
We can do the dataflow analysis as follows: we will start off with a flag init
which indicates if we know x is initialized. As we walk the CFG, we will
update the flag. At the end, we can check its value.
So first, in block (A), the variable x is declared but not initialized, so
init = false. In block (B), we initialize the value, so we know that x is
initialized. So at the end of (B), init = true.
Block (C) is where things get interesting. Notice that there are two incoming
edges, one from (A) and one from (B), corresponding to whether some_cond is true or not.
But we cannot know that! It could be the case the some_cond is always true,
so that x is actually always initialized. It could also be the case that
some_cond depends on something random (e.g. the time), so x may not be
initialized. In general, we cannot know statically (due to Rice's
Theorem). So what should the value of init be in block (C)?
Generally, in dataflow analyses, if a block has multiple parents (like (C) in our example), its dataflow value will be some function of all its parents (and of course, what happens in (C)). Which function we use depends on the analysis we are doing.
In this case, we want to be able to prove definitively that x must be
initialized before use. This forces us to be conservative and assume that
some_cond might be false sometimes. So our "merging function" is "and". That
is, init = true in (C) if init = true in (A) and in (B) (or if x is
initialized in (C)). But this is not the case; in particular, init = false in
(A), and x is not initialized in (C). Thus, init = false in (C); we can
report an error that "x may not be initialized before use".
There is definitely a lot more that can be said about dataflow analyses. There is an
extensive body of research literature on the topic, including a lot of theory.
We only discussed a forwards analysis, but backwards dataflow analysis is also
useful. For example, rather than starting from block (A) and moving forwards,
we might have started with the usage of x and moved backwards to try to find
its initialization.
What is "universally quantified"? What about "existentially quantified"?
In math, a predicate may be universally quantified or existentially quantified:
- Universal quantification:
- the predicate holds if it is true for all possible inputs.
- Traditional notation: ∀x: P(x). Read as "for all x, P(x) holds".
- Existential quantification:
- the predicate holds if there is any input where it is true, i.e., there only has to be a single input.
- Traditional notation: ∃x: P(x). Read as "there exists x such that P(x) holds".
In Rust, they come up in type checking and trait solving. For example,
fn foo<T>()
This function claims that the function is well-typed for all types T: ∀ T: well_typed(foo).
Another example:
fn foo<'a>(_: &'a usize)
This function claims that for any lifetime 'a (determined by the
caller), it is well-typed: ∀ 'a: well_typed(foo).
Another example:
fn foo<F>()
where for<'a> F: Fn(&'a u8)
This function claims that it is well-typed for all types F such that for all
lifetimes 'a, F: Fn(&'a u8): ∀ F: ∀ 'a: (F: Fn(&'a u8)) => well_typed(foo).
One more example:
fn foo(_: dyn Debug)
This function claims that there exists some type T that implements Debug
such that the function is well-typed: ∃ T: (T: Debug) and well_typed(foo).
What is a de Bruijn Index?
De Bruijn indices are a way of representing, using only integers,
which variables are bound in which binders. They were originally invented for
use in lambda calculus evaluation (see this Wikipedia article for
more). In rustc, we use de Bruijn indices to represent generic types.
Here is a basic example of how de Bruijn indices might be used for closures (we
don't actually do this in rustc though!):
|x| {
f(x) // de Bruijn index of `x` is 1 because `x` is bound 1 level up
|y| {
g(x, y) // index of `x` is 2 because it is bound 2 levels up
// index of `y` is 1 because it is bound 1 level up
}
}
What are co- and contra-variance?
Check out the subtyping chapter from the Rust Nomicon.
See the variance chapter of this guide for more info on how the type checker handles variance.
What is a "free region" or a "free variable"? What about "bound region"?
Let's describe the concepts of free vs bound in terms of program variables, since that's the thing we're most familiar with.
- Consider this expression, which creates a closure:
|a, b| a + b. Here, theaandbina + brefer to the arguments that the closure will be given when it is called. We say that theaandbthere are bound to the closure, and that the closure signature|a, b|is a binder for the namesaandb(because any references toaorbwithin refer to the variables that it introduces). - Consider this expression:
a + b. In this expression,aandbrefer to local variables that are defined outside of the expression. We say that those variables appear free in the expression (i.e., they are free, not bound (tied up)).
So there you have it: a variable "appears free" in some expression/statement/whatever if it refers to something defined outside of that expressions/statement/whatever. Equivalently, we can then refer to the "free variables" of an expression – which is just the set of variables that "appear free".
So what does this have to do with regions? Well, we can apply the
analogous concept to type and regions. For example, in the type &'a u32, 'a appears free. But in the type for<'a> fn(&'a u32), it
does not.
Further Reading About Compilers
Thanks to
mem,scottmcm, andLevion the official Discord for the recommendations, and totinaunfor posting a link to a twitter thread from Graydon Hoare which had some more recommendations!Other sources: https://gcc.gnu.org/wiki/ListOfCompilerBooks
If you have other suggestions, please feel free to open an issue or PR.
Books
- Types and Programming Languages
- Programming Language Pragmatics
- Practical Foundations for Programming Languages
- Compilers: Principles, Techniques, and Tools, 2nd Edition
- Garbage Collection: Algorithms for Automatic Dynamic Memory Management
- Linkers and Loaders (There are also free versions of this, but the version we had linked seems to be offline at the moment.)
- Advanced Compiler Design and Implementation
- Building an Optimizing Compiler
- Crafting Interpreters
Courses
Wikis
Misc Papers and Blog Posts
Glossary
| Term | Meaning |
|---|---|
| arena, arena allocation | An arena is a large memory buffer from which other memory allocations are made. This style of allocation is called arena allocation. See this chapter for more info. |
| AST | The abstract syntax tree produced by the rustc_ast crate; reflects user syntax very closely. |
| APIT | An argument-position impl Trait. Also known as an anonymous type parameter. (see the reference). |
| binder | A binder is a place where a variable or type is declared; for example, the <T> is a binder for the generic type parameter T in fn foo<T>(..), and |a| ... is a binder for the parameter a. See the background chapter for more. |
BodyId | An identifier that refers to a specific body (definition of a function or constant) in the crate. See the HIR chapter for more. |
| bound variable | A bound variable is one that is declared within an expression/term. For example, the variable a is bound within the closure expression |a| a * 2. See the background chapter for more |
| codegen | Short for code generation. The code to translate MIR into LLVM IR. |
| codegen unit | When we produce LLVM IR, we group the Rust code into a number of codegen units (sometimes abbreviated as CGUs). Each of these units is processed by LLVM independently from one another, enabling parallelism. They are also the unit of incremental re-use. (see more) |
| completeness | A technical term in type theory, it means that every type-safe program also type-checks. Having both soundness and completeness is very hard, and usually soundness is more important. (see "soundness"). |
| control-flow graph | A representation of the control-flow of a program; see the background chapter for more |
| CTFE | Short for compile-time function evaluation, this is the ability of the compiler to evaluate const fns at compile time. This is part of the compiler's constant evaluation system. (see more) |
cx | We tend to use cx as an abbreviation for context. See also tcx, infcx, etc. |
ctxt | We also use ctxt as an abbreviation for context, e.g. TyCtxt. See also cx or tcx. |
| DAG | A directed acyclic graph is used during compilation to keep track of dependencies between queries. (see more) |
| data-flow analysis | A static analysis that figures out what properties are true at each point in the control-flow of a program; see the background chapter for more. |
| de Bruijn index | A technique for describing which binder a variable is bound by using only integers. It has the benefit that it is invariant under variable renaming. (see more) |
DefId | An index identifying a definition (see rustc_middle/src/hir/def_id.rs). Uniquely identifies a DefPath. See the HIR chapter for more. |
| discriminant | The underlying value associated with an enum variant or generator state to indicate it as "active" (but not to be confused with its "variant index"). At runtime, the discriminant of the active variant is encoded in the tag. |
| double pointer | A pointer with additional metadata. See fat pointer for more. |
| drop glue | (Internal) compiler-generated instructions that handle calling the destructors (Drop) for data types. |
| DST | Short for dynamically-sized type, this is a type for which the compiler cannot statically know the size in memory (e.g. str or [u8]). Such types don't implement Sized and cannot be allocated on the stack. They can only occur as the last field in a struct. They can only be used behind a pointer (e.g. &str or &[u8]). |
| early-bound lifetime | A lifetime region that is substituted at its definition site. Bound in an item's Generics and substituted/instantiated using a GenericArgs. Contrast with late-bound lifetime. (see more) |
| effects | Right now only means const traits and ~const bounds. (see more) |
| empty type | See uninhabited type. |
| fat pointer | A two word value carrying the address of some value, along with some further information necessary to put the value to use. Rust includes two kinds of fat pointers: references to slices, and trait objects. A reference to a slice carries the starting address of the slice and its length. A trait object carries a value's address and a pointer to the trait's implementation appropriate to that value. "Fat pointers" are also known as "wide pointers", and "double pointers". |
| free variable | A free variable is one that is not bound within an expression or term; see the background chapter for more |
| generics | The list of generic parameters defined on an item. There are three kinds of generic parameters: Type, lifetime and const parameters. |
| HIR | The high-level IR, created by lowering and desugaring the AST. (see more) |
HirId | Identifies a particular node in the HIR by combining a def-id with an "intra-definition offset". See the HIR chapter for more. |
| HIR map | The HIR map, accessible via tcx.hir(), allows you to quickly navigate the HIR and convert between various forms of identifiers. |
| ICE | Short for internal compiler error, this is when the compiler crashes. |
| ICH | Short for incremental compilation hash, these are used as fingerprints for things such as HIR and crate metadata, to check if changes have been made. This is useful in incremental compilation to see if part of a crate has changed and should be recompiled. |
infcx | The type inference context (InferCtxt). (see rustc_middle::infer) |
| inference variable, infer var | When doing type, region, const inference, an inference variable is a kind of special type/region that represents what you are trying to infer. Think of X in algebra. For example, if we are trying to infer the type of a variable in a program, we create an inference variable to represent that unknown type. |
| intern | Interning refers to storing certain frequently-used constant data, such as strings, and then referring to the data by an identifier (e.g. a Symbol) rather than the data itself, to reduce memory usage and number of allocations. See this chapter for more info. |
| interpreter | The heart of const evaluation, running MIR code at compile time. (see more) |
| intrinsic | Intrinsics are special functions that are implemented in the compiler itself but exposed (often unstably) to users. They do magical and dangerous things. (See std::intrinsics) |
| IR | Short for intermediate representation, a general term in compilers. During compilation, the code is transformed from raw source (ASCII text) to various IRs. In Rust, these are primarily HIR, MIR, and LLVM IR. Each IR is well-suited for some set of computations. For example, MIR is well-suited for the borrow checker, and LLVM IR is well-suited for codegen because LLVM accepts it. |
| IRLO, irlo | Sometimes used as an abbreviation for internals.rust-lang.org. |
| item | A kind of "definition" in the language, such as a static, const, use statement, module, struct, etc. Concretely, this corresponds to the Item type. |
| lang item | Items that represent concepts intrinsic to the language itself, such as special built-in traits like Sync and Send; or traits representing operations such as Add; or functions that are called by the compiler. (see more) |
| late-bound lifetime | A lifetime region that is substituted at its call site. Bound in a HRTB and substituted by specific functions in the compiler, such as liberate_late_bound_regions. Contrast with early-bound lifetime. (see more) |
| local crate | The crate currently being compiled. This is in contrast to "upstream crates" which refer to dependencies of the local crate. |
| LTO | Short for link-time optimizations, this is a set of optimizations offered by LLVM that occur just before the final binary is linked. These include optimizations like removing functions that are never used in the final program, for example. ThinLTO is a variant of LTO that aims to be a bit more scalable and efficient, but possibly sacrifices some optimizations. You may also read issues in the Rust repo about "FatLTO", which is the loving nickname given to non-Thin LTO. LLVM documentation: here and here. |
| LLVM | (actually not an acronym :P) an open-source compiler backend. It accepts LLVM IR and outputs native binaries. Various languages (e.g. Rust) can then implement a compiler front-end that outputs LLVM IR and use LLVM to compile to all the platforms LLVM supports. |
| memoization | The process of storing the results of (pure) computations (such as pure function calls) to avoid having to repeat them in the future. This is typically a trade-off between execution speed and memory usage. |
| MIR | The mid-level IR that is created after type-checking for use by borrowck and codegen. (see more) |
| Miri | A tool to detect Undefined Behavior in (unsafe) Rust code. (see more) |
| monomorphization | The process of taking generic implementations of types and functions and instantiating them with concrete types. For example, in the code we might have Vec<T>, but in the final executable, we will have a copy of the Vec code for every concrete type used in the program (e.g. a copy for Vec<usize>, a copy for Vec<MyStruct>, etc). |
| normalize | A general term for converting to a more canonical form, but in the case of rustc typically refers to associated type normalization. |
| newtype | A wrapper around some other type (e.g., struct Foo(T) is a "newtype" for T). This is commonly used in Rust to give a stronger type for indices. |
| niche | Invalid bit patterns for a type that can be used for layout optimizations. Some types cannot have certain bit patterns. For example, the NonZero* integers or the reference &T cannot be represented by a 0 bitstring. This means the compiler can perform layout optimizations by taking advantage of the invalid "niche value". An example application for this is the Discriminant elision on Option-like enums, which allows using a type's niche as the "tag" for an enum without requiring a separate field. |
| NLL | Short for non-lexical lifetimes, this is an extension to Rust's borrowing system to make it be based on the control-flow graph. |
node-id or NodeId | An index identifying a particular node in the AST or HIR; gradually being phased out and replaced with HirId. See the HIR chapter for more. |
| obligation | Something that must be proven by the trait system. (see more) |
| placeholder | NOTE: skolemization is deprecated by placeholder a way of handling subtyping around "for-all" types (e.g., for<'a> fn(&'a u32)) as well as solving higher-ranked trait bounds (e.g., for<'a> T: Trait<'a>). See the chapter on placeholder and universes for more details. |
| point | Used in the NLL analysis to refer to some particular location in the MIR; typically used to refer to a node in the control-flow graph. |
| polymorphize | An optimization that avoids unnecessary monomorphisation. (see more) |
| projection | A general term for a "relative path", e.g. x.f is a "field projection", and T::Item is an "associated type projection". |
| promoted constants | Constants extracted from a function and lifted to static scope; see this section for more details. |
| provider | The function that executes a query. (see more) |
| quantified | In math or logic, existential and universal quantification are used to ask questions like "is there any type T for which is true?" or "is this true for all types T?"; see the background chapter for more. |
| query | A sub-computation during compilation. Query results can be cached in the current session or to disk for incremental compilation. (see more) |
| recovery | Recovery refers to handling invalid syntax during parsing (e.g. a missing comma) and continuing to parse the AST. This avoid showing spurious errors to the user (e.g. showing 'missing field' errors when the struct definition contains errors). |
| region | Another term for "lifetime" often used in the literature and in the borrow checker. |
| rib | A data structure in the name resolver that keeps track of a single scope for names. (see more) |
| RPIT | A return-position impl Trait. (see the reference). |
| RPITIT | A return-position impl Trait in trait. Unlike RPIT, this is desugared to a generic associated type (GAT). Introduced in RFC 3425. (see more) |
| scrutinee | A scrutinee is the expression that is matched on in match expressions and similar pattern matching constructs. For example, in match x { A => 1, B => 2 }, the expression x is the scrutinee. |
sess | The compiler session, which stores global data used throughout compilation |
| side tables | Because the AST and HIR are immutable once created, we often carry extra information about them in the form of hashtables, indexed by the id of a particular node. |
| sigil | Like a keyword but composed entirely of non-alphanumeric tokens. For example, & is a sigil for references. |
| soundness | A technical term in type theory. Roughly, if a type system is sound, then a program that type-checks is type-safe. That is, one can never (in safe rust) force a value into a variable of the wrong type. (see "completeness"). |
| span | A location in the user's source code, used for error reporting primarily. These are like a file-name/line-number/column tuple on steroids: they carry a start/end point, and also track macro expansions and compiler desugaring. All while being packed into a few bytes (really, it's an index into a table). See the Span datatype for more. |
| subst | The act of substituting the generic parameters inside of a type, constant expression, etc. with concrete generic arguments by supplying substs. Nowadays referred to as instantiating in the compiler. |
| substs | The substitutions for a given generic item (e.g. the i32, u32 in HashMap<i32, u32>). Nowadays referred to as the list of generic arguments in the compiler (but note that strictly speaking these two concepts differ, see the literature). |
| sysroot | The directory for build artifacts that are loaded by the compiler at runtime. (see more) |
| tag | The "tag" of an enum/generator encodes the discriminant of the active variant/state. Tags can either be "direct" (simply storing the discriminant in a field) or use a "niche". |
| TAIT | A type-alias impl Trait. Introduced in RFC 2515. |
tcx | Standard variable name for the "typing context" (TyCtxt), main data structure of the compiler. (see more) |
'tcx | The lifetime of the allocation arenas used by TyCtxt. Most data interned during a compilation session will use this lifetime with the exception of HIR data which uses the 'hir lifetime. (see more) |
| token | The smallest unit of parsing. Tokens are produced after lexing (see more). |
| TLS | Thread-local storage. Variables may be defined so that each thread has its own copy (rather than all threads sharing the variable). This has some interactions with LLVM. Not all platforms support TLS. |
| trait reference, trait ref | The name of a trait along with a suitable list of generic arguments. (see more) |
| trans | Short for translation, the code to translate MIR into LLVM IR. Renamed to codegen. |
Ty | The internal representation of a type. (see more) |
TyCtxt | The data structure often referred to as tcx in code which provides access to session data and the query system. |
| UFCS | Short for universal function call syntax, this is an unambiguous syntax for calling a method. Term no longer in use! Prefer fully-qualified path/syntax. (see more, see the reference) |
| uninhabited type | A type which has no values. This is not the same as a ZST, which has exactly 1 value. An example of an uninhabited type is enum Foo {}, which has no variants, and so, can never be created. The compiler can treat code that deals with uninhabited types as dead code, since there is no such value to be manipulated. ! (the never type) is an uninhabited type. Uninhabited types are also called empty types. |
| upvar | A variable captured by a closure from outside the closure. |
| variance | Determines how changes to a generic parameter affect subtyping; for example, if T is a subtype of U, then Vec<T> is a subtype Vec<U> because Vec is covariant in its generic parameter. See the background chapter for a more general explanation. See the variance chapter for an explanation of how type checking handles variance. |
| variant index | In an enum, identifies a variant by assigning them indices starting at 0. This is purely internal and not to be confused with the "discriminant" which can be overwritten by the user (e.g. enum Bool { True = 42, False = 0 }). |
| well-formedness | Semantically: An expression that evaluates to meaningful result. In type systems: A type related construct which follows rules of the type system. |
| wide pointer | A pointer with additional metadata. See fat pointer for more. |
| ZST | Zero-sized type. A type whose values have size 0 bytes. Since 2^0 = 1, such types can have exactly one value. For example, () (unit) is a ZST. struct Foo; is also a ZST. The compiler can do some nice optimizations around ZSTs. |
Code Index
rustc has a lot of important data structures. This is an attempt to give some guidance on where to learn more about some of the key data structures of the compiler.
| Item | Kind | Short description | Chapter | Declaration |
|---|---|---|---|---|
BodyId | struct | One of four types of HIR node identifiers | Identifiers in the HIR | compiler/rustc_hir/src/hir.rs |
Compiler | struct | Represents a compiler session and can be used to drive a compilation. | The Rustc Driver and Interface | compiler/rustc_interface/src/interface.rs |
ast::Crate | struct | A syntax-level representation of a parsed crate | The parser | compiler/rustc_ast/src/ast.rs |
rustc_hir::Crate | struct | A more abstract, compiler-friendly form of a crate's AST | The Hir | compiler/rustc_hir/src/hir.rs |
DefId | struct | One of four types of HIR node identifiers | Identifiers in the HIR | compiler/rustc_hir/src/def_id.rs |
Diag | struct | A struct for a compiler diagnostic, such as an error or lint | Emitting Diagnostics | compiler/rustc_errors/src/diagnostic.rs |
DocContext | struct | A state container used by rustdoc when crawling through a crate to gather its documentation | Rustdoc | src/librustdoc/core.rs |
HirId | struct | One of four types of HIR node identifiers | Identifiers in the HIR | compiler/rustc_hir/src/hir_id.rs |
NodeId | struct | One of four types of HIR node identifiers. Being phased out | Identifiers in the HIR | compiler/rustc_ast/src/ast.rs |
P | struct | An owned immutable smart pointer. By contrast, &T is not owned, and Box<T> is not immutable. | None | compiler/rustc_ast/src/ptr.rs |
ParamEnv | struct | Information about generic parameters or Self, useful for working with associated or generic items | Parameter Environment | compiler/rustc_middle/src/ty/mod.rs |
ParseSess | struct | This struct contains information about a parsing session | The parser | compiler/rustc_session/src/parse/parse.rs |
Query | struct | Represents the result of query to the Compiler interface and allows stealing, borrowing, and returning the results of compiler passes. | The Rustc Driver and Interface | compiler/rustc_interface/src/queries.rs |
Rib | struct | Represents a single scope of names | Name resolution | compiler/rustc_resolve/src/lib.rs |
Session | struct | The data associated with a compilation session | The parser, The Rustc Driver and Interface | compiler/rustc_session/src/session.rs |
SourceFile | struct | Part of the SourceMap. Maps AST nodes to their source code for a single source file. Was previously called FileMap | The parser | compiler/rustc_span/src/lib.rs |
SourceMap | struct | Maps AST nodes to their source code. It is composed of SourceFiles. Was previously called CodeMap | The parser | compiler/rustc_span/src/source_map.rs |
Span | struct | A location in the user's source code, used for error reporting primarily | Emitting Diagnostics | compiler/rustc_span/src/span_encoding.rs |
StringReader | struct | This is the lexer used during parsing. It consumes characters from the raw source code being compiled and produces a series of tokens for use by the rest of the parser | The parser | compiler/rustc_parse/src/lexer/mod.rs |
rustc_ast::token_stream::TokenStream | struct | An abstract sequence of tokens, organized into TokenTrees | The parser, Macro expansion | compiler/rustc_ast/src/tokenstream.rs |
TraitDef | struct | This struct contains a trait's definition with type information | The ty modules | compiler/rustc_middle/src/ty/trait_def.rs |
TraitRef | struct | The combination of a trait and its input types (e.g. P0: Trait<P1...Pn>) | Trait Solving: Goals and Clauses | compiler/rustc_middle/src/ty/sty.rs |
Ty<'tcx> | struct | This is the internal representation of a type used for type checking | Type checking | compiler/rustc_middle/src/ty/mod.rs |
TyCtxt<'tcx> | struct | The "typing context". This is the central data structure in the compiler. It is the context that you use to perform all manner of queries | The ty modules | compiler/rustc_middle/src/ty/context.rs |
Compiler Lecture Series
These are videos where various experts explain different parts of the compiler:
General
- January 2019: Tom Tromey discusses debugging support in rustc
- June 2019: Responsive compilers - Nicholas Matsakis - PLISS 2019
- June 2019: Things I Learned (TIL) - Nicholas Matsakis - PLISS 2019
Rust Analyzer
- January 2019: How Salsa Works
- January 2019: Salsa In More Depth
- January 2019: Rust analyzer guide
- February 2019: Rust analyzer syntax trees
- March 2019: rust-analyzer type-checker overview by flodiebold
- March 2019: RLS 2.0, Salsa, and Name Resolution
Type System
- July 2015: Felix Klock - Rust: A type system you didn't know you wanted - Curry On
- November 2016: Felix Klock - Subtyping in Rust and Clarke's Third Law
- February 2019: Universes and Lifetimes
- April 2019: Representing types in rustc
- March 2019: RFC #2229 Disjoint Field Capture plan
Closures
- October 2018: closures and upvar capture
- October 2018: blitzerr closure upvar tys
- January 2019: Convert Closure Upvar Representation to Tuples with blitzerr
Chalk
- July 2018: Coherence in Chalk by Sunjay Varma - Bay Area Rust Meetup
- March 2019: rustc-chalk integration overview
- April 2019: How the chalk-engine crate works
- May 2019: How the chalk-engine crate works 2
Polonius
Miri
Async
Code Generation
Rust Bibliography
This is a reading list of material relevant to Rust. It includes prior research that has - at one time or another - influenced the design of Rust, as well as publications about Rust.
Type system
- Alias burying - We tried something similar and abandoned it.
- External uniqueness is unique enough
- Macros that work together
- Making ad-hoc polymorphism less ad hoc
- Region based memory management in Cyclone
- Region Based Memory Management
- Safe manual memory management in Cyclone
- Skolem Normal Form
- Traits: composable units of behavior
- Uniqueness and Reference Immutability for Safe Parallelism
Concurrency
- A Java fork/join calamity - critique of Java's fork/join library, particularly its application of work stealing to non-strict computation
- Algorithms for scalable synchronization of shared-memory multiprocessors
- Balanced work stealing for time-sharing multicores
- Contention aware scheduling
- Dynamic circular work stealing deque - The Chase/Lev deque
- Epoch-based reclamation.
- Language support for fast and reliable message passing in singularity OS
- Non-blocking steal-half work queues
- Reagents: expressing and composing fine-grained concurrency
- Scheduling multithreaded computations by work stealing
- Scheduling techniques for concurrent systems
- Singularity: rethinking the software stack
- The data locality of work stealing
- Thread scheduling for multiprogramming multiprocessors
- Three layer cake for shared-memory programming
- Work-first and help-first scheduling policies for async-finish task parallelism - More general than fully-strict work stealing
Others
- Composing High-Performance Memory Allocators
- Crash-only software
- Reconsidering Custom Memory Allocation
Papers about Rust
- GPU Programming in Rust: Implementing High Level Abstractions in a Systems Level Language. Early GPU work by Eric Holk.
- Parallel closures: a new twist on an old
idea
- not exactly about Rust, but by nmatsakis
- Patina: A Formalization of the Rust Programming Language. Early formalization of a subset of the type system, by Eric Reed.
- Experience Report: Developing the Servo Web Browser Engine using Rust. By Lars Bergstrom.
- Implementing a Generic Radix Trie in Rust. Undergrad paper by Michael Sproul.
- Reenix: Implementing a Unix-Like Operating System in Rust. Undergrad paper by Alex Light.
- Evaluation of performance and productivity metrics of potential programming languages in the HPC environment. Bachelor's thesis by Florian Wilkens. Compares C, Go and Rust.
- Nom, a byte oriented, streaming, zero copy, parser combinators library in Rust. By Geoffroy Couprie, research for VLC.
- Graph-Based Higher-Order Intermediate Representation. An experimental IR implemented in Impala, a Rust-like language.
- Code Refinement of Stencil Codes. Another paper using Impala.
- Parallelization in Rust with fork-join and friends. Linus Farnstrand's master's thesis.
- Session Types for Rust. Philip Munksgaard's master's thesis. Research for Servo.
- Ownership is Theft: Experiences Building an Embedded OS in Rust - Amit Levy, et. al.
- You can't spell trust without Rust. Aria Beingessner's master's thesis.
- Rust-Bio: a fast and safe bioinformatics library. Johannes Köster
- Safe, Correct, and Fast Low-Level Networking. Robert Clipsham's master's thesis.
- Formalizing Rust traits. Jonatan Milewski's master's thesis.
- Rust as a Language for High Performance GC Implementation
- Simple Verification of Rust Programs via Functional Purification. Sebastian Ullrich's master's thesis.
- Writing parsers like it is 2017 Pierre Chifflier and Geoffroy Couprie for the Langsec Workshop
- The Case for Writing a Kernel in Rust
- RustBelt: Securing the Foundations of the Rust Programming Language
- Oxide: The Essence of Rust. By Aaron Weiss, Olek Gierczak, Daniel Patterson, Nicholas D. Matsakis, and Amal Ahmed.
- Polymorphisation: Improving Rust compilation times through intelligent monomorphisation. David Wood's master's thesis.
Humor in Rust
What's a project without a sense of humor? And frankly some of these are enlightening?